
Asymptotic Study of Longitudinal Velocity Influence and Nonlinear Elastic Characteristics of the Oscillating Moving Beam


Abstract
:1. Introduction
2. Materials and Methods
2.1. Mathematical Models of Transverse Vibrations of a Moving Beam under Homogeneous Boundary Conditions
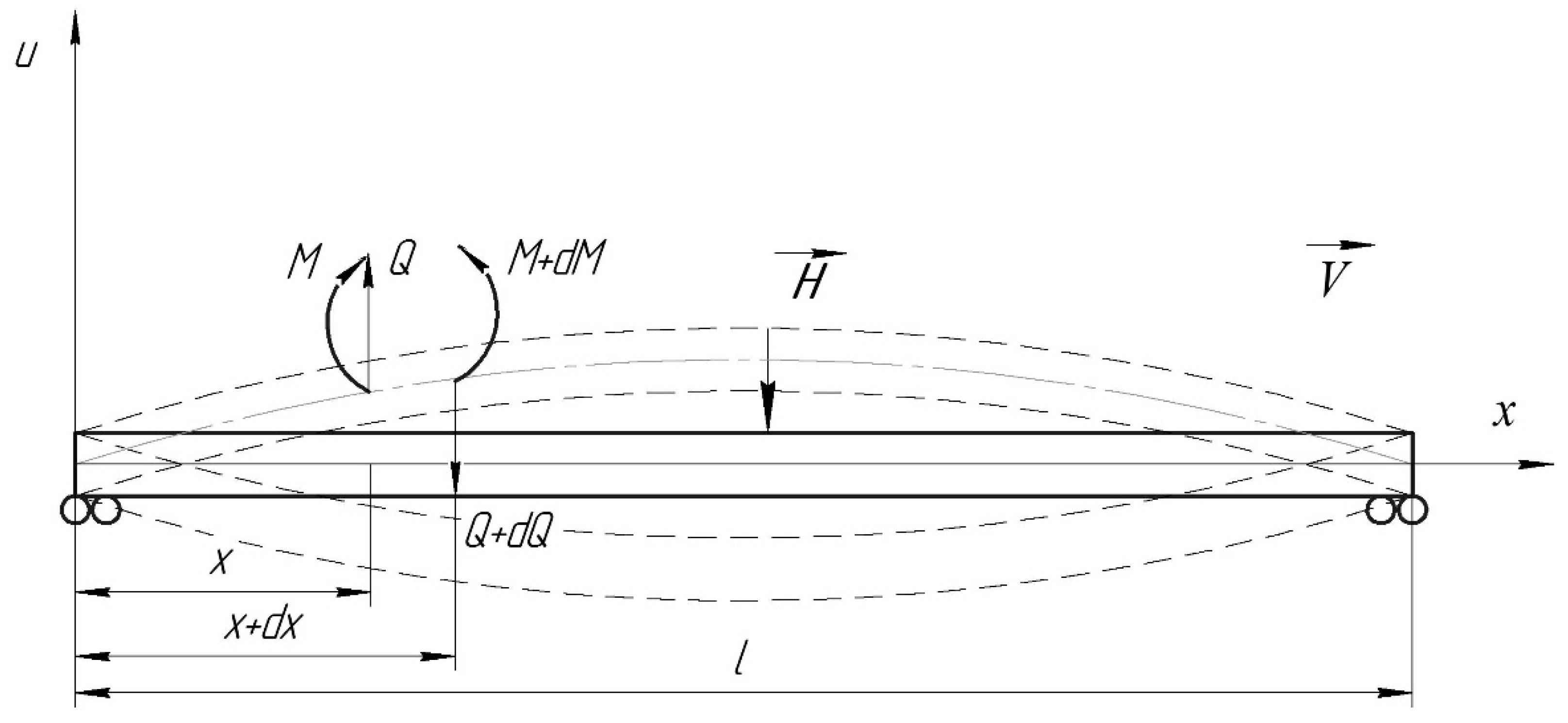
- M is the torque acting on the beam element with coordinate x;
- Q is the force acting on the beam element with coordinate x;
- M + dM is the torque acting on the beam element with coordinate х + dx;
- Q + dQ is the force acting on the beam element with coordinate х + dx;
- H is the harmonic force acting on the beam with its own amplitude and frequency;
- l is the beam length;
- V is the longitudinal speed of a beam moving along its axis.
- Deviations of individual points of the axis of the beam are perpendicular to its rectilinear, undeformed direction. At the same time, the displacement of these points parallel to the axis Ox is neglected;
- Deviations of the points of the beam axis for transverse vibrations occur in one plane (“in the plane of vibrations”);
- The cross-section of the beam is always perpendicular to the axis—that is, it does not undergo deplenation [27].
- m(x) is the mass of a unit of the beam length;
- E is the modulus of elasticity of the first kind (Young’s modulus);
- I is the moment of inertia of the cross-section of the beam relative to the neutral axis of the section, which is perpendicular to the vibration plane.
- -
- the end of the rod is free, and at this end the bending moment and the transverse force are equal to zero: , at ;
- -
- the end of the rod is rigidly fixed, while the deflection and the rotation angle are equal to zero: , at ;
- -
- the end of the rod is freely supported or hinged; then, the deflection and the bending moment are also zero: , at .
- (a)
- (b)
- during vibrations of a homogeneous beam, which is immovably fixed at one end, and its other end is free , where С is a certain constant, which is selected in such a way that the resulting expression at certain t should not go beyond the sign of sine or cosine, and is Krylov’s function, , and ;
- (c)
- during vibrations of a homogeneous beam, the ends of which are immovably fixed , is Krylov’s function, ;
- (d)
- during vibrations of a homogeneous beam with free ends , А is a certain constant, which is selected in such a way that the resulting expression at certain should not go beyond the sign of sine or cosine;
- (e)
- during vibrations of a homogeneous beam, one end of which is rigidly fixed and the other one is hinged, .
2.2. Non-Resonant Case of Vibrations
2.3. Resonant Case of Vibrations
- (a)
- for the case of —
- (b)
- for the case of —
3. Results and Discussion
- non-resonant case—
- resonant case—





4. Conclusions
- The theoretical and practical novelty of this research can be formulated as follows:
- in the paper, firstly, we developed and systematized a procedure to estimate the influence of kinematic and physical–mechanical beam characteristics on the nonlinear transversal oscillations;
- asymptotic methods of the nonlinear mechanics that have been applied to analyze the parameters of the immovable systems are generalized in the case of the movable systems;
- the proposed procedure allows us to extend significantly the classes of problems for which approximate solutions can be obtained with the necessary accuracy in engineering;
- a specific advantage of the developed procedure is possibility to provide engineering calculations using well-known computer packages (Maple, MatLab, etc.).
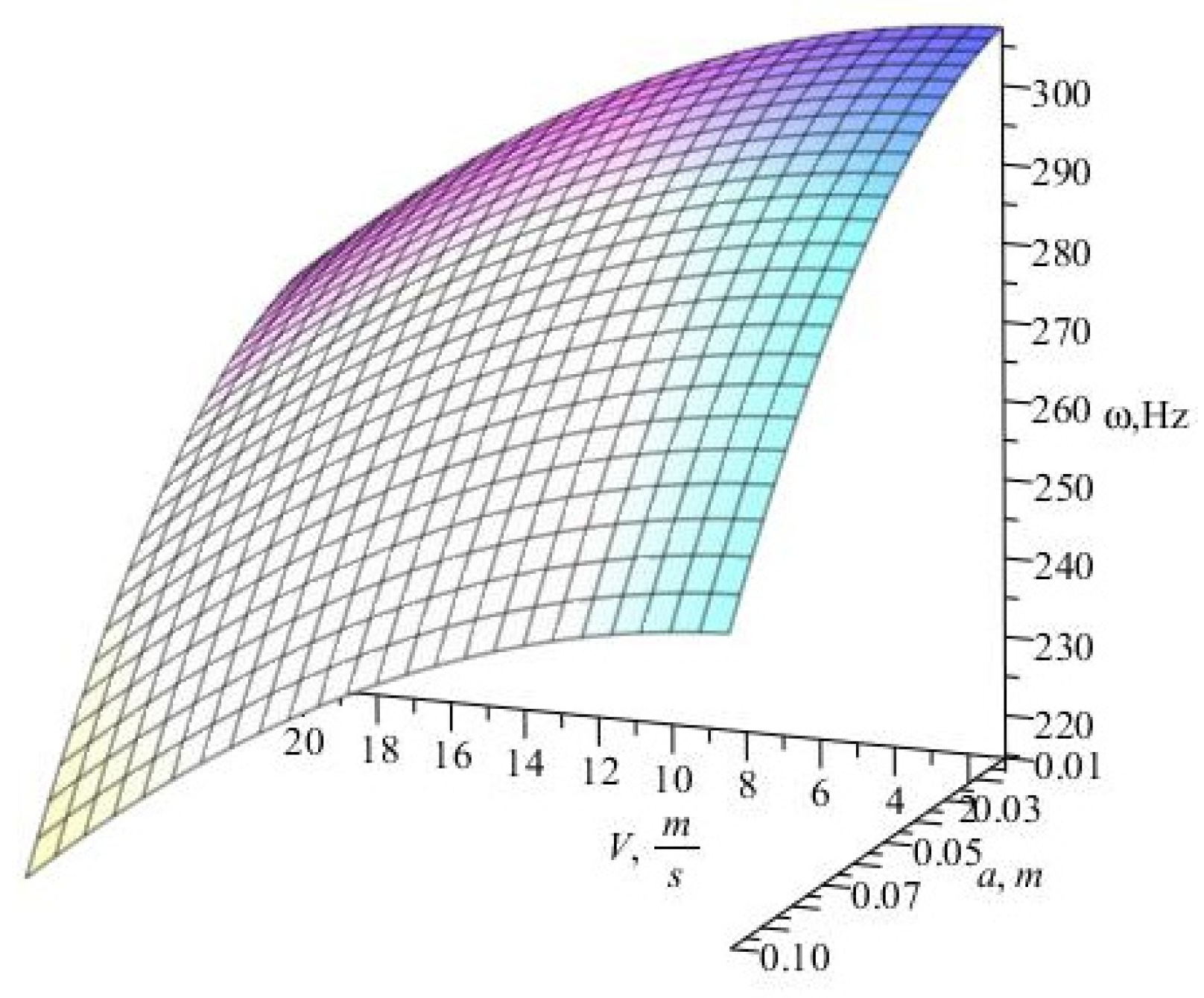
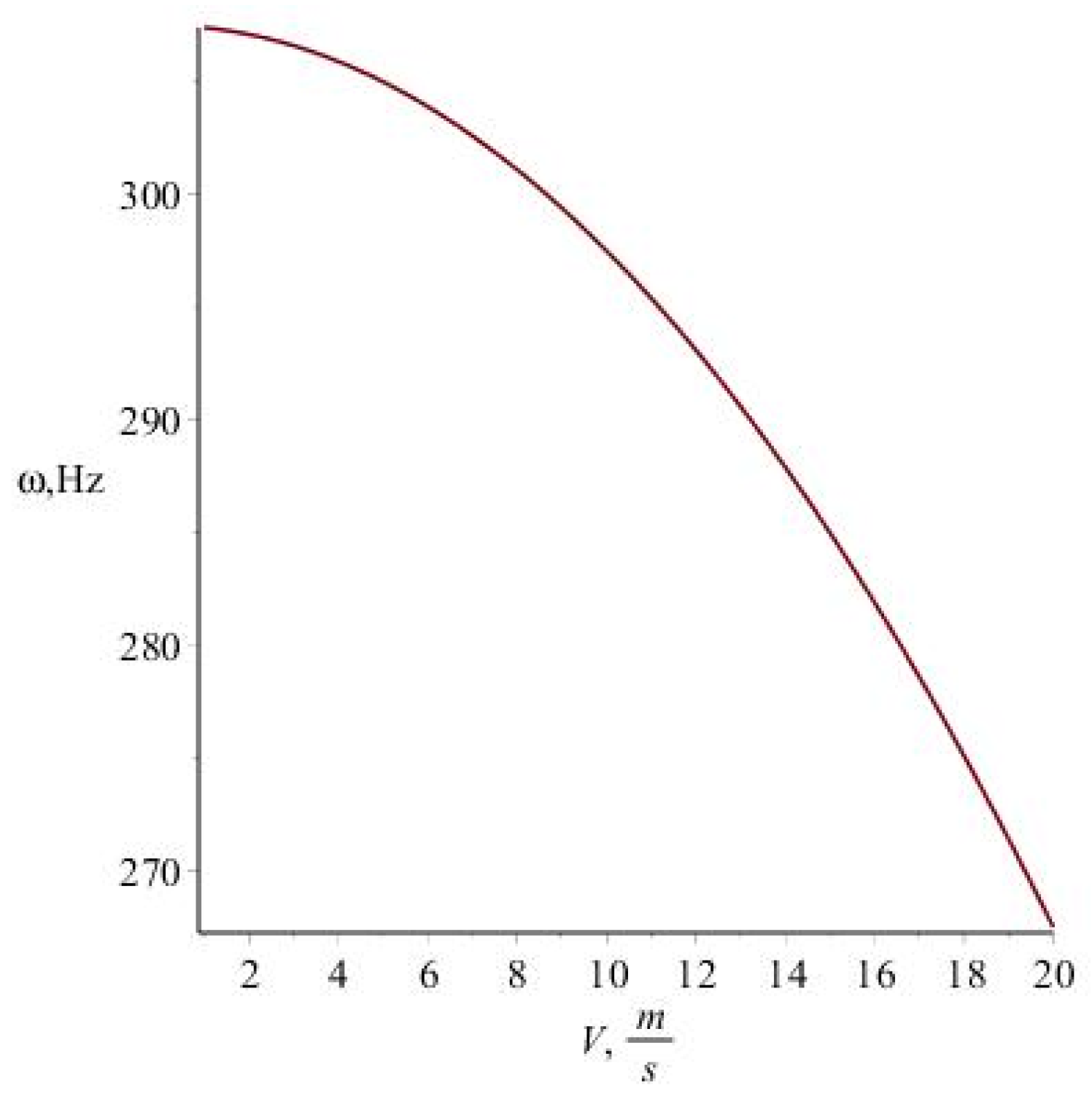
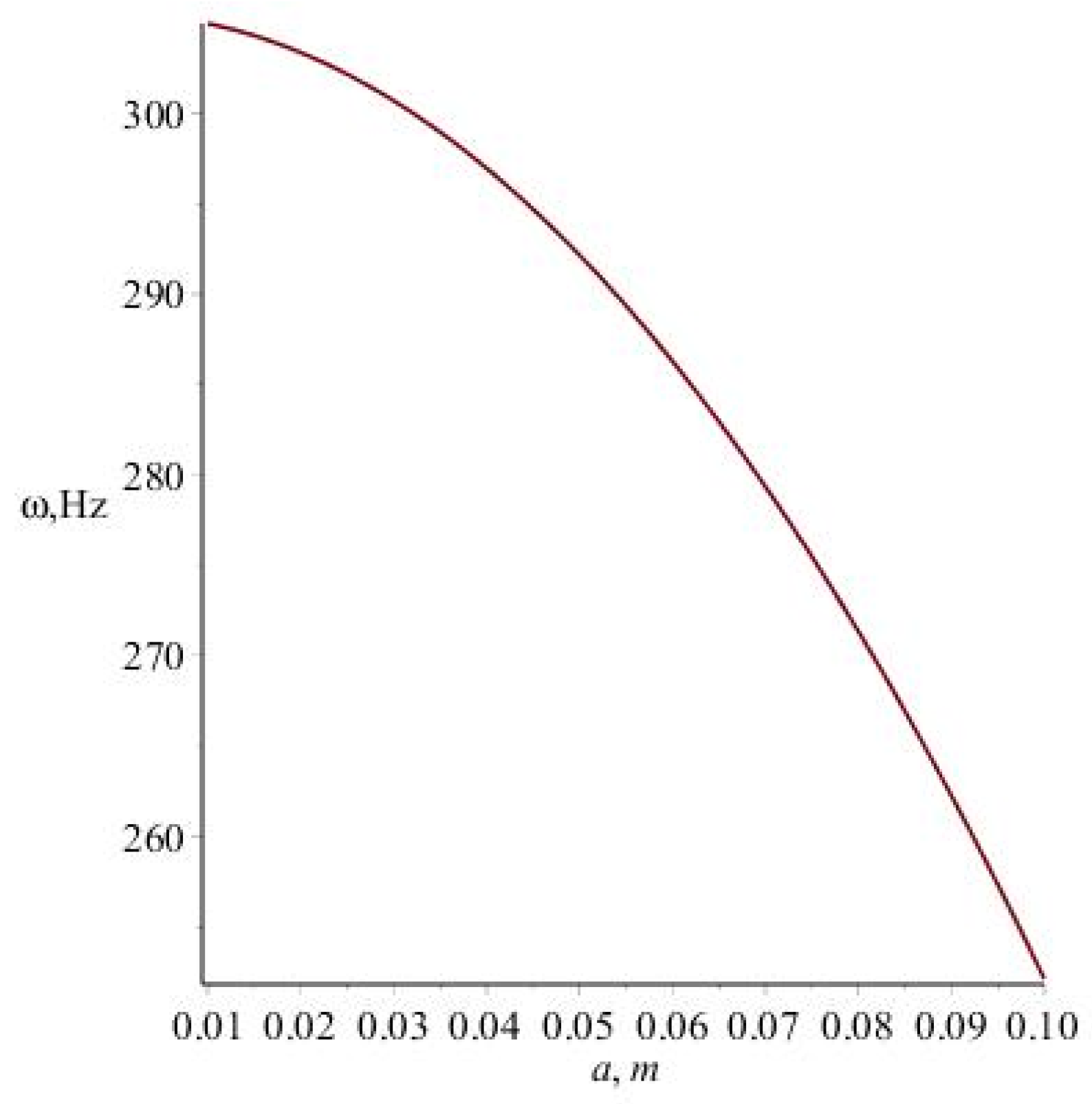
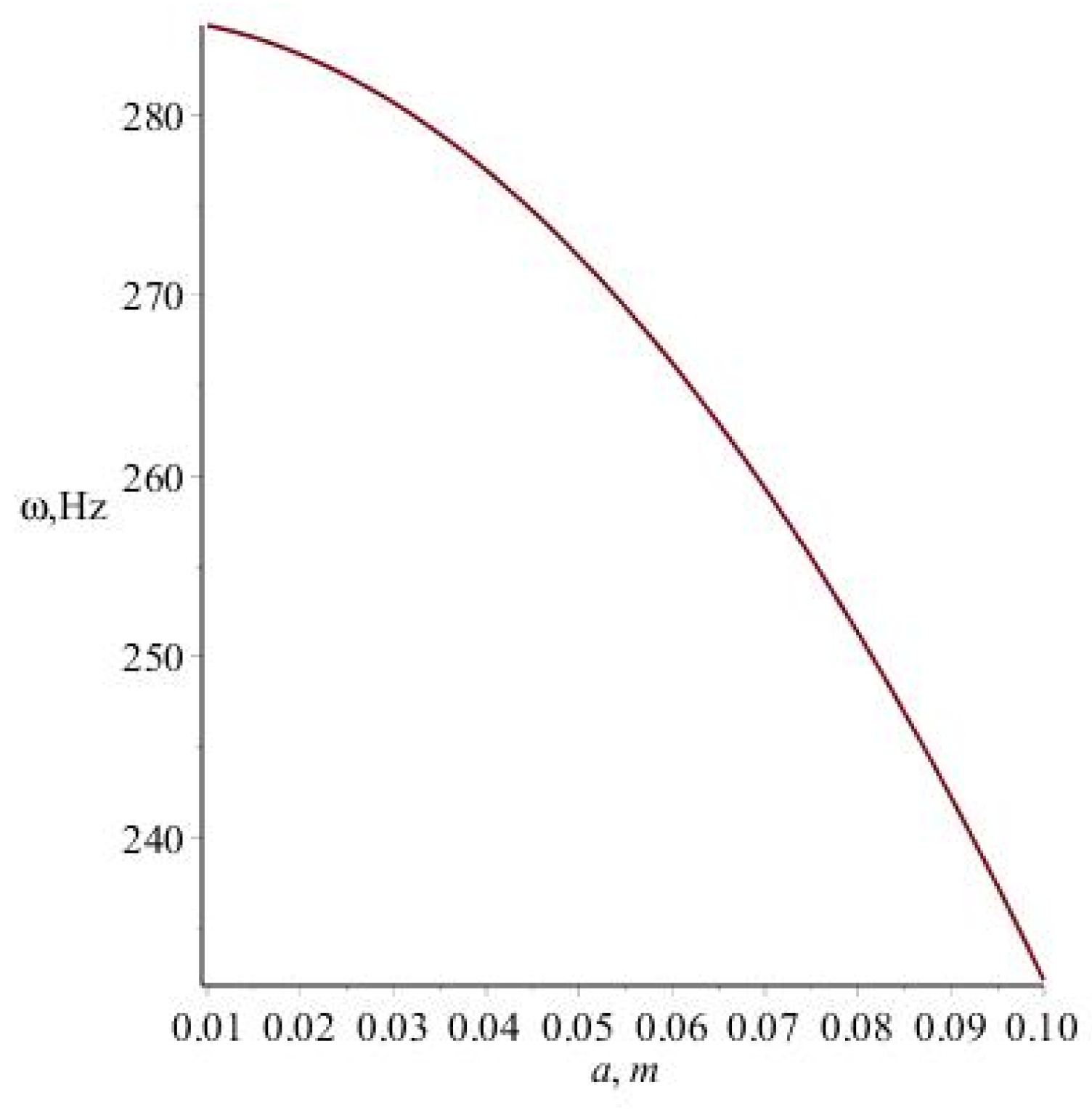
- After the graphical analysis of numerical simulations (Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6) and the corresponding equation system, it can be concluded that the speed of movement reduces the frequency of vibrations (for the non-resonant case with hinged fastening), i.e., at , the frequency of vibrations decreases almost to 2 Hz, and when the amplitude increases, the frequency decreases slightly (by 1%) according to the parabolic law, which is not as significant as when the longitudinal speed is affected.
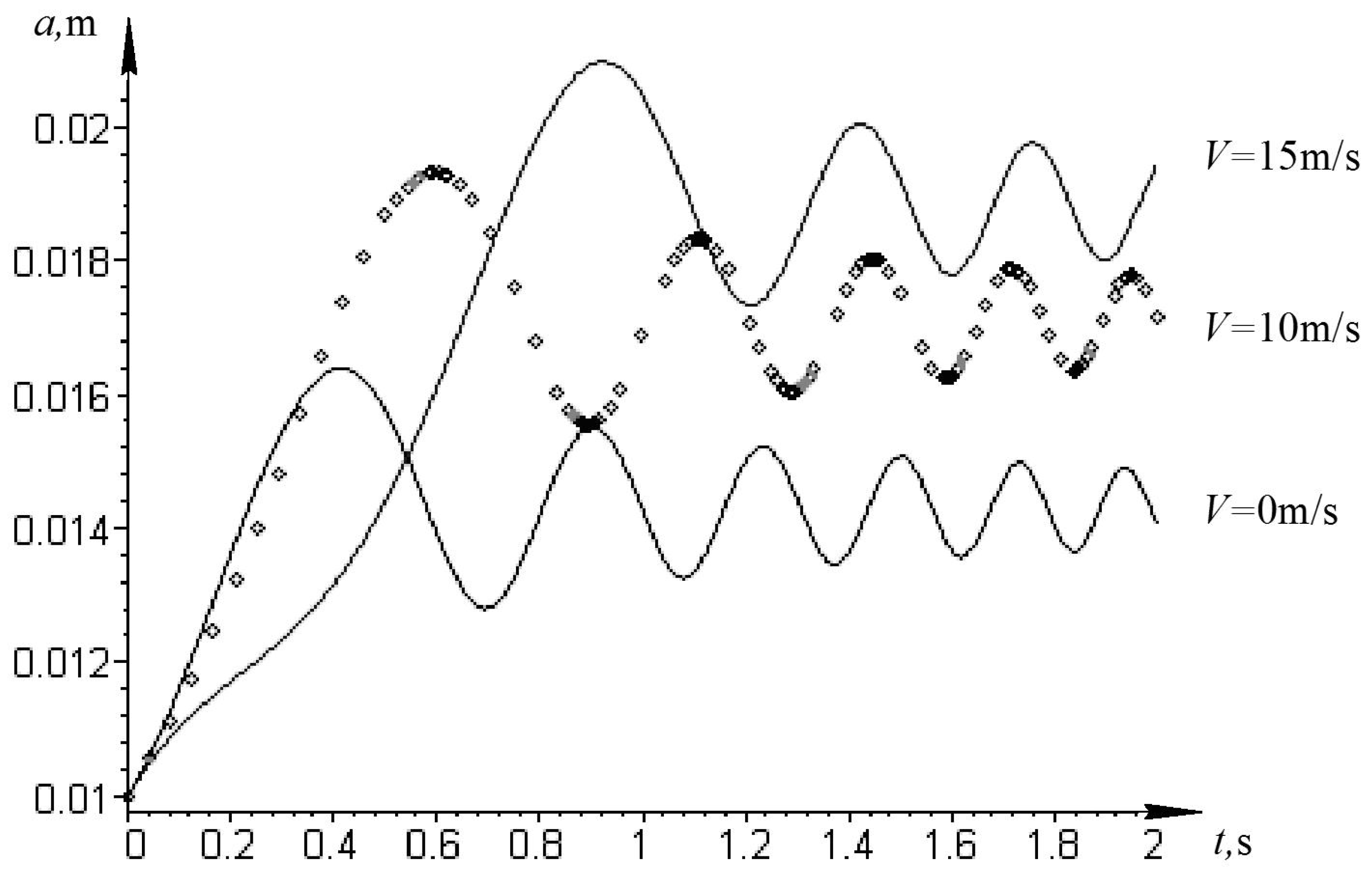
- Additionally, in the resonant case, it can be seen that an increase in the speed of medium movement leads to an increase in the amplitude. For example, at a speed of , the amplitude of vibrations of the system increases by 22%. It can also be seen that the vibration frequency of the dynamic process decreases with increasing speed.
- The amplitude of vibrations of the system remains unchanged and is equal to its initial value, if the system is conservative ( = const). The influence of speed on the change in system frequency is decreasing in nature; the higher the speed, the lower the system frequency.
- From the results of the work, as a special case, at , we obtain results that are relative to quasi-linear systems with distributed parameters that are not characterized by longitudinal motion.
- The obtained mathematical models allow design engineers to take into account the influence of the characteristics listed in the study (speed, disturbing force, physical and mechanical characteristics of the beam material) even at the stage of designing homogeneous nonlinear elastic systems. The correlations obtained in the study make it possible to research the influence of the parameters of the moving medium on the nature of changes in the frequency and amplitude of vibrations and to predict dynamic phenomena in them with the required accuracy. If properly applied in engineering calculations of industrial equipment, the obtained dependences can be used for the synthesis and optimization of the parameters of pipelines, through which a liquid medium flows, and other similar structural elements.
- Practical applications of the obtained results in the paper are as follows:
- Nonlinear transversal oscillations of the telescopic boom of a crane are studied as real phenomena. The numerical characteristics of the oscillating system considered in the paper relate to the mathematical model of the telescopic boom (CTD-KB P 3200 beam crane with two hooks). Optimization of parameters for such types of technological constructions can be predicted due to the considered procedure.
- Substitution of some physical parameters in the proposed model enables us to consider mathematical models of nonlinear oscillations for liquid pipelines as well. Optimization of parameters can be realized in the same way also.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Andronov, A.; Witt, A.A.; Khaikin, S.E. Theory of Oscillators; Addison-Wesley Publ. Company, Inc.: London, UK, 1966. [Google Scholar] [CrossRef]
- Anisimov, I.O. Oscillations and Waves; Akadempress: Kyiv, Ukraine, 2003. [Google Scholar]
- Zviaduri, V.; Chelidze, M.; Tedoshvili, M. Dynamics of Vibratory Technological Machines and Processes; Lambert Academic Publ.: Riga, Latvia, 2021. [Google Scholar]
- Kneubühl, F.K. Oscillations and Waves; Springer: Berlin, Germany, 1997. [Google Scholar] [CrossRef]
- Fidlin, A. Nonlinear Oscillations in Mechanical Engineering; Springer: Berlin, Germany, 2006. [Google Scholar] [CrossRef]
- Wagg, D.; Neild, S. Nonlinear Vibration with Control; Springer Intern. Publ.: Basel, Switzerland, 2015. [Google Scholar] [CrossRef]
- Andrukhiv, A.; Sokil, B.; Sokil, M. Resonant phenomena of elastic bodies that perform bending and torsion vibrations. Ukr. J. Mech. Eng. Mater. Sci. 2018, 4, 65–73. [Google Scholar] [CrossRef]
- Pukach, P.; Slipchuk, A.; Beregova, H.; Pukach, Y.; Hlynskyi, Y. Asymptotic Approaches to Study the Mathematical Models of Nonlinear Oscillations of Movable 1D Bodies. In Proceedings of the 2020 IEEE 15th International Conference on Computer Sciences and Information Technologies (CSIT), Zbarazh, Ukraine, 23–26 September 2020; Volume 1, pp. 141–145. [Google Scholar]
- Slipchuk, A.; Pukach, P.; Vovk, M.; Slyusarchuk, O. Advancing asymptotic approaches to studying the longitudinal and torsional oscillations of a moving beam. East.-Eur. J. Enterp. Technol. 2022, 3, 31–39. [Google Scholar] [CrossRef]
- Yurish, S.Y. Sensors and Biosensors, MEMS Technologies and Its Applications. In Advances in Sensors: Reviews; International Frequency Sensor Association Publ.: Barcelona, Spain, 2014; Volume 2. [Google Scholar]
- Sokil, B.I.; Khytriak, O.I. Vibrations of drive systems flexible elements and methods of determining their optimal nonlinear characteristics based on the laws of motion. Mil. Tech. Collect. 2009, 2, 9–12. [Google Scholar] [CrossRef]
- Mittal, P.K. Oscillations, Waves and Acoustics; I.K. International Publishing House Pvt. Ltd.: New Delhi, India, 2010. [Google Scholar]
- Firouz-Abadi, R.D.; Haddadpour, H.; Novinzadeh, A.B. An asymptotic solution to transverse free vibrations of variable-section beams. J. Sound Vib. 2007, 304, 530–540. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, W. Supercritical nonlinear transverse vibration of a hyperelastic beam under harmonic axial loading. Commun. Nonlinear Sci. Numer. Simul. 2022, 112, 106536. [Google Scholar] [CrossRef]
- Sah, S.M.; Thomsen, J.J.; Tcherniak, D. Transverse vibrations induced by longitudinal excitation in beams with geometrical and loading imperfections. J. Sound Vib. 2019, 444, 152–160. [Google Scholar] [CrossRef]
- Gritsenko, D.; Xu, J.; Paoli, R. Transverse vibrations of cantilever beams: Analytical solutions with general steady-state forcing. Appl. Eng. Sci. 2020, 3, 100017. [Google Scholar] [CrossRef]
- Cao, D.; Gao, Y.; Wang, J.; Yao, M.; Zhang, W. Analytical analysis of free vibration of non-uniform and non-homogenous beams: Asymptotic perturbation approach. Appl. Math. Model. 2018, 65, 526–534. [Google Scholar] [CrossRef]
- Lenci, S.; Rega, G. An asymptotic model for the free vibrations of a two-layer beam. Eur. J. Mech.-A/Solids 2013, 42, 441–453. [Google Scholar] [CrossRef]
- Ahmed, A.; Rhali, B. Geometrically nonlinear transverse vibrations of Bernoulli-Euler beams carrying a finite number of masses and taking into account their rotatory inertia. Procedia Eng. 2017, 199, 489–494. [Google Scholar] [CrossRef]
- Torabi, K.; Jazi, A.J.; Zafari, E. Exact closed form solution for the analysis of the transverse vibration modes of a Timoshenko beam with multiple concentrated masses. Appl. Math. Comput. 2014, 238, 342–357. [Google Scholar] [CrossRef]
- Serpilli, M.; Lenci, S. Asymptotic modelling of the linear dynamics of laminated beams. Int. J. Solids Struct. 2012, 49, 1147–1157. [Google Scholar] [CrossRef] [Green Version]
- Won, H.-I.; Chung, J. Numerical analysis for the stick-slip vibration of a transversely moving beam in contact with a frictional wall. J. Sound Vib. 2018, 419, 42–62. [Google Scholar] [CrossRef]
- Babaei, M.; Asemi, K.; Safarpour, P. Natural frequency and dynamic analyses of functionally graded saturated porous beam resting on viscoelastic foundation based on higher order beam theory. J. Solid Mech. 2019, 11, 615–634. [Google Scholar] [CrossRef]
- Lv, H.; Li, Y.; Li, L.; Liu, Q. Transverse vibration of viscoelastic sandwich beam with time-dependent axial tension and axially varying moving velocity. Appl. Math. Model. 2014, 38, 2558–2585. [Google Scholar] [CrossRef]
- Qaderi, S.; Ebrahimi, F.; Vinyas, M. Dynamic analysis of multi-layered composite beams reinforced with graphene platelets resting on two-parameter viscoelastic foundation. Eur. Phys. J. Plus 2019, 134, 1–11. [Google Scholar] [CrossRef]
- Vîlcu, R.; Bala, D. Particularities of some proposed models for the characterization of chemical oscillations. Model. Oscil. Chem. React. 2004, 277–286. [Google Scholar]
- Shesha Prakash, M.N.; Suresh, G.S. Textbook of Mechanics of Materials; PHI Learning Private Limited: New Delhi, India, 2011. [Google Scholar]
- Bogolyubov, N.N.; Mitropolsky, Yu.A. Asymptotic Methods in the Theory of Non-Linear Oscillations; Hindustan Publ. Corp.: New Delhi, India, 1961. [Google Scholar]
- Tsmots, I.; Rabyk, V.; Kryvinska, N.; Yatsymirskyy, M.; Teslyuk, V. Design of the Processors for Fast Cosine and Sine Fourier Transforms. Circuits Syst. Signal Process. 2022, 1–24. [Google Scholar] [CrossRef]
- Davis, H.F. Fourier Series and Orthogonal Functions; Dover Publications, Inc.: New York, NY, USA, 2012. [Google Scholar]
- Fetter, A.L.; Walecka, J.D. Nonlinear Mechanics; Dover Publications, Inc.: New York, NY, USA, 2006. [Google Scholar]
- Sharma, A.K. Textbook of Differential Equations; Discovery Publishing House: New Delhi, India, 2010. [Google Scholar]
- Dronyuk, I.; Fedevych, O.; Kryvinska, N. Constructing of Digital Watermark Based on Generalized Fourier Transform. Electronics 2020, 9, 1108. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beam’s Length, m | Natural Frequency, Hz | Beam’s Oscillation Frequency, Hz | |||
|---|---|---|---|---|---|
| at Velocity m/s | at Velocity m/s | at Velocity m/s | at Velocity m/s | ||
| 1 | 1231 | 1182.419 | 1212.454 | 1219.963 | 1222.466 |
| 2 | 307.75 | 267.1695 | 297.2048 | 304.7137 | 307.2166 |
| 3 | 136.7778 | 96.6253 | 126.6606 | 134.1695 | 136.6724 |
| 4 | 76.9375 | 36.85705 | 66.89239 | 74.40122 | 76.90416 |
| 5 | 49.24 | 9.1723 | 39.21457 | 46.7234 | 49.22635 |
| Oscillation Amplitude a, m | Beam’s Oscillation Frequency, Hz | |||
|---|---|---|---|---|
| at Velocity m/s | at Velocity m/s | at Velocity m/s | at Velocity m/s | |
| 0.01 | 267.451 | 297.462 | 304.965 | 307.466 |
| 0.02 | 265.850 | 295.861 | 303.3639 | 305.864 |
| 0.03 | 263.181 | 293.192 | 300.694 | 303.195 |
| 0.04 | 259.444 | 289.455 | 296.958 | 299.459 |
| 0.05 | 254.640 | 284.651 | 292.154 | 294.654 |
| 0.06 | 248.768 | 278.779 | 286.282 | 288.783 |
| 0.07 | 241.8289 | 271.8399 | 279.3426 | 281.8436 |
| 0.08 | 233.821 | 263.832 | 271.335 | 273.836 |
| 0.09 | 224.747 | 254.758 | 262.260 | 264.761 |
| 0.1 | 214.604 | 244.615 | 252.118 | 254.619 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Slipchuk, A.; Pukach, P.; Vovk, M. Asymptotic Study of Longitudinal Velocity Influence and Nonlinear Elastic Characteristics of the Oscillating Moving Beam. Mathematics 2023, 11, 322. https://doi.org/10.3390/math11020322
Slipchuk A, Pukach P, Vovk M. Asymptotic Study of Longitudinal Velocity Influence and Nonlinear Elastic Characteristics of the Oscillating Moving Beam. Mathematics. 2023; 11(2):322. https://doi.org/10.3390/math11020322
Chicago/Turabian StyleSlipchuk, Andrii, Petro Pukach, and Myroslava Vovk. 2023. "Asymptotic Study of Longitudinal Velocity Influence and Nonlinear Elastic Characteristics of the Oscillating Moving Beam" Mathematics 11, no. 2: 322. https://doi.org/10.3390/math11020322