

Fixed/Preassigned-Time Stochastic Synchronization of Complex-Valued Fuzzy Neural Networks with Time Delay


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation and Preliminary Description
- (i)
- ,
- (ii)
- ,
- (i)
- If and , then ,
- (ii)
- If , or , then ,
- (iii)
- If and , then .
- (1)
- ,
- (2)
- ,
- (3)
- .
3. Main Results
3.1. FXT Synchronization
3.2. PAT Synchronization
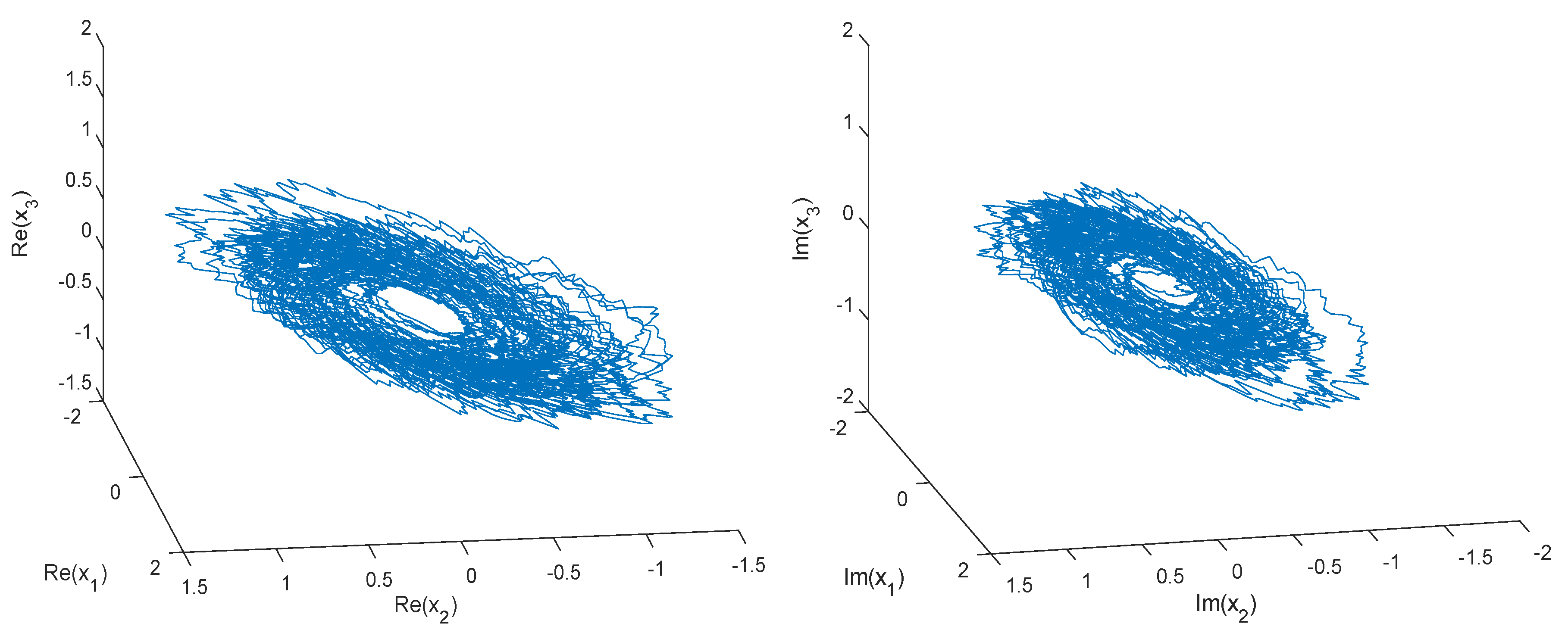
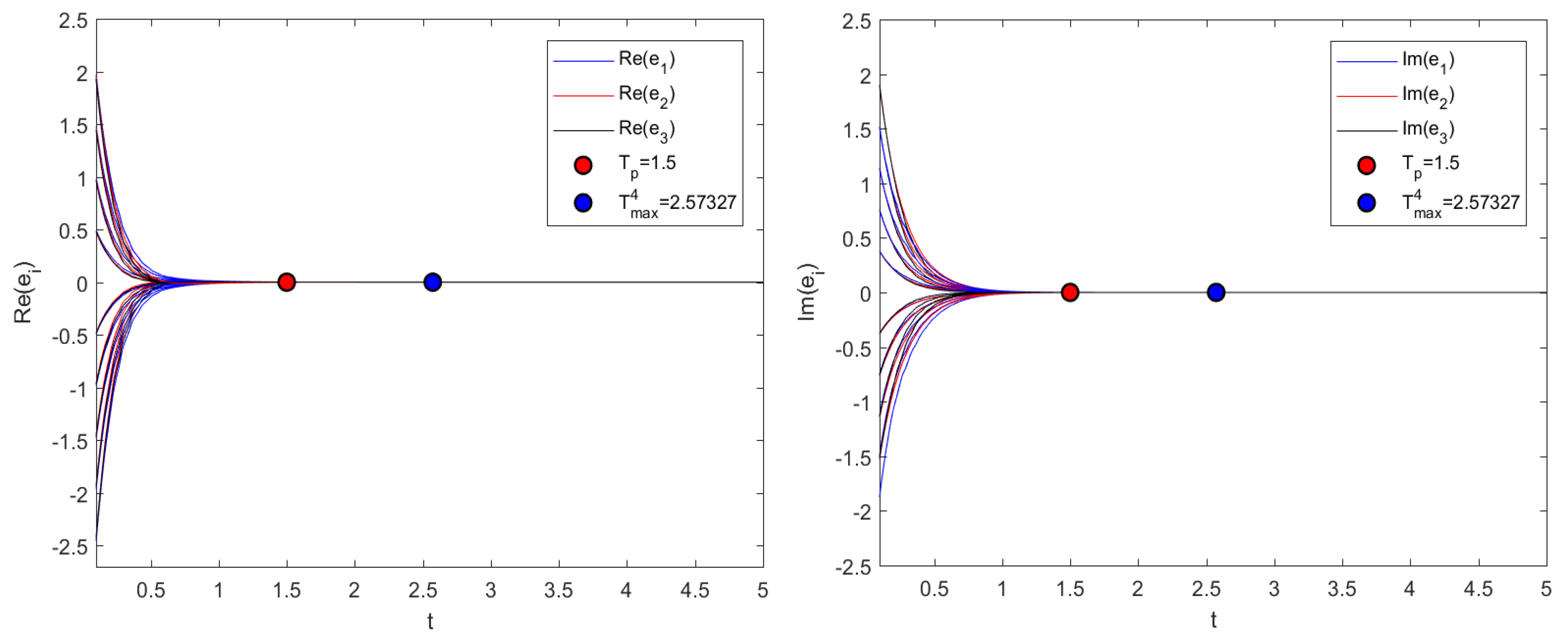
4. Numerical Results
5. Conclusions and Prospect
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Chua, L.; Yang, L. Cellular Neural Networks: Theory. IEEE Trans. Circuits Syst. 1988, 35, 1257–1272. [Google Scholar] [CrossRef]
- Chua, L.; Yang, L. Cellular Neural Networks: Applications. IEEE Trans. Circuits Syst. 1988, 35, 1273–1290. [Google Scholar] [CrossRef]
- Klaus, M. Cellular neural networks and visual computing. Int. J. Bifurc. Chaos 2003, 13, 1–6. [Google Scholar]
- Duan, S.; Hu, X.; Wang, L.; Gao, S.; Li, C. Hybrid memristor/RTD structure-based cellular neural networks with applications in image processing. Neural Comput. Appl. 2013, 25, 291–296. [Google Scholar] [CrossRef]
- Yang, T.; Yang, L.; Wan, C.; Chua, L. Fuzzy Cellular Neural Networks: Theory. In Proceeding of the 1996 Fourth IEEE international workshop on cellular neural networks and their applications proceedings (CNNA-96), Seville, Spain, 24–26 June 1996; IEEE: Piscataway, NJ, USA, 1996; pp. 181–186. [Google Scholar]
- Yao, X.; Liu, X.; Zhong, S. Exponential stability and synchronization of Memristor-based fractional-order fuzzy cellular neural networks with multiple delays. Neurocomputing 2021, 419, 239–250. [Google Scholar] [CrossRef]
- Muhammadhaji, A.; Abdurahman, A. General decay synchronization for fuzzy cellular neural networks with time-varying delays. Int. J. Nonlinear Sci. Numer. Simul. 2019, 20, 551–560. [Google Scholar] [CrossRef]
- Haider, K.; Ahmed, A. Fuzzy-cellular neural network for face recognition HCI Authentication. J. Phys. Conf. Ser. 2018, 1003, 012033. [Google Scholar]
- Gang, Y. New results on the stability of fuzzy cellular neural networks with time-varying leakage delays. Neural Comput. Appl. 2014, 25, 1709–1715. [Google Scholar]
- Ceylan, M.; Ceylan, R.; Kara, S. Application of complex discrete wavelet transform in classification of Doppler signals using complex-valued artificial neural network. Artif. Intell. Med. 2008, 44, 65–76. [Google Scholar] [CrossRef]
- Valle, M. Complex-valued recurrent correlation neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2014, 23, 1600–1612. [Google Scholar] [CrossRef]
- Pande, A.; Thakur, A.K.; Roy, S. Complex-Valued Neural Network in Signal Processing: A Study on the Effectiveness of Complex Valued Generalized Mean Neuron Model. Proc. World Acad. Sci. Eng. Technol. 2008, 27, 240–245. [Google Scholar]
- Hirose, A. Complex-Valued Neural Networks: Advances and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Guo, Y.; Luo, Y.; Wang, W.; Luo, X.; Ge, C.; Kurths, J.; Yuan, M.; Gao, Y. Fixed-time synchronization of complex-valued memristive BAM neural network and applications in image encryption and decryption. Int. J. Control Autom. Syst. 2019, 18, 462–476. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, R.; Liu, X.; Zhong, M.; Lin, C.; Chen, B. Fixed-time synchronization for complex-valued BAM neural networks with time delays. Asian J. Control 2019, 23, 298–314. [Google Scholar] [CrossRef]
- Feng, L.; Yu, J.; Hu, C.; Yang, C.; Jiang, H. Nonseparation method-based finite/fixed-time synchronization of fully complex-valued discontinuous neural networks. IEEE Trans. Cybern. 2021, 51, 3212–3223. [Google Scholar] [CrossRef]
- Xiong, K.; Yu, J.; Hu, C.; Jiang, H. Synchronization in finite/fixed time of fully complex-valued dynamical networks via nonseparation approach. J. Frankl. Inst. 2020, 357, 473–493. [Google Scholar] [CrossRef]
- Shirke, D.; Raja, C. Optimization driven deep belief network using chronological monarch butterfly optimization for iris recognition at-a-distance. Int. J. Knowl.-Based Intell. Eng. Syst. 2022, 26, 17–35. [Google Scholar] [CrossRef]
- Ramezanpanah, Z.; Mallem, M.; Davesne, F. Autonomous gesture recognition using multi-layer LSTM networks and laban movement analysis. Int. J. Knowl.-Based Intell. Eng. Syst. 2023, 26, 1–9. [Google Scholar] [CrossRef]
- Giebel, S.; Rainer, M. Stochastic processes adapted by neural networks with application to climate, energy, and finance. Appl. Math. Comput. 2011, 218, 1003–1007. [Google Scholar] [CrossRef]
- Shi, Y.; Zhu, P. Finite-time synchronization of stochastic memristor-based delayed neural networks. Neural Comput. Appl. 2016, 29, 293–301. [Google Scholar] [CrossRef]
- Liu, M.; Wu, H. Stochastic finite-time synchronization for discontinuous semi-Markovian switching neural networks with time delays and noise disturbance. Neurocomputing 2018, 310, 246–264. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, X.; Li, C. Fixed-time stochastic synchronization of complex networks via continuous control. IEEE Trans. Cybern. 2019, 49, 3099–3104. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Wu, X.; Mao, B.; Lu, J.; Xie, C. Fixed-time synchronization in the pth moment for time-varying delay stochastic multilayer networks. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1135–1144. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, C. Exponential Synchronization of Memristor-Based Competitive Neural Networks With Reaction-Diffusions and Infinite Distributed Delays. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; He, H.; Zeng, Z. Global Synchronization of Fuzzy Memristive Neural Networks with Discrete and Distributed Delays. IEEE Trans. Fuzzy Syst. 2019, 28, 2022–2034. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.; Yu, J.; Jiang, H.; Wen, S. Fixed-time Synchronization of Coupled Memristive Complex-valued Neural Networks. Chaos Solitons Fractals 2021, 148, 110993. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Z.; Lin, C.; Chen, J. Fixed-time synchronization for complex-valued BAM neural networks with time-varying delays via pinning control and adaptive pinning control. Chaos Solitons Fractals 2021, 153, 111583. [Google Scholar] [CrossRef]
- Hu, C.; He, H.; Jiang, H. Fixed/Preassigned-Time Synchronization of Complex Networks via Improving Fixed-Time Stability. IEEE Trans. Cybern. 2020, 51, 2882–2892. [Google Scholar] [CrossRef]
- You, J.; Abdurahman, A.; Sadik, H. Fixed/predefined-time synchronization of complex-valued stochastic BAM neural networks with stabilizing and destabilizing impulse. Mathematics 2022, 10, 4384. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Fang, J.; Li, H. Event-triggered exponential synchronization for complex-valued memristive neural networks with time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4104–4116. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy Sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Cui, W.; Wang, Z.; Jin, W. Fixed-time synchronization of Markovian jump fuzzy cellular neural networks with stochastic disturbance and time-varying delays. Fuzzy Sets Syst. 2021, 411, 68–84. [Google Scholar] [CrossRef]
- Abudusaimaiti, M.; Abdurahman, A.; Jiang, H.; Hu, C. Fixed/predefined-time synchronization of fuzzy neural networks with stochastic perturbations. Chaos Solitons Fractals 2022, 154, 111596. [Google Scholar] [CrossRef]
- Chen, S.; Li, H.; Kao, Y.; Zhang, L.; Hu, C. Finite-time stabilization of fractional-order fuzzy quaternion-valued BAM neural networks via direct quaternion approach. J. Frankl. Inst. 2021, 358, 7650–7673. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhuang, J.; Xia, Y.; Bai, Y.; Cao, J.; Gu, L. Fixed-time synchronization of the impulsive memristor-based neural networks. Commun. Nonlinear Sci. Numer. Simul. 2019, 77, 40–53. [Google Scholar] [CrossRef]
- Akyol, K. Comparing of deep neural networks and extreme learning machines based on growing and pruning approach. Expert Syst. Appl. 2020, 140, 112875. [Google Scholar] [CrossRef]
- Deng, H.; Bao, H. Fixed-time synchronization of quaternion-valued neural networks. Phys. A Stat. Mech. Its Appl. 2019, 527, 121351. [Google Scholar] [CrossRef]
- Zhang, J.; Ma, X.; Li, Y.; Gan, Q.; Wang, C. Synchronization in fixed/preassigned-time of delayed fully quaternion-valued memristive neural networks via non-separation method. Commun. Nonlinear Sci. Numer. Simul. 2022, 113, 106581. [Google Scholar] [CrossRef]
- Pang, M.; Zhang, Z.; Wang, X.; Wang, Z.; Lin, C. Fixed/preassigned-time synchronization of high-dimension-valued fuzzy neural networks with time-varying delays via nonseparation approach. Knowl.-Based Syst. 2022, 255, 109774. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abudusaimaiti, M.; Abudukeremu, A.; Sabir, A. Fixed/Preassigned-Time Stochastic Synchronization of Complex-Valued Fuzzy Neural Networks with Time Delay. Mathematics 2023, 11, 3769. https://doi.org/10.3390/math11173769
Abudusaimaiti M, Abudukeremu A, Sabir A. Fixed/Preassigned-Time Stochastic Synchronization of Complex-Valued Fuzzy Neural Networks with Time Delay. Mathematics. 2023; 11(17):3769. https://doi.org/10.3390/math11173769
Chicago/Turabian StyleAbudusaimaiti, Mairemunisa, Abuduwali Abudukeremu, and Amina Sabir. 2023. "Fixed/Preassigned-Time Stochastic Synchronization of Complex-Valued Fuzzy Neural Networks with Time Delay" Mathematics 11, no. 17: 3769. https://doi.org/10.3390/math11173769