
Painlevé Test, Phase Plane Analysis and Analytical Solutions of the Chavy–Waddy–Kolokolnikov Model for the Description of Bacterial Colonies

Abstract
:1. Introduction
2. Painlevé Test for the Reduced Chavy–Waddy–Kolokolnikov Model
3. Painlevé Test for the Nonlinear Ordinary Differential Equation of the Second Order
4. First Integral of the Nonlinear Ordinary Differential Equation Corresponding to the Chavy–Waddy–Kolokolnikov Model
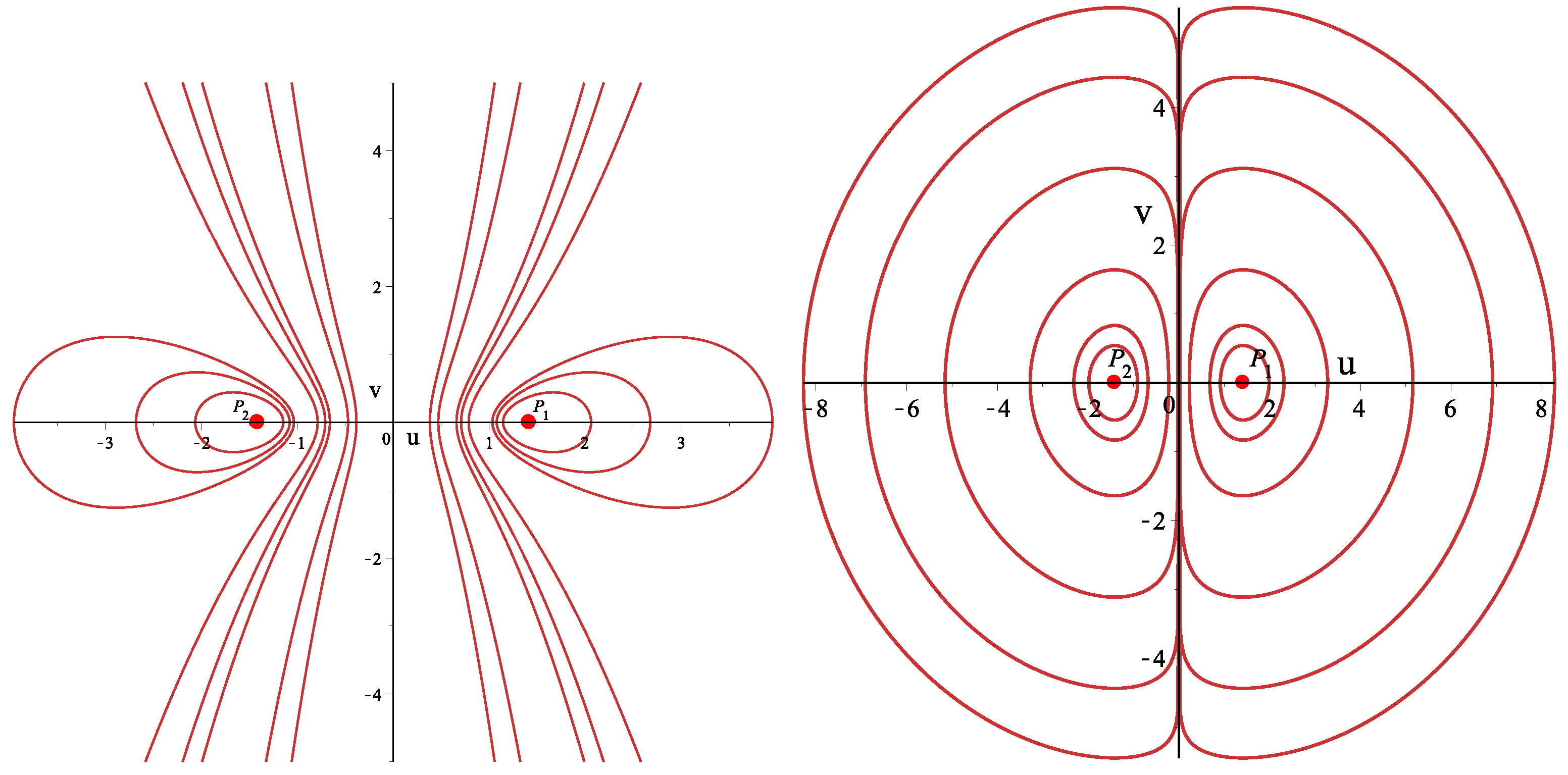
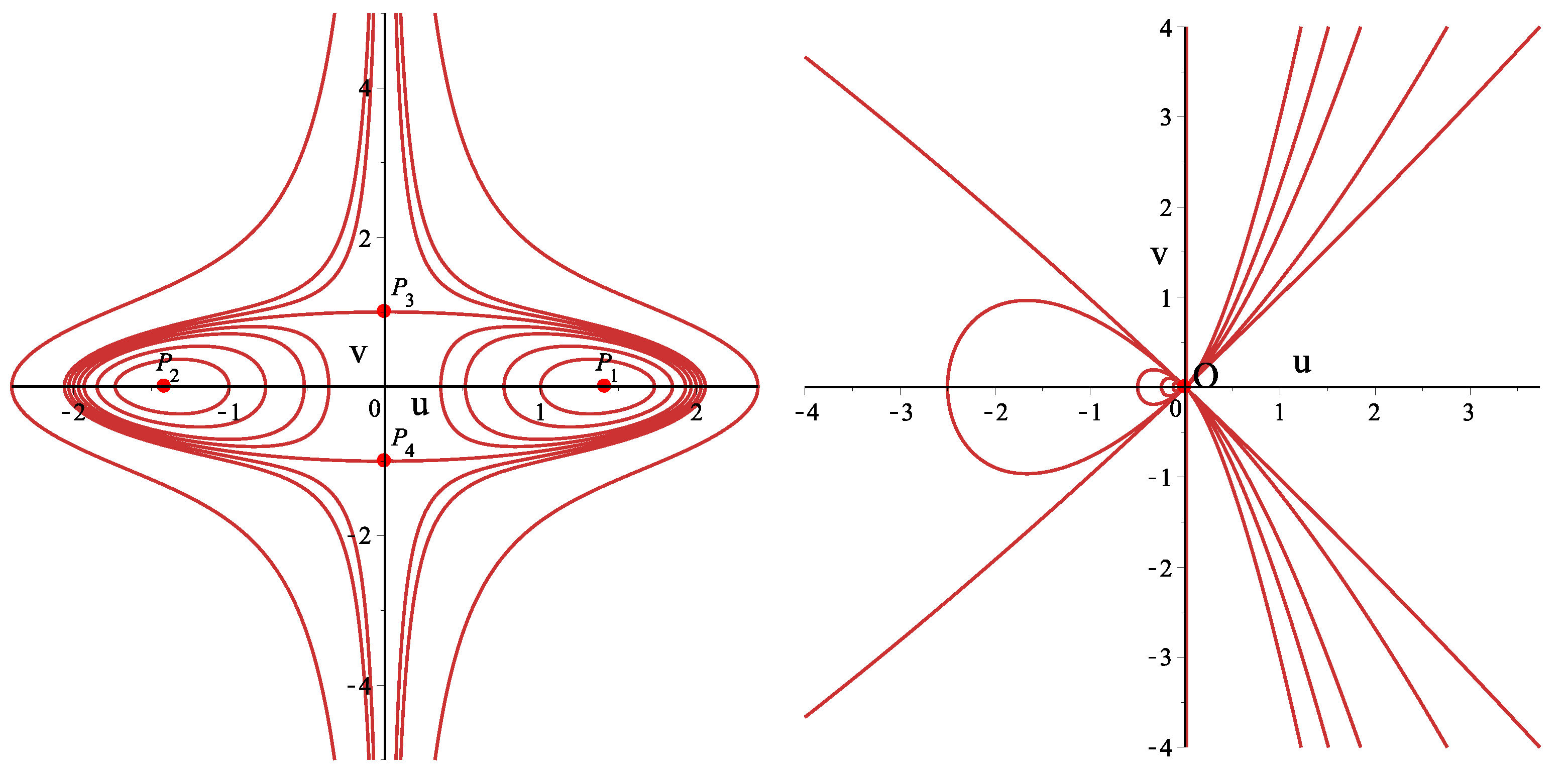
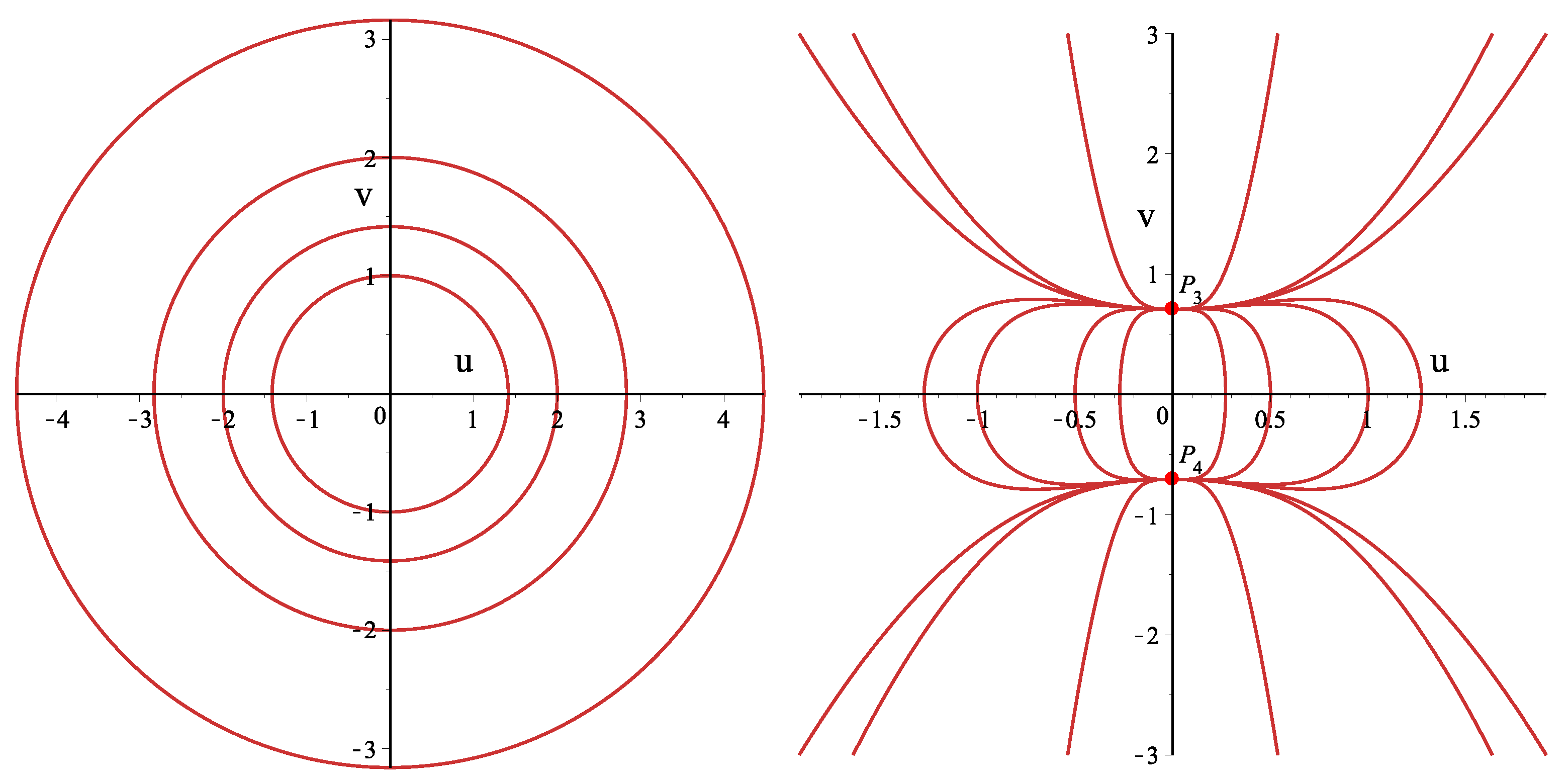
5. Phase-Plane Analysis of the Nonlinear Ordinary Differential Equations Corresponding to the Chavy–Waddy–Kolokolnikov Model
- When and , the nodes vanish, and system (22) does not have any equilibrium points.
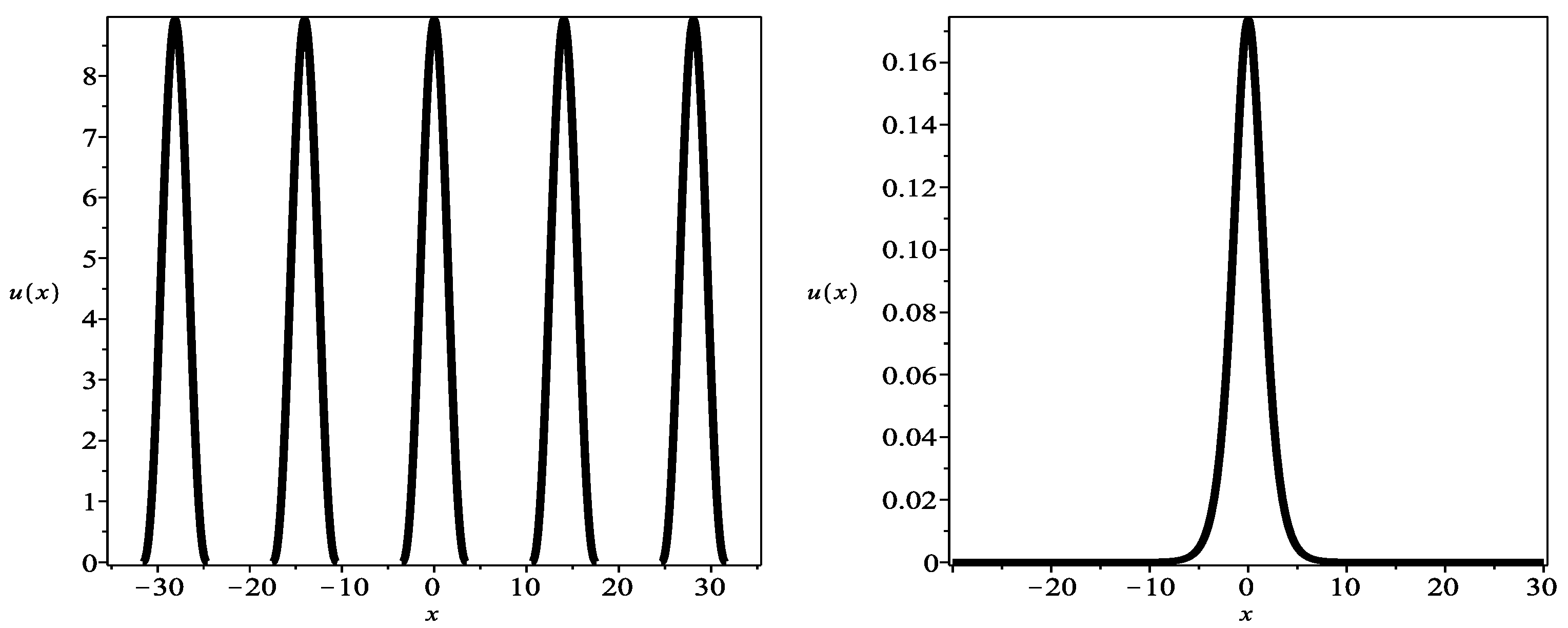
6. Stationary Solutions of the Chavy–Waddy–Kolokolnikov Model
7. Application of the Simplest Equation Method for Finding Exact Solutions of the Chavy–Waddy–Kolokolnikov Model
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Keller, E.F.; Segel, L.A. Traveling bands of chemotactic bacteria: A theoretical analysis. J. Theor. Biol. 1971, 30, 235–248. [Google Scholar] [CrossRef] [PubMed]
- Keller, E.F.; Segel, L.A. Model for chemotaxis. J. Theor. Biol. 1971, 30, 225–234. [Google Scholar] [CrossRef] [PubMed]
- Keller, E.F.; Segel, L.A. Initiation of slime mold aggregation viewed as an instability. J. Theor. Biol. 1970, 26, 399–415. [Google Scholar] [CrossRef]
- Liu, P.; Shi, J.; Wang, Z.-A. Pattern formation of the attraction-repulsion Keller-Segel system. Discret. Contin. Dyn. Syst.-B 2013, 18, 2597. [Google Scholar] [CrossRef]
- Winkler, M. Finite-time blow-up in the higher-dimensional parabolic–parabolic Keller-Segel system. J. Math. Pures Appl. 2013, 100, 748–767. [Google Scholar] [CrossRef]
- Arumugam, G.; Tyagi, J. Keller-Segel chemotaxis models: A review. Acta Appl. Math. 2021, 171, 6. [Google Scholar] [CrossRef]
- Horstmann, D. From 1970 until Present: The Keller-Segel Model in Chemotaxis and Its Consequences. Jahresberichte DMV 2003, 105, 103–165. [Google Scholar]
- Wang, Z.; Thomas, H. Classical solutions and pattern formation for a volume filling chemotaxis model. Chaos Interdiscip. J. Nonlinear Sci. 2007, 17, 037108. [Google Scholar] [CrossRef]
- Iglesias, P.A.; Devreotes, P.N. Navigating through models of chemotaxis. Curr. Opin. Cell Biol. 2008, 20, 35–40. [Google Scholar] [CrossRef]
- Burkart, U.; Häder, D.P. Phototactic attraction in light trap experiments: A mathematical model. J. Math. Biol. 1980, 10, 257–269. [Google Scholar] [CrossRef]
- Marée, A.F.M.; Panfilov, A.V.; Hogeweg, P. Phototaxis during the slug stage of Dictyostelium discoideum: A model study. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1999, 266, 1351–1360. [Google Scholar] [CrossRef]
- Bhaya, D.; Levy, D.; Requeijo, T. Group dynamics of phototaxis: Interacting stochastic many-particle systems and their continuum limit. In Hyperbolic Problems: Theory, Numerics, Applications; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Levy, D.; Requeijo, T. Stochastic models for phototaxis. Bull. Math. Biol. 2008, 70, 1684–1706. [Google Scholar] [CrossRef]
- Levy, D.; Requeijo, T. Modeling group dynamics of phototaxis: From particle systems to PDEs. Discret. Contin. Dyn. Syst. Ser. B 2008, 9, 103. [Google Scholar] [CrossRef]
- Galante, A.; Levy, D. Modeling selective local interactions with memory. Phys. D Nonlinear Phenom. 2013, 260, 176–190. [Google Scholar] [CrossRef] [Green Version]
- Weinberg, D.; Levy, D. Modeling selective local interactions with memory: Motion on a 2D lattice. Phys. D Nonlinear Phenom. 2014, 278, 13–30. [Google Scholar] [CrossRef] [Green Version]
- Bhaya, D. Light matters: Phototaxis and signal transduction in unicellular cyanobacteria. Mol. Microbiol. 2004, 53, 745–754. [Google Scholar] [CrossRef] [PubMed]
- Burriesci, M.; Bhaya, D. Tracking phototactic responses and modeling motility of Synechocystis sp. strain PCC6803. J. Photochem. Photobiol. B Biol. 2008, 91, 77–86. [Google Scholar] [CrossRef]
- Samuel, S.; Gill, V. Diffusion-chemotaxis model of effects of cortisol on immune response to human immunodeficiency virus. Nonlinear Eng. 2018, 7, 207–227. [Google Scholar] [CrossRef]
- Chaplain, M.A.J.; Lolas, G. Mathematical modelling of cancer cell invasion of tissue: The role of the urokinase plasminogen activation system. Math. Models Methods Appl. Sci. 2005, 15, 1685–1734. [Google Scholar] [CrossRef] [Green Version]
- Chaplain, M.A.J.; Lolas, G. Mathematical modelling of cancer invasion of tissue: Dynamic heterogeneity. Netw. Heterog. Media 2006, 1, 399–439. [Google Scholar] [CrossRef]
- Faraz, N.; Khan, Y.; Goufo, E.D.; Anjum, A.; Anjum, A. Dynamic analysis of the mathematical model of COVID-19 with demographic effects. Z. Naturforschung C 2020, 75, 389–396. [Google Scholar] [CrossRef] [PubMed]
- Ayers, K.L.; Eggers, S.; Rollo, B.N.; Smith, K.R.; Davidson, N.M.; Siddall, N.A.; Zhao, L.; Bowles, J.; Weiss, K.; Zanni, G.; et al. Variants in SART3 cause a spliceosomopathy characterised by failure of testis development and neuronal defects. Nat. Commun. 2023, 14, 3403. [Google Scholar] [CrossRef] [PubMed]
- Ooka, H.; Ishii, T.; Hashimoto, K.; Nakamura, R. Light-induced cell aggregation of Euglena gracilis towards economically feasible biofuel production. RSC Adv. 2014, 4, 20693–20698. [Google Scholar] [CrossRef]
- Itoh, A. Euglena Motion Control by Local Illumination. In Bio-Mechanisms of Swimming and Flying; Springer: Tokyo, Japan, 2004. [Google Scholar]
- Itoh, A.; Tamura, W. Object manipulation by a formation-controlled Euglena group. In Bio-Mechanisms of Swimming and Flying: Fluid Dynamics, Biomimetic Robots, and Sports Science; Springer: Tokyo, Japan, 2008. [Google Scholar]
- Chavy-Waddy, P.-C.; Kolokolnikov, T. A local PDE model of aggregation formation in bacterial colonies. Nonlinearity 2016, 29, 3174–3185. [Google Scholar] [CrossRef] [Green Version]
- Leon-Ramírez, A.; Gonzalez-Gaxiola, O.; Chacon-Acosta, G. Analytical Solutions to the Chavy-Waddy-Kolokolnikov Model of Bacterial Aggregates in Phototaxis by Three Integration Schemes. Mathematics 2023, 11, 2352. [Google Scholar] [CrossRef]
- Painlevé, P. Sur les equations differentielles du second ordre et d’ordre superieur dont l’integrale generale est uniforme. Acta Math. 1902, 25, 1–85. [Google Scholar] [CrossRef]
- Gambier, B. Sur les équations différetielles dont l’integrate générale est uniforme. C. R. Acad. Sc. Paris 1906, 142, 1403–1406+1497–1500. [Google Scholar]
- Ince, E.L. Ordinary Differential Equations; Dover Publishing, Inc.: New York, NY, USA, 1956. [Google Scholar]
- Ablowitz, M.J.; Ramani, A.; Segur, H. Nonlinear evolution equations and ordinary differential equations of Painlevé type. Lett. Nuovo C. 1978, 23, 333–338. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Ramani, A.; Segur, H. A connection between nonlinear evolution equations and ordinary differential equations of P-type. I. J. Math. Phys. 1979, 21, 715–721. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Ramani, A.; Segur, H. A connection between nonlinear evolution equations and ordinary differential equations of P-type. II. J. Math. Phys. 1979, 21, 1006–1015. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Painlevé analysis and exact solutions of the Korteweg-de Vries equation with a source. Appl. Math. Lett. 2015, 41, 41–45. [Google Scholar] [CrossRef]
- Kudryashov, N.A. The generalized Duffing oscillator. Commun. Nonlinear Sci. Numer. Simul. 2021, 93, 105526. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Exact solutions of the equation for surface waves in a convecting fluid. Appl. Math. Comput. 2019, 344–345, 97–106. [Google Scholar] [CrossRef]
- Davis, H.T. Introduction to Nonlinear Differential and Integral Equations; US Atomic Energy Commission: Washington, DC, USA, 1960.
- Kudryashov, N.A. Exact solutions of the complex Ginzburg-Landau equation with law of four powers of nonlinearity. Optik 2022, 265, 169548. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Method for finding highly dispersive optical solitons of nonlinear differential equations. Optik 2020, 206, 163550. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Mathematical model of propagation pulse in optical fiber with power nonlinearities. Optik 2020, 212, 164750. [Google Scholar] [CrossRef]
- Kudryashov, N.A. One method for finding exact solutions of nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 2248–2253. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Guanrong, C. On a class of singular nonlinear traveling wave equations. Int. J. Bifurc. Chaos 2007, 17, 4049–4065. [Google Scholar] [CrossRef]
- Jacobi, C.G.J. Jacobi: Fundamenta Nova Theoriae Functionum Ellipticarum; Bornträger: Kenigsberg, Russia, 1829. [Google Scholar]
- Kudryashov, N.A. Solitary wave solutions of hierarchy with non-local nonlinearity. Appl. Math. Lett. 2020, 103, 106155. [Google Scholar] [CrossRef]
- Whittaker, E.T.; Watson, G.N. A Course of Modern Analysis; Cambridge University Press: Cambridge, UK, 1927. [Google Scholar]
- Kudryashov, N.A. A generalized model for description of propagation pulses in optical fiber. Optik 2019, 189, 42–52. [Google Scholar] [CrossRef]
- Akhiezer, N.I. Elements of the Theory of Elliptic Functions; AMS: Providence, RI, USA, 1990; Volume 79, ISBN 0-8218-4532-2. [Google Scholar]
- Kudryashov, N.A. Implicit solitary waves for one of the generalized nonlinear Schrödinger equations. Mathematics 2021, 9, 3024. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Optical solitons of the generalized nonlinear Schrödinger equation with Kerr nonlinearity and dispersion of unrestricted order. Mathematics 2022, 10, 3409. [Google Scholar] [CrossRef]
- Akbulut, A. Obtaining the Soliton Type Solutions of the Conformable Time-Fractional Complex Ginzburg-Landau Equation with Kerr Law Nonlinearity by Using Two Kinds of Kudryashov Methods. J. Math. 2023, 2023, 4741219. [Google Scholar] [CrossRef]
- Onder, I.; Secer, A.; Bayram, M. Optical soliton solutions of time-fractional coupled nonlinear Schrodinger system via Kudryashov-based methods. Optik 2023, 272, 170362. [Google Scholar] [CrossRef]
- Cakicioglu, H.; Ozisik, M.; Secer, A.; Bayram, M. Optical soliton solutions of Schrodinger-Hirota equation with parabolic law nonlinearity via generalized Kudryashov algorithm. Opt. Quantum Electron. 2023, 55, 407. [Google Scholar] [CrossRef]
- Albayrak, P. Optical solitons of Biswas-Milovic model having spatio-temporal dispersion and parabolic law via a couple of Kudryashov’s schemes. Optik 2023, 279, 170761. [Google Scholar] [CrossRef]
- Cinar, M.; Secer, A.; Ozisik, M.; Bayram, M. Optical soliton solutions of (1 + 1)-and (2 + 1)-dimensional generalized Sasa-Satsuma equations using new Kudryashov method. Int. J. Geom. Methods Mod. Phys. 2023, 20, 2350034. [Google Scholar] [CrossRef]
- Ozisik, M.; Secer, A.; Bayram, M. On the investigation of chiral solitons via modified new Kudryashov method. Int. J. Geom. Methods Mod. Phys. 2023, 17, 23501. [Google Scholar] [CrossRef]
- Malik, S.; Hashemi, M.S.; Kumar, S.; Rezazadeh, H.; Mahmoud, W.; Osman, M.S. Application of new Kudryashov method to various nonlinear partial differential equations. Opt. Quantum Electron. 2023, 55, 8. [Google Scholar] [CrossRef]
- Ozisik, M.; Secer, A.; Bayram, M.; Sulaiman, T.A.; Yusuf, A. Acquiring the solitons of inhomogeneous Murnaghan’s rod using extended Kudryashov method with BernoulliRiccati approach. Int. J. Mod. Phys. B 2022, 36, 2250221. [Google Scholar] [CrossRef]
- Akbar, M.A.; Wazwaz, A.M.; Mahmud, F.; Baleanu, D.; Roy, R.; Barman, H.K.; Mahmoud, W.; Al Sharif, M.A.; Osman, M.S. Dynamical behavior of solitons of the perturbed nonlinear Schrodinger equation and microtubules through the generalized Kudryashov scheme. Results Phys. 2022, 43, 106079. [Google Scholar] [CrossRef]
- Kumar, S.; Niwas, M. New optical soliton solutions of Biswas-Arshed equation using the generalised exponential rational function approach and Kudryashov’s simplest equation approach. Pramana J. Phys. 2022, 96, 204. [Google Scholar] [CrossRef]
- Esen, H.; Secer, A.; Ozisik, M.; Bayram, M. Soliton solutions to the nonlinear higher dimensional Kadomtsev-Petviashvili equation through the new Kudryashov’s technique. Phys. Scr. 2022, 97, 115104. [Google Scholar] [CrossRef]
- Wang, X.; Akram, G.; Sadaf, M.; Mariyam, H.; Abbas, M. Soliton Solution of the Peyrard-Bishop-Dauxois Model of DNA Dynamics with M-Truncated and β-Fractional Derivatives Using Kudryashov-s R Function Method. Fractal Fract. 2022, 6, 616. [Google Scholar] [CrossRef]
- Ozisik, M.; Secer, A.; Bayram, M.; Aydin, H. An encyclopedia of Kudryashov’s integrability approaches applicable to optoelectronic devices. Optik 2022, 265, 169499. [Google Scholar] [CrossRef]
- Arnous, A.H.; Biswas, A.; Kara, A.H.; Milovic, D.; Yildirim, Y.; Alshehri, H.M. Sequel to cubic-quartic optical soliton perturbation with complex Ginzburg-Landau equation by the enhanced Kudryashov’s method. IET Optoelectron. 2022, 16, 149–159. [Google Scholar] [CrossRef]
- Ionescu, C.; Babalic, C.N.; Constantinescu, R.; Efrem, R. The Functional Expansion Approach for Solving NPDEs as a Generalization of the Kudryashov and G′/G Methods. Symmetry 2022, 14, 827. [Google Scholar] [CrossRef]
- Arnous, A.H.; Biswas, A.; Yildirim, Y.; Zhou, Q.; Liu, W.; Alshomrani, A.S.; Alshehri, H.M. Cubic-quartic optical soliton perturbation with complex Ginzburg-Landau equation by the enhanced Kudryashov’s method. Chaos Solitons Fractals 2022, 155, 111748. [Google Scholar] [CrossRef]
- Arnous, A.H.; Zhou, Q.; Biswas, A.; Guggilla, P.; Khan, S.; Yildirim, Y.; Alshomrani, A.S.; Alshehri, H.M. Optical solitons in fiber Bragg gratings with cubic-quartic dispersive reflectivity by enhanced Kudryashov’s approach. Phys. Lett. Sect. A Gen. At. Solid State Phys. 2022, 422, 127797. [Google Scholar] [CrossRef]
- Tekercioglu, R. On TheE Traveling Wave Solutions of Pulse Propagation in Monomode Fiber via the extended Kudryashov’s Approach. Therm. Sci. 2022, 26, S49–S59. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kudryashov, N.A.; Lavrova, S.F. Painlevé Test, Phase Plane Analysis and Analytical Solutions of the Chavy–Waddy–Kolokolnikov Model for the Description of Bacterial Colonies. Mathematics 2023, 11, 3203. https://doi.org/10.3390/math11143203
Kudryashov NA, Lavrova SF. Painlevé Test, Phase Plane Analysis and Analytical Solutions of the Chavy–Waddy–Kolokolnikov Model for the Description of Bacterial Colonies. Mathematics. 2023; 11(14):3203. https://doi.org/10.3390/math11143203
Chicago/Turabian StyleKudryashov, Nikolay A., and Sofia F. Lavrova. 2023. "Painlevé Test, Phase Plane Analysis and Analytical Solutions of the Chavy–Waddy–Kolokolnikov Model for the Description of Bacterial Colonies" Mathematics 11, no. 14: 3203. https://doi.org/10.3390/math11143203