
An Unconditionally Stable Integration Method for Structural Nonlinear Dynamic Problems

Abstract
:1. Introduction
2. Introduction of Several Integration Algorithms
2.1. Newmark-β Method
2.2. Chang Method
2.3. CR Method
2.4. Rosenbrock Integration Method and Implicit Algorithm with an Embedded Newton Iteration of Velocity
3. Derivation of a Novel Linearly Implicit Algorithm
4. Stability Analysis of the Proposed Method
4.1. Stability Analysis for Solving Systems with Nonlinear Restoring Force
4.2. Stability Analysis for Solving Systems with Nonlinear Restoring Force
4.3. Calculation Process of the Proposed Method
5. Analysis of the Applicability and Reliability of the Proposed Method
5.1. Accuracy Analysis of the Proposed Method
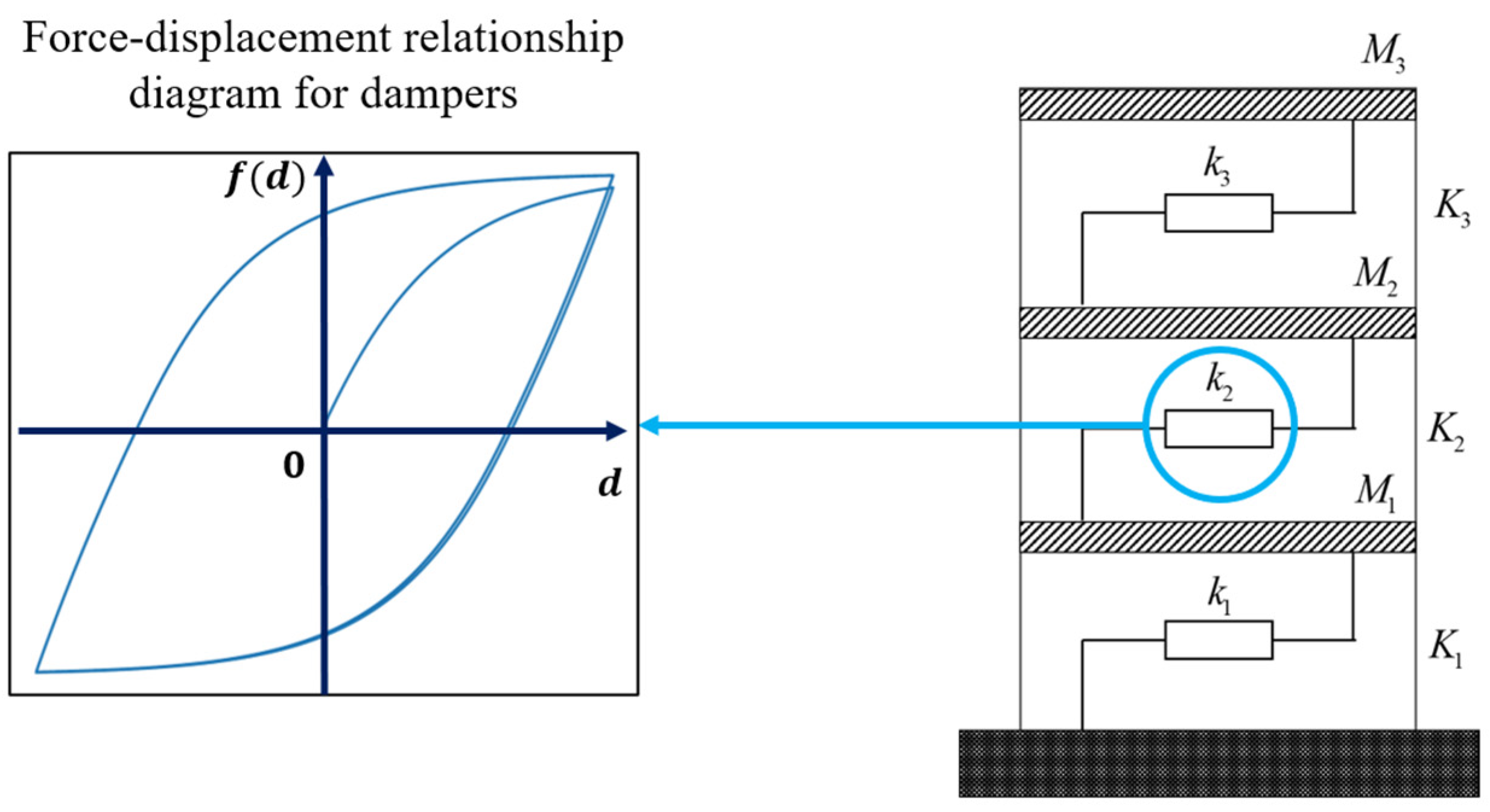
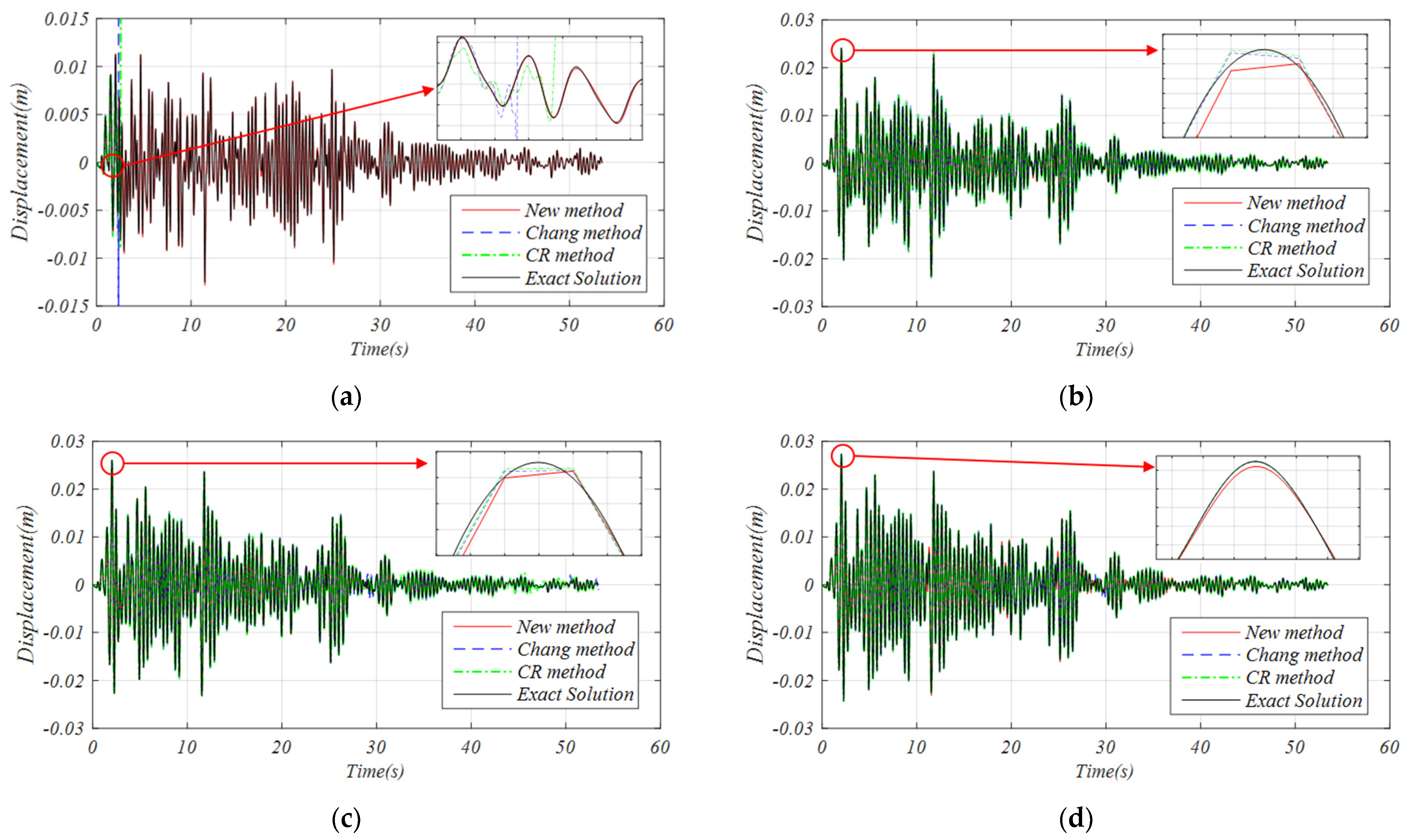
5.2. Numerical Simulation of a Nonlinear Restoring Force Structure
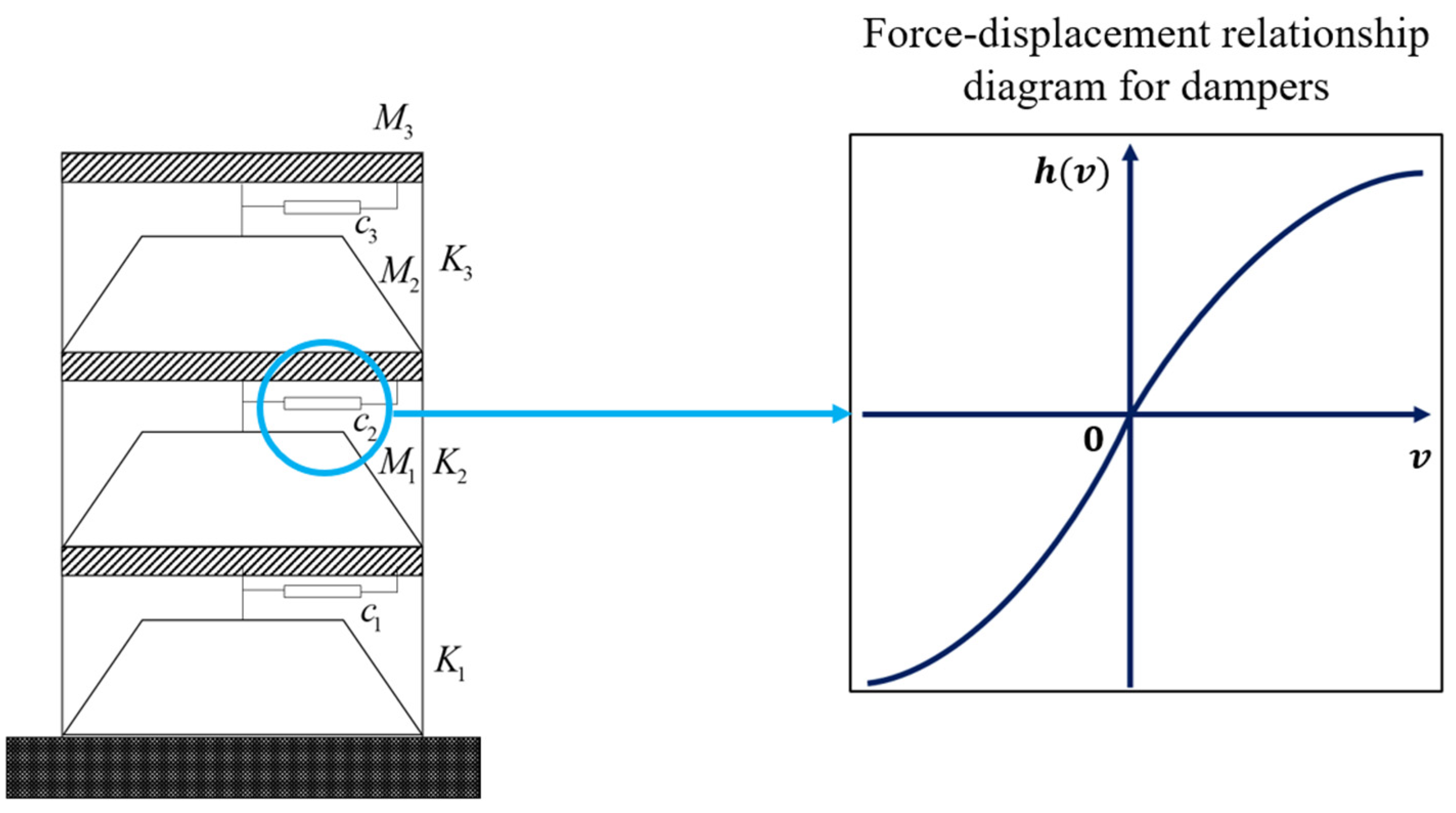
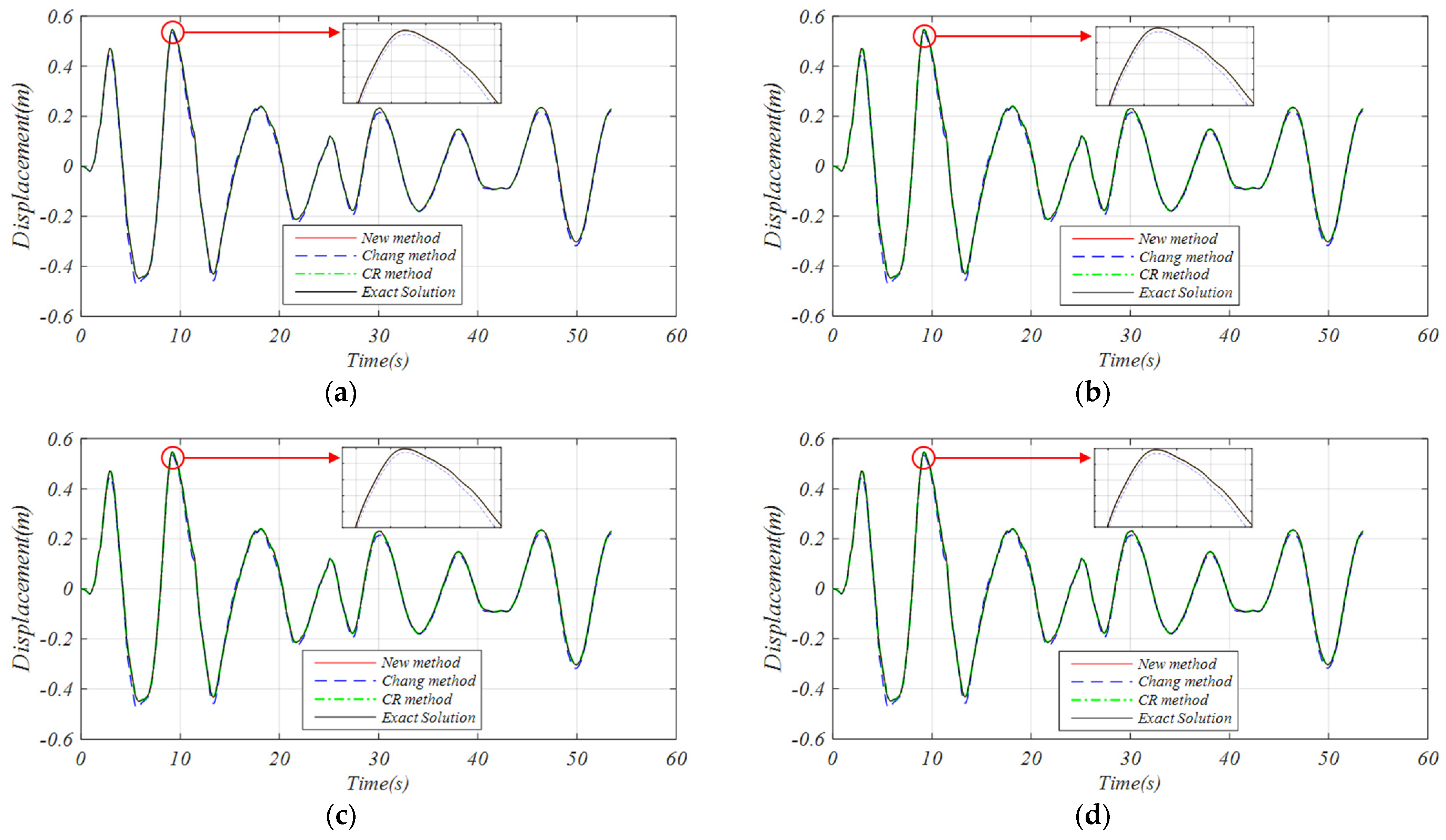
5.3. Numerical Simulation of a Nonlinear Restoring Force Structure
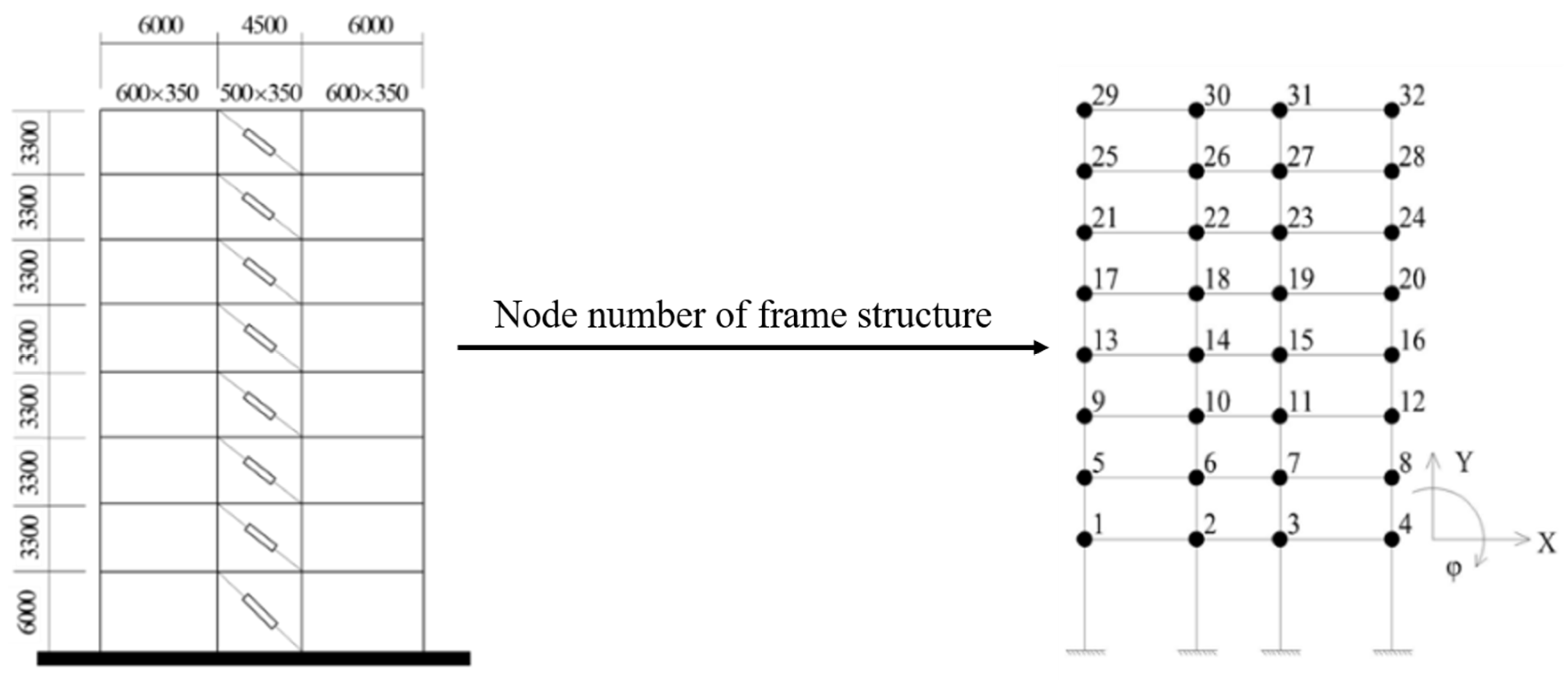
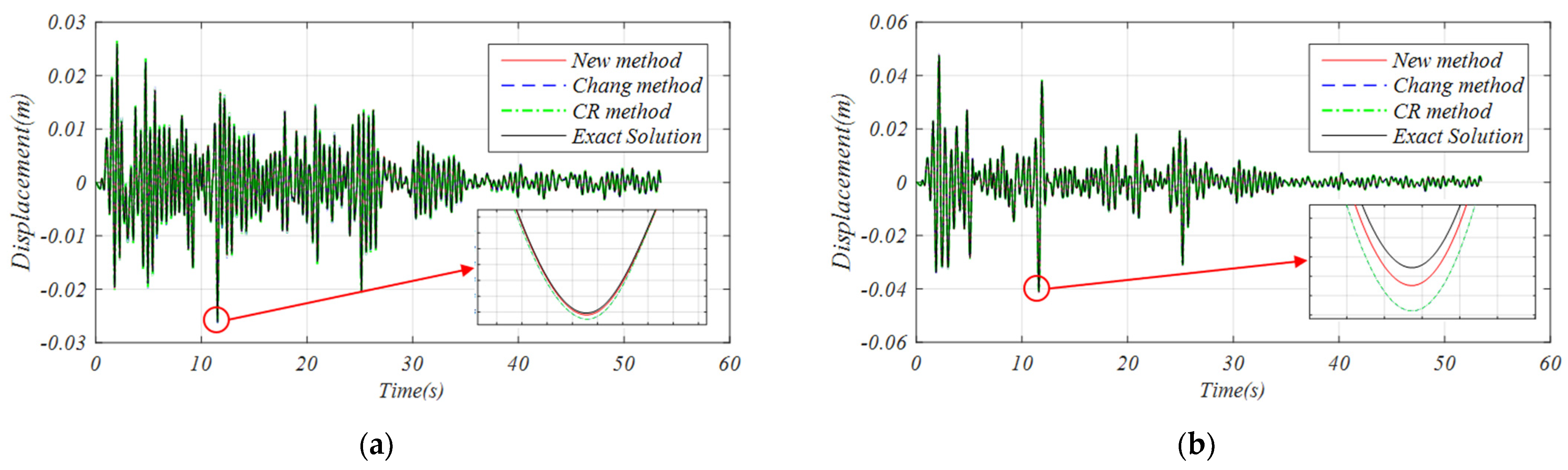
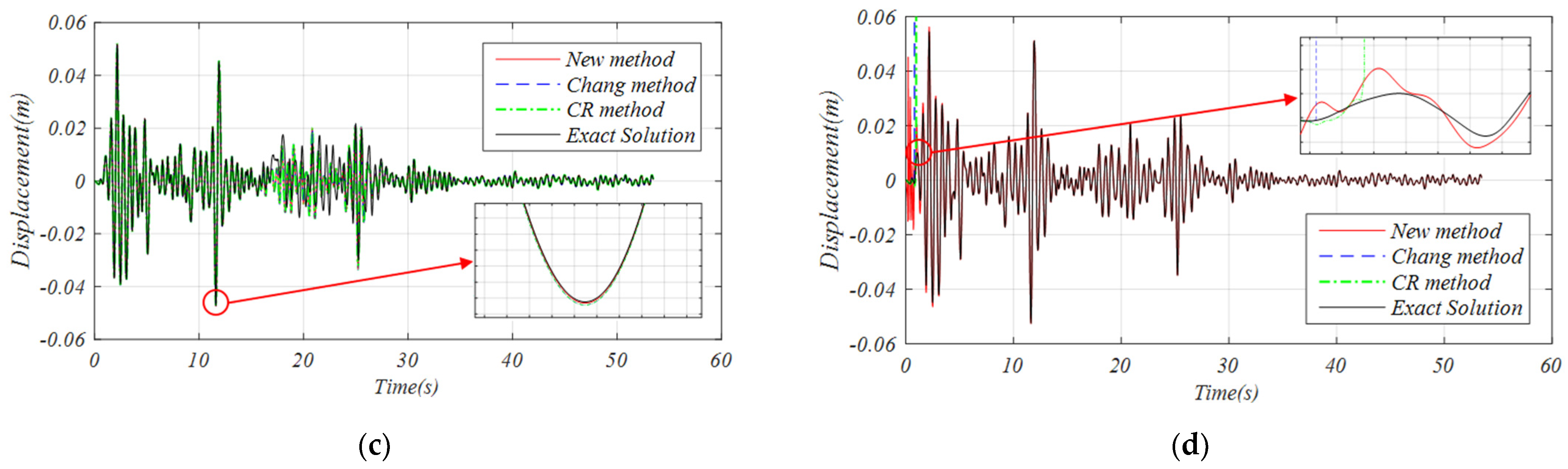
5.4. Numerical Simulation of an MDoF Frame Structure
6. Conclusions
- (1)
- The proposed method utilizes a double explicit format and may be used for the solution of nonlinear problems involving restoring force as well as nonlinear issues involving damping force.
- (2)
- The approach that has been suggested is unconditionally stable in nonlinear damping force problems in addition to nonlinear restoring force problems.
- (3)
- Compared with the Chang and CR approaches, the accuracy of the nonlinear restoring force structure obtained by the suggested method is rather high, leading to its advantages in application and dependability in nonlinear systems.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, R.; Hu, S.; Yang, M.; Zhang, Y. Metallic Yielding Dampers and Fluid Viscous Dampers for Vibration Control in Civil Engineering: A Review. Int. J. Struct. Stab. Dyn. 2022, 22, 2230006. [Google Scholar] [CrossRef]
- Imaduddin, F.; Mazlan, S.A.; Zamzuri, H. A design and modelling review of rotary magnetorheological damper. Mater. Design 2013, 51, 575–591. [Google Scholar] [CrossRef]
- Yang, F.; Sedaghati, R.; Esmailzadeh, E. Vibration suppression of structures using tuned mass damper technology: A state-of-the-art review. J. Vib. Control 2022, 28, 812–836. [Google Scholar] [CrossRef]
- Li, S.; Chen, Y.T.; Chai, Y.H.; Li, B. Effects of brace stiffness and nonlinearity of viscous dampers on seismic performance of structures. Int. J. Struct. Stab. Dyn. 2021, 21, 2150188. [Google Scholar] [CrossRef]
- Dall, A.; Tubaldi, E.; Ragni, L. Influence of the nonlinear behavior of viscous dampers on the seismic demand hazard of building frames. Earthq. Eng. Struct. Dyn. 2016, 45, 149–169. [Google Scholar]
- Du, X.Q.; Yang, D.X.; Zhou, J.L.; Yan, X.L.; Zhao, Y.L.; Li, S. New Explicit Integration Algorithms with controllable numerical dissipation for structural dynamics. Int. J. Struct. Stab. Dyn. 2018, 18, 1850044. [Google Scholar] [CrossRef]
- Li, S.; Qin, L.B.; Guo, H.C.; Yang, D.X. A method of improving time integration algorithm accuracy for long-term dynamic simulation. Int. J. Struct. Stab. Dyn. 2020, 20, 2050079. [Google Scholar] [CrossRef]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. ASCE 1959, 85, 67–94. [Google Scholar] [CrossRef]
- Wilson, E.L.; Farhoomand, I.; Bathe, K.J. Nonlinear dynamic analysis of complex structures. Earthq. Eng. Struct. Dyn. 1972, 1, 241–252. [Google Scholar] [CrossRef]
- Park, K. An improved stiffly stable method for direct integration of nonlinear structural dynamic equations. J. Appl. Mech. 1975, 42, 464–470. [Google Scholar] [CrossRef]
- Hilber, H.M.; Hughes, T.J.R.; Taylor, R.L. Improved numerical dissipation for time integration algorithms in structural dynamics. Earthq. Eng. Struct. Dyn. 1977, 5, 283–292. [Google Scholar] [CrossRef] [Green Version]
- Wood, W.L.; Bossak, M.; Zienkiwicz, O.C. An alpha modification of Newmark’s method. Int. J. Numer. Methods Eng. 1980, 15, 1562–1566. [Google Scholar] [CrossRef]
- Shao, H.; Cai, C. A three parameters algorithm for numerical integration of structural dynamic equations. Chin. J. Appl. Mech. 1988, 5, 76–81. [Google Scholar]
- Chung, J.; Hulbert, G.M. A time integration algorithm for structural dynamics with improved numerical dissipation: The generalized-α method. J. Appl. Mech. ASME 1993, 60, 371–375. [Google Scholar] [CrossRef]
- Bathe, K.J.; Baig, M.M.I. On a composite implicit time integration procedure for nonlinear dynamics. Comput. Struct. 2005, 83, 2513–2524. [Google Scholar] [CrossRef]
- Wu, B.; Xu, G.; Wang, Q.; Williams, M. Operator-splitting method for real-time substructure testing. Earthq. Eng. Struct. Dyn. 2006, 35, 293–314. [Google Scholar] [CrossRef]
- Rezaiee-Pajand, M.; Alamatian, J. Implicit higher-order accuracy method for numerical integration in dynamic analysis. J. Struct. Eng. 2008, 134, 973–985. [Google Scholar] [CrossRef]
- Pajand, M.R.; Sarafrazi, S.R.; Hashemian, M. Improving stability domains of the implicit higher order accuracy method. Int. J. Numer. Meth. Eng. 2011, 88, 880–896. [Google Scholar] [CrossRef]
- Shojaee, S.; Rostami, S.; Abbasi, A. An unconditionally stable implicit time integration algorithm: Modified quartic B-spline method. Comput. Struct. 2015, 153, 98–111. [Google Scholar] [CrossRef]
- Gardner, D.J.; Woodward, C.S.; Reynolds, D.R. Implicit integration methods for dislocation dynamics. Model. Simul. Mat. Sci. Eng. 2015, 23, 025006. [Google Scholar] [CrossRef]
- Shimada, M.; Hoitink, A.; Tamma, K.K. The fundamentals underlying the computations of acceleration for general dynamic applications: Issues and noteworthy perspectives. CMES Comput. Model. Eng. Sci. 2015, 104, 133–158. [Google Scholar]
- Shimada, M.; Masuri, S.; Tamma, K.K. A novel design of an isochronous integration [iIntegration] framework for first/second order multidisciplinary transient systems. Int. J. Numer. Methods Eng. 2015, 102, 867–891. [Google Scholar] [CrossRef]
- Hughes, T.J.R. The Finite Element Method; Prentice Hall: New Jersey, NJ, USA, 2001. [Google Scholar]
- Bursi, O.S.; He, L.; Lamarche, C.; Bonelli, A. Linearly implicit time integration methods for real-time dynamic substructure testing. J. Eng. Mech. 2010, 136, 1380–1389. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C. The Finite Element Method; McGraw-Hill: New York, NY, USA, 1977. [Google Scholar]
- Belytschko, T.; Hughes, T.J.R. Computational Methods for Transient Analysis; Elsevier: Amsterdam, The Netherlands, 1983. [Google Scholar]
- Hughes, T.J.R. The Finite Element Method; Prentice-Hall: Englewood Cliffs, NJ, USA, 1987. [Google Scholar]
- Yin, S.H. A new explicit time integration method for structural dynamics. Int. J. Struct. Stability. Dyn. 2013, 13, 1250068. [Google Scholar] [CrossRef]
- Chen, C.; Ricles, J.M. Stability analysis of direct integration algorithms applied to MDOF nonlinear structural dynamics. J. Eng. Mech. 2008, 136, 485–495. [Google Scholar] [CrossRef]
- Arnold, M.; Burgermeister, B.; Eichberger, A. Linearly implicit time integration methods in real-time applications DAEs and stiff ODEs. Multibody Syst. Dyn. 2007, 17, 99–117. [Google Scholar] [CrossRef]
- Chi, F.D.; Wang, J.T.; Jin, F. Delay-dependent stability and added damping of SDOF real-time dynamic hybrid testing. Earth. Eng. Eng. Vib. 2010, 9, 425–438. [Google Scholar] [CrossRef]
- Chang, S.Y. An explicit structure-dependent algorithm for pseudo dynamic testing. Eng. Struct. 2013, 46, 511–525. [Google Scholar] [CrossRef]
- Chang, S.Y. Explicit pseudo dynamic algorithm with unconditional stability. J. Eng. Mech. ASCE 2002, 128, 935–947. [Google Scholar] [CrossRef]
- Kolay, C.; Ricles, J.M. Assessment of explicit and semi-explicit classes of model-based algorithms for direct integration in structural dynamics. Int. J. Numer. Methods Eng. 2016, 107, 49–73. [Google Scholar] [CrossRef]
- Li, S.; Yang, D.X.; Guo, H.C.; Liang, G. General formulation of eliminating unusual amplitude grow for structure-dependent integration algorithms. Int. J. Struct. Stab. Dyn. 2019, 20, 2050006. [Google Scholar] [CrossRef]
- Chen, C.; Ricles, J.M. Development of direct integration algorithms for structural dynamics using discrete control theory. J. Eng. Mech. ASCE 2008, 134, 676–683. [Google Scholar] [CrossRef]
- Chang, S.Y. Unusual overshooting in steady-state response for structure-dependent integration methods. J. Earthq. Eng. 2017, 21, 1220–1233. [Google Scholar] [CrossRef]
- Chang, S.Y. Elimination of overshoot in forced vibration responses for Chang explicit family methods. J. Eng. Mech. ASCE 2018, 144, 04017177. [Google Scholar] [CrossRef]
- Chang, S.Y. An unusual amplitude grow property and its remedy for structure-dependent integration methods. Comput. Methods Appl. Mech. Eng. 2018, 330, 498–521. [Google Scholar] [CrossRef]
- Rosenbrock, H. Some general implicit processes for the numerical solution of differential equations. Comput. J. 1963, 5, 329–330. [Google Scholar] [CrossRef] [Green Version]
- Fish, J.; Chen, W. On accuracy, stability and efficiency of the Newmark method with incomplete solution by multilevel methods. Int. J. Numer. Methods Eng. 1999, 46, 253–273. [Google Scholar] [CrossRef]
- Jia, C.G. Monolithic and Partitioned Rosenbrock-Based Time Integration Methods for Dynamic Substructure Tests. Ph.D. Thesis, University of Trento, Trento, Italy, 2010. [Google Scholar]
- Jia, C.G.; Su, H.C.; Li, Y.T.; Gou, Y.Q. Linearly Implicit Algorithm with Embedded Newton Iteration of Velocity and its Application in Nonlinear Dynamic Analysis of Structures. Int. J. Struct. Stab. Dyn. 2023, 2450010. [Google Scholar] [CrossRef]
- Wu, B.; Pan, T.; Yang, H.; Xie, J.; Spencer, B.F. Energy-consistent integration method and its application to hybrid testing. Earthq. Eng. Struct. Dyn. 2020, 49, 415–433. [Google Scholar] [CrossRef]
- Ogata, K. Discrete-Time Control Systems; Prentice Hall: New Jersey, NY, USA, 1995. [Google Scholar]
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering, 2nd ed.; Prentice Hall: New Jersey, NY, USA, 2001. [Google Scholar]
- Chen, C.; Ricles, J.M. Stability analysis of direct integration algorithms applied to nonlinear structural dynamics. J. Eng. Mech. ASCE 2008, 134, 703–711. [Google Scholar] [CrossRef]
- Christopoulos, C.; Filiatrault, A. Principles of Supplemental Damping and Seismic Isolation; IUSS Press: Pavia, Italy, 2006. [Google Scholar]
- Li, H.N.; Huang, Z.; Fu, X.; Li, G. A re-centering deformation-amplified shape memory alloy damper for mitigating seismic response of building structures. Struct. Control Health. Monit. 2018, 25, e2233. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Steps | New Algorithm | CR Method | Chang Method |
|---|---|---|---|
| = 0.01 | −7.43 × 10−8 | −9.46 × 10−7 | −9.51 × 10−7 |
| = 0.001 | −7.50 × 10−10 | −1.09 × 10−8 | −1.10 × 10−8 |
| = 0.0001 | −7.51 × 10−12 | −1.28 × 10−10 | −1.28 × 10−10 |
| γ | New Algorithm | CR Method | Chang Method |
|---|---|---|---|
| −1000 | 0.20% | destabilization | destabilization |
| −200 | 0.20% | 0.01% | 0.05% |
| 200 | 0.13% | 0.09% | 0.12% |
| 1000 | 0.10% | 0.08% | 0.03% |
| A | New Algorithm | CR Method | Chang Method |
|---|---|---|---|
| 0.1 | 0.03% | 0.01% | 2.19% |
| 0.3 | 0.06% | 0.04% | 2.22% |
| 0.5 | 0.08% | 0.07% | 2.25% |
| 0.7 | 0.07% | 0.09% | 2.27% |
| γ | New Algorithm | CR Method | Chang Method |
|---|---|---|---|
| −1000 | 0.74% | 2.52% | 2.48% |
| −200 | 0.15% | 0.92% | 0.93% |
| 200 | 0.07% | 0.51% | 0.52% |
| 1000 | 3.22% | destabilization | destabilization |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, C.; Su, H.; Guo, W.; Li, Y.; Wu, B.; Gou, Y. An Unconditionally Stable Integration Method for Structural Nonlinear Dynamic Problems. Mathematics 2023, 11, 2987. https://doi.org/10.3390/math11132987
Jia C, Su H, Guo W, Li Y, Wu B, Gou Y. An Unconditionally Stable Integration Method for Structural Nonlinear Dynamic Problems. Mathematics. 2023; 11(13):2987. https://doi.org/10.3390/math11132987
Chicago/Turabian StyleJia, Chuanguo, Hongchen Su, Weinan Guo, Yutao Li, Biying Wu, and Yingqi Gou. 2023. "An Unconditionally Stable Integration Method for Structural Nonlinear Dynamic Problems" Mathematics 11, no. 13: 2987. https://doi.org/10.3390/math11132987