
Global–Local Non Intrusive Analysis with 1D to 3D Coupling: Application to Crack Propagation and Extension to Commercial Software

Abstract
:1. Introduction
2. Methodology
2.1. Primal–Dual Global–Local Analysis
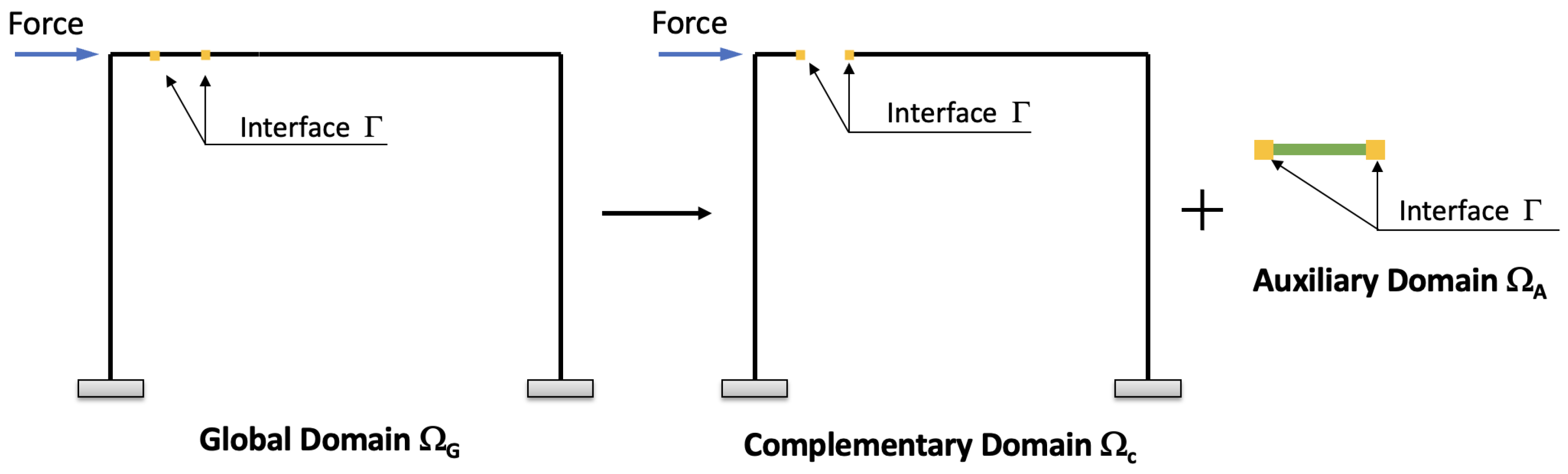
- First, the global problem is solved by obtaining the displacements :where is the stiffness matrix of the global model, is the external load vector in the domain , is a coupling operator of the global problem that relates the degrees of freedom of the interface with respect to the degrees of freedom of the complete domain, and is the compensation force (vector) of the previous iteration. For the first iteration, is a vector of zeros for a 3D frame global model with an interface of two nodes.
- Second, the auxiliary problem is solved by imposing the displacements and solve for the reaction forces in the interface zone:where is the stiffness matrix of the auxiliary model, is the external load vector, and is the reaction force at the interface for the domain .The can be obtained directly in some software, allowing the obtainment of the reaction forces from embedded structures within a global problem.The displacements can be extracted from the solution of the global problem using the following relation:where is a coupling operator that relates the degrees of freedom of the interface with respect to the Auxiliary domain and was previously defined.
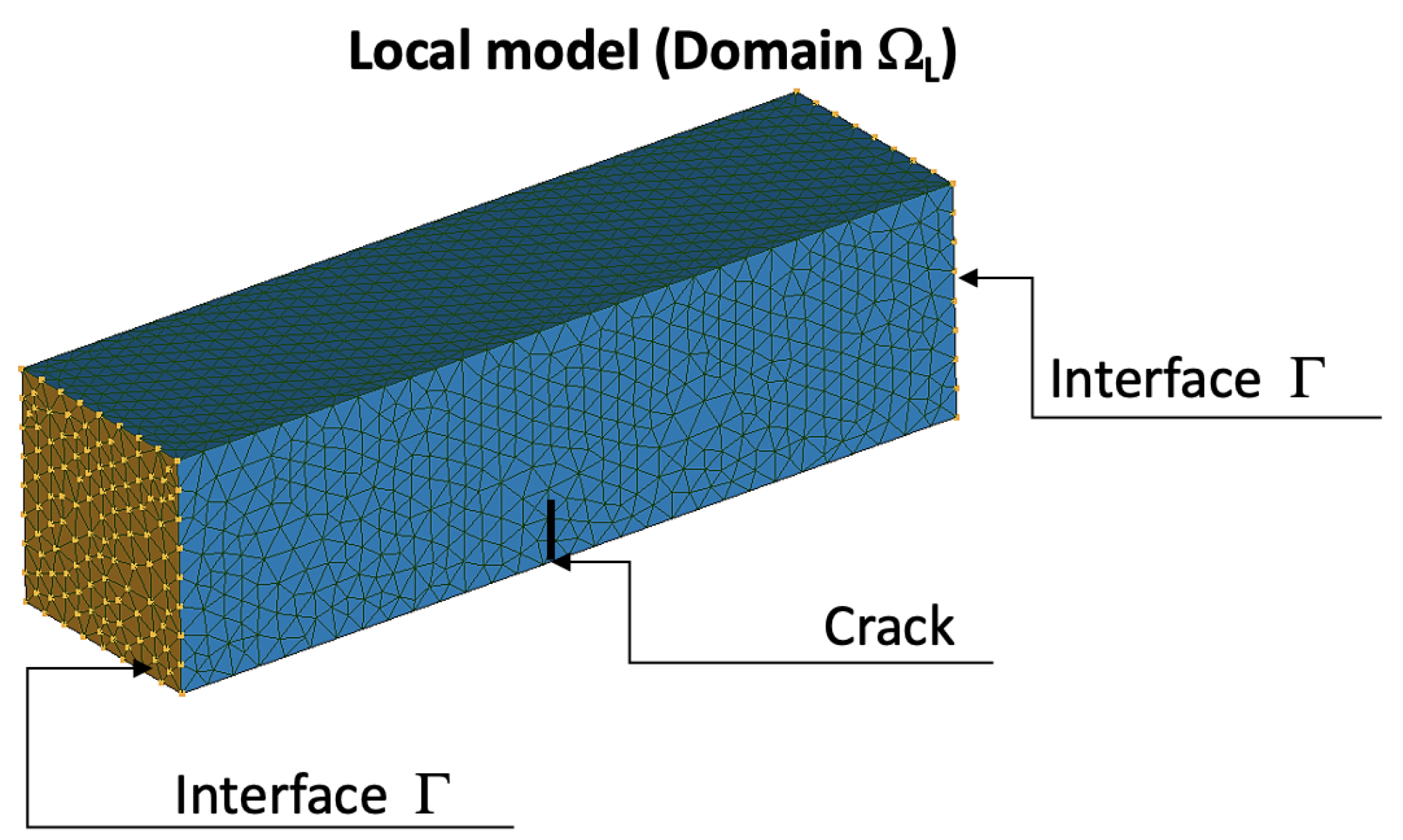
- Third, the local problem is solved by imposing the displacements on the interface of the local modelwhere is an operator that relates the degrees of freedom of the interface with respect to the degrees of freedom of the local domain , are the displacement on the interface of the local model and is a projection operator, from the global 1D model to the local 3D domain. The formulation of this projector is presented in Section 2.3.Hence, the reaction forces of the local model in the interface, solved by means of a nonlinear solver such as Arc Length Method [44] or Newthon–Raphson Method, is obtained from the following equation:where is the stiffness matrix of the local model, is the external load vector in the domain and is the reaction force at the interface.
- Fourth, the correction forces that will be applied to the global model are calculated:where the projector operator , from the local to the global domain, is also presented in Section 2.3 and is used with a Code_Aster built-in function.
- Fifth, the residual force is calculated and the error of the solution obtained in the iteration is estimated:
- Finally, a relaxation scheme is considered, obtaining the following correction force:This relaxation allows for better convergence, for example, when Aitken relaxation method is used [19].
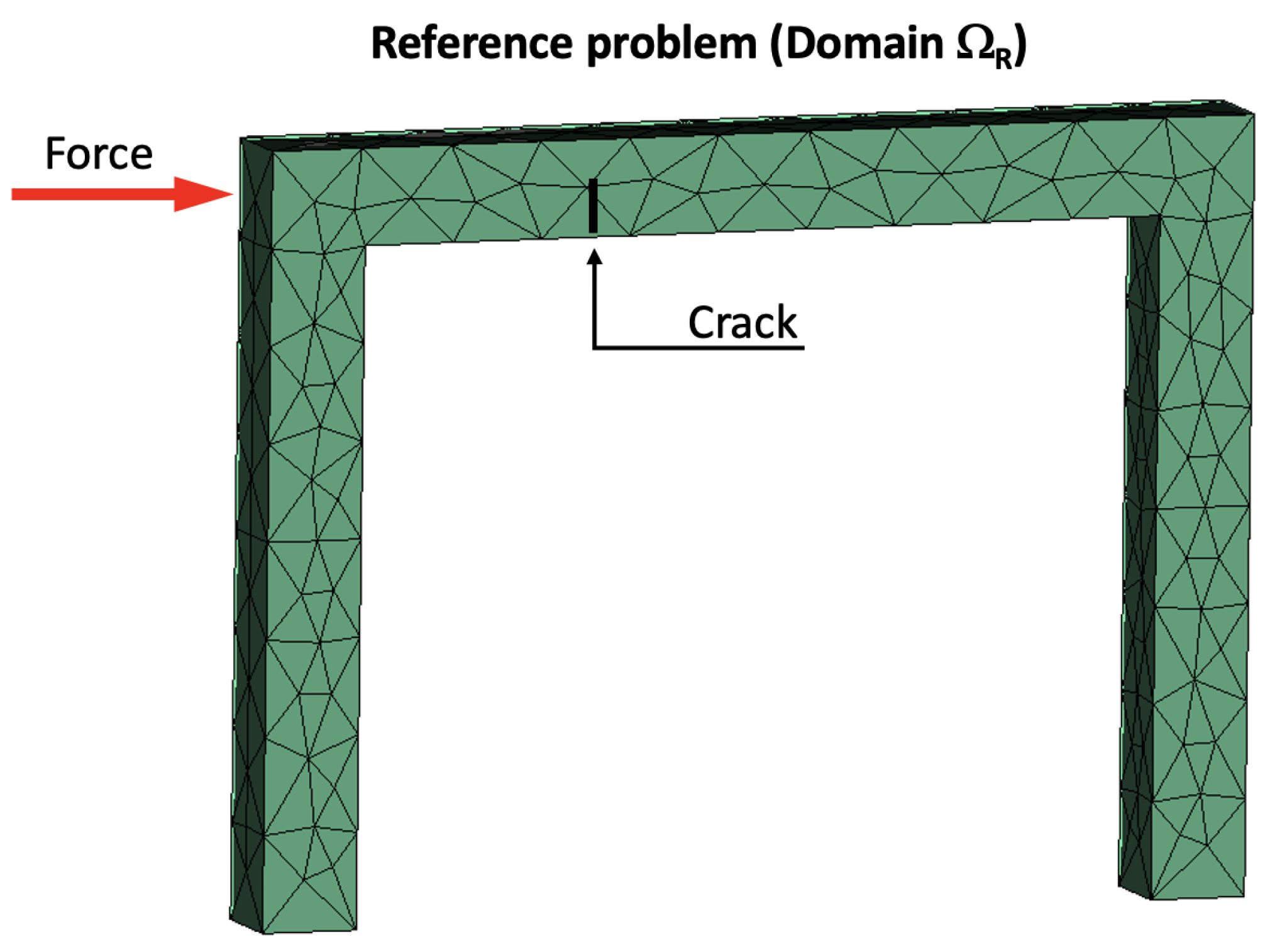
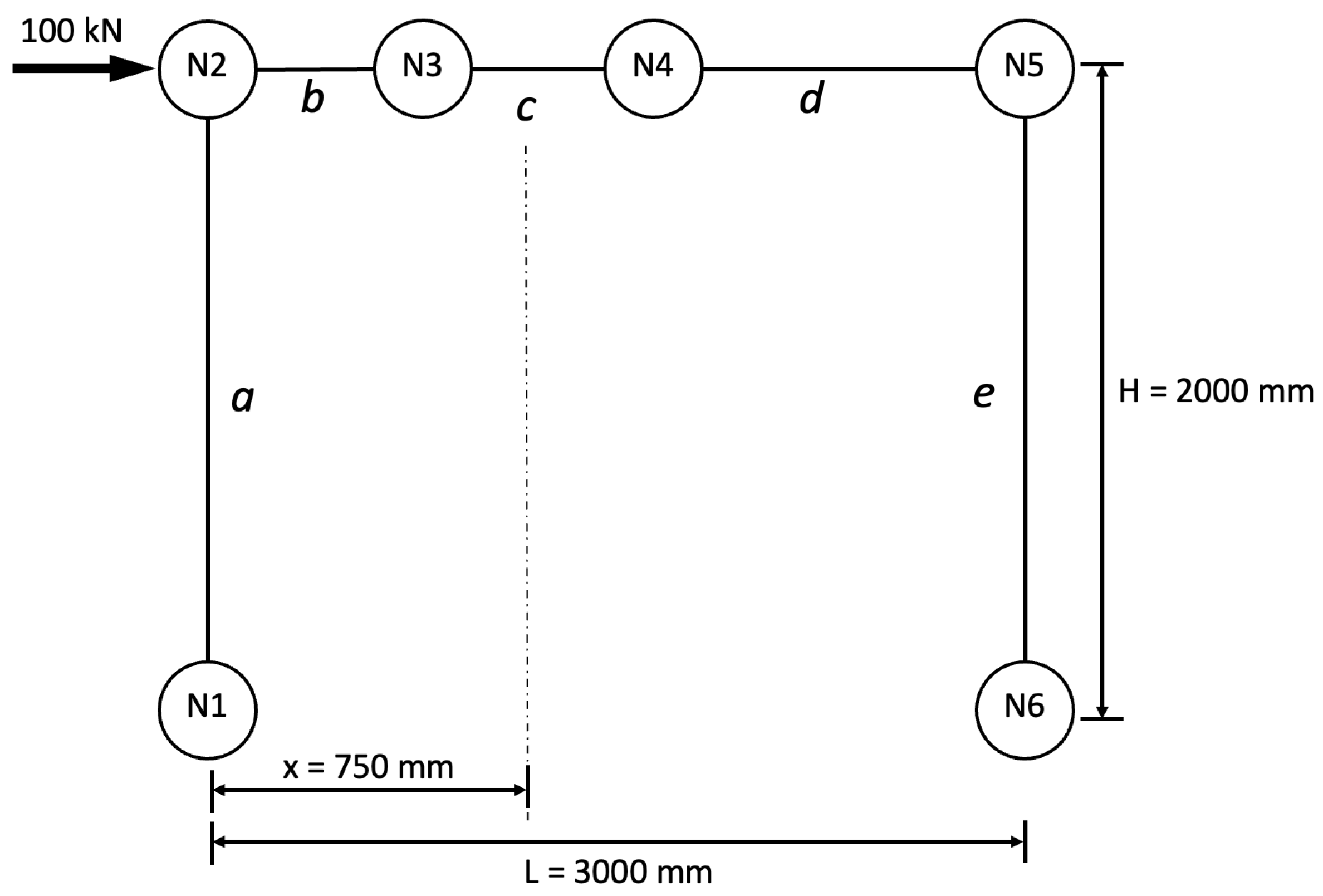
2.2. Case Study
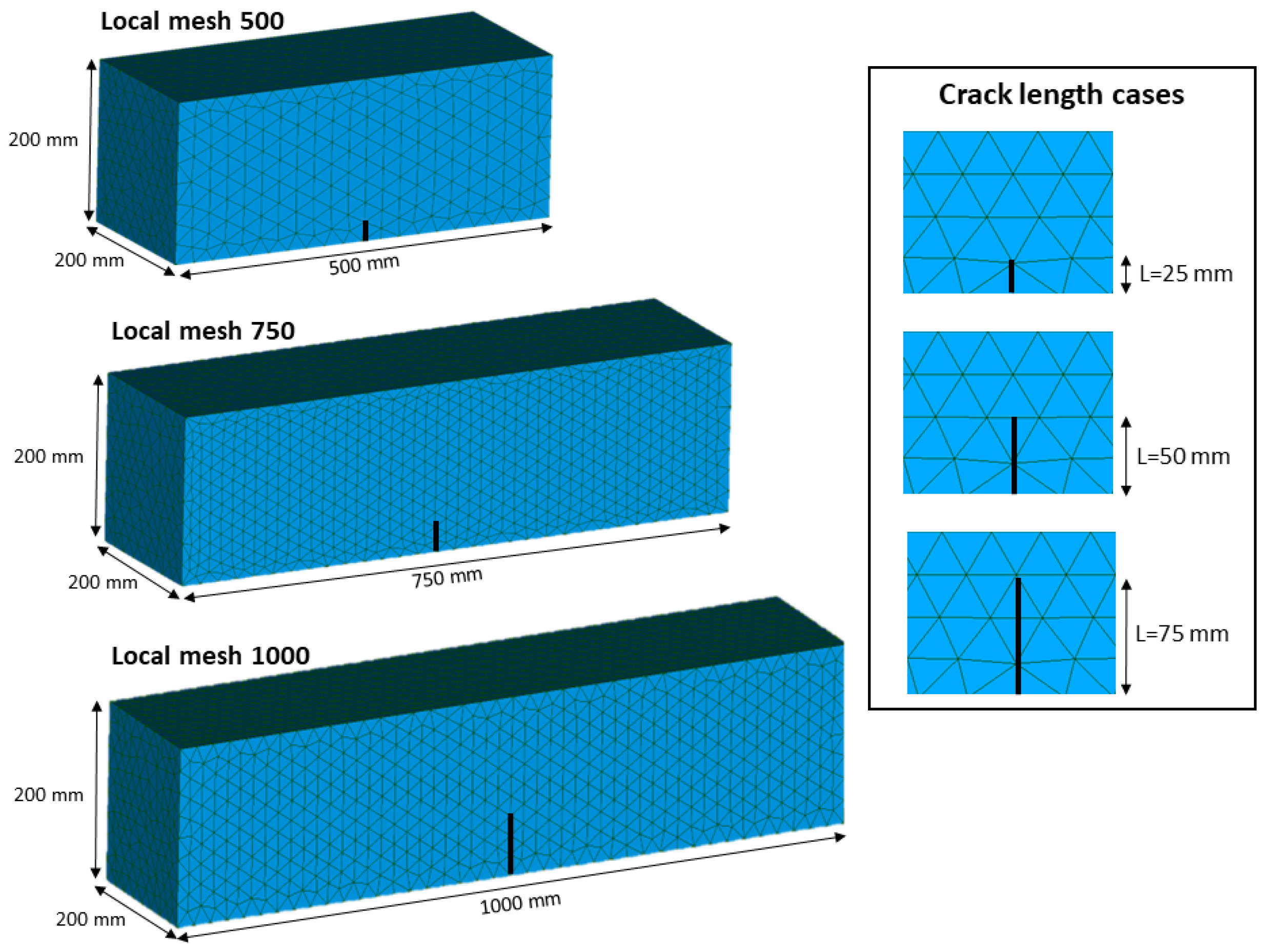
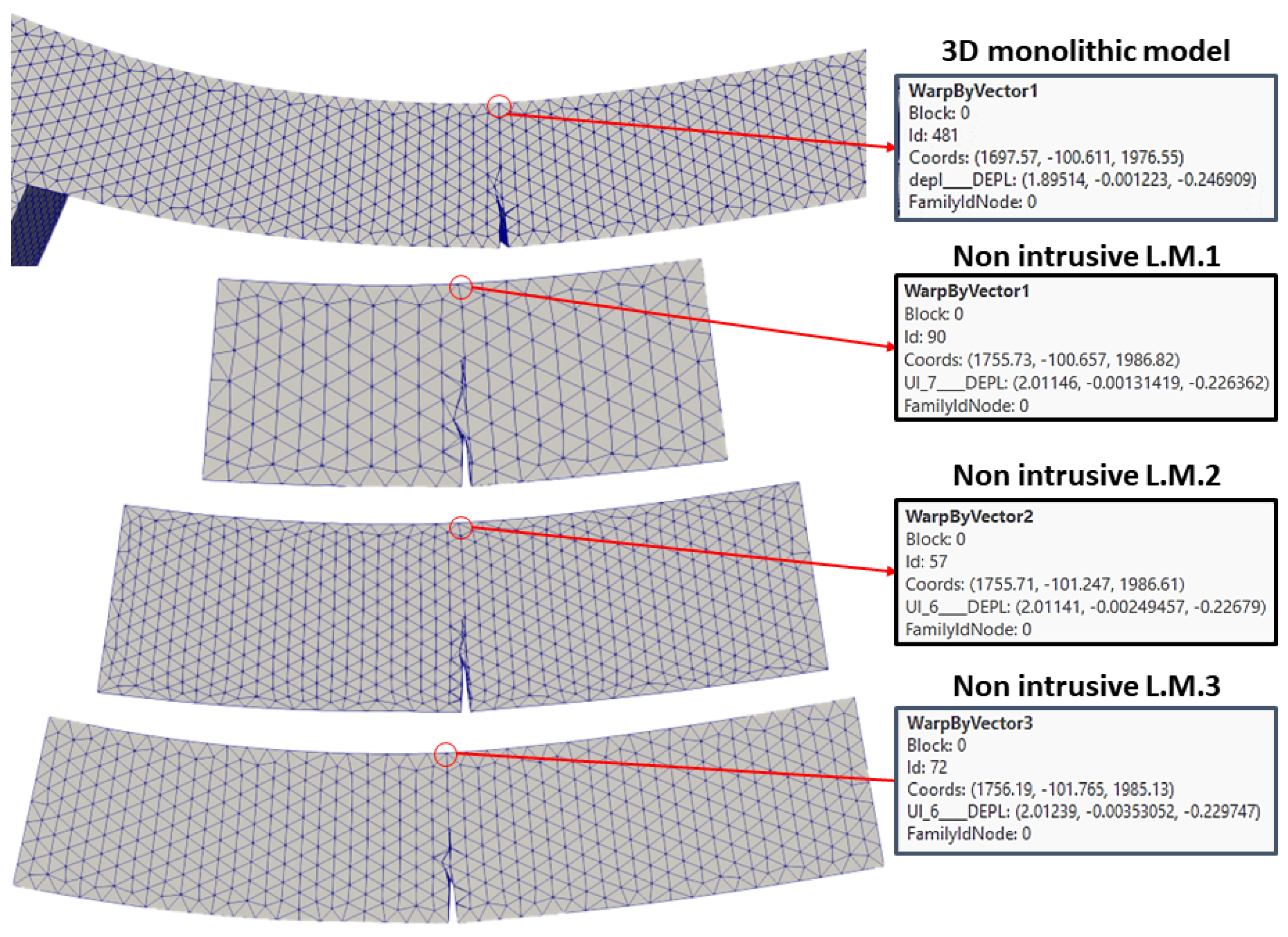
- Local Mesh 1 (L.M. 1): Length 500 mm
- Local Mesh 2 (L.M. 2): Length 750 mm
- Local Mesh 3 (L.M. 3): Length 1000 mm
- The direction of propagation is taken into account, with a tangent vector (0,0,1) and normal vector (1,0,0) with the function of Code_Aster.
- The propagation is calculated internally, calculating the energy release rate using the intensity factors with the function of Code_Aster for a predefined number of propagation steps (function ).
2.3. Projection of Displacements from the Global 1D Model to the Local 3D Model
- 1.
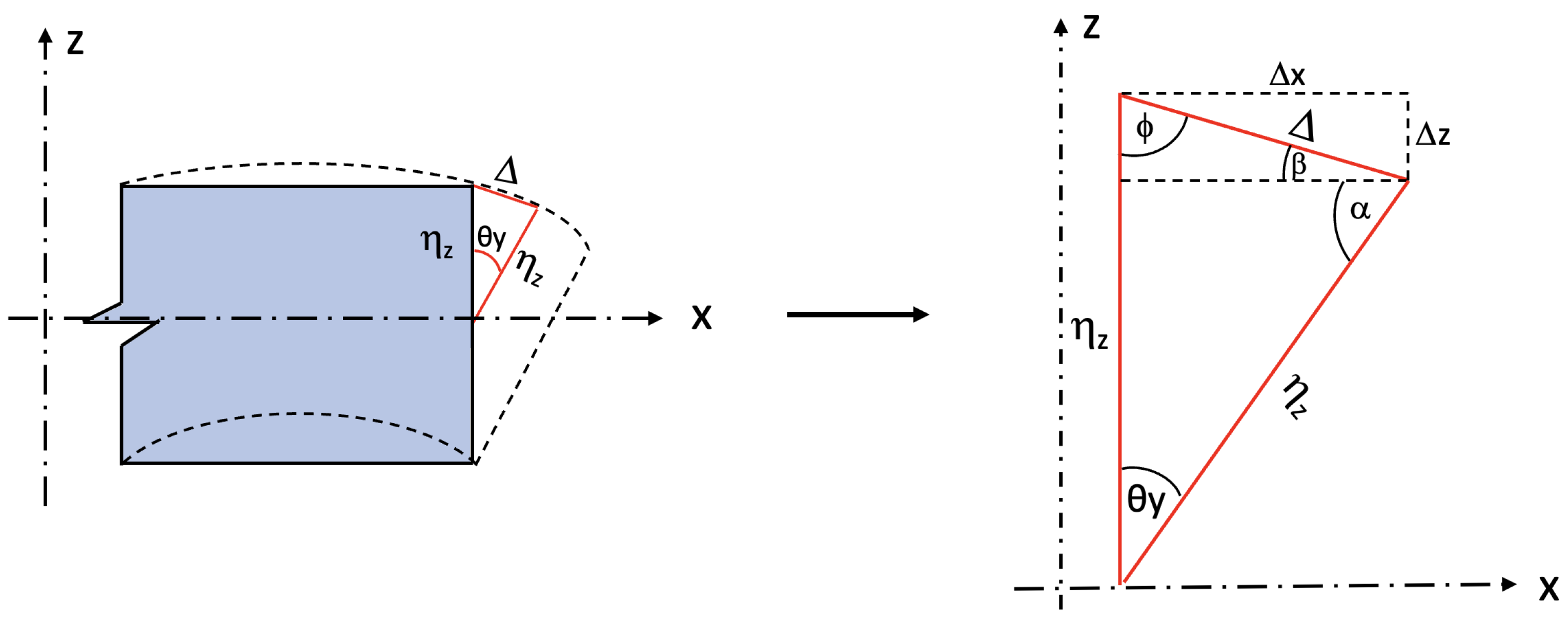
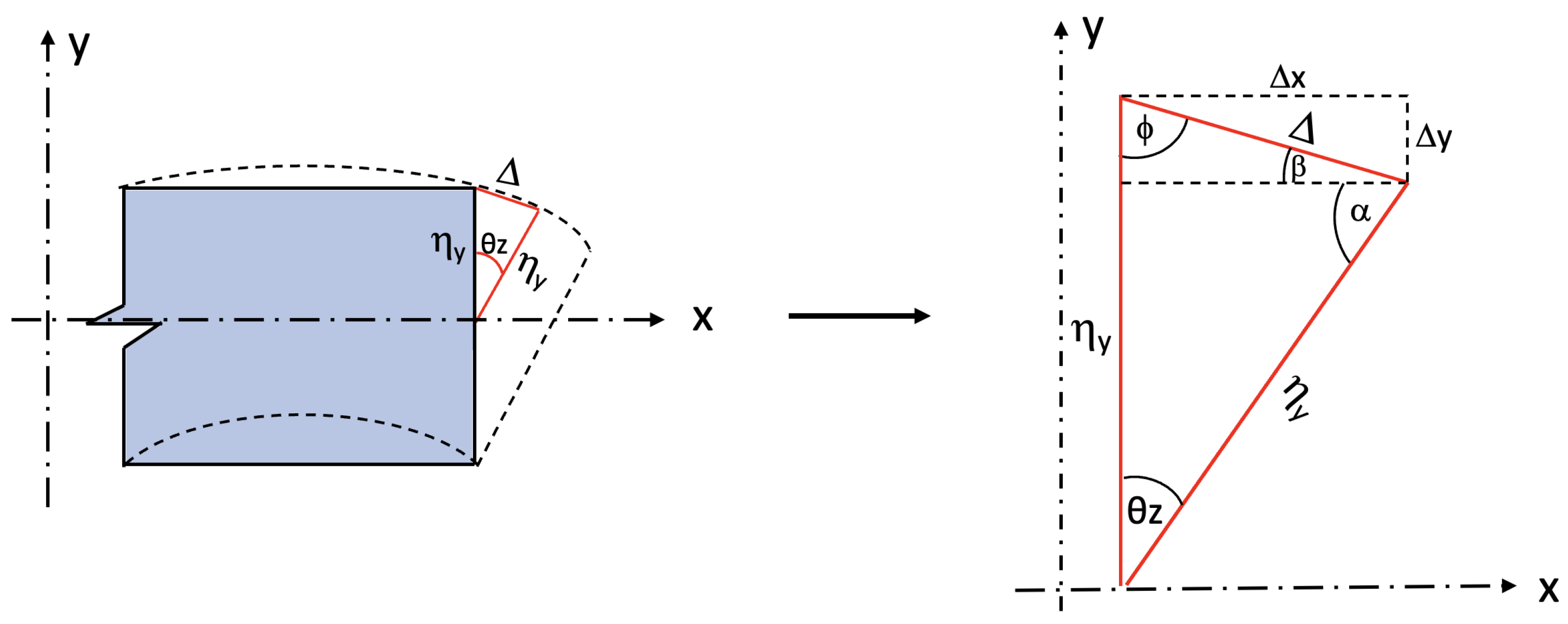
- To calculate the displacement generated from the rotation resulting from bending , kinematic compatibility is considered, using a non-deformable finite element (solid face with no warping) and rotating with respect to the centroid. The face of the 3D element analyzed has a maximum distance from the centroid and when rotated it is maintained, producing a displacement , as shown in Figure 8.
- 2.
- 3.
- Finally, the values of and are found, which would be the effects that must be considered due the bending rotations, leading to the following expressions:
- 1.
- 2.
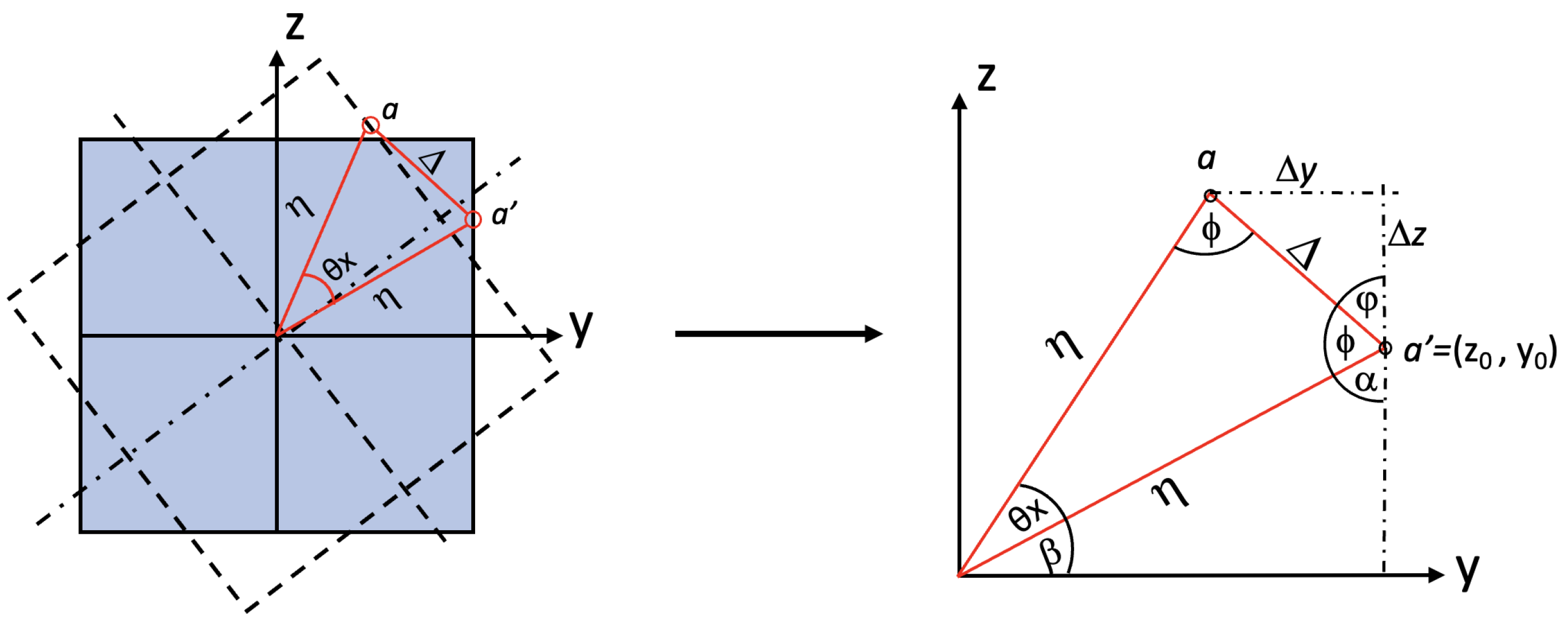
- Then, the values of and are found, which would be the effects on the displacement due to torsional moment, leading to:
3. Implementation of the Methodology in Code_Aster
3.1. Validation of the Implementation in Code_Aster
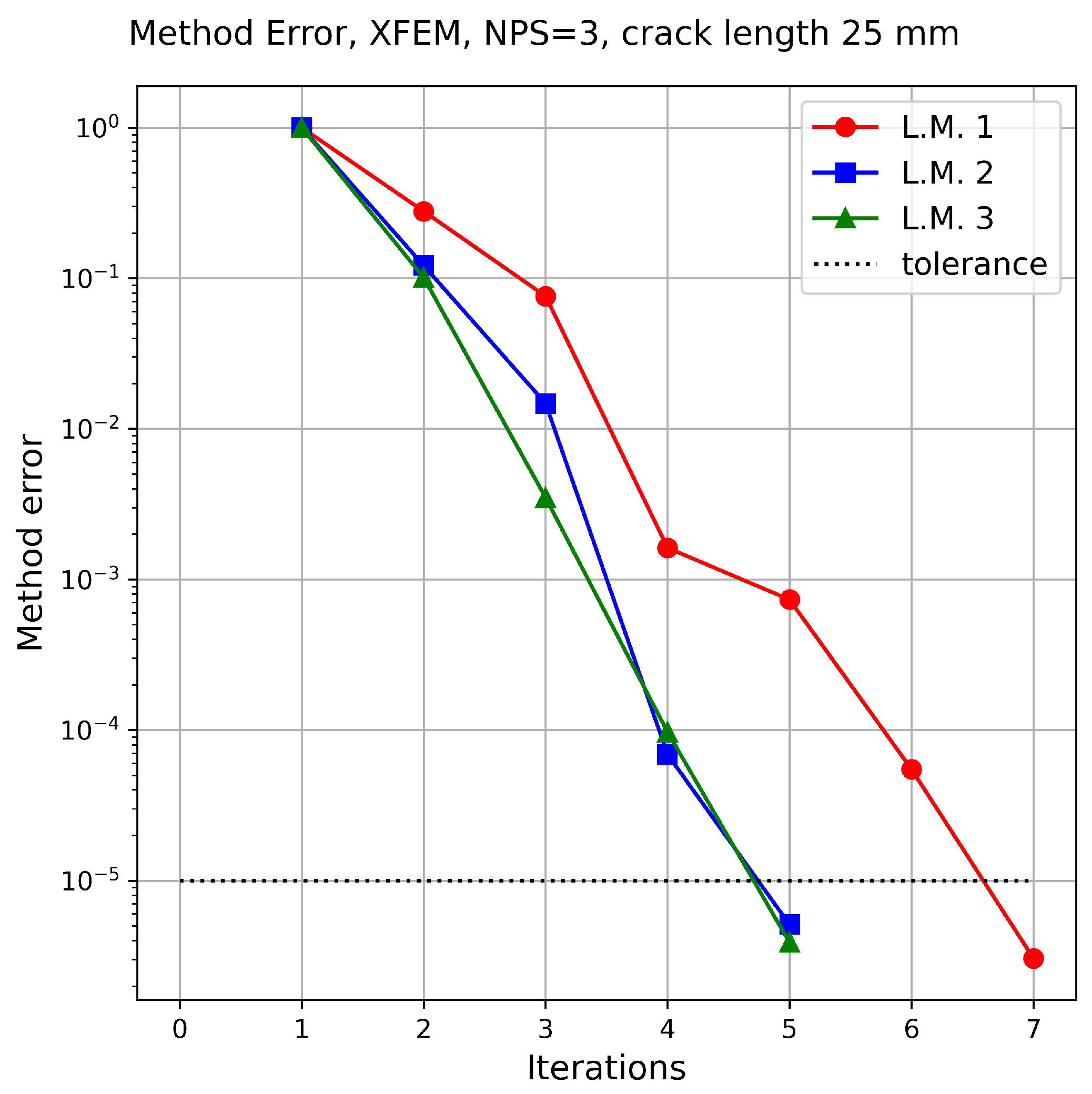
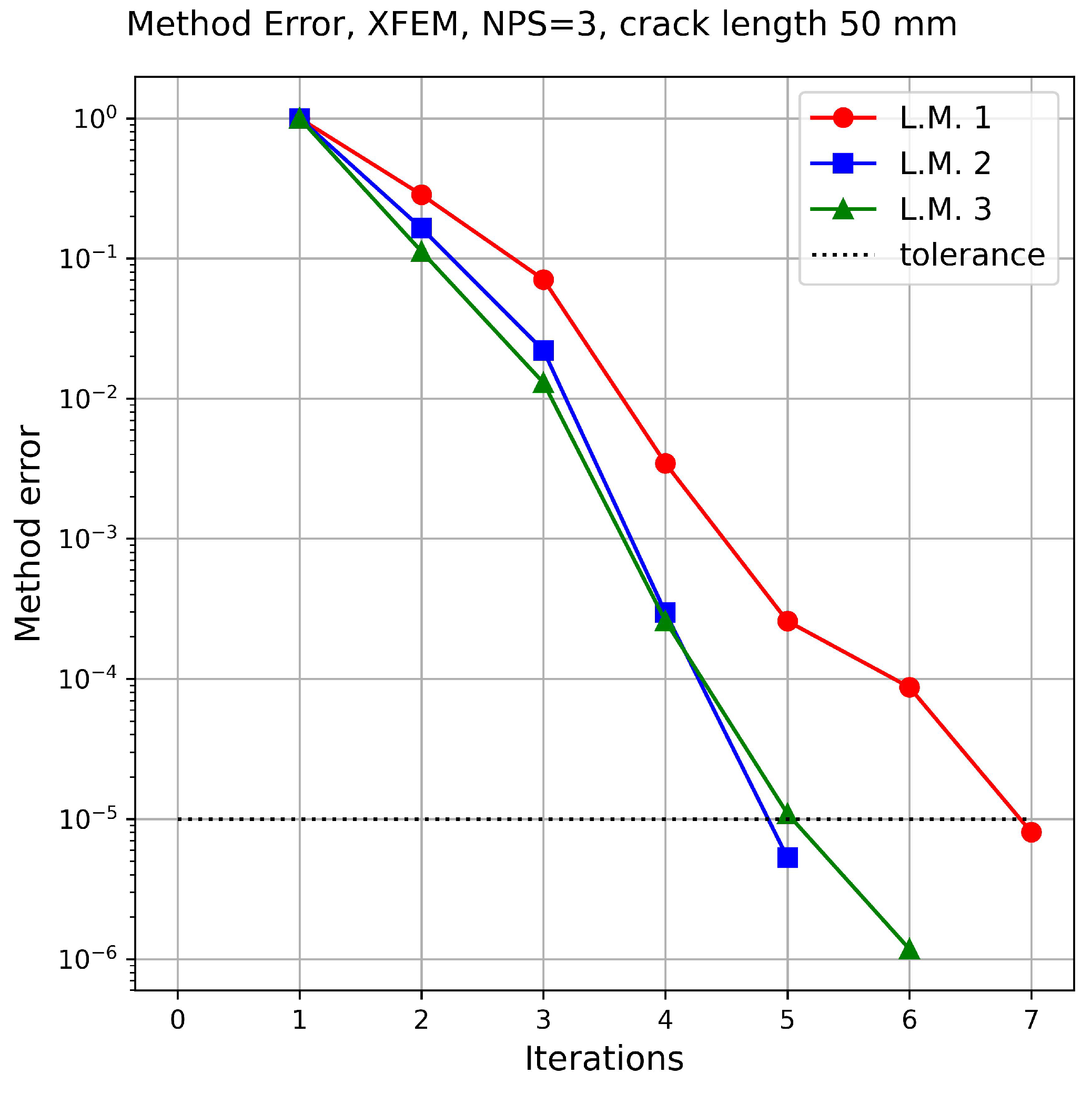
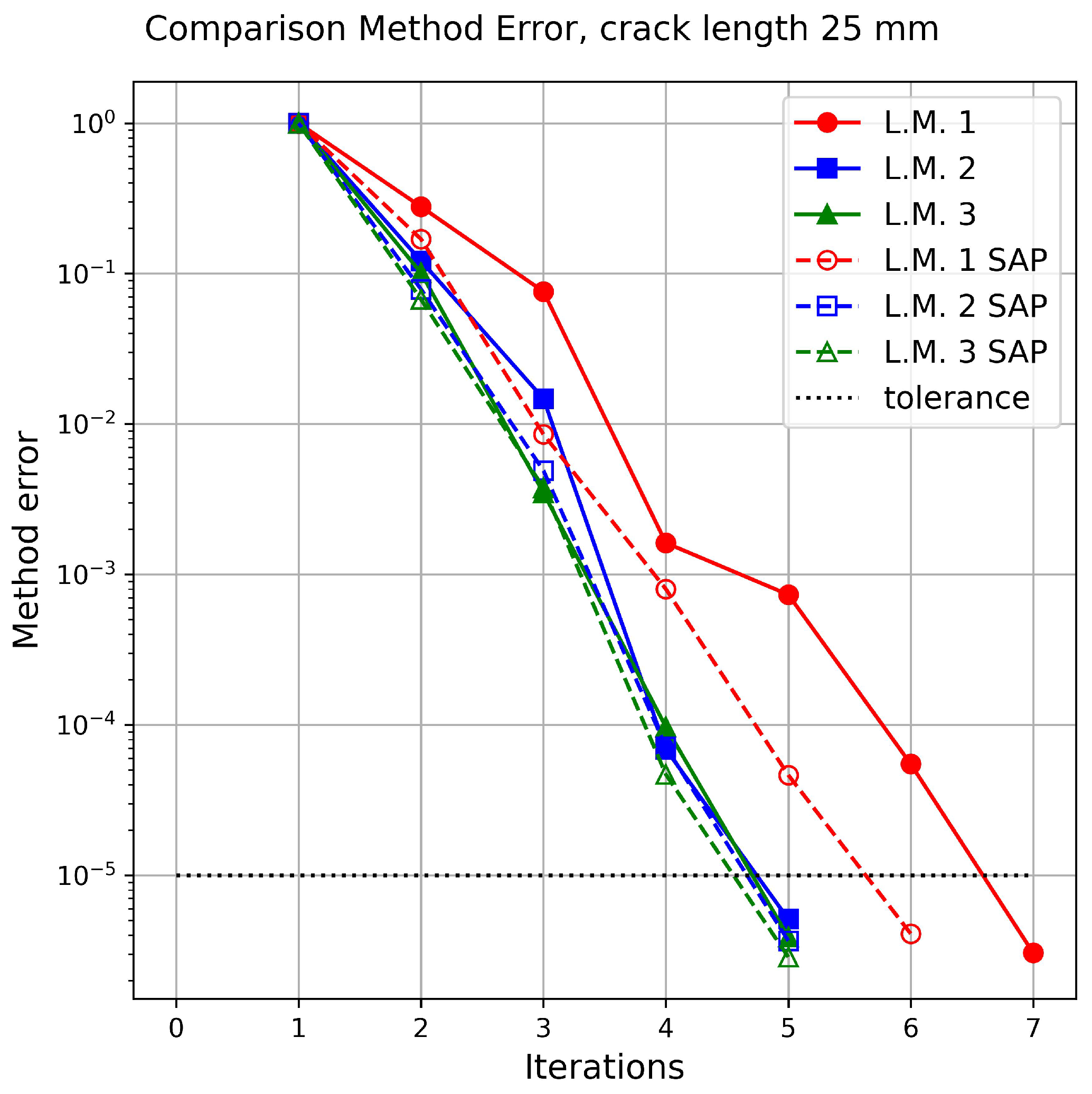
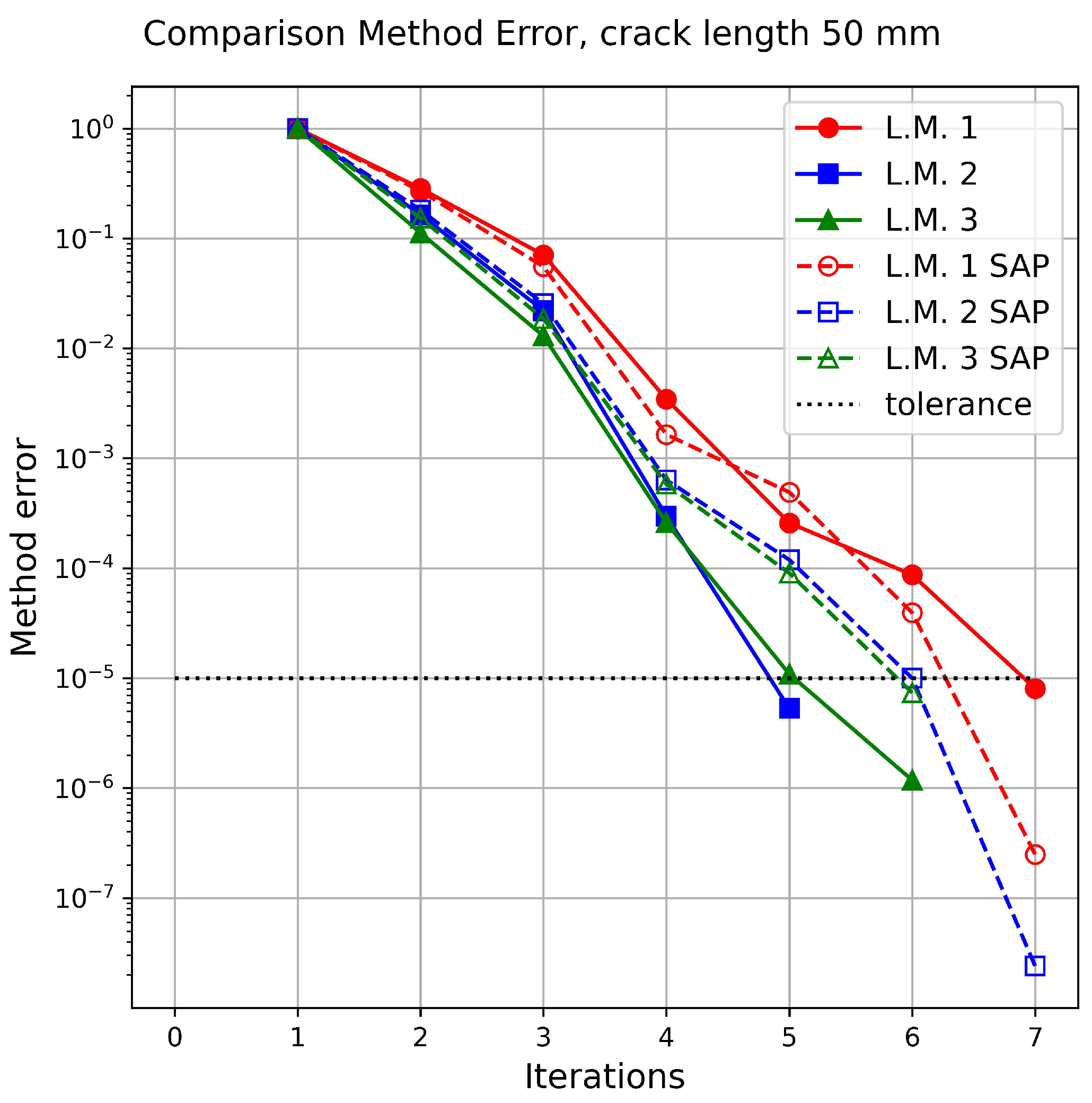
3.2. Effect of the Local Model Size
- Stagnation of the solution: If the iterative analysis presents a divergent error (increasing with each iteration), jumps between an error greater than the tolerance, or does not converge within a maximum number of iterations, i.e., 50 iterations in the present study.
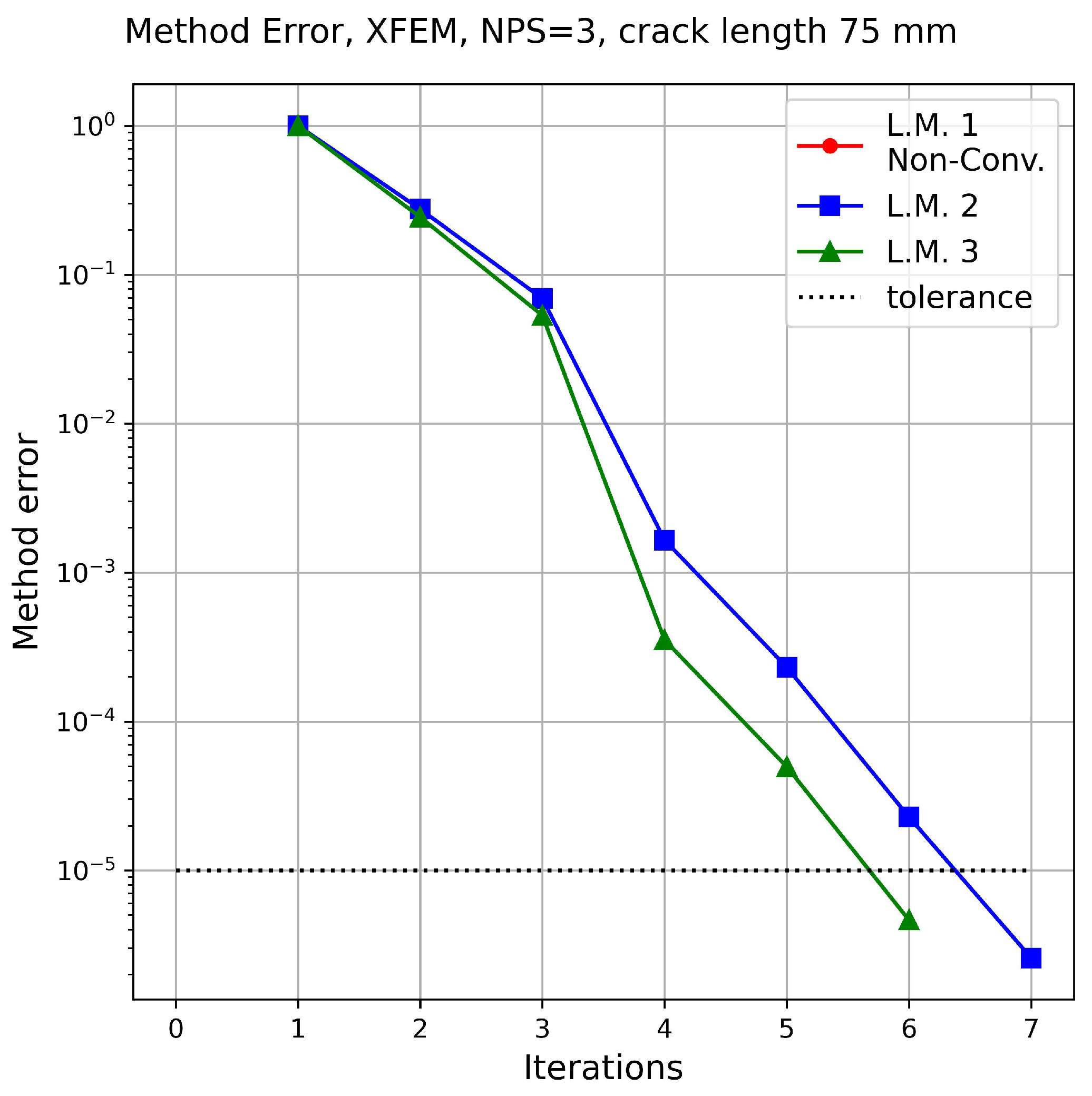
- Failed crack propagation analysis (XFEM internal procedure): Crack propagation in Code_Aster is calculated using the rate of energy release (G) method, using the built-in function . This method calculates the intensity stress factors (K) evaluating the bilinear form of G with the asymptotic solution of Westergaard. In addition, an error indicator is obtained by comparing the difference between G and Irwin’s energy release rate (), as shown in Equation (32) [46].If the error calculated using the Equation (32) is greater than 50%, the analysis stops and displays an alert message as presented in [46]. This is the case for the L.M.1 local mesh with the 75 mm initial crack length, affecting the convergence of XFEM method and, therefore, the overall convergence of the global–local analysis. More information with respect to the convergence of the XFEM crack propagation method can be found in [47,48].
4. Implementation with a Commercial Software
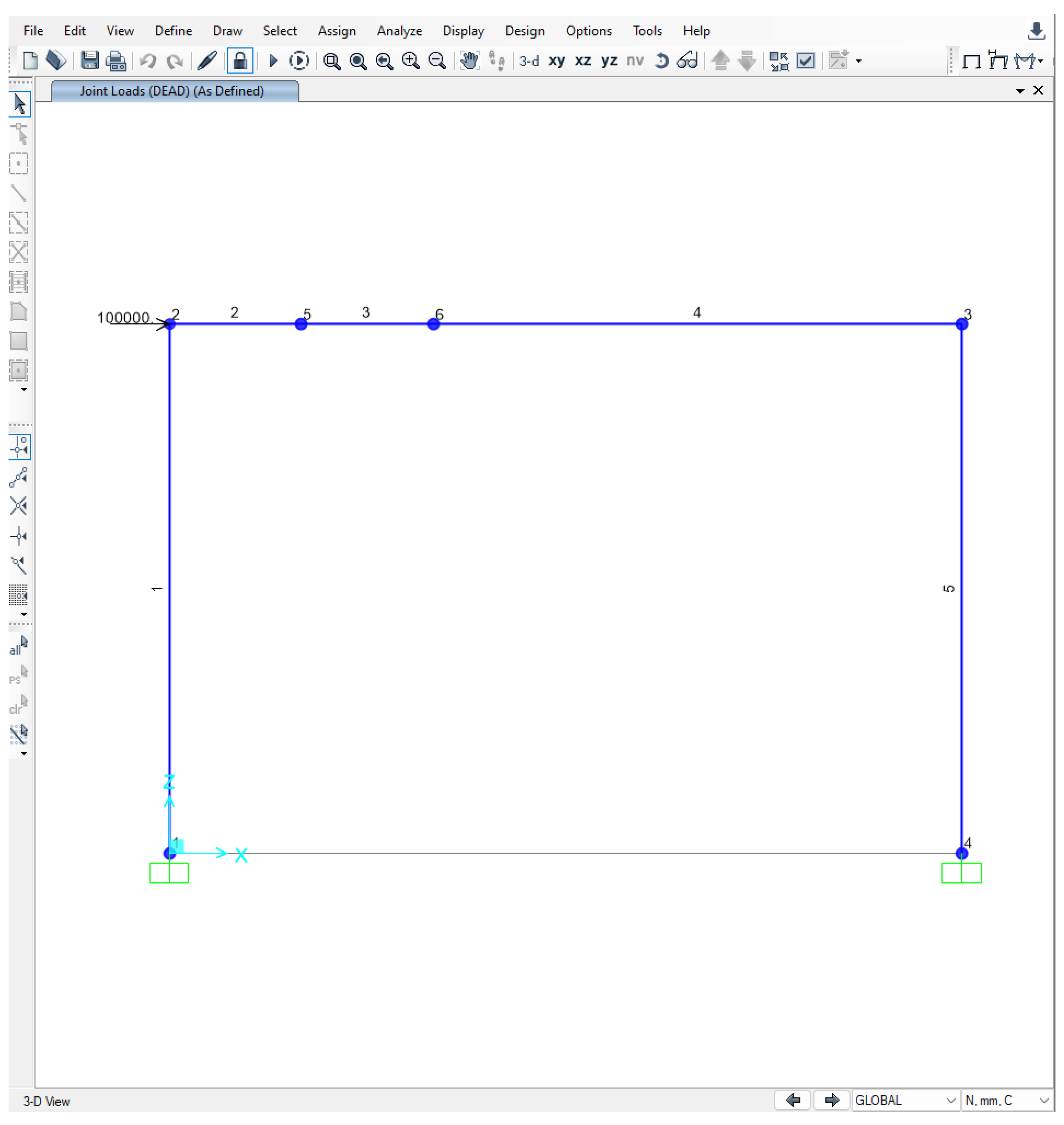
4.1. Validation of the Implementation in SAP 2000
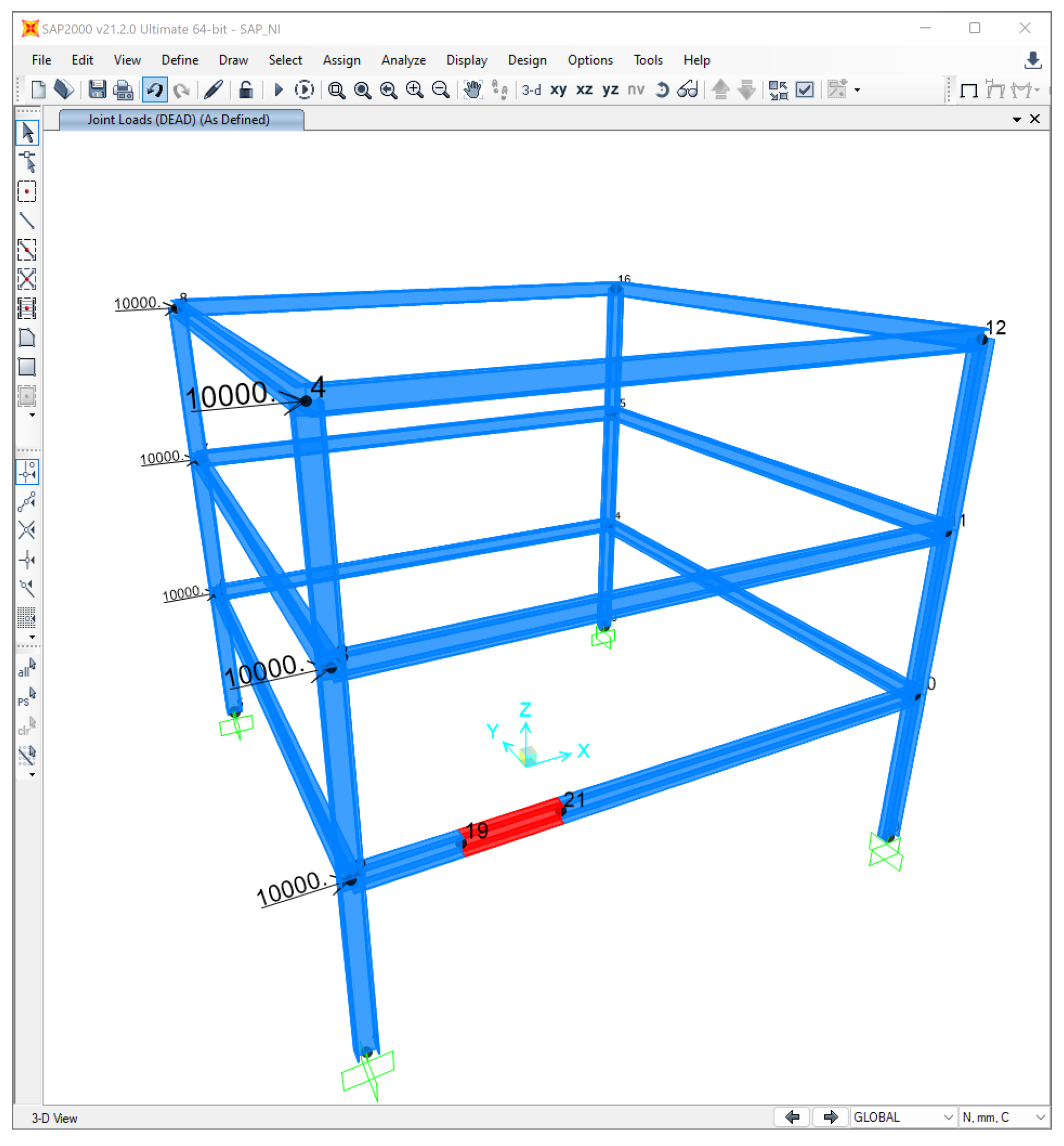
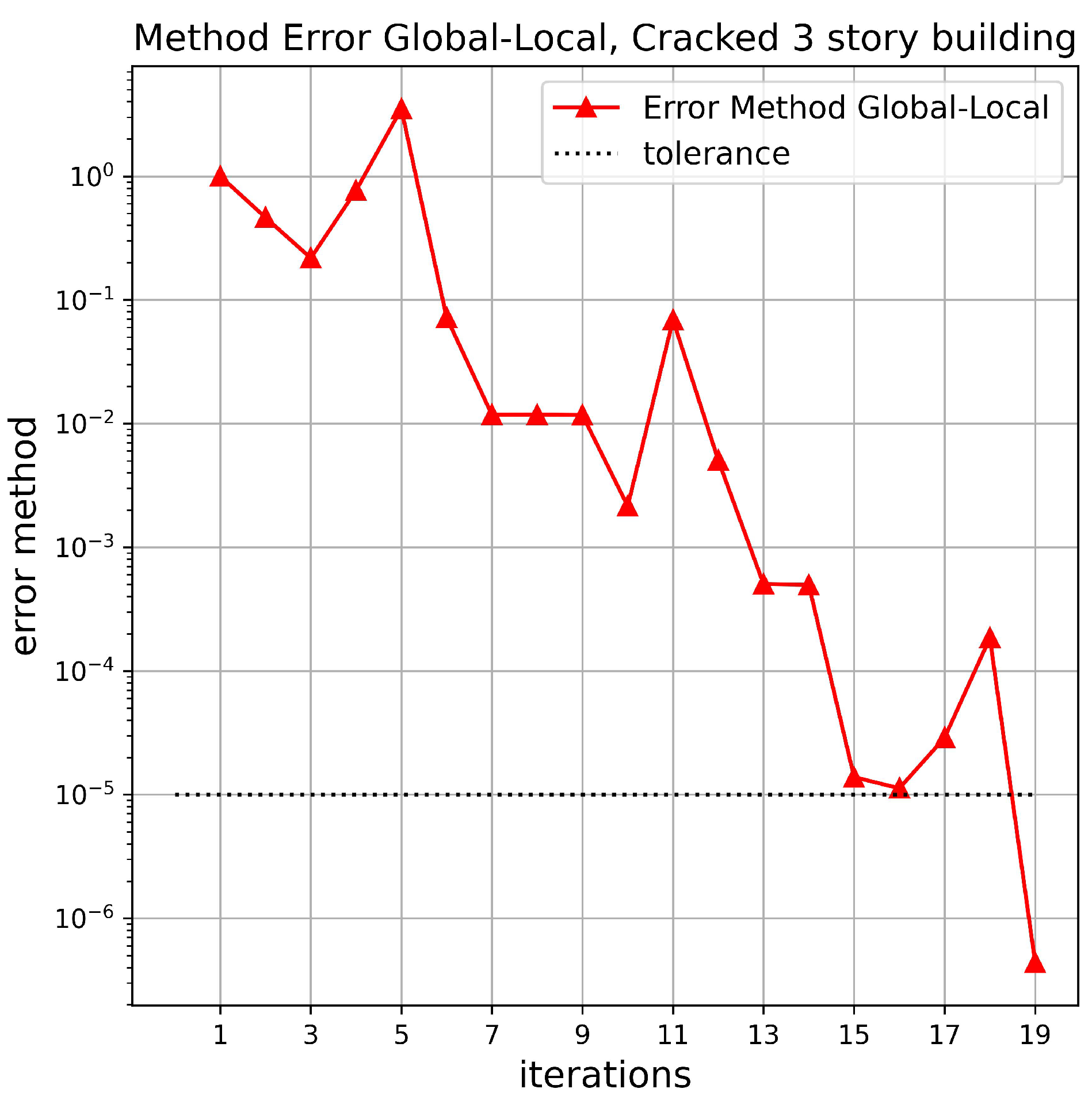
4.2. Methodology Extension to 3-Story Building
- Total height: H = 300 mm.
- Flange width: B = 200 mm.
- Flange thickness: tf = 10 mm.
- Web thickness: tw = 6 mm.
- Material: Grade 50 quality steel.
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- AISC Committee. Specification for Structural Steel Buildings (ANSI/AISC 360-10); American Institute of Steel Construction: Chicago, IL, USA, 2010. [Google Scholar]
- AISC Committee. Seismic Provision for Structural Steel Buildings (ANSI/AISC 341-16); American Institute of Steel Construction: Chicago, IL, USA, 2016. [Google Scholar]
- Frangopol, D.M.; Soliman, M. Life-cycle of structural systems: Recent achievements and future directions. Struct. Infrastruct. Eng. 2019, 12, 46–65. [Google Scholar]
- Cui, W. A state-of-the-art review on fatigue life prediction methods for metal structures. J. Mar. Sci. Technol. 2002, 7, 43–56. [Google Scholar] [CrossRef]
- Moës, N.; Dolbow, J.; Belytschko, T. A finite element method for crack growth without remeshing. Int. J. Numer. Methods Eng. 1999, 46, 131–150. [Google Scholar] [CrossRef]
- Belytschko, T.; Black, T. Elastic crack growth in finite elements with minimal remeshing. Int. J. Numer. Methods Eng. 1999, 45, 601–620. [Google Scholar] [CrossRef]
- Khoei, A.R. Extended Finite Element Method: Theory and Applications; John Wiley & Sons: New York, NY, USA, 2014. [Google Scholar]
- Erkmen, R.E.; Saleh, A.; Afnani, A. Incorporating local effects in the predictor step of the iterative global-local analysis of beams. Int. J. Multiscale Comput. Eng. 2016, 14, 455–477. [Google Scholar] [CrossRef]
- Valipour, H.R.; Foster, S.J. Nonlocal Damage Formulation for a Flexibility-Based Frame Element. J. Struct. Eng. 2009, 135, 1213–1221. [Google Scholar] [CrossRef]
- Roux, F.X. Method of finite element tearing and interconnecting and its parallel solution algorithm. Int. J. Numer. Methods Eng. 1991, 32, 1205–1227. [Google Scholar]
- Pebrel, J.; Rey, C.; Gosselet, P. A Nonlinear Dual-Domain Decomposition Method: Application to Structural Problems with Damage. Int. J. Multiscale Comput. Eng. 2008, 6, 251–262. [Google Scholar] [CrossRef]
- Hinojosa, J.; Allix, O.; Guidault, P.A.; Cresta, P. Domain decomposition methods with nonlinear localization for the buckling and post-buckling analyses of large structures. Adv. Eng. Softw. 2014, 70, 13–24. [Google Scholar] [CrossRef]
- Guidault, P.A. Une Stratégie de Calcul pour les Structures Fissurées: Analyse Locale-Globale et Approche Multiéchelle Pour la Fissuration. Ph.D. Thesis, École Normale Supérieure de Cachan-ENS Cachan, Gif-sur-Yvette, France, 2007. [Google Scholar]
- Kerfriden, P.; Allix, O.; Gosselet, P. A three-scale domain decomposition method for the 3D analysis of debonding in laminates. Comput. Mech. 2009, 44, 343–362. [Google Scholar] [CrossRef]
- Oumaziz, P.; Gosselet, P.; Boucard, P.A.; Guinard, S. A non-invasive implementation of a mixed domain decomposition method for frictional contact problems. Comput. Mech. 2017, 60, 797–812. [Google Scholar] [CrossRef]
- Allix, O.; Gosselet, P. Non intrusive global/local coupling techniques in solid mechanics: An introduction to different coupling strategies and acceleration techniques. In Modeling in Engineering Using Innovative Numerical Methods for Solids and Fluids; Springer: Berlin/Heidelberg, Germany, 2020; pp. 203–220. [Google Scholar]
- Whitcomb, J.D. Iterative global/local finite element analysis. Comput. Struct. 1991, 40, 1027–1031. [Google Scholar] [CrossRef]
- Gendre, L.; Allix, O.; Gosselet, P.; Comte, F. Non-intrusive and exact global/local techniques for structural problems with local plasticity. Comput. Mech. 2009, 44, 233–245. [Google Scholar] [CrossRef]
- Duval, M.; Passieux, J.C.; Salaün, M.; Guinard, S. Non-intrusive Coupling: Recent Advances and Scalable Nonlinear Domain Decomposition. Arch. Comput. Methods Eng. 2016, 23, 17–38. [Google Scholar] [CrossRef]
- Gosselet, P.; Blanchard, M.; Allix, O.; Guguin, G. Non-invasive global–local coupling as a Schwarz domain decomposition method: Acceleration and generalization. Adv. Model. Simul. Eng. Sci. 2018, 5, 4. [Google Scholar] [CrossRef]
- Fuenzalida-Henriquez, I.; Oumaziz, P.; Castillo-Ibarra, E.; Hinojosa, J. Global-Local non intrusive analysis with robin parameters: Application to plastic hardening behavior and crack propagation in 2D and 3D structures. Comput. Mech. 2022, 69, 965–978. [Google Scholar] [CrossRef]
- EDF. Code Aster, Analysis of Structures and Thermomechanics for Studies and Research; Électricité de France: Paris, France, 2019. [Google Scholar]
- Nayak, C.B.; Thakare, S.B. Seismic performance of existing water tank after condition ranking using non-destructive testing. Int. J. Adv. Struct. Eng. 2019, 11, 395–410. [Google Scholar] [CrossRef]
- dos Santos, R.B.; Tamayo, J.L.P. Coupling SAP 2000 with ABC algorithm for truss optimization. DYNA 2020, 87, 102–111. [Google Scholar] [CrossRef]
- Zandi, N.; Adlparvar, M.R.; Javan, A.L. Evaluation on Seismic Performance of Dual Steel Moment-Resisting Frame with Zipper Bracing System Compared to Chevron Bracing System Against Near-Fault Earthquakes. J. Rehabil. Civ. Eng. 2021, 9, 1–25. [Google Scholar] [CrossRef]
- Tampubolon, S.P.; Mulyani, A.S. Analysis and calculation of wooden framework structure by using Structural Analysis Program (SAP)-2000 and method of joint. IOP Conf. Ser. Earth Environ. Sci. 2021, 878, 012042. [Google Scholar] [CrossRef]
- Zhang, Y.; Madenci, E.; Zhang, Q. ANSYS implementation of a coupled 3D peridynamic and finite element analysis for crack propagation under quasi-static loading. Eng. Fract. Mech. 2022, 260, 108179. [Google Scholar] [CrossRef]
- Fageehi, Y.A. Fatigue Crack Growth Analysis with Extended Finite Element for 3D Linear Elastic Material. Metals 2021, 11, 397. [Google Scholar] [CrossRef]
- Alshoaibi, A.M.; Fageehi, Y.A. 3D modelling of fatigue crack growth and life predictions using ANSYS. Ain Shams Eng. J. 2022, 13, 101636. [Google Scholar] [CrossRef]
- Su, X.; Yang, Z.; Liu, G. Finite Element Modelling of Complex 3D Static and Dynamic Crack Propagation by Embedding Cohesive Elements in Abaqus. Acta Mech. Solida Sin. 2010, 23, 271–282. [Google Scholar] [CrossRef]
- Molnár, G.; Gravouil, A.; Seghir, R.; Réthoré, J. An open-source Abaqus implementation of the phase-field method to study the effect of plasticity on the instantaneous fracture toughness in dynamic crack propagation. Comput. Methods Appl. Mech. Eng. 2020, 365, 113004. [Google Scholar] [CrossRef]
- Távara, L.; Moreno, L.; Paloma, E.; Mantič, V. Accurate modelling of instabilities caused by multi-site interface-crack onset and propagation in composites using the sequentially linear analysis and Abaqus. Compos. Struct. 2019, 225, 110993. [Google Scholar] [CrossRef]
- Gontarz, J.; Podgórski, J. Comparison of Various Criteria Determining the Direction of Crack Propagation Using the UDMGINI User Procedure Implemented in Abaqus. Materials 2021, 14, 3382. [Google Scholar] [CrossRef]
- Navidtehrani, Y.; Betegón, C.; Martínez-Pañeda, E. A simple and robust Abaqus implementation of the phase field fracture method. Appl. Eng. Sci. 2021, 6, 100050. [Google Scholar] [CrossRef]
- Noii, N.; Aldakheel, F.; Wick, T.; Wriggers, P. An adaptive global–local approach for phase-field modeling of anisotropic brittle fracture. Comput. Methods Appl. Mech. Eng. 2020, 361, 112744. [Google Scholar] [CrossRef]
- Passieux, J.C.; Réthoré, J.; Gravouil, A.; Baietto, M.C. Local / global non-intrusive crack propagation simulation using a multigrid X-FEM solver. Comput. Mech. 2013, 52, 1381–1393. [Google Scholar] [CrossRef]
- Blanchard, M.; Allix, O.; Gosselet, P.; Desmeure, G. Space/time global/local noninvasive coupling strategy: Application to viscoplastic structures. Finite Elem. Anal. Des. 2019, 156, 1–12. [Google Scholar] [CrossRef]
- El Kerim, A.; Gosselet, P.; Magoulès, F. Asynchronous global–local non-invasive coupling for linear elliptic problems. Comput. Methods Appl. Mech. Eng. 2023, 406, 115910. [Google Scholar] [CrossRef]
- Magoulès, F.; Gbikpi-Benissan, G. JACK: An asynchronous communication kernel library for iterative algorithms. J. Supercomput. 2017, 73, 3468–3487. [Google Scholar] [CrossRef]
- Negrello, C.; Gosselet, P.; Rey, C. A new impedance accounting for short- and long-range effects in mixed substructured formulations of nonlinear problems. Int. J. Numer. Methods Eng. 2018, 114, 675–693. [Google Scholar] [CrossRef]
- Gendre, L.; Allix, O.; Gosselet, P. A two-scale approximation of the Schur complement and its use for non-intrusive coupling. Int. J. Numer. Methods Eng. 2011, 87, 889–905. [Google Scholar] [CrossRef]
- Peña, L.; Hinojosa, J. Implementation of a new expression for the search direction in simulations of structures with buckling and post-buckling: “Two-Scale Impedance”. J. Comput. Appl. Math. 2022, 403, 113799. [Google Scholar] [CrossRef]
- Aldakheel, F.; Noii, N.; Wick, T.; Wriggers, P. A global–local approach for hydraulic phase-field fracture in poroelastic media. Comput. Math. Appl. 2021, 91, 99–121. [Google Scholar] [CrossRef]
- Crisfield, M.A. A Fast Incremental/Iterative Solution Procedure That Handles “Snap-Through”; Computers and Structures: Walnut Creek, CA, USA, 1981. [Google Scholar] [CrossRef]
- Oñate, E. Structural Analysis with the Finite Element Method Linear Statics; Lecture Notes on Numerical Methods in Engineering and Sciences; Springer: Dordrecht, The Netherlands, 2013. [Google Scholar] [CrossRef]
- EDF. Code Aster, Manuel d’Utilisation Opérateur CALC G; Électricité de France: Paris, France, 2019. [Google Scholar]
- Lan, M.; Waisman, H.; Harari, I. A direct analytical method to extract mixed-mode components of strain energy release rates from Irwin’s integral using extended finite element method. Int. J. Numer. Methods Eng. 2013, 95, 1033–1052. [Google Scholar] [CrossRef]
- Sun, C.T.; Wang, C.Y. A new look at energy release rate in fracture mechanics. Int. J. Fract. 2002, 113, 295–307. [Google Scholar] [CrossRef]
- Computers & Structures, Inc. SAP2000, Modelado y Calculo de Estructuras a Traves de Elementos Finitos; Computers & Structures, Inc.: Walnut Creek, CA, USA, 2022. [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Local Mesh Model | Initial Crack Length in the Local Model | ||||
|---|---|---|---|---|---|
| Linear | 25 mm | 50 mm | 75 mm | ||
| Local Mesh 1 | % disp. error | 6.35% | 5.96% | 5.91% | non conv. |
| Local Mesh 2 | % disp. error | 6.44% | 5.93% | 5.91% | 6.62% |
| Local Mesh 3 | % disp. error | 6.39% | 5.95% | 5.98% | 6.44% |
| Local Mesh Model | Initial Crack Length in the Local Model | ||||
|---|---|---|---|---|---|
| Linear | 25 mm | 50 mm | 75 mm | ||
| Local Mesh 1 | % error disp. | 8.94% | 8.41% | 8.32% | non conv. |
| Local Mesh 2 | % error disp. | 8.87% | 8.33% | 8.32% | 9.11% |
| Local Mesh 3 | % error disp. | 8.79% | 8.32% | 8.37% | non conv. |
| Model | Crack Tip Displ. (mm) | Execution Time (s) |
|---|---|---|
| 3D Monolithic | 6.01 | 2231 |
| GL w/SAP 2000 | 5.89 | 391 |
| Diff. r/Monolithic | 1.6% | 82% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaque-Zurita, M.; Hinojosa, J.; Fuenzalida-Henríquez, I. Global–Local Non Intrusive Analysis with 1D to 3D Coupling: Application to Crack Propagation and Extension to Commercial Software. Mathematics 2023, 11, 2540. https://doi.org/10.3390/math11112540
Jaque-Zurita M, Hinojosa J, Fuenzalida-Henríquez I. Global–Local Non Intrusive Analysis with 1D to 3D Coupling: Application to Crack Propagation and Extension to Commercial Software. Mathematics. 2023; 11(11):2540. https://doi.org/10.3390/math11112540
Chicago/Turabian StyleJaque-Zurita, Matías, Jorge Hinojosa, and Ignacio Fuenzalida-Henríquez. 2023. "Global–Local Non Intrusive Analysis with 1D to 3D Coupling: Application to Crack Propagation and Extension to Commercial Software" Mathematics 11, no. 11: 2540. https://doi.org/10.3390/math11112540