

Newton-Based Extremum Seeking for Dynamic Systems Using Kalman Filtering: Application to Anaerobic Digestion Process Control

 , , and
, , and
Abstract
:1. Introduction
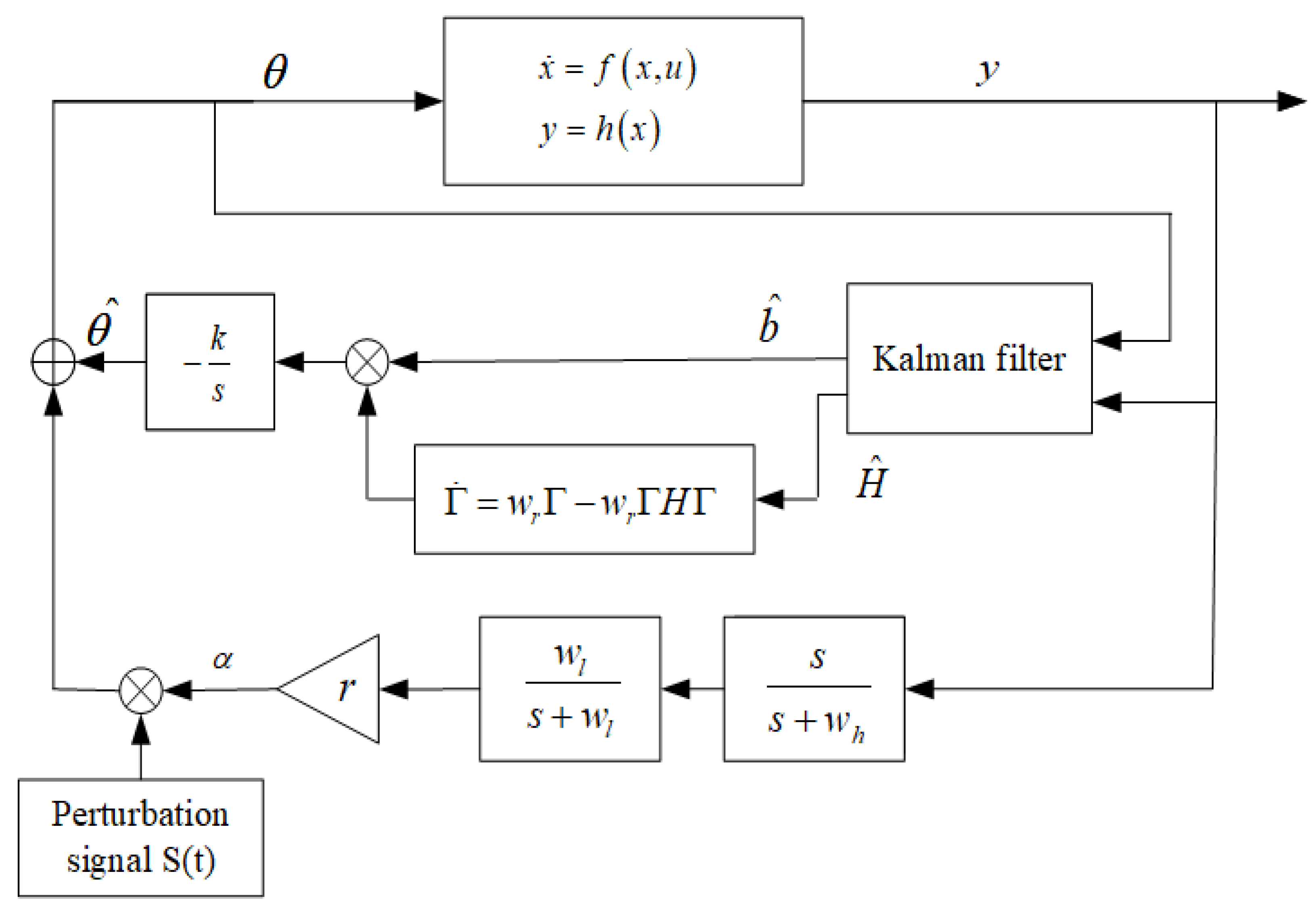
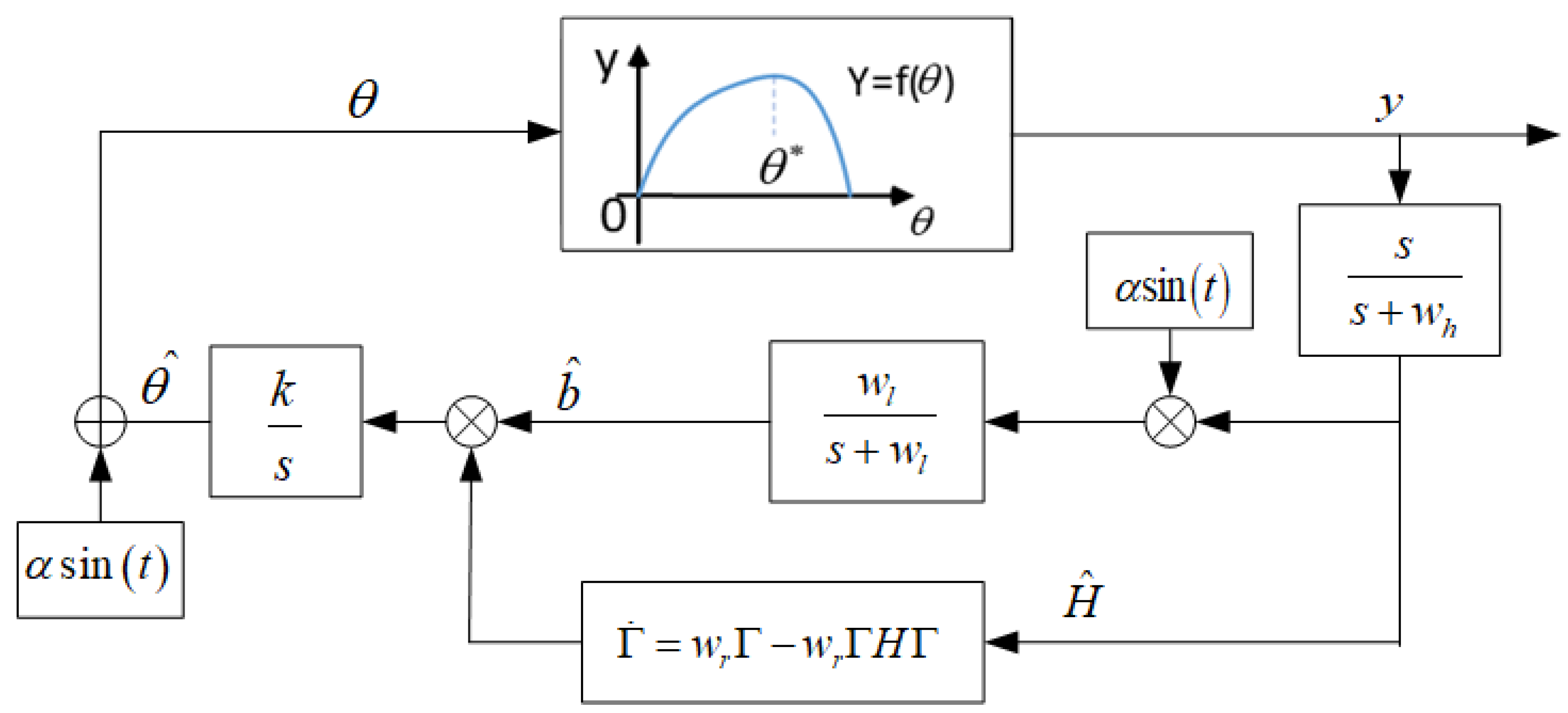
2. Extremum-Seeking Control for Dynamic Systems Using Newton Optimization and Kalman Filtering
- Assumption 1: There exists a smooth function such that
- Assumption 2: For each , the equilibrium of system (2) is exponentially stable uniformly in .
- Assumption 3: There exists such that:
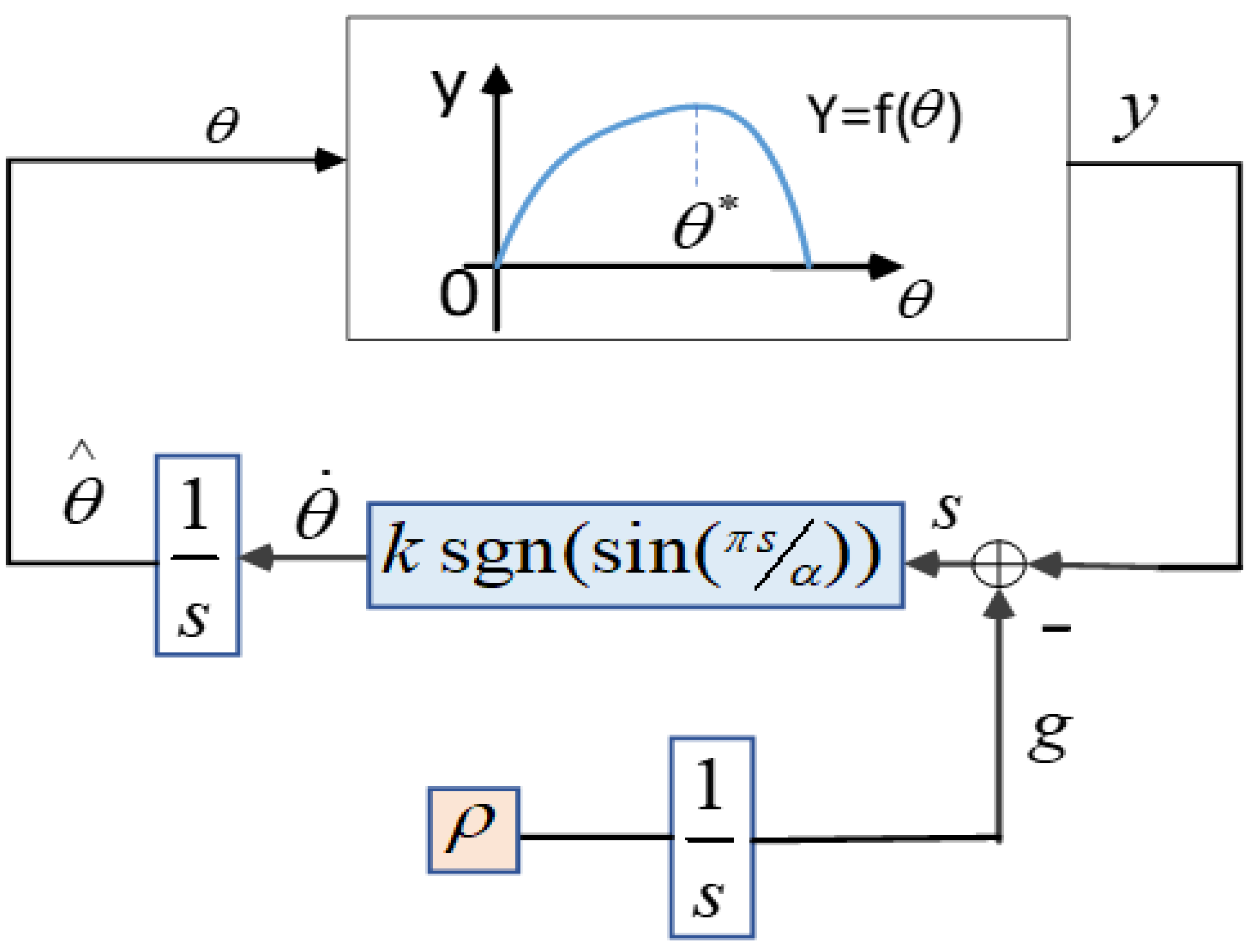
3. Convergence and Oscillation Attenuation Properties of the Closed-Loop System
4. Application to Two-Stage Anaerobic Digestion Process Control
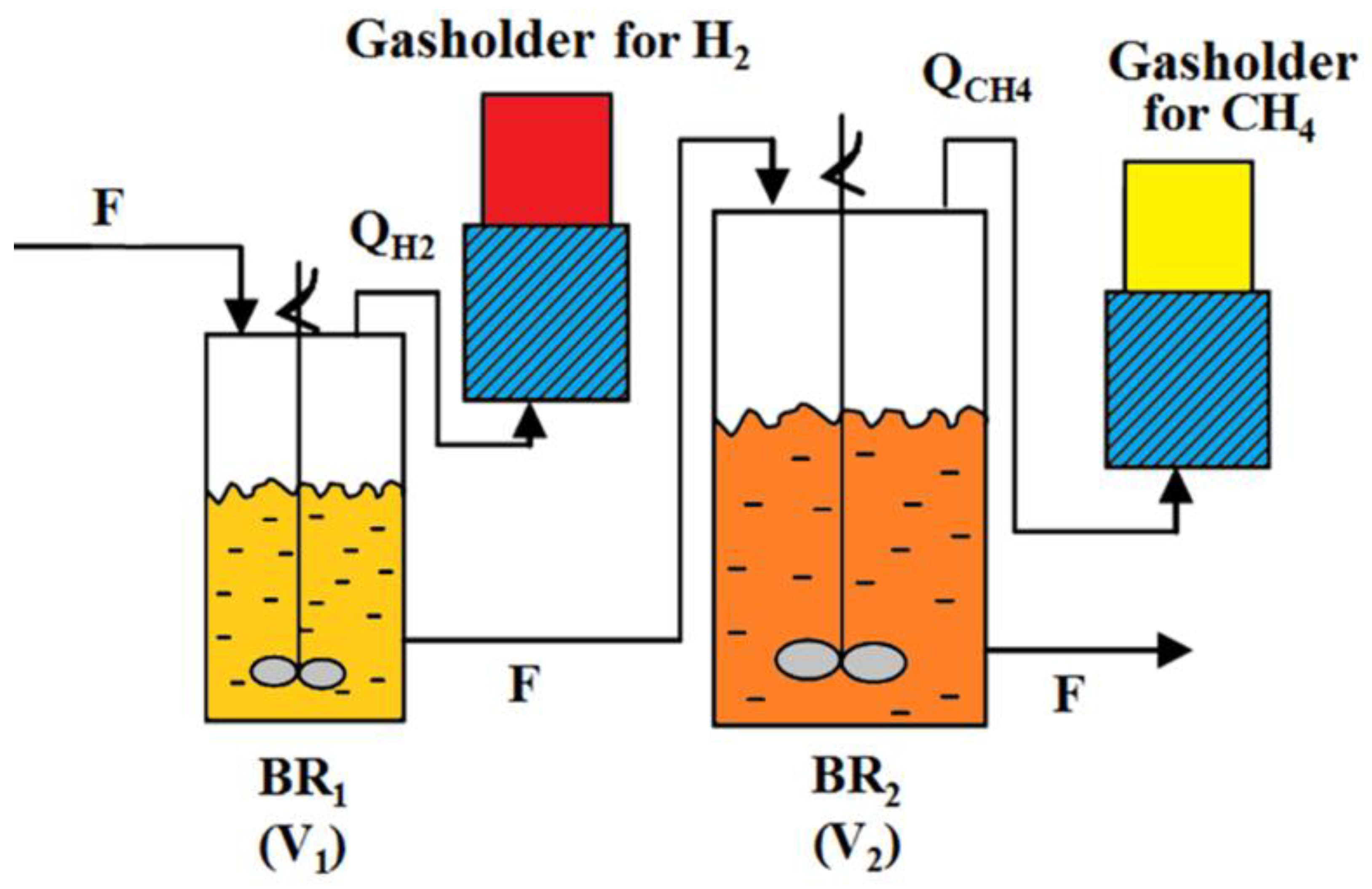
4.1. Process Description and Optimization Target
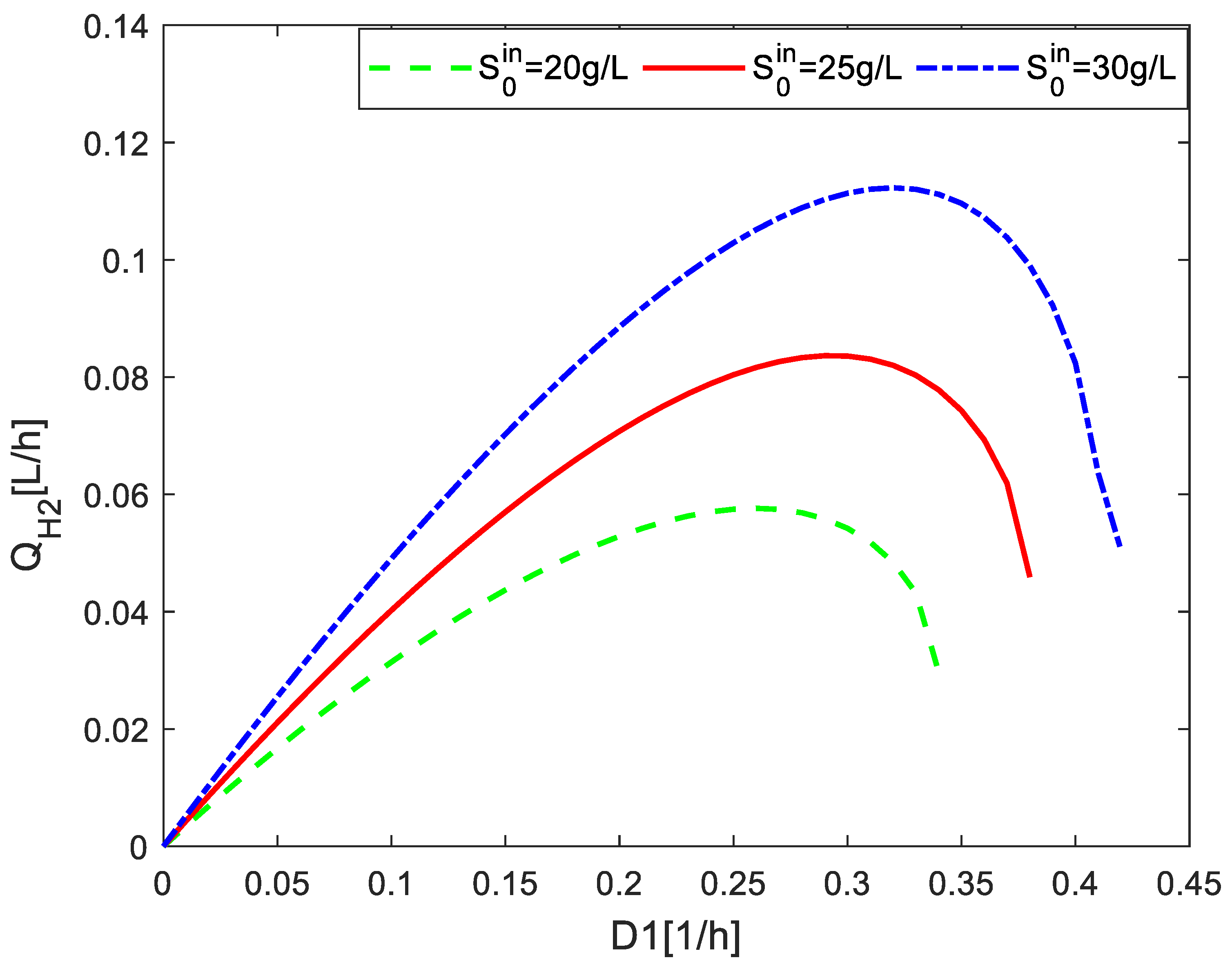
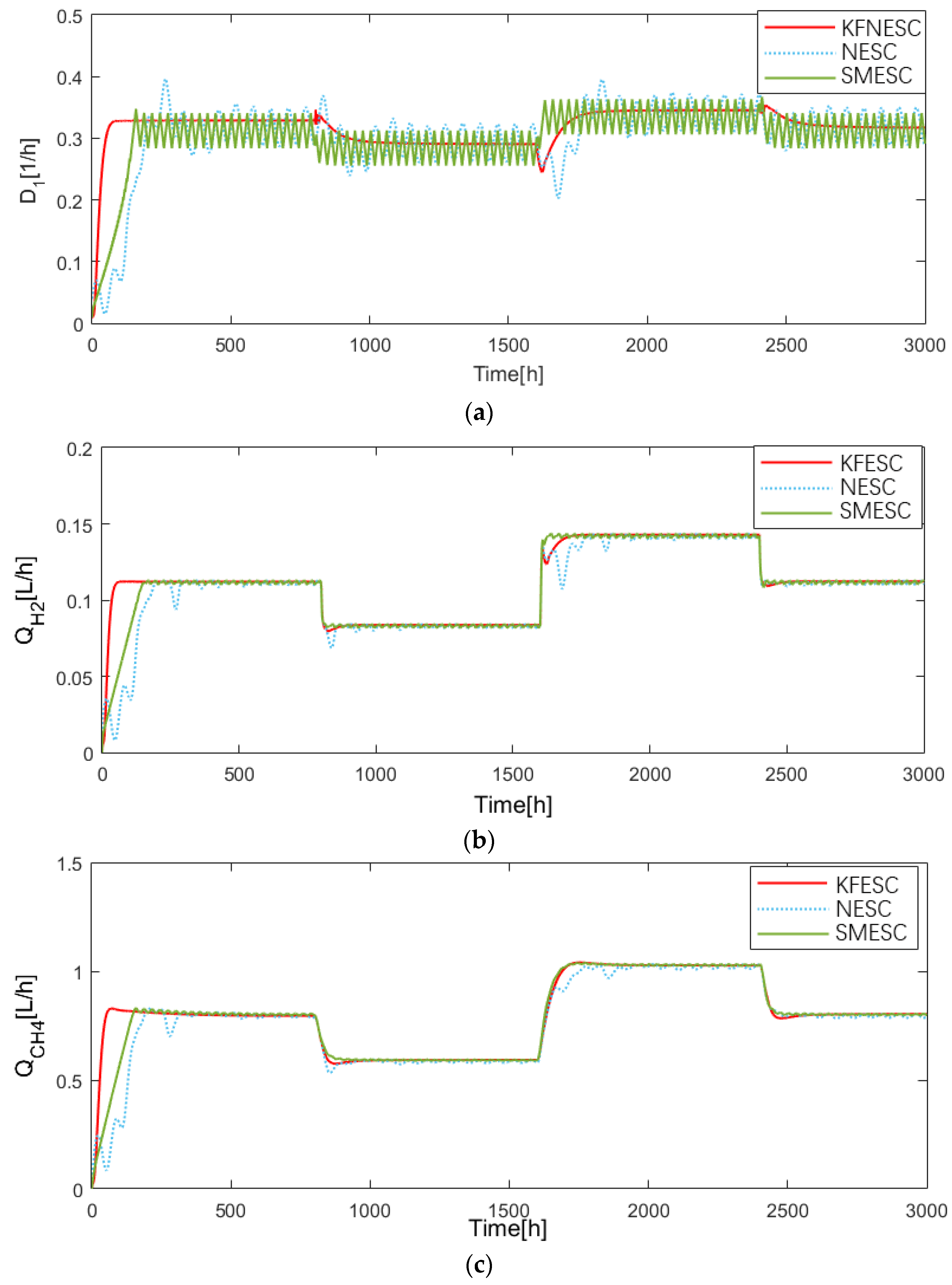
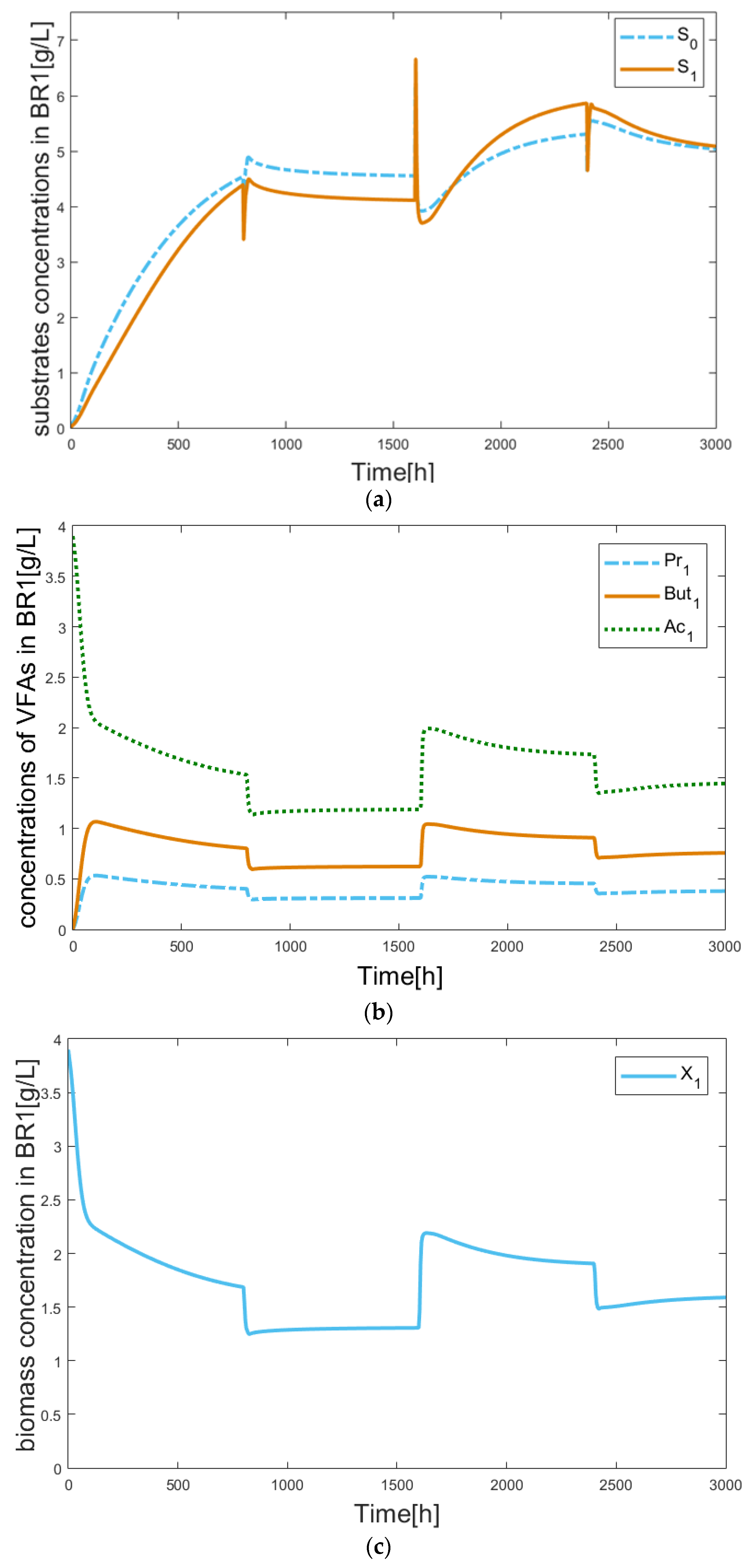
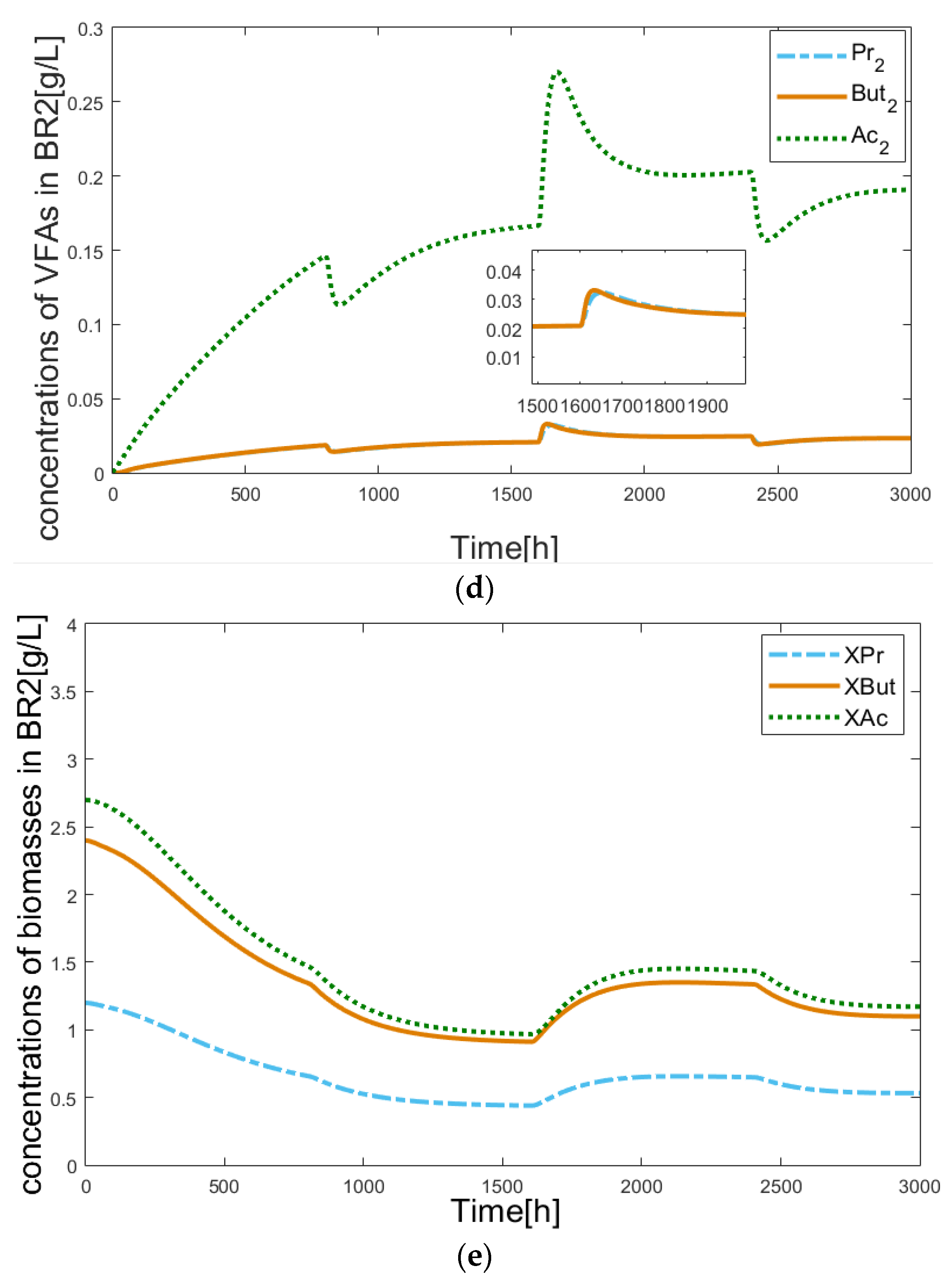
4.2. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, H.H.; Krstic, M. Extremum seeking for limit cycle minimization. In Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, NSW, Australia, 12–15 December 2000; Volume 3, pp. 2438–2442. [Google Scholar]
- Ariyur, K.B.; Krstic, M. Analysis and design of multivariable extremum seeking. In Proceedings of the 2002 American Control Conference, Anchorage, AK, USA, 8–10 May 2002; Volume 4, pp. 2903–2908. [Google Scholar]
- Ariyur, K.B.; Krstic, M. Slope seeking: A generalization of extremum seeking. Int. J. Adapt. Control. Signal Process. 2004, 18, 1–22. [Google Scholar] [CrossRef]
- Guay, M.; Dochain, D. A time-varying extremum-seeking control approach. Automatica 2015, 51, 356–363. [Google Scholar] [CrossRef]
- Ozgüner, U.; Fu, L. Variable structure extremum seeking control based on sliding mode gradient estimation for a class of nonlinear systems. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 8–13. [Google Scholar]
- Dincmen, E.T.; Acarman, B.G. Abs control algorithm via extremum seeking method with enhanced lateral stability. IFAC Proc. Vol. 2010, 43, 19–24. [Google Scholar] [CrossRef]
- Binetti, P.; Ariyur, K.B.; Krstic, M.; Bernelli, F. Formation flight optimization using extremum seeking feedback. J. Guid. Control. Dyn. 2003, 26, 132–142. [Google Scholar] [CrossRef] [Green Version]
- Atta, K.T.; Johansson, A.; Gustafsson, T. On-Line Optimization of Cone Crushers using Extremum-Seeking Control. In Proceedings of the IEEE International Conference on Control Technology and Applications, Hyderabad, India, 28–30 August 2013; pp. 1054–1060. [Google Scholar]
- Simeonov, I.; Noykova, N.; Gyllenberg, M. Identification and extremum seeking control of the anaerobic digestion of organic wastes. Cybern. Inf. Technol. 2007, 7, 73–84. [Google Scholar]
- Pan, Y.; Özgüner, Ü.; Acarman, T. Stability and performance improvement of extremum seeking control with sliding mode. Int. J. Control. 2003, 76, 968–985. [Google Scholar] [CrossRef]
- Moase, W.H.; Manzie, C.; Brear, M.J. Newton-like extremum-seeking for the control of thermoacoustic instability. IEEE Trans. Autom. Control. 2010, 55, 2094–2105. [Google Scholar] [CrossRef]
- Nešić, D.; Tan, Y.; Moase, W.H.; Manzie, C. A unifying approach to extremum seeking: Adaptive schemes based on estimation of derivatives. In Proceedings of the IEEE Conference on Decision and Control, Atlanta, GA, USA, 15–17 December 2010; pp. 4625–4630. [Google Scholar]
- Ghaffari, A.; Krstić, M.; Nešić, D. Multivariable newton-based extremum seeking. Automatica 2012, 48, 1759–1767. [Google Scholar] [CrossRef]
- Salsbury, T.I.; Drees, K.H.; House, J.M.; Perez, C. Newton-Based Extremum-Seeking Control System. U.S. Patent US20200348635A1, 5 November 2020. [Google Scholar]
- Dewasme, L.; Srinivasan, B.; Perrier, M.; Vande Wouwer, A. Extremum-seeking algorithm design for fed-batch cultures of microorganisms with overflow metabolism. J. Process Control. 2011, 21, 1092–1104. [Google Scholar] [CrossRef]
- Chioua, M.; Srinivasan, B.; Guay, M.; Perrier, M. Performance improvement of extremum seeking control using recursive least square estimation with forgetting factor. IFAC-PapersOnLine 2016, 49, 424–429. [Google Scholar] [CrossRef]
- Dürr, H.B.; Krstić, M.; Scheinker, A.; Ebenbauer, C. Extremum seeking for dynamic maps using Lie brackets and singular perturbations. Automatica 2017, 83, 91–99. [Google Scholar] [CrossRef]
- Dürr, H.B.; Stanković, M.S.; Ebenbauer, C.; Johansson, K.H. Lie bracket approximation of extremum seeking systems. Automatica 2013, 49, 1538–1552. [Google Scholar] [CrossRef] [Green Version]
- Tan, Y.; Nešić, D.; Mareels, I.M.Y. On non-local stability properties of extremum seeking control. Automatica 2006, 42, 889–903. [Google Scholar] [CrossRef] [Green Version]
- Moase, W.H.; Tan, Y.; Nešić, D.; Manzie, C. Non-local stability of a multi-variable extremum-seeking scheme. In Proceedings of the 2011 Australian Control Conference, Melbourne, Australia, 10–11 November 2011; pp. 38–43. [Google Scholar]
- Tan, Y.; Nešić, D.; Mareels, I. On the choice of dither in extremum seeking systems: A case study. Automatica 2008, 44, 1446–1450. [Google Scholar] [CrossRef]
- Manzie, C.; Krstic, M. Extremum seeking with stochastic perturbations. IEEE Trans. Autom. Control. 2009, 54, 580–585. [Google Scholar] [CrossRef]
- Liu, S.-J.; Krstic, M. Newton-based stochastic extremum seeking. Automatica 2014, 50, 952–961. [Google Scholar] [CrossRef]
- Liu, S.-J.; Krstic, M. Stochastic Averaging and Stochastic Extremum Seeking; Communications and Control Engineering; Springer: London, UK, 2012. [Google Scholar]
- Yin, C.; Wu, S.; Zhou, S.; Cao, J.; Huang, X.; Cheng, Y. Design and stability analysis of multivariate extremum seeking with newton method. J. Frankl. Inst. 2018, 355, 1559–1578. [Google Scholar] [CrossRef]
- Moura, S.J.; Chang, Y.A. Lyapunov-based switched extremum seeking for photovoltaic power maximization. Control. Eng. Pract. 2013, 21, 971–980. [Google Scholar] [CrossRef]
- Wang, L.; Chen, S.; Ma, K. On stability and application of extremum seeking control without steady-state oscillation. Automatica 2016, 68, 18–26. [Google Scholar] [CrossRef]
- Zhang, L.; Hu, Y. Multi-parameter extremum seeking algorithm with amplitude tuned adaptively. Huazhong Keji Daxue Xuebao (Ziran Kexue Ban)/J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2016, 44, 53–57. [Google Scholar]
- Mu, B.; Li, Y.; Seem, J.E. Discrimination of steady state and transient state of dither extremum seeking control via sinusoidal detection. Mech. Syst. Signal Process. 2016, 76, 93–110. [Google Scholar] [CrossRef]
- Hun, L.C.; Yeng, O.L.; Sze, L.T.; Chet, K.V. Kalman Filtering and Its Real-Time Applications. In Real-Time Systems; IntechOpen: London, UK, 2016. [Google Scholar]
- Mandić, F.; Mišković, N. Tracking underwater target using extremum seeking. IFAC-PapersOnLine 2015, 48, 149–154. [Google Scholar] [CrossRef]
- Gurubel, K.; Sanchez, E.; Coronado, A.; Zúñga, V.; Sulbaran, B. Optimal neural control of a two stage anaerobic digestion model for biofuels production. In Proceedings of the IEEE International Joint Conference on Neural Networks, Rio de Janeiro, Brazil, 8–13 July 2018; pp. 265–271. [Google Scholar]
- Zaman, A.; Birk, W.; Atta, K.T.; Mortsell, M. Adaptive Decoupling of Multivariable Systems Using Extremum-Seeking Approach. In Proceedings of the 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7–10 September 2021. [Google Scholar]
- Gaida, D.; Wolf, C.; Bongards, M. Feed control of anaerobic digestion process for renewable energy production: A review. Renew. Sustain. Energy Rev. 2017, 68, 869–875. [Google Scholar] [CrossRef]
- Yin, C.; Dadras, S.; Huang, X.; Chen, Y.Q.; Zhong, S. Optimizing energy consumption for lighting control system via multivariate extremum seeking control with diminishing dither signal. IEEE Trans. Autom. Sci. Eng. 2009, 16, 1848–1859. [Google Scholar] [CrossRef]
- Speyer, J.L.; Chung, W.H. Stochastic Processes, Estimation, and Control; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2008. [Google Scholar]
- Weedermann, M.; Wolkowicz, G.; Sasara, J. Optimal biogas production in a model for anaerobic digestion. Nonlinear Dyn. 2015, 81, 1097–1112. [Google Scholar] [CrossRef]
- Sari, T.; Benyahia, B. The operating diagram for a two-step anaerobic digestion model. Nonlinear Dyn. 2021, 105, 2711–2737. [Google Scholar] [CrossRef]
- Moreno, J.A.; Besançon, G. On multi-valued observers for a class of single-valued systems. Automatica 2021, 123, 109334. [Google Scholar] [CrossRef]
- Chorukova, E.; Hubenov, V.; Gocheva, Y.; Simeonov, I. Two-Phase Anaerobic Digestion of Corn Steep Liquor in Pilot Scale Biogas Plant with Automatic Control System with Simultaneous Hydrogen and Methane Production. Appl. Sci. 2022, 12, 6274. [Google Scholar] [CrossRef]
- Ruggeri, B.; Tommasi, T.; Sanfilippo, S. BioH2 & BioCH4 through Anaerobic Digestion (From Research to Full-Scale Applications); Springer: London, UK, 2015; 215p. [Google Scholar]
- Krishnan, S.; Md Din, M.F.; Mat Taib, S.; Ee Ling, Y.; Puteh, H.; Mishra, P.; Nasrullah, M.; Sakinah, M.; Wahid, Z.A.; Rana, S.; et al. Process constraints in sustainable bio-hythane production from wastewater: Technical note. Bioresour. Technol. Rep. 2019, 5, 359–363. [Google Scholar] [CrossRef]
- Chorukova, E.; Simeonov, I.; Kabaivanova, L. Volumes Ratio Optimization in a Cascade Anaerobic Digestion System Producing Hydrogen and Methane. Ecol. Chem. Eng. S 2021, 28, 183–200. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.568 | 0.08 | ||
| 0.05 | 4.2 | ||
| 0.05 | 2.1 | ||
| 0.025 | 1.1 | ||
| 3.914 | 1.5 | ||
| 0.22 | 1.5 | ||
| 0.22 | 0.5 | ||
| 0.8 | 0.22 | ||
| 1 | 142 | ||
| 1 | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Y.; Pan, N.; Hu, M.; Wang, H.; Simeonov, I.; Kabaivanova, L.; Christov, N. Newton-Based Extremum Seeking for Dynamic Systems Using Kalman Filtering: Application to Anaerobic Digestion Process Control. Mathematics 2023, 11, 251. https://doi.org/10.3390/math11010251
Tian Y, Pan N, Hu M, Wang H, Simeonov I, Kabaivanova L, Christov N. Newton-Based Extremum Seeking for Dynamic Systems Using Kalman Filtering: Application to Anaerobic Digestion Process Control. Mathematics. 2023; 11(1):251. https://doi.org/10.3390/math11010251
Chicago/Turabian StyleTian, Yang, Ning Pan, Maobo Hu, Haoping Wang, Ivan Simeonov, Lyudmila Kabaivanova, and Nicolai Christov. 2023. "Newton-Based Extremum Seeking for Dynamic Systems Using Kalman Filtering: Application to Anaerobic Digestion Process Control" Mathematics 11, no. 1: 251. https://doi.org/10.3390/math11010251