
Adaptive Nonsingular Terminal Sliding Mode Control for Performance Improvement of Perturbed Nonlinear Systems

 , , , , and
, , , , and
Abstract
:1. Introduction
- (i)
- Design of a nonlinear sliding surface for stabilization of under-actuated nonlinear systems in the appearance of exterior perturbation with unknown bounds;
- (ii)
- Proposition of a non-singular terminal sliding surface for the convergence of a nonlinear sliding surface in the finite time;
- (iii)
- Employment of a nonlinear function in the sliding function for performance improvement of the closed-loop control system;
- (iv)
- Design of a barrier function adaptive scheme to satisfy the system’s robust performance against perturbation.
2. Problem Definition and Preliminaries
3. Main Results
3.1. Nonlinear SMC Surface
3.2. Non-Singular TSMC
3.3. Barrier-Function Adaptive Non-Singular TSMC
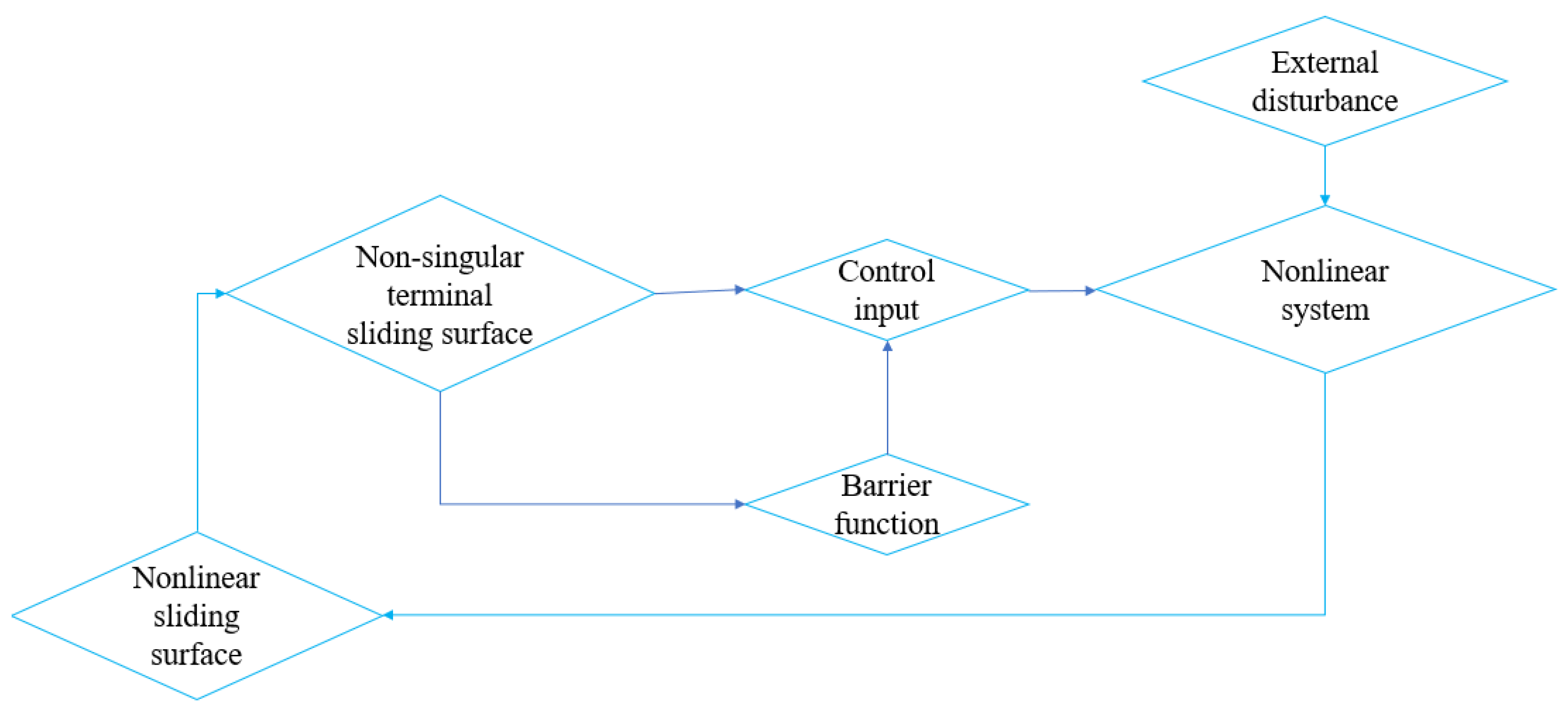
- (a)
- Firstly, the nonlinear system under external disturbance is defined;
- (b)
- Afterward, the nonlinear sliding surface based on the system states is defined for convergence of the system states to the origin;
- (c)
- Then, the nonsingular terminal sliding surface based on the nonlinear sliding surface is defined for fast convergence of the nonlinear sliding surface;
- (d)
- For rejection of the external disturbances, a barrier function is defined;
- (e)
- At last, the control input is achieved to enter to the nonlinear system for stability control of the system states;
- (f)
- This closed-loop control procedure is repeated at any moment.
4. Simulation Results
4.1. Introduction of Chaotic System
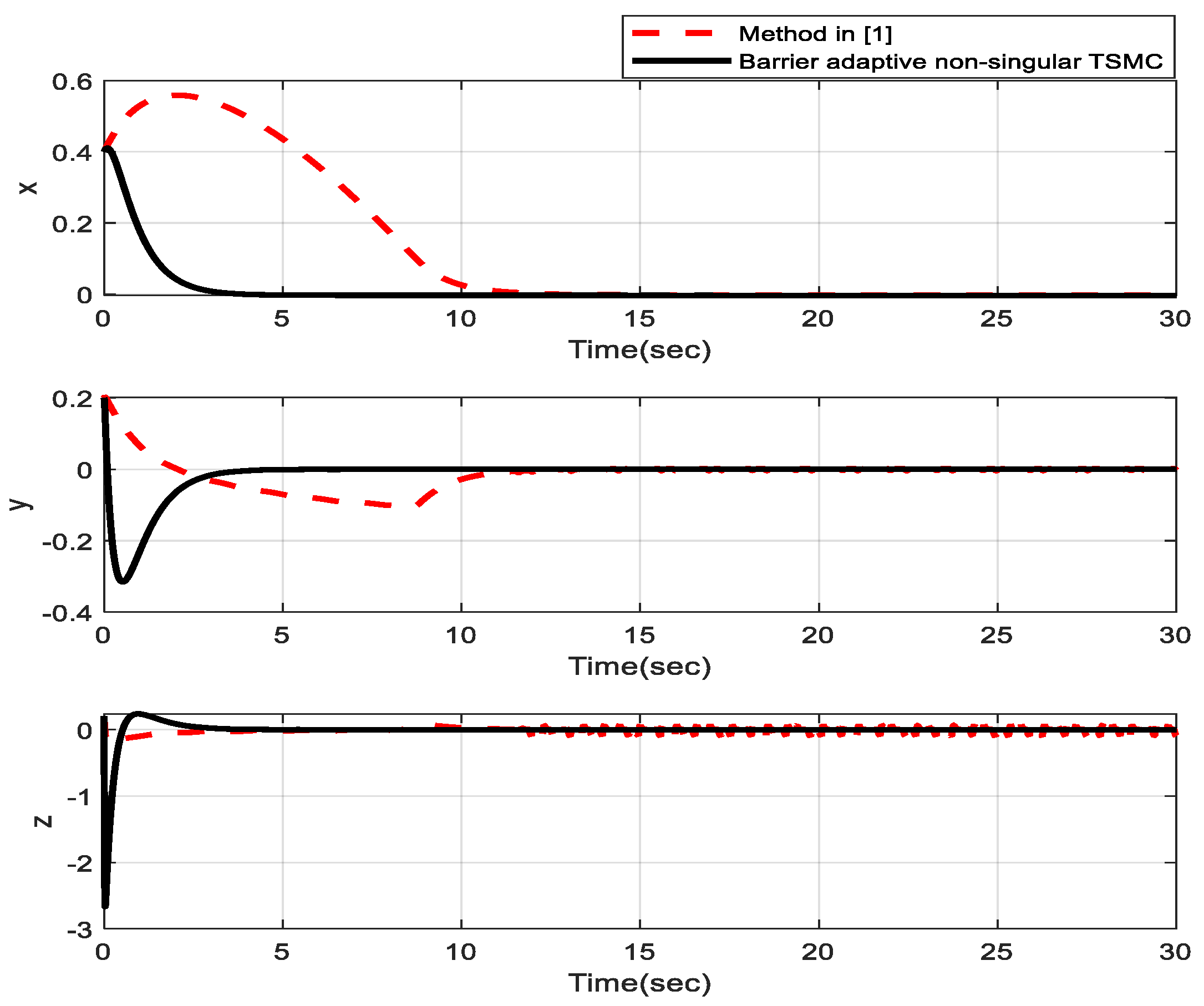
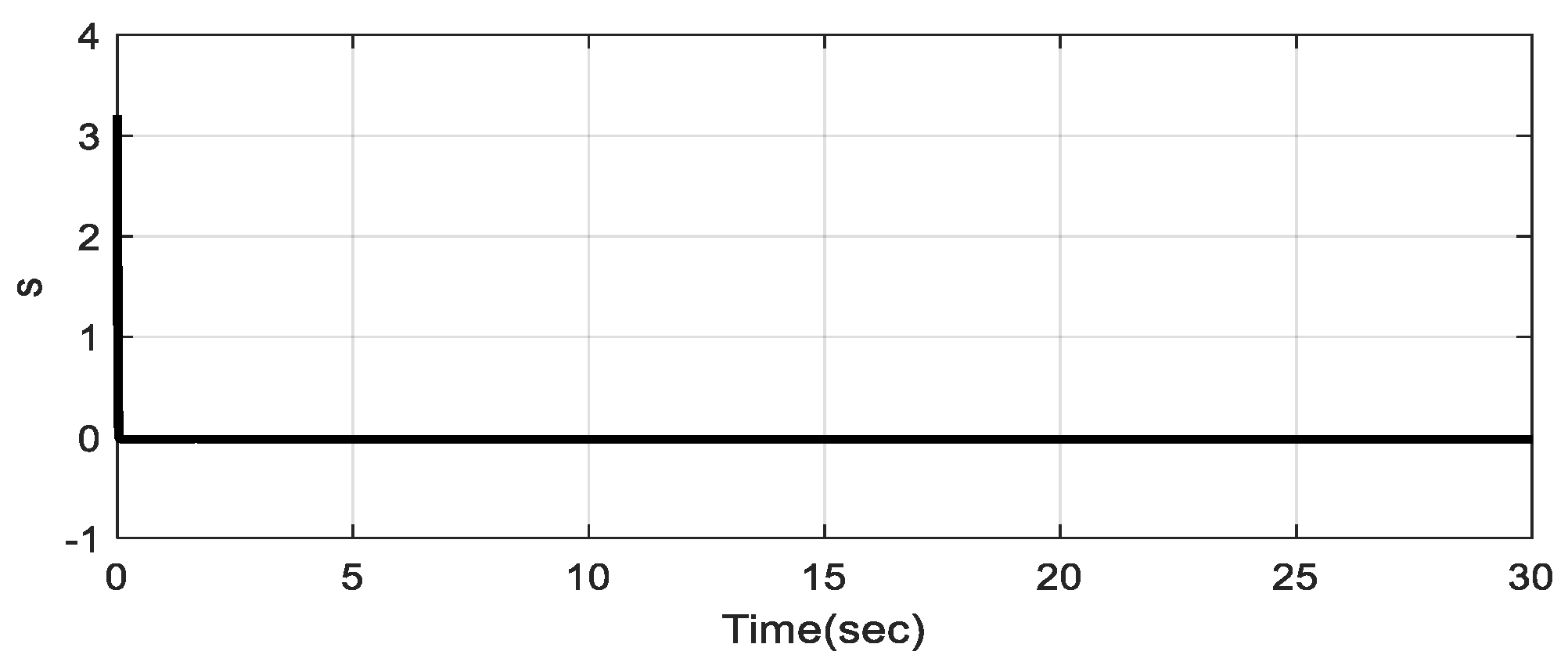
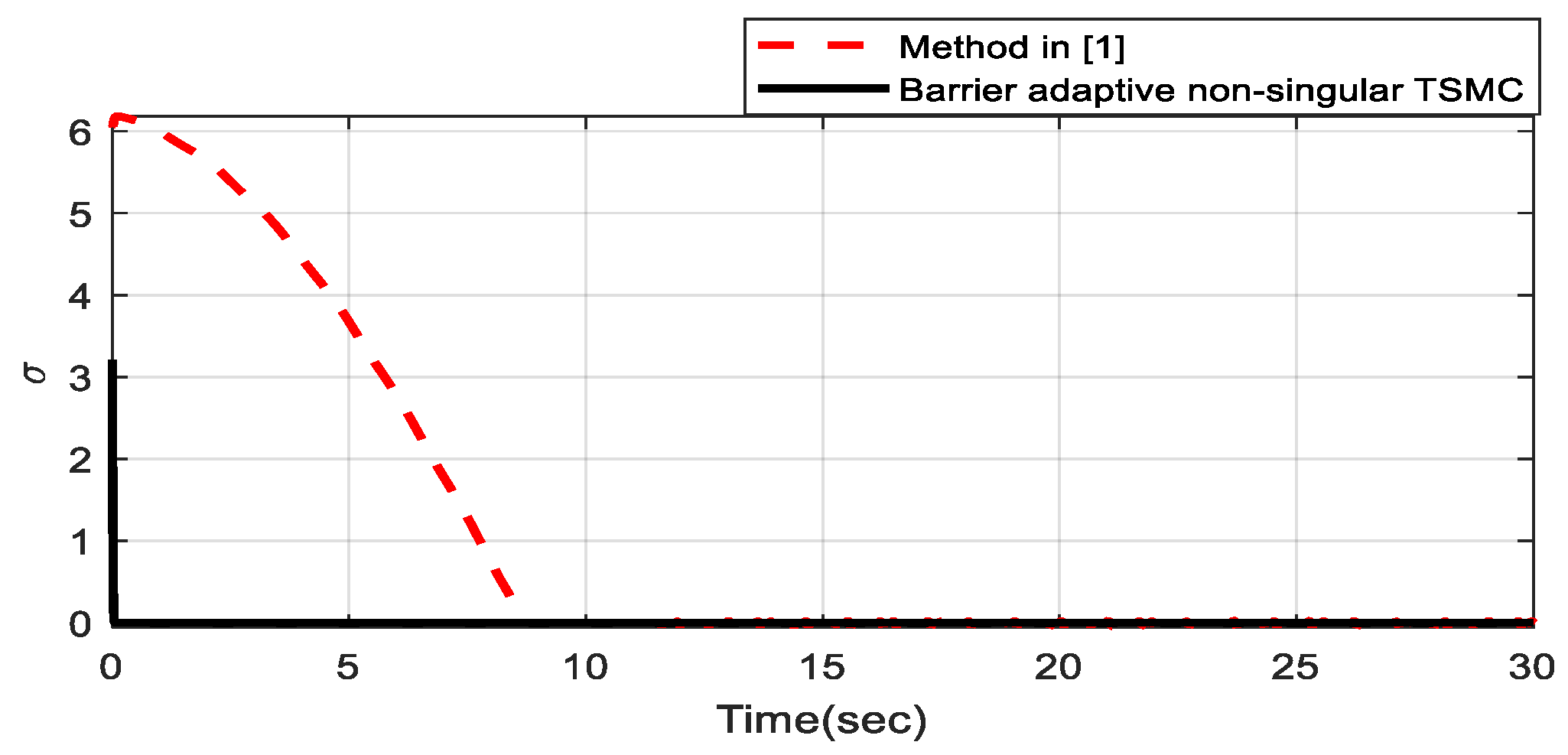
4.2. Simulation Results without Abrupt Change
4.3. Simulation Result in the Existence of Abrupt Change
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mamat, N.; Yakub, F.; Shaikh Salim, S.A.Z.; Mat Ali, M.S. Seismic vibration suppression of a building with an adaptive nonsingular terminal sliding mode control. J. Vib. Control 2020, 26, 2136–2147. [Google Scholar] [CrossRef]
- Li, H.; Xie, J.; Wei, W. Permutation entropy and Lyapunov exponent: Detecting and monitoring the chaotic edge of a closed planar under-actuated system. Mech. Syst. Signal Process. 2019, 123, 206–221. [Google Scholar] [CrossRef]
- Ebrahimi, S.; Shamloo, A.; Alishiri, M.; Mofrad, Y.M.; Akherati, F. Targeted pulmonary drug delivery in coronavirus disease (COVID-19) therapy: A patient-specific in silico study based on magnetic nanoparticles-coated microcarriers adhesion. Int. J. Pharm. 2021, 609, 121133. [Google Scholar] [CrossRef] [PubMed]
- Zafar, Z.U.A.; Younas, S.; Hussain, M.T.; Tunç, C. Fractional Aspects of Coupled Mass-Spring System. Chaos Solitons Fractals 2021, 144, 110677. [Google Scholar] [CrossRef]
- Mojallizadeh, M.R.; Brogliato, B.; Polyakov, A.; Selvarajan, S.; Michel, L.; Plestan, F.; Ghanes, M.; Barbot, J.P.; Aoustin, Y. Discrete-Time Differentiators in Closed-Loop Control Systems: Experiments on Electro-Pneumatic System and Rotary Inverted Pendulum; INRIA Grenoble: Montbonnot-Saint-Martin, France, 2021. [Google Scholar]
- Mofid, O.; Mobayen, S. Adaptive finite-time back-stepping global sliding mode tracker of quad-rotor UAVs under model uncertainty, wind perturbation and input saturation. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 140–151. [Google Scholar] [CrossRef]
- Madsen, E.; Rosenlund, O.S.; Brandt, D.; Zhang, X. Adaptive feedforward control of a collaborative industrial robot manipulator using a novel extension of the Generalized Maxwell-Slip friction model. Mech. Mach. Theory 2021, 155, 104109. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, B.; Liu, X. An image encryption approach on the basis of a time delay chaotic system. Optik 2021, 225, 165737. [Google Scholar] [CrossRef]
- Tutsoy, O.; Barkana, D.E. Model free adaptive control of the under-actuated robot manipulator with the chaotic dynamics. ISA Trans. 2021, 118, 106–115. [Google Scholar] [CrossRef]
- Yang, T.; Sun, N.; Fang, Y. Adaptive fuzzy control for a class of MIMO underactuated systems with plant uncertainties and actuator deadzones: Design and experiments. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef]
- Yao, Q. Synchronization of second-order chaotic systems with uncertainties and disturbances using fixed-time adaptive sliding mode control. Chaos Solitons Fractals 2021, 142, 110372. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, X.; Meng, W.; Zheng, S.; Jiang, L.; Meng, J.; Wang, S. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot. ISA Trans. 2021, 108, 282–294. [Google Scholar] [CrossRef] [PubMed]
- Aydin, M.N.; Coban, R. PID sliding surface-based adaptive dynamic second-order fault-tolerant sliding mode control design and experimental application to an electromechanical system. Int. J. Control 2021, 1–10. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Chen, M.; Kong, L. Predefined-time sliding mode formation control for multiple autonomous underwater vehicles with uncertainties. Chaos Solitons Fractals 2021, 144, 110680. [Google Scholar] [CrossRef]
- Li, J.; Wang, J.; Peng, H.; Hu, Y.; Su, H. Fuzzy-torque approximation-enhanced sliding mode control for lateral stability of mobile robot. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 2491–2500. [Google Scholar] [CrossRef]
- Liu, Y.A.; Tang, S.; Liu, Y.; Kong, Q.; Wang, J. Extended dissipative sliding mode control for nonlinear networked control systems via event-triggered mechanism with random uncertain measurement. Appl. Math. Comput. 2021, 396, 125901. [Google Scholar] [CrossRef]
- Xiong, P.Y.; Jahanshahi, H.; Alcaraz, R.; Chu, Y.M.; Gómez-Aguilar, J.F.; Alsaadi, F.E. Spectral Entropy Analysis and Synchronization of a Multi-Stable Fractional-Order Chaotic System using a Novel Neural Network-Based Chattering-Free Sliding Mode Technique. Chaos Solitons Fractals 2021, 144, 110576. [Google Scholar] [CrossRef]
- Wei, Z.; Yousefpour, A.; Jahanshahi, H.; Kocamaz, U.E.; Moroz, I. Hopf bifurcation and synchronization of a five-dimensional self-exciting homopolar disc dynamo using a new fuzzy disturbance-observer-based terminal sliding mode control. J. Frankl. Inst. 2021, 358, 814–833. [Google Scholar] [CrossRef]
- Nekoukar, V.; Dehkordi, N.M. Robust path tracking of a quadrotor using adaptive fuzzy terminal sliding mode control. Control Eng. Pract. 2021, 110, 104763. [Google Scholar] [CrossRef]
- Fei, J.; Chen, Y.; Liu, L.; Fang, Y. Fuzzy multiple hidden layer recurrent neural control of nonlinear system using terminal sliding-mode controller. IEEE Trans. Cybern. 2021, 1–16. [Google Scholar] [CrossRef]
- Rojsiraphisal, T.; Mobayen, S.; Asad, J.H.; Vu, M.T.; Chang, A.; Puangmalai, J. Fast Terminal Sliding Control of Underactuated Robotic Systems Based on Disturbance Observer with Experimental Validation. Mathematics 2021, 9, 1935. [Google Scholar] [CrossRef]
- Shao, X.; Sun, G.; Xue, C.; Li, X. Nonsingular terminal sliding mode control for free-floating space manipulator with disturbance. Acta Astronaut. 2021, 181, 396–404. [Google Scholar] [CrossRef]
- Ghadiri, H.; Emami, M.; Khodadadi, H. Adaptive super-twisting non-singular terminal sliding mode control for tracking of quadrotor with bounded disturbances. Aerosp. Sci. Technol. 2021, 112, 106616. [Google Scholar] [CrossRef]
- Lian, S.; Meng, W.; Lin, Z.; Shao, K.; Zheng, J.; Li, H.; Lu, R. Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode. IEEE Trans. Ind. Electron. 2021, 69, 1597–1607. [Google Scholar] [CrossRef]
- Tran, D.-T.; Ahn, K.K. Adaptive Nonsingular Fast Terminal Sliding mode Control of Robotic Manipulator Based Neural Network Approach. Int. J. Precis. Eng. Manuf. 2021, 22, 417–429. [Google Scholar] [CrossRef]
- Rangel, M.A.G.; Manzanilla, A.; Suarez, A.E.Z.; Muñoz, F.; Salazar, S.; Lozano, R. Adaptive non-singular terminal sliding mode control for an unmanned underwater vehicle: Real-time experiments. Int. J. Control Autom. Syst. 2020, 18, 615–628. [Google Scholar] [CrossRef]
- Shen, H.; Pan, Y.-J. Tracking synchronization improvement of networked manipulators using novel adaptive non-singular terminal sliding mode control. IEEE Trans. Ind. Electron. 2020, 68, 4279–4287. [Google Scholar] [CrossRef]
- Roman, R.-C.; Precup, R.-E.; Petriu, E.M. Hybrid data-driven fuzzy active disturbance rejection control for tower crane systems. Eur. J. Control 2021, 58, 373–387. [Google Scholar] [CrossRef]
- Zhu, Z.; Pan, Y.; Zhou, Q.; Lu, C. Event-triggered adaptive fuzzy control for stochastic nonlinear systems with unmeasured states and unknown backlash-like hysteresis. IEEE Trans. Fuzzy Syst. 2020, 29, 1273–1283. [Google Scholar] [CrossRef]
- Obeid, H.; Fridman, L.M.; Laghrouche, S.; Harmouche, M. Barrier function-based adaptive sliding mode control. Automatica 2018, 93, 540–544. [Google Scholar] [CrossRef]
- Tajik, N.; Frech, M.; Schulz, O.; Schälter, F.; Lucas, S.; Azizov, V.; Dürholz, K.; Steffen, F.; Omata, Y.; Rings, A.; et al. Targeting zonulin and intestinal epithelial barrier function to prevent onset of arthritis. Nat. Commun. 2020, 11, 1995. [Google Scholar] [CrossRef] [Green Version]
- Zhao, K.; Song, Y.; Chen, C.P.; Chen, L. Control of nonlinear systems under dynamic constraints: A unified barrier function-based approach. Automatica 2020, 119, 109102. [Google Scholar] [CrossRef]
- Scott, S.A.; Fu, J.; Chang, P.V. Microbial tryptophan metabolites regulate gut barrier function via the aryl hydrocarbon receptor. Proc. Natl. Acad. Sci. USA 2020, 117, 19376–19387. [Google Scholar] [CrossRef] [PubMed]
- Shin, S.-Y.; Lee, J.-J. Fuzzy sliding mode control for an under-actuated system with mismatched uncertainties. Artif. Life Robot. 2010, 15, 355–358. [Google Scholar] [CrossRef]
- Shafiei, M.; Azadian, A. Discrete-time control of a nonlinear system with integrating the integral terminal sliding mode and model predictive control. Modares Mech. Eng. 2019, 19, 2697–2704. [Google Scholar]
- Pourhashemi, A.; Ramezani, A.; Siahi, M. Designing dynamic fractional terminal sliding mode controller for a class of nonlinear system with uncertainties. Int. J. Autom. Control 2019, 13, 197–225. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.-J. Adaptive neural integral full-order terminal sliding mode control for an uncertain nonlinear system. IEEE Access 2019, 7, 42238–42246. [Google Scholar] [CrossRef]
- Wan, L.; Chen, G.; Sheng, M.; Zhang, Y.; Zhang, Z. Adaptive chattering-free terminal sliding-mode control for full-order nonlinear system with unknown disturbances and model uncertainties. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420925295. [Google Scholar] [CrossRef]
- Zakeri, E.; Moezi, S.A.; Eghtesad, M. Optimal interval type-2 fuzzy fractional order super twisting algorithm: A second order sliding mode controller for fully-actuated and under-actuated nonlinear systems. ISA Trans. 2019, 85, 13–32. [Google Scholar] [CrossRef]
- Saleem, O.; Mahmood-ul-Hasan, K. Adaptive State-space Control of Under-actuated Systems Using Error-magnitude Dependent Self-tuning of Cost Weighting-factors. Int. J. Control Autom. Syst. 2020, 19, 931–941. [Google Scholar] [CrossRef]
- Rajaei, A.; Vahidi-Moghaddam, A.; Eghtesad, M.; Necsulescu, D.S.; Yazdi, E.A. Nonsingular decoupled terminal sliding-mode control for a class of fourth-order under-actuated nonlinear systems with unknown external disturbance. Eng. Res. Express 2020, 2, 035028. [Google Scholar] [CrossRef]
- Mahmoodabadi, M.; Sahnehsaraei, M.A. Parametric uncertainty handling of under-actuated nonlinear systems using an online optimal input–output feedback linearization controller. Syst. Sci. Control Eng. 2021, 9, 209–218. [Google Scholar] [CrossRef]
- Wang, N.; Fu, Z.; Song, S.; Wang, T. Barrier Lyapunov-based Adaptive Fuzzy Finite-Time Tracking of Pure-feedback Nonlinear Systems with Constraints. IEEE Trans. Fuzzy Syst. 2021. [Google Scholar] [CrossRef]
- Shen, F.; Wang, X.; Yin, X. Adaptive control based on Barrier Lyapunov function for a class of full-state constrained stochastic nonlinear systems with dead-zone and unmodeled dynamics. Trans. Inst. Meas. Control 2021, 43, 1936–1948. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, Y.; Liu, L. Observer-Based Adaptive Fuzzy Tracking Control Using Integral Barrier Lyapunov Functionals for A Nonlinear System with Full State Constraints. IEEE/CAA J. Autom. Sin. 2021, 8, 617–627. [Google Scholar] [CrossRef]
- Tunç, O. On the behaviors of solutions of systems of non-linear differential equations with multiple constant delays. Rev. Real Acad. Cienc. Exactas Físicas Nat. Ser. A Matemáticas 2021, 115, 164. [Google Scholar] [CrossRef]
- Tunç, C.; Tunç, O.; Wang, Y.; Yao, J.C. Qualitative Analyses of Differential Systems with Time-Varying Delays via Lyapunov–Krasovskiĭ Approach. Mathematics 2021, 9, 1196. [Google Scholar] [CrossRef]
- Laghrouche, S.; Harmouche, M.; Chitour, Y.; Obeid, H.; Fridman, L.M. Barrier function-based adaptive higher order sliding mode controllers. Automatica 2021, 123, 109355. [Google Scholar] [CrossRef]
- Obeid, H.; Laghrouche, S.; Fridman, L.; Chitour, Y.; Harmouche, M. Barrier Function-Based Adaptive Super-Twisting Controller. IEEE Trans. Autom. Control 2020, 65, 4928–4933. [Google Scholar] [CrossRef] [Green Version]
- Shao, K.; Zheng, J.; Wang, H.; Wang, X.; Lu, R.; Man, Z. Tracking control of a linear motor positioner based on barrier function adaptive sliding mode. IEEE Trans. Ind. Inform. 2021, 17, 7479–7488. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhu, F. Barrier-function-based distributed adaptive control of nonlinear CAVs with parametric uncertainty and full-state constraint. Transp. Res. Part C Emerg. Technol. 2019, 104, 249–264. [Google Scholar] [CrossRef]
- Mobayen, S.; Alattas, K.A.; Assawinchaichote, W. Adaptive Continuous Barrier Function Terminal Sliding Mode Control Technique for Disturbed Robotic Manipulator. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 4403–4412. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Sambas, A.; Azar, A.T.; Singh, S. A New Multistable Plasma Torch Chaotic Jerk System, Its Dynamical Analysis, Active Backstepping Control, and Circuit Design. In Backstepping Control of Nonlinear Dynamical Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 191–214. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Article | Advantages | Disadvantages |
|---|---|---|
| Method in [34] | Rejection of uncertainty using fuzzy control technique. | No consideration of exterior perturbation and finite-time convergence. |
| Method in [35] | Reduction of chattering phenomenon via MPC method. | No control technique such as adaptive control for rejection of disturbance and uncertainty. |
| Method in [36] | Removal of singularity problem. | Declaration of impact of the outdoor perturbation. |
| Method in [37] | Radial basis function neural-network (RBFNN) for performance improvement under uncertainties and disturbances. | Change of the system’s performance by variations of disturbance and uncertainty. |
| Method in [38] | Suggestion of TSMC for fast convergence and adaptive controller for the estimation of upper bounds of perturbations. | Damage of the system’s performance by a significant change in disturbance and uncertainty. |
| Method in [39] | Fast convergence of perturbed and uncertain nonlinear system. | No control technique for the removal of uncertainty. |
| Method in [40] | Adaptive self-tuning technique according to the linear-quadratic-regulator (LQR). | No consideration of the fast stability control of system. |
| Method in [41] | Proposition of a finite-time disturbance observer for disturbance rejection. | The chattering problem is denied. |
| Method in [42] | Suggestion of input-output feedback linearization via online optimal control based on multi-crossover genetic algorithm. | Fast convergence and effects of the external disturbances are ignored. |
| Method in [43] | Using the integral barrier function-based fuzzy control for rejection of state constraints and estimation of the nonlinear uncertainties. | No examination of the impression of exterior perturbation in the control strategy. |
| Method in [44] | Compensation of the unmodeled dynamics by barrier function theory and offering a backstepping procedure for stability of the system. | No investigation of disturbance rejection. |
| Method in [45] | Backstepping technique for tracking control and barrier function for compensation of the states’ constraints. | The impacts of exterior disturbances are denied. |
| Method in [46] | Two new Lyapunov−Krasovskii functionals for the boundedness and stability analysis of system. | No examination of the impression of the exterior perturbation in the control strategy. |
| Method in [47] | Non-singular finite time control approach. | No consideration of the performance improvement of the closed-loop control system. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alattas, K.A.; Vu, M.T.; Mofid, O.; El-Sousy, F.F.M.; Alanazi, A.K.; Awrejcewicz, J.; Mobayen, S. Adaptive Nonsingular Terminal Sliding Mode Control for Performance Improvement of Perturbed Nonlinear Systems. Mathematics 2022, 10, 1064. https://doi.org/10.3390/math10071064
Alattas KA, Vu MT, Mofid O, El-Sousy FFM, Alanazi AK, Awrejcewicz J, Mobayen S. Adaptive Nonsingular Terminal Sliding Mode Control for Performance Improvement of Perturbed Nonlinear Systems. Mathematics. 2022; 10(7):1064. https://doi.org/10.3390/math10071064
Chicago/Turabian StyleAlattas, Khalid A., Mai The Vu, Omid Mofid, Fayez F. M. El-Sousy, Abdullah K. Alanazi, Jan Awrejcewicz, and Saleh Mobayen. 2022. "Adaptive Nonsingular Terminal Sliding Mode Control for Performance Improvement of Perturbed Nonlinear Systems" Mathematics 10, no. 7: 1064. https://doi.org/10.3390/math10071064