

Stability and Synchronization of Fractional-Order Complex-Valued Inertial Neural Networks: A Direct Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- An important fractional inequality in sense of the Caputo derivative is developed to ensure the convergence of nonnegative functions, which provides an effective tool for the stability and adaptive control of fractional systems.
- (2)
- Unlike the separate control design for reduced-order subsystems of fractional inertial NNs in [39,40,41], some compact feedback and adaptive control schemes composed of the linear part and the fractional derivative part are directly designed for the response fractional inertial NNs to achieve synchronization. Obviously, the control schemes here are more concise and more easily implemented in practice since the reduced process is avoided.
- (3)
- Some new Lyapunov functions, consisting of the complex-valued states and their fractional derivatives, are constructed to derive the stability and synchronization criteria. Compared with the previous separation analysis for complex-valued NNs [18,19,21,22,23], the presented direct Lyapunov method in the field of complex numbers simplifies theoretical analysis and control design and induces some compact criteria.
2. Preliminaries
3. Asymptotic Stability
- (i).
- If , according to Assumption 2,
- (ii).
- If , from condition (9),
4. Asymptotic Synchronization
- (i).
- If , from condition (19) and inequality (21),
- (ii).
- If , from condition (20), , ,
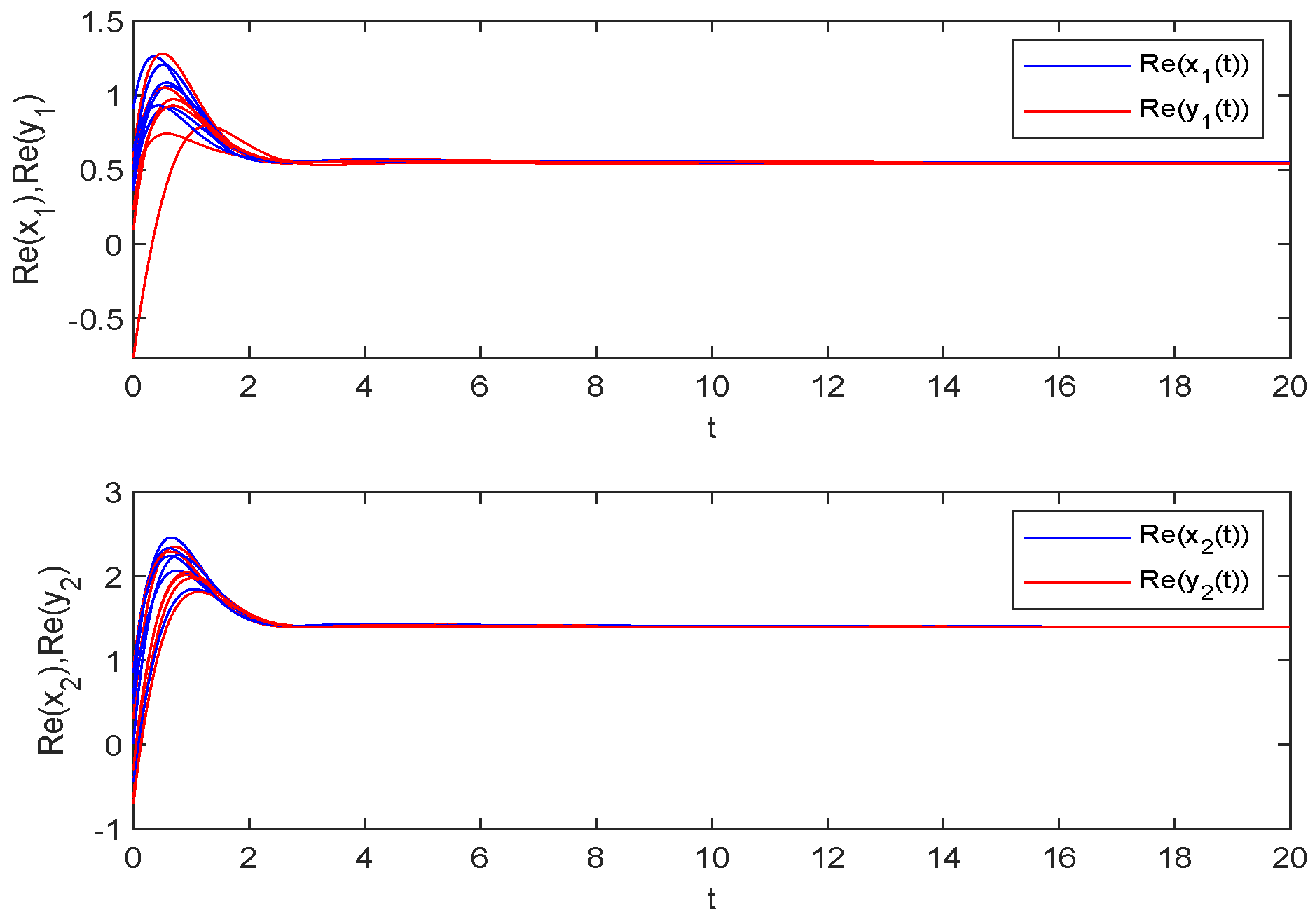
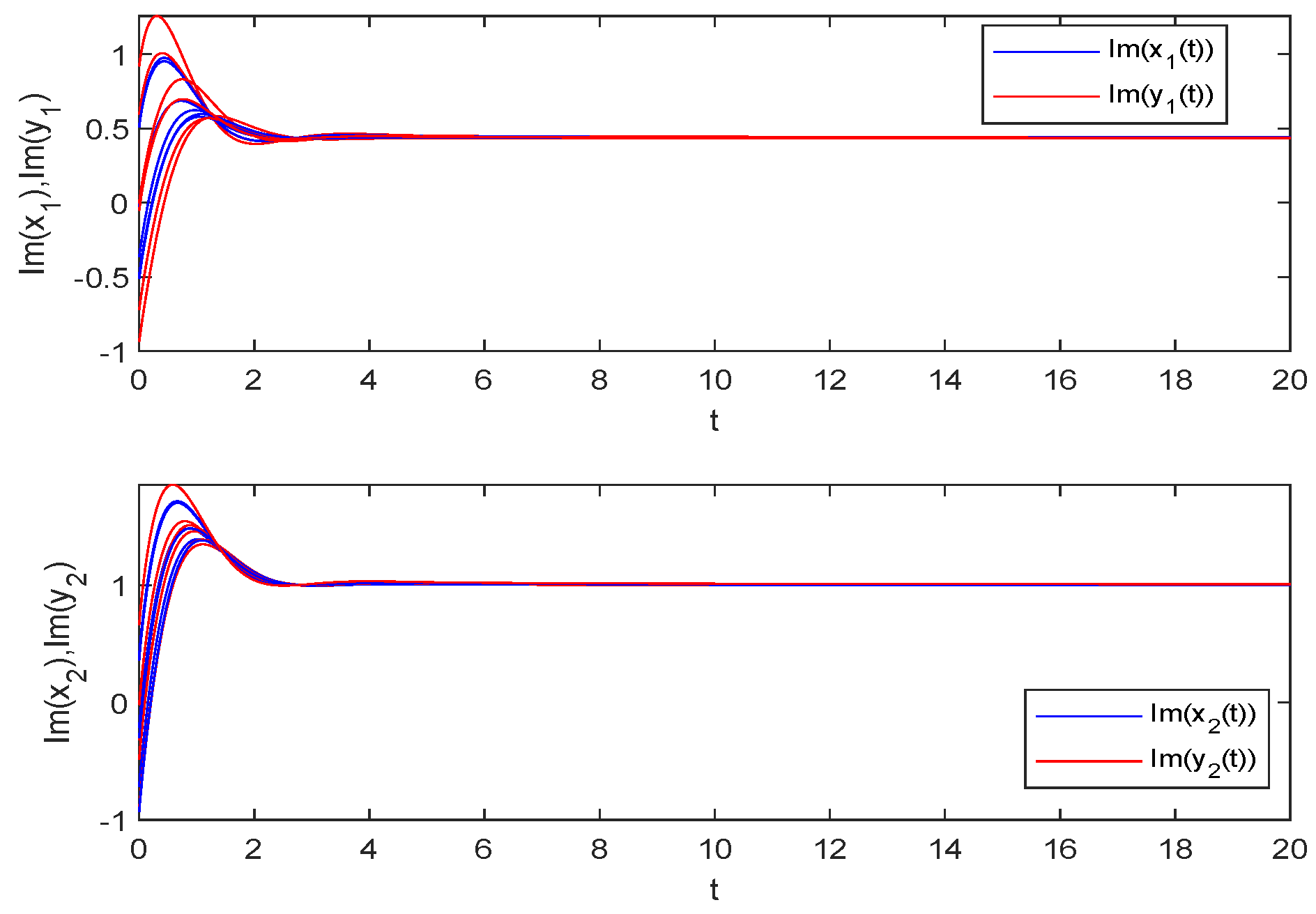
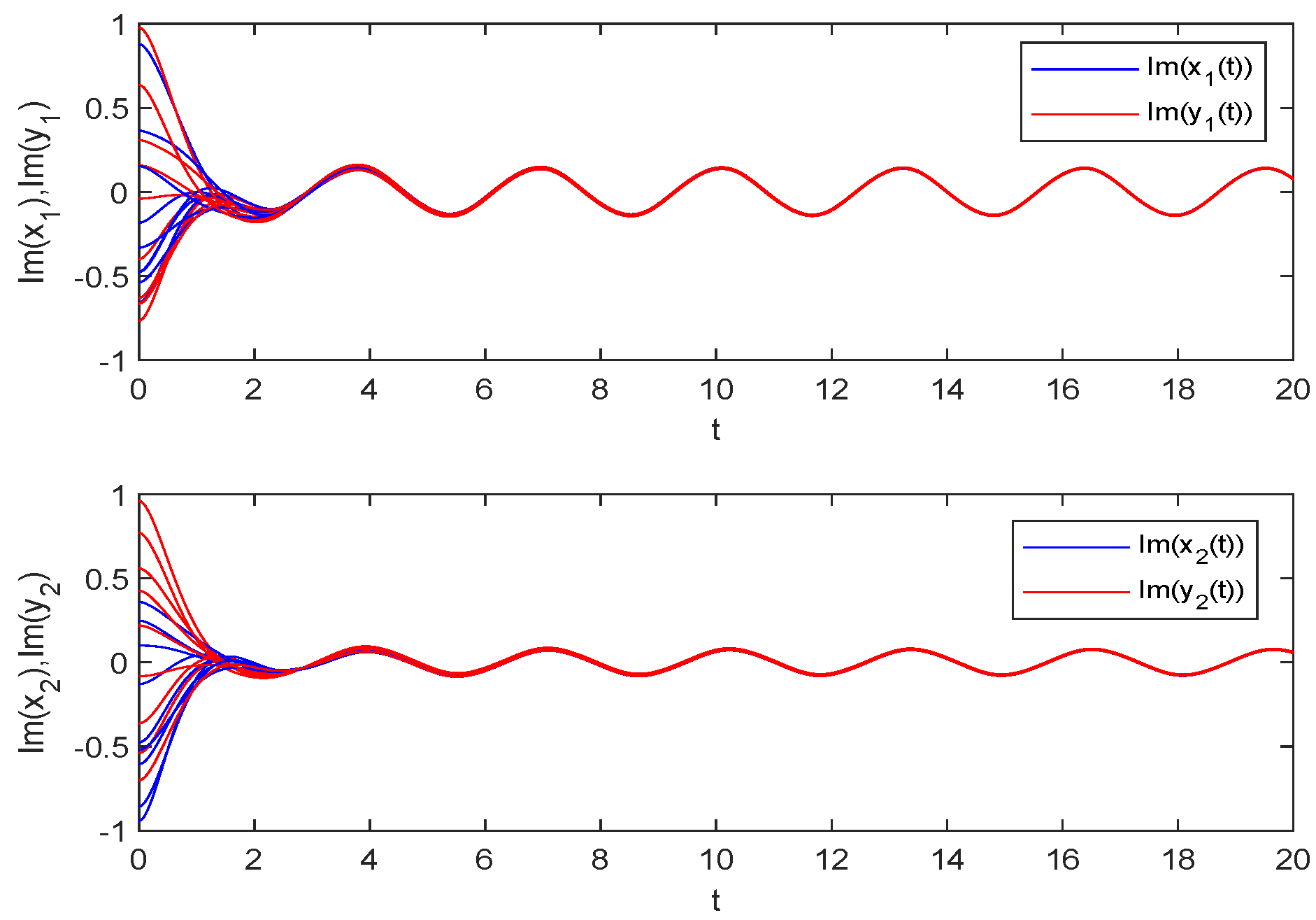
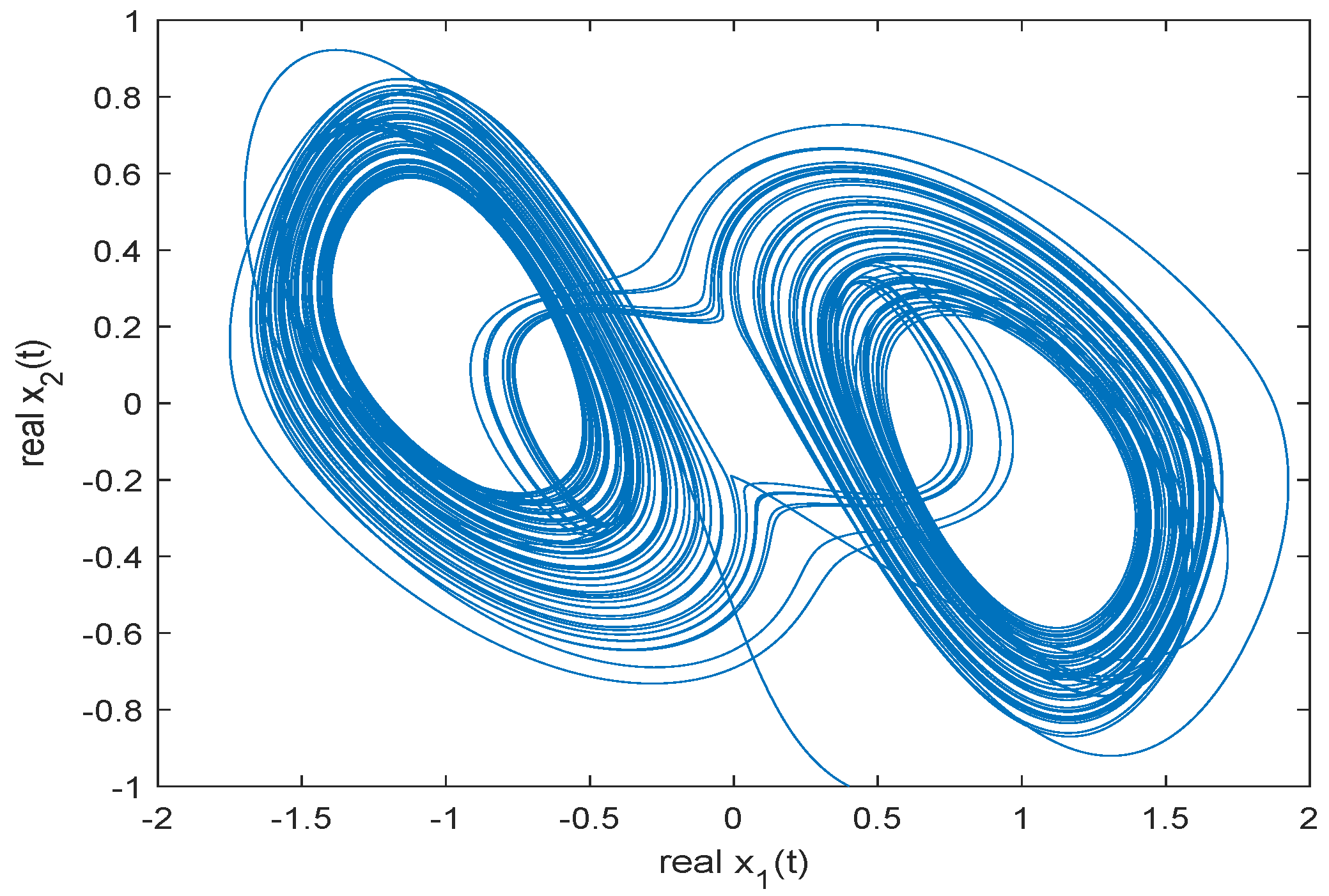
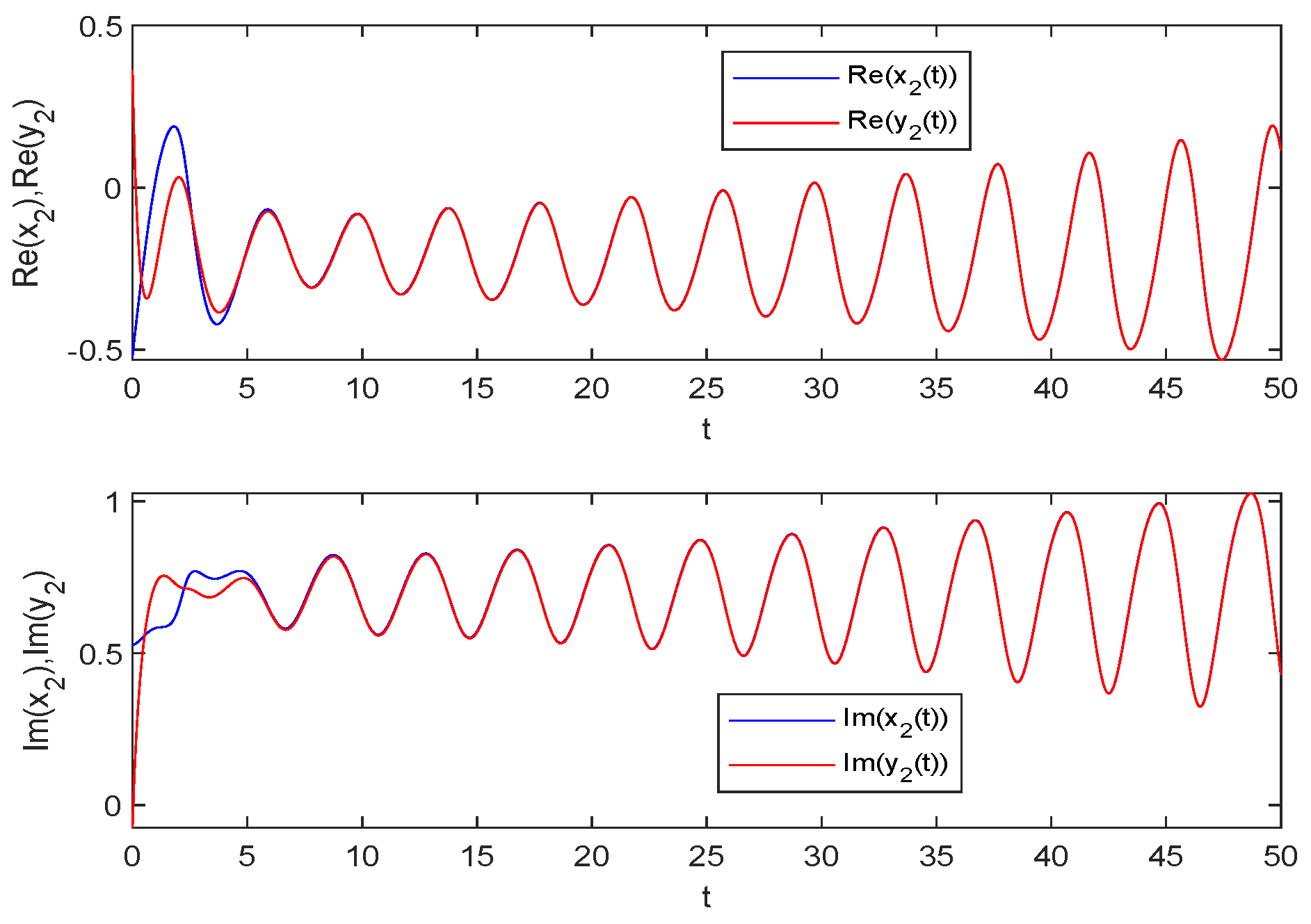
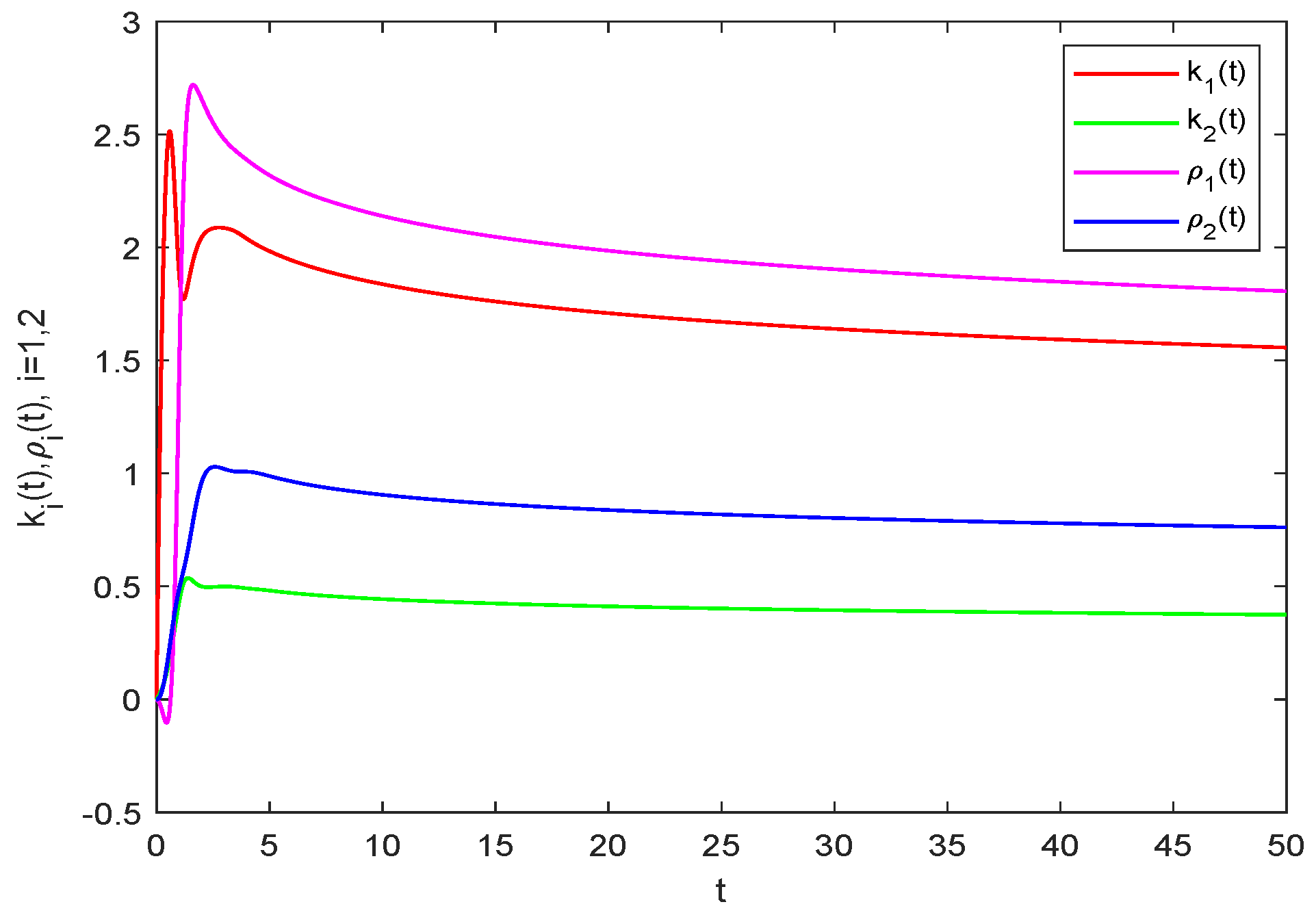
5. Numerical Simulations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, Z.; Tang, R.; Sun, Y.; Li, X.; Yang, X. Secure synchronization of coupled systems via double event-triggering mechanisms with actuator fault. IEEE Trans. Netw. Sci. Eng. 2022, 9, 3580–3589. [Google Scholar] [CrossRef]
- Rathinasamy, A.; Mayavel, P. Strong convergence and almost sure exponential stability of balanced numerical approximations to stochastic delay Hopfield neural networks. Appl. Math. Comput. 2023, 438, 127573. [Google Scholar] [CrossRef]
- Zheng, C.; Hu, C.; Yu, J.; Jiang, H. Fixed-time synchronization of discontinuous competitive neural networks with time-varying delays. Neural Netw. 2022, 153, 192–203. [Google Scholar] [CrossRef]
- Bai, Z.; Yang, T. Spreading speeds of cellular neural networks model with time delay. Chaos Solitons Fractals 2022, 160, 112096. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Li, J.; Duan, S.; Wang, L.; Guo, M. A reconfigurable bidirectional associative memory network with memristor bridge. Neurocomputing 2021, 454, 382–391. [Google Scholar] [CrossRef]
- Mauro, A. Subthreshold behavior and phenomenological impedance of the squid giant axon. J. Gen. Physiol. 1970, 55, 497–523. [Google Scholar] [CrossRef] [Green Version]
- Babcock, K.; Westervelt, R. Dynamics of simple electronic neural networks. Physica D 1987, 28, 305–316. [Google Scholar] [CrossRef]
- Sheng, Y.; Huang, T.; Zeng, Z.; Li, P. Exponential stabilization of inertial memristive neural networks with multiple time delays. IEEE Trans. Cybern. 2019, 51, 579–588. [Google Scholar] [CrossRef]
- Maharajan, C.; Raja, R.; Cao, J.; Rajchakit, G. Novel global robust exponential stability criterion for uncertain inertial-type BAM neural networks with discrete and distributed time-varying delays via lagrange sense. J. Frankl. Inst. 2018, 355, 4727–4754. [Google Scholar] [CrossRef]
- Udhayakumar, K.; Shanmugasundaram, S.; Kashkynbayev, A.; Janani, K.; Rakkiyappan, R. Saturated and asymmetric saturated impulsive control synchronization of coupled delayed inertial neural networks with time-varying delays. Appl. Math. Model. 2023, 113, 528–544. [Google Scholar] [CrossRef]
- Shanmugasundaram, S.; Udhayakumar, K.; Gunasekaran, D.; Rakkiyappan, R. Event-triggered impulsive control design for synchronization of inertial neural networks with time delays. Neurocomputing 2022, 483, 322–332. [Google Scholar] [CrossRef]
- Akhmet, M.; Tleubergenova, M.; Zhamanshin, A. Inertial Neural Networks with Unpredictable Oscillations. Mathematics 2020, 8, 1797. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Hu, C. Some new results on stability and synchronization for delayed inertial neural networks based on non-reduced order method. Neural Netw. 2017, 96, 91–100. [Google Scholar] [CrossRef]
- Han, S.; Hu, C.; Yu, J.; Jiang, H.; Wen, S. Stabilization of inertial Cohen-Grossberg neural networks with generalized delays: A direct analysis approach. Chaos Solitons Fractals 2020, 142, 110432. [Google Scholar] [CrossRef]
- Zhang, G.; Zeng, Z. Stabilization of second-order memristive neural networks with mixed time delays via nonreduced order. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 700–706. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, Z. State estimation for complex-valued inertial neural networks with multiple time delays. Mathematics 2022, 10, 1725. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, L. Stabilization and lag synchronization of proportional delayed impulsive complex-valued inertial neural networks. Neurocomputing 2022, 507, 428–440. [Google Scholar] [CrossRef]
- Liu, Y.; Shen, B.; Zhang, P. Synchronization and state estimation for discrete-time coupled delayed complex-valued neural networks with random system parameters. Neural Netw. 2022, 150, 181–193. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, Z. Globally asymptotic synchronization for complex-valued BAM neural networks by the differential inequality way. Chaos Solitons Fractals 2022, 164, 112681. [Google Scholar] [CrossRef]
- Xiang, J.; Ren, J.; Tan, M. Asymptotical synchronization for complex-valued stochastic switched neural networks under the sampled-data controller via a switching law. Neurocomputing 2022, 514, 414–425. [Google Scholar] [CrossRef]
- Hu, J.; Zeng, C. Adaptive exponential synchronization of complex-valued Cohen-Grossberg neural networks with known and unknown parameters. Neural Netw. 2017, 86, 90–101. [Google Scholar] [CrossRef]
- Kan, Y.; Lu, J.; Qiu, J.; Kurths, J. Exponential synchronization of time-varying delayed complex-valued neural networks under hybrid impulsive controllers. Neural Netw. 2019, 114, 157–163. [Google Scholar] [CrossRef]
- Cheng, Y.; Hu, T.; Xu, W.; Zhang, X.; Zhong, S. Fixed-time synchronization of fractional-order complex-valued neural networks with time-varying delay via sliding mode control. Neurocomputing 2022, 505, 339–352. [Google Scholar] [CrossRef]
- Yu, J.; Hu, C.; Jiang, H.; Wang, L. Exponential and adaptive synchronization of inertial complex-valued neural networks: A non-reduced order and non-separation approach. Neural Netw. 2020, 124, 50–59. [Google Scholar] [CrossRef]
- Liu, A.; Zhao, H.; Wang, Q.; Niu, S.; Gao, X.; Chen, C.; Li, L. A new predefined-time stability theorem and its application in the synchronization of memristive complex-valued BAM neural networks. Neural Netw. 2022, 153, 152–163. [Google Scholar] [CrossRef]
- Long, C.; Zhang, G.; Zeng, Z.; Hu, J. Finite-time stabilization of complex-valued neural networks with proportional delays and inertial terms: A non-separation approach. Neural Netw. 2022, 148, 86–95. [Google Scholar] [CrossRef]
- Yang, X.; Wan, X.; Cheng, Z.; Cao, J.; Liu, Y.; Rutkowski, L. Synchronization of switched discrete-time neural networks via quantized output control with actuator fault. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4191–4201. [Google Scholar] [CrossRef]
- Tang, R.; Su, H.; Zou, Y.; Yang, X. Finite-time synchronization of Markovian coupled neural networks with delays via intermittent quantized control: Linear programming approach. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 5268–5278. [Google Scholar] [CrossRef]
- Kilbas, A.; Srivastava, H.; Trujillo, J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Alattas, M.S.K.; El-Sousy, F.; Mohammadzadeh, A.; Mobayen, S.; Vu, M.; Aredes, M. A neural controller for induction motors: Fractional-order stability analysis and online learning algorithm. Mathematics 2022, 10, 1003. [Google Scholar]
- Kaslik, E.; Rădulescu, I. Dynamics of complex-valued fractional-order neural networks. Neural Netw. 2017, 89, 39–49. [Google Scholar] [CrossRef] [Green Version]
- Jia, J.; Zeng, Z. LMI-based criterion for global Mittag-Leffler lag quasi-synchronization of fractional-order memristor-based neural networks via linear feedback pinning control. Neurocomputing 2020, 412, 226–243. [Google Scholar] [CrossRef]
- Xi, H.; Zhang, R. Sliding mode control for memristor-based variable-order fractional delayed neural networks. Chin. J. Phys. 2022, 77, 572–582. [Google Scholar] [CrossRef]
- Yang, Y.; He, Y.; Wu, M. Intermittent control strategy for synchronization of fractional-order neural networks via piecewise Lyapunov function method. J. Frankl. Inst. 2019, 356, 4648–4676. [Google Scholar] [CrossRef]
- Agarwal, R.; Hristova, S. Impulsive memristive Cohen-Grossberg neural networks modeled by short term generalized proportional caputo fractional derivative and synchronization analysis. Mathematics 2022, 10, 2355. [Google Scholar] [CrossRef]
- Bao, H.; Park, H.; Cao, J. Adaptive synchronization of fractional-order output-coupling neural networks via quantized output control. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 3230–3239. [Google Scholar] [CrossRef]
- Kao, Y.; Li, Y.; Park, J.; Chen, X. Mittag-Leffler synchronization of delayed fractional memristor neural networks via adaptive control. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 2279–2284. [Google Scholar] [CrossRef]
- Li, Y.; Wei, M.; Tong, S. Event-triggered adaptive neural control for fractional-order nonlinear systems based on finite-time scheme. IEEE Trans. Cybern. 2021, 52, 9481–9489. [Google Scholar] [CrossRef]
- Gu, Y.; Wang, H.; Yu, Y. Stability and synchronization for Riemann-Liouville fractional-order time-delayed inertial neural networks. Neurocomputing 2019, 340, 270–280. [Google Scholar] [CrossRef]
- Liang, K. Mittag-Leffler stability and asymptotic ω-periodicity of fractional-order inertial neural networks with time-delays. Neurocomputing 2021, 465, 53–62. [Google Scholar]
- Liu, Y.; Sun, Y.; Liu, L. Stability analysis and synchronization control of fractional-order inertial neural networks with time-varying delay. IEEE Access 2022, 10, 56081–56093. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Yang, S.; Hu, C.; Yu, J.; Jiang, H. Quasi-projective synchronization of fractional-order complex-valued recurrent neural networks. Neural Netw. 2018, 104, 104–113. [Google Scholar] [CrossRef]
- Yang, Y.; Yu, J.; Hu, C.; Jiang, H.; Wen, S. Synchronization of fractional-order spatiotemporal complex networks with boundary communication. Neurocomputing 2021, 450, 197–207. [Google Scholar] [CrossRef]
- Kazarinoff, N.D. Analytic Inequalities; Holt, Rinehart and Winston: New York, NY, USA, 1961. [Google Scholar]
- Chen, J.; Chen, B.; Zeng, Z. O(t-α)-synchronization and Mittag-Leffler synchronization for the fractional-order memristive neural networks with delays and discontinuous neuron activations. Neural Netw. 2018, 100, 10–24. [Google Scholar] [CrossRef]
- Huang, C.; Yang, L.; Liu, B. New results on periodicity of non-autonomous inertial neural networks involving non-reduced order method. Neural Process. Lett. 2019, 50, 595–606. [Google Scholar] [CrossRef]
- Wei, X.; Zhang, Z.; Lin, C.; Chen, J. Synchronization and anti-synchronization for complex-valued inertial neural networks with time-varying delays. Appl. Math. Comput. 2021, 403, 126194. [Google Scholar] [CrossRef]
- Qi, Q.; Yang, X.; Xu, Z.; Zhang, M.; Huang, T. Novel LKF method on H∞ synchronization of switched time-delay systems. IEEE Trans. Cybern. 2022. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, H.; Hu, C.; Yu, J. Stability and Synchronization of Fractional-Order Complex-Valued Inertial Neural Networks: A Direct Approach. Mathematics 2022, 10, 4823. https://doi.org/10.3390/math10244823
Song H, Hu C, Yu J. Stability and Synchronization of Fractional-Order Complex-Valued Inertial Neural Networks: A Direct Approach. Mathematics. 2022; 10(24):4823. https://doi.org/10.3390/math10244823
Chicago/Turabian StyleSong, Hualin, Cheng Hu, and Juan Yu. 2022. "Stability and Synchronization of Fractional-Order Complex-Valued Inertial Neural Networks: A Direct Approach" Mathematics 10, no. 24: 4823. https://doi.org/10.3390/math10244823