
An Uncertain Sandwich Impulsive Control System with Impulsive Time Windows

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Exponential Stability Analysis
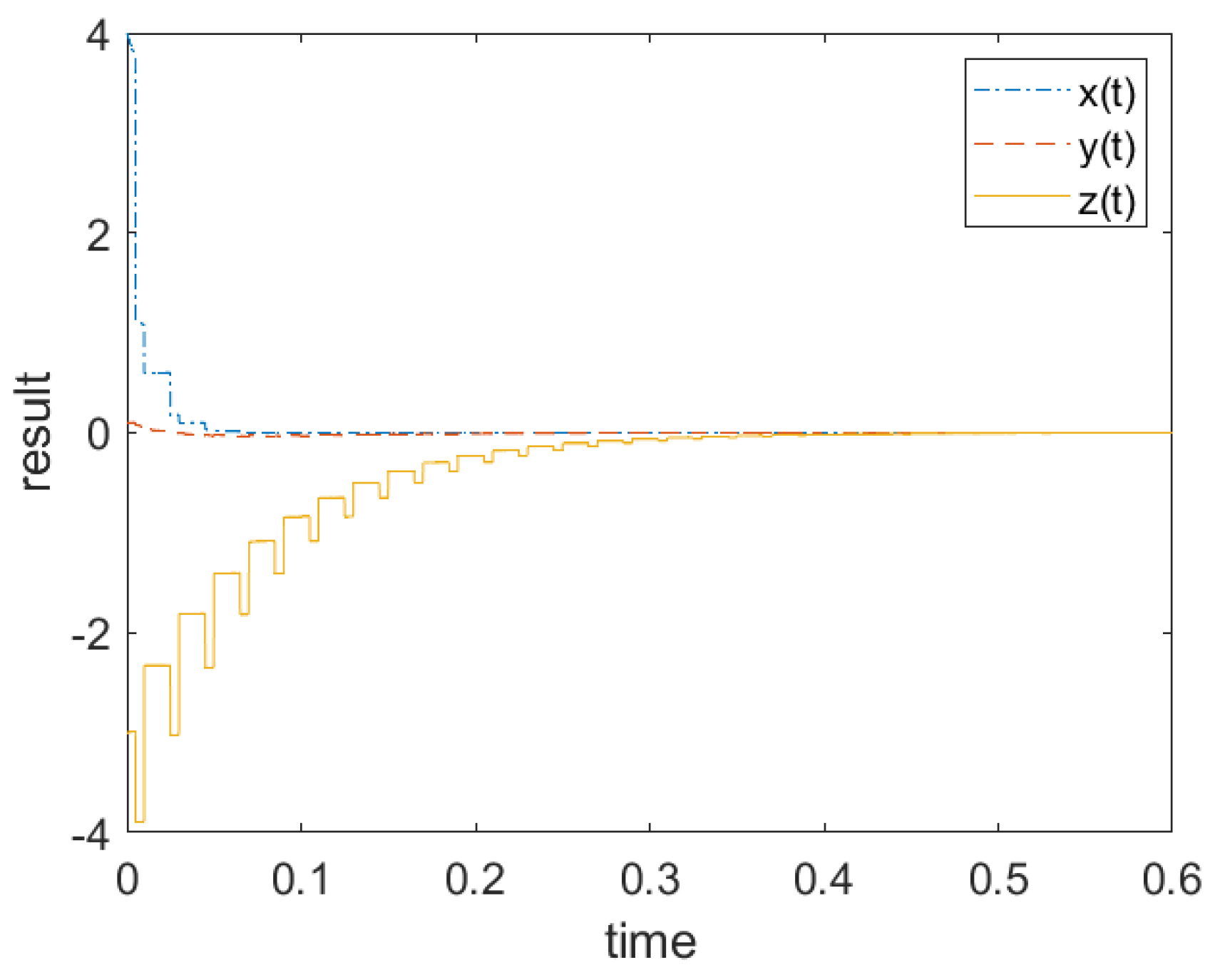
4. Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Milman, V.; Myshkis, A. On the Stability of Motion in the Presence of Impulses. Sib. Math. J. 1960, 1, 233–237. [Google Scholar]
- Lakshmikantham, V.; Simeonov, P.S. Theory of Impulsive Differential Equations; World Scientific: Singapore, 1989. [Google Scholar]
- Yang, T. Impulsive Control Theory; Springer: Berlin, Germany, 2001. [Google Scholar]
- Samoilenko, A.M.; Perestyuk, N.A. Impulsive Differential Equations; World Scientific: Singapore, 1995. [Google Scholar]
- Li, X.; Yang, X.; Huang, T. Persistence of delayed cooperative models: Impulsive control method. App. Math. Comput. 2019, 342, 130–146. [Google Scholar] [CrossRef]
- Zhan, T.; Ma, S.; Liu, X. Synchronization of singular switched complex networks via impulsive control with all nonsynchronized subnetworks. Int. J. Robust Nonlinear Control 2019, 29, 4872–4887. [Google Scholar] [CrossRef]
- Hespanha, J.P.; Liberzon, D.; Teel, A.R. Lyapunov conditions for input-to-state stability of impulsive systems. Automatica 2008, 44, 2735–2744. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Wu, X.; Shi, P.; Qian, F. Input-to-state stability for nonlinear systems with stochastic impulses. Automatica 2020, 113, 108766. [Google Scholar] [CrossRef]
- Chin, W.; Ott, E.; Nusse, H.E.; Grebogi, E. Grazing bifurcations in impact oscillators. Phys. Rev. E 1994, 20, 4427–4444. [Google Scholar] [CrossRef] [Green Version]
- Dankowicz, H.; Nordmark, A.B. On the origin and bifurcations of stick-slip oscillators. Physica D 2000, 136, 280–302. [Google Scholar] [CrossRef]
- Haddad, W.; Chellaboina, V.; Nersesov, S. Impulsive and Hybrid Dynamcial Systems: Stability, Dissipativity and Control; Princeton University Press: Princeton, NJ, USA, 2006. [Google Scholar]
- Goebel, R.; Sanfelice, R.G.; Teel, A.R. Hybrid Dynamical Systems: Modeling, Stability, and Robustness; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Gilbert, E.; Harasty, G. A class of fixed-time fuel-optimal impulsive control problems and an efficient algorithm for their solution. IEEE Trans. Automat. Control 1971, 16, 1–11. [Google Scholar] [CrossRef]
- Chazov, V.V.; Ivandikov, F.I.; Kuchumov, A.A.; Kurakhtenkov, L.V.; Magsumov, V.R. An algorithm for maintaining a given structure of an earth satellite constellation. In Proceedings of the Systems of Signal Synchronization, Generating and Processing in Telecommunications, Yaroslavl, Russia, 1–3 July 2019; pp. 1–4. [Google Scholar]
- Liang, X.; Pei, Y.; Zhu, M.; Lv, Y. Multiple kinds of optimal impulse control strategies on plant pest predator model with eco epidemiology. Appl. Math. Comput. 2016, 287, 1–11. [Google Scholar] [CrossRef]
- Wu, E.; Yang, X. Adaptive synchronization of coupled nonidentical chaotic systems with complex variables and stochastic perturbations. Nonlinear Dynam. 2015, 84, 261–269. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, X.; Yang, S.; Ahmed, A. Finite-time and fixed-time bipartite synchronization of complex networks with signed graphs. Math. Comput. Simulat. 2021, 188, 319–329. [Google Scholar] [CrossRef]
- Stojanovski, T.; Kocarev, L.; Parlitz, U. Driving and synchronizing by chaotic impulses. Phy. Rev. E 1996, 54, 2128–2131. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Gao, X.; Zhong, W.; Qian, F. Secure impulsive synchronization control of multi-agent systems under deception attacks. Inform. Sci. 2018, 459, 354–368. [Google Scholar] [CrossRef]
- Lu, J.; Ho, D.W.C.; Cao, J. A unified synchronization criterion for impulsive dynamical networks. Automatica 2010, 46, 1215–1221. [Google Scholar] [CrossRef]
- Cui, Q.; Li, L.; Cao, J.; Alsaadi, F.E. Synchronization of Kuramoto-oscillator networks under event-triggered delayed impulsive control. Physica A 2022, 608, 128250. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, K. Stabilization of nonlinear time-delay systems: Distributed-delay dependent impulsive control. Syst. Control Lett. 2018, 120, 17–22. [Google Scholar] [CrossRef]
- Wu, J.; Li, X. Stability of nonlinear differential systems with state-dependent delayed impulses. Automatica 2016, 64, 63–69. [Google Scholar]
- Li, X.; Peng, D.; Cao, J. Lyapunov stability for Impulsive systems via event-triggered impulsive control. IEEE Trans. Automat. Control 2020, 65, 4908–4913. [Google Scholar] [CrossRef]
- Cheng, P.; Deng, F.; Yao, F. Almost sure exponential stability and stochastic stabilization of stochastic differential systems with impulsive effects. Nonlinear Anal. 2018, 30, 106–117. [Google Scholar] [CrossRef]
- Dashkovskiy, S.; Mironchenko, A. Input-to-state stability of nonlinear impulsive systems. SIAM J. Control Optim. 2013, 51, 1962–1987. [Google Scholar] [CrossRef] [Green Version]
- Feketa, P.; Bajcinca, N. On robustness of impulsive stabilization. Automatica 2019, 104, 48–56. [Google Scholar] [CrossRef]
- Slyn’ko, V.; Tunc, C. Stability of abstract linear switched impulsive differential equations. Automatica 2019, 107, 433–441. [Google Scholar] [CrossRef]
- Myshkis, A.D.; Samoilenko, A.M. Systems with shocks at prescribed instants of time. Mat. Sb. 1967, 74, 202–208. [Google Scholar]
- Feng, Y.; Li, C.; Huang, T. Periodically multiple state-jumps impulsive control systems with impulse time windows. Neurocomputing 2016, 193, 7–13. [Google Scholar] [CrossRef]
- Zhou, W.; Huang, T.; He, X.; Li, C. Global exponential stability of inertial memristor-based neural networks with time-varying delays and impulses. Neural Netw. 2017, 95, 102–109. [Google Scholar]
- Rajchaki, G.; Chantho, P.; Niezabito, M.; Raja, R.; Baleanu, D.; Pratap, A. Impulsive effects on stability and passivity analysis of memristor-based fractional-order competitive neural networks. Neurocomputing 2020, 417, 290–301. [Google Scholar] [CrossRef]
- Feng, Y.; Liu, X.; Wang, Z.; Wang, W. A nonlinear impulsive control system with impulse time windows and un-fixed coefficient of impulsive intensity. In Proceedings of the 2019 International Conference on Information, Cybernetics, and Computational Social Systems, Chongqing, China, 27–30 September 2019; pp. 67–71. [Google Scholar]
- Naghshtabrizi, P.; Hespanha, J.; Teel, A. Exponential stability of impulsive systems with application to uncertain sampled-data systems. Syst. Control Lett. 2018, 57, 378–385. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Yu, J.; Li, C.; Huang, T.; Che, H. Linear impulsive control system with impulse time windows. J. Vib. Control 2017, 23, 111–118. [Google Scholar] [CrossRef]
- Yang, D.; Qiu, G.; Li, C. Global exponential stability of memristive neural networks with impulse time window and time-varying delays. Neurocomputing 2015, 17, 1021–1026. [Google Scholar] [CrossRef]
- Wang, X.; Li, C.; Huang, T.; Pan, X. Impulsive control and synchronization of nonlinear system with impulse time window. Nonlinear Dyn. 2014, 78, 2837–2845. [Google Scholar] [CrossRef]
- Feng, Y.; Li, C.; Huang, T. Sandwich control systems with impulse time windows. Int. J. Mach. Learn Cyb. 2017, 8, 2009–2015. [Google Scholar] [CrossRef]
- Liao, C.; Tu, D.; Feng, Y.; Zhang, W.; Wang, Z.; Onasanya, B.O. A Sandwich Control System with Dual Stochastic Impulses. IEEE CAA J. Autom. Sin. 2022, 9, 741–744. [Google Scholar] [CrossRef]
- Xiao, L.; Ling, B.; Xing, R.; Bing, H.; Isaac, E. Combined active learning Kriging with optimal saturation nonlinear vibration control for uncertain systems with both aleatory and epistemic uncertainties. J. Non-Linear Mech. 2022, 148, 104267. [Google Scholar]
- Feketa, P.; Klinshov, V.; Lücken, L. A survey on the modeling of hybrid behaviors: How to account for impulsive jumps properly. Commum. Nonlinear Sci. Simul. 2021, 103, 105955. [Google Scholar] [CrossRef]
- Xie, L.; Fu, M.; Souza, C. Control and quadratic stabilization of systems with parameter uncertainty via output feedback. IEEE Trans. Autom. Control 1992, 37, 1253–1256. [Google Scholar] [CrossRef]
- Ren, Z.; Wen, S.; Li, Q.; Feng, Y.; Tang, N. Stability analysis for nonlinear impulsive control system with uncertainty factors. Comput. Intel. Neurosc. 2022, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Wen, G.; Zhai, X.; Peng, Z.; Rahmani, A. Fault-Tolerant secure consensus tracking of delayed nonlinear multi-agent systems with deception attacks and uncertain parameters via impulsive control. Commun. Nonlinear Sci. Numer. Simulat. 2020, 19, 105043–105077. [Google Scholar] [CrossRef]
- Lin, J.; Cai, J.; Ma, M. Impulsive practical synchronization of hyperchaotic systems with uncertain parameters. In Proceedings of the 27th China Control and Decision Making Conference, Qingdao, China, 23–25 May 2015; pp. 2391–2395. [Google Scholar]
- Singh, V. Robust stability of cellular neural networks with delay: Linear matrix inequality approach, Control Theory and Applications. IEE Proc. Control Theory Appl. 2004, 151, 125–129. [Google Scholar] [CrossRef]
- Wang, Y.; Xie, L.; Souza, C. Robust control of a class of uncertain nonlinear systems. Syst. Control Lett. 1992, 19, 139–149. [Google Scholar] [CrossRef]
- Hale, J.K.; Verduyn-Lunel, S.M. Introduction to Functional Differential Eqnations; Springer: New York, NY, USA, 1993. [Google Scholar]
- Boyd, S.; Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadephia, PA, USA, 1994. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Chen, J.; Qu, D.; Li, K.; Luo, F. An Uncertain Sandwich Impulsive Control System with Impulsive Time Windows. Mathematics 2022, 10, 4708. https://doi.org/10.3390/math10244708
Chen H, Chen J, Qu D, Li K, Luo F. An Uncertain Sandwich Impulsive Control System with Impulsive Time Windows. Mathematics. 2022; 10(24):4708. https://doi.org/10.3390/math10244708
Chicago/Turabian StyleChen, Huafei, Jia Chen, Dan Qu, Kelin Li, and Fei Luo. 2022. "An Uncertain Sandwich Impulsive Control System with Impulsive Time Windows" Mathematics 10, no. 24: 4708. https://doi.org/10.3390/math10244708