

Numerical Solving Method for Jiles-Atherton Model and Influence Analysis of the Initial Magnetic Field on Hysteresis

Abstract
:1. Introduction
2. Revised Jiles–Atherton Model
3. Solution of Man
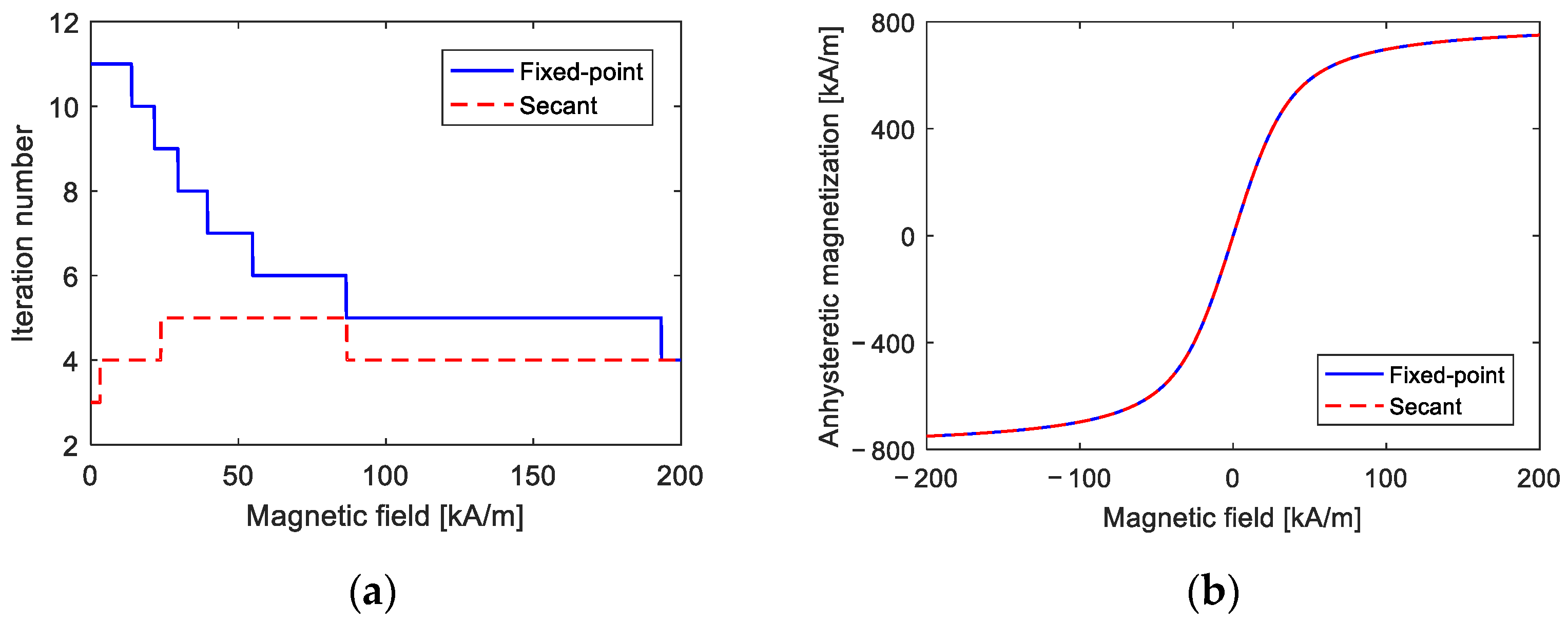
3.1. Secant Iteration Method
3.2. Optimization of Initial Values for Secant Iteration
4. Solution of M
4.1. Runge-Kutta Method
4.2. Required Calculation Cycles for Stability
5. Influence of Initial Magnetic Field
5.1. Nonzero Initial Magnetic Field
5.2. Square of the Magnetization M2
6. Conclusions
- (1)
- For solving the anhysteretic magnetization, the secant iteration method can reduce the iterative steps effectively when compared to the fixed-point iteration. Furthermore, optimal initial values were around 0.2(Ms/a)H and the value range was surrounded by four curves, whose equations were also supplied.
- (2)
- Analytical expression of dMan/dH was given and the Fourth Order Runge-Kutta method was employed to calculate M based on the values of Man and dMan/dH. Furthermore, more than three cycles of calculations can guarantee stable hysteresis results in most conditions, and the number of cycles should be increased when the amplitude of the magnetic field was quite low.
- (3)
- With the nonzero initial magnetic field H0, stimulated magnetization was acquired by total magnetization minus the initial magnetization M0, which should be calculated on a constructed path from 0 to H0 by a proposed numerical method. From calculated results, adjusting the value of H0 can change the value range and the curve shape of the magnetization, which cannot promote the peak-to-peak value or improve the symmetry of magnetization.
- (4)
- With the medium initial magnetic field, the linear model of M2–H was unacceptable when the model should be used on the conditions under different values of Hmax. Except for Hmax being quite close to a specified value, a linear model of M2 produced huge calculation errors on calculating the curve shape, maximum value or minimum value, especially with a relatively low Hmax.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Schmool, D.S.; Markó, D. Magnetism in Solids: Hysteresis. In Reference Module in Materials Science and Materials Engineering; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Quaranta, G.; Lacarbonara, W.; Masri, S.F. A review on computational intelligence for identification of nonlinear dynamical systems. Nonlinear Dyn. 2020, 99, 1709–1761. [Google Scholar] [CrossRef]
- Xue, G.; Zhang, P.; Li, X.; He, Z.; Wang, H.; Li, Y.; Ce, R.; Zeng, W.; Li, B. A review of giant magnetostrictive injector (GMI). Sens. Actuators A Phys. 2018, 273, 159–181. [Google Scholar] [CrossRef]
- Atherton, D.L.; Jiles, D.C. Effects of stress on magnetization. NDT Int. 1986, 19, 15–19. [Google Scholar] [CrossRef]
- Jiles, D.C.; Atherton, D.L. Ferromagnetic hysteresis. IEEE Trans. Magn. 1983, 19, 2183–2185. [Google Scholar] [CrossRef]
- Jiles, D.C. Frequency dependence of hysteresis curves in conducting magnetic materials. J. Appl. Phys. 1994, 76, 5849–5855. [Google Scholar] [CrossRef] [Green Version]
- Jiles, D.C. Modelling the effects of eddy current losses on frequency dependent hysteresis in electrically conducting media. IEEE Trans. Magn. 1994, 30, 4326–4328. [Google Scholar] [CrossRef] [Green Version]
- Jiles, D.C.; Atherton, D.L. Theory of ferromagnetic hysteresis. J. Magn. Magn. Mater. 1986, 61, 48–60. [Google Scholar] [CrossRef]
- Moya-Lasheras, E.; Sagues, C.; Llorente, S. An efficient dynamical model of reluctance actuators with flux fringing and magnetic hysteresis. Mechatronics 2021, 74, 102500. [Google Scholar] [CrossRef]
- Jamolov, U.; Maizza, G. Integral Methodology for the Multiphysics Design of an Automotive Eddy Current Damper. Energies 2022, 15, 1147. [Google Scholar] [CrossRef]
- Chen, L.; Feng, Y.; Li, R.; Chen, X.; Jiang, H. Jiles-Atherton Based Hysteresis Identification of Shape Memory Alloy-Actuating Compliant Mechanism via Modified Particle Swarm Optimization Algorithm. Complexity 2019, 2019, 7465461. [Google Scholar] [CrossRef]
- Yi, S.C.; Yang, B.T.; Meng, G. Microvibration isolation by adaptive feedforward control with asymmetric hysteresis compensation. MSSP 2019, 114, 644–657. [Google Scholar] [CrossRef]
- Li, W.; Xia, K.W.; Ling, W. Model and Experimental Study on Optical Fiber CT Based on Terfenol-D. Sensors 2020, 20, 2255. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Semenov, M.E.; Borzunov, S.V.; Meleshenko, P.A.; Lapin, A.V. A Model of Optimal Production Planning Based on the Hysteretic Demand Curve. Mathematics 2022, 10, 3262. [Google Scholar] [CrossRef]
- Saeed, S.; Georgious, R.; Garcia, J. Modeling of Magnetic Elements Including Losses-Application to Variable Inductor. Energies 2020, 13, 1865. [Google Scholar] [CrossRef] [Green Version]
- Nowicki, M.; Szewczyk, R.; Charubin, T.; Marusenkov, A.; Nosenko, A.; Kyrylchuk, V. Modeling the Hysteresis Loop of Ultra-High Permeability Amorphous Alloy for Space Applications. Materials 2018, 11, 2079. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Z.C.; Gong, Y. Research on Ferromagnetic Hysteresis of a Magnetorheological Fluid Damper. Front. Mater. 2019, 6, 111. [Google Scholar] [CrossRef]
- Li, Y.N.; Zhang, P.L.; He, Z.B.; Xue, G.M.; Wu, D.H.; Li, S.; Yang, Y.D.; Zeng, W. A simple magnetization model for giant magnetostrictive actuator used on an electronic controlled injector. J. Magn. Magn. Mater. 2019, 472, 59–65. [Google Scholar] [CrossRef]
- Ducharne, B.; Juuti, J.; Bai, Y. A Simulation Model for Narrow Band Gap Ferroelectric Materials. Adv. Theory Simul. 2020, 3, 2000052. [Google Scholar] [CrossRef]
- Dos Santos Coelho, L.; Mariani, V.C.; Leite, J.V. Solution of Jiles–Atherton vector hysteresis parameters estimation by modified Differential Evolution approaches. Expert Syst. Appl. 2012, 39, 2021–2025. [Google Scholar] [CrossRef]
- Hamel, M.; Nait Ouslimane, A.; Hocini, F. A study of Jiles-Atherton and the modified arctangent models for the description of dynamic hysteresis curves. Phys. B Condens. Matter 2022, 638, 413930. [Google Scholar] [CrossRef]
- Chen, L.; Zhu, Y.C.; Ling, J.; Feng, Z. Theoretical modeling and experimental evaluation of a magnetostrictive actuator with radial-nested stacked configuration. Nonlinear Dyn. 2022, 109, 1277–1293. [Google Scholar] [CrossRef]
- Szewczyk, R. Computational Problems Connected with Jiles-Atherton Model of Magnetic Hysteresis. In Recent Advances in Automation, Robotics and Measuring Techniques; Springer: Cham, Switzerland, 2014; pp. 275–283. [Google Scholar]
- Szewczyk, R. Progress in development of Jiles-Atherton model of magnetic hysteresis. AIP Conf. Proc. 2019, 2131, 020045. [Google Scholar]
- Xue, G.; Zhang, P.; He, Z.; Li, D. Approximation of anhysteretic magnetization and fast solving method for Jile-Atherton hysteresis equation. Ferroelectrics 2016, 502, 197–209. [Google Scholar] [CrossRef]
- Xue, G.; Zhang, P.; He, Z.; Li, D.; Yang, Z.; Zhao, Z. Modification and Numerical Method for the Jiles-Atherton Hysteresis Model. Commun. Comput. Phys. 2017, 21, 763–781. [Google Scholar] [CrossRef]
- Azzaoui, S.; Srairi, K.; Benbouzid, M.E.H. Non Linear Magnetic Hysteresis Modelling by Finite Volume Method for Jiles-Atherton Model Optimizing by a Genetic Algorithm. J. Electromagn. Anal. Appl. 2011, 3, 191–198. [Google Scholar] [CrossRef] [Green Version]
- Perkkiö, L.; Upadhaya, B.; Hannukainen, A.; Rasilo, P. Stable Adaptive Method to Solve FEM Coupled with Jiles–Atherton Hysteresis Model. IEEE Trans. Magn. 2018, 54, 7400208. [Google Scholar] [CrossRef]
- Quondam Antonio, S.; Fulginei, F.R.; Lozito, G.M.; Faba, A.; Salvini, A.; Bonaiuto, V.; Sargeni, F. Computing Frequency-Dependent Hysteresis Loops and Dynamic Energy Losses in Soft Magnetic Alloys via Artificial Neural Networks. Mathematics 2022, 10, 2346. [Google Scholar] [CrossRef]
- Napole, C.; Barambones, O.; Derbeli, M.; Calvo, I.; Silaa, M.Y.; Velasco, J. High-Performance Tracking for Piezoelectric Actuators Using Super-Twisting Algorithm Based on Artificial Neural Networks. Mathematics 2021, 9, 244. [Google Scholar] [CrossRef]
- Kokornaczyk, E.; Gutowski, M.W. Anhysteretic Functions for the Jiles–Atherton Model. IEEE Trans. Magn. 2015, 51, 7300305. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X. Model building and hysteresis compensation for giant magnetostrictive actuator. Chin. J. Sci. Instrum. 2007, 28, 812–819. [Google Scholar]
- Olabi, A.G.; Grunwald, A. Design and application of magnetostrictive materials. Mater. Des. 2008, 29, 469–483. [Google Scholar] [CrossRef] [Green Version]
- Karunanidhi, S.; Singaperumal, M. Design, analysis and simulation of magnetostrictive actuator and its application to high dynamic servo valve. Sens. Actuators A Phys. 2010, 157, 185–197. [Google Scholar] [CrossRef]
- Braghin, F.; Cinquemani, S.; Resta, F. A model of magnetostrictive actuators for active vibration control. Sens. Actuators A Phys. 2011, 165, 342–350. [Google Scholar] [CrossRef]
- D’Aquino, M.; Rubinacci, G.; Tamburrino, A.; Ventre, S. Three-Dimensional Computation of Magnetic Fields in Hysteretic Media with Time-Periodic Sources. IEEE Trans. Magn. 2014, 50, 53–56. [Google Scholar] [CrossRef]
- Guan, Z.; Lu, J. Fundamentals of Numerical Analysis (Version 3); Higher Education Press: Beijing, China, 2019. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Variable) [Unit] | Value |
|---|---|
| Quantified domain interactions (α) [null] | −0.01 |
| Saturation magnetization (Ms) [kA/m] | 800 |
| Reversibility coefficient (c) [null] | 0.2 |
| Shape parameter for anhysteretic magnetization (a) [kA/m] | 12 |
| Average energy required to break pinning sites (k) [kA/m] | 3 |
| Condition | Method | Step Number | Computing Time [s] |
|---|---|---|---|
| Low Amplitude | Fixed point method | 506,691 | 3.32 |
| Secant method before optimization | 189,460 | 1.50 | |
| Secant method after optimization | 148,881 | 1.23 | |
| Medium Amplitude | Fixed point method | 428,494 | 3.12 |
| Secant method before optimization | 195,784 | 1.67 | |
| Secant method after optimization | 149,493 | 1.34 | |
| High Amplitude | Fixed point method | 374,777 | 2.77 |
| Secant method before optimization | 197,366 | 1.72 | |
| Secant method after optimization | 149,601 | 1.36 |
| Initial Value H0 | M–H Curves under Different Magnetic Fields | |||
|---|---|---|---|---|
| Characteristics | Hmax = 10 kA/m | Hmax = 40 kA/m | Hmax = 80 kA/m | |
| Low (H0 = 10 kA/m) | Minimum [kA/m] | −61.8 | −207.7 | −354.1 |
| Maximum [kA/m] | 157.3 | 444.2 | 557.3 | |
| Curve cross | No | Yes | Yes | |
| Medium (H0 = 40 kA/m) | Minimum [kA/m] | −29.2 | −441.1 | −625.0 |
| Maximum [kA/m] | 64.3 | 160.1 | 209.5 | |
| Curve cross | No | No | Yes | |
| High (H0 = 80 kA/m) | Minimum [kA/m] | −8.2 | −117.1 | −602.1 |
| Maximum [kA/m] | 16.8 | 49.3 | 72.5 | |
| Curve cross | No | No | No | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, G.; Bai, H.; Li, T.; Ren, Z.; Liu, X.; Lu, C. Numerical Solving Method for Jiles-Atherton Model and Influence Analysis of the Initial Magnetic Field on Hysteresis. Mathematics 2022, 10, 4431. https://doi.org/10.3390/math10234431
Xue G, Bai H, Li T, Ren Z, Liu X, Lu C. Numerical Solving Method for Jiles-Atherton Model and Influence Analysis of the Initial Magnetic Field on Hysteresis. Mathematics. 2022; 10(23):4431. https://doi.org/10.3390/math10234431
Chicago/Turabian StyleXue, Guangming, Hongbai Bai, Tuo Li, Zhiying Ren, Xingxing Liu, and Chunhong Lu. 2022. "Numerical Solving Method for Jiles-Atherton Model and Influence Analysis of the Initial Magnetic Field on Hysteresis" Mathematics 10, no. 23: 4431. https://doi.org/10.3390/math10234431