
Generalized Spacelike Normal Curves in Minkowski Three-Space
 , ,
, ,  , and
, and 
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. EQF for EQS Curves in
4. Main Results
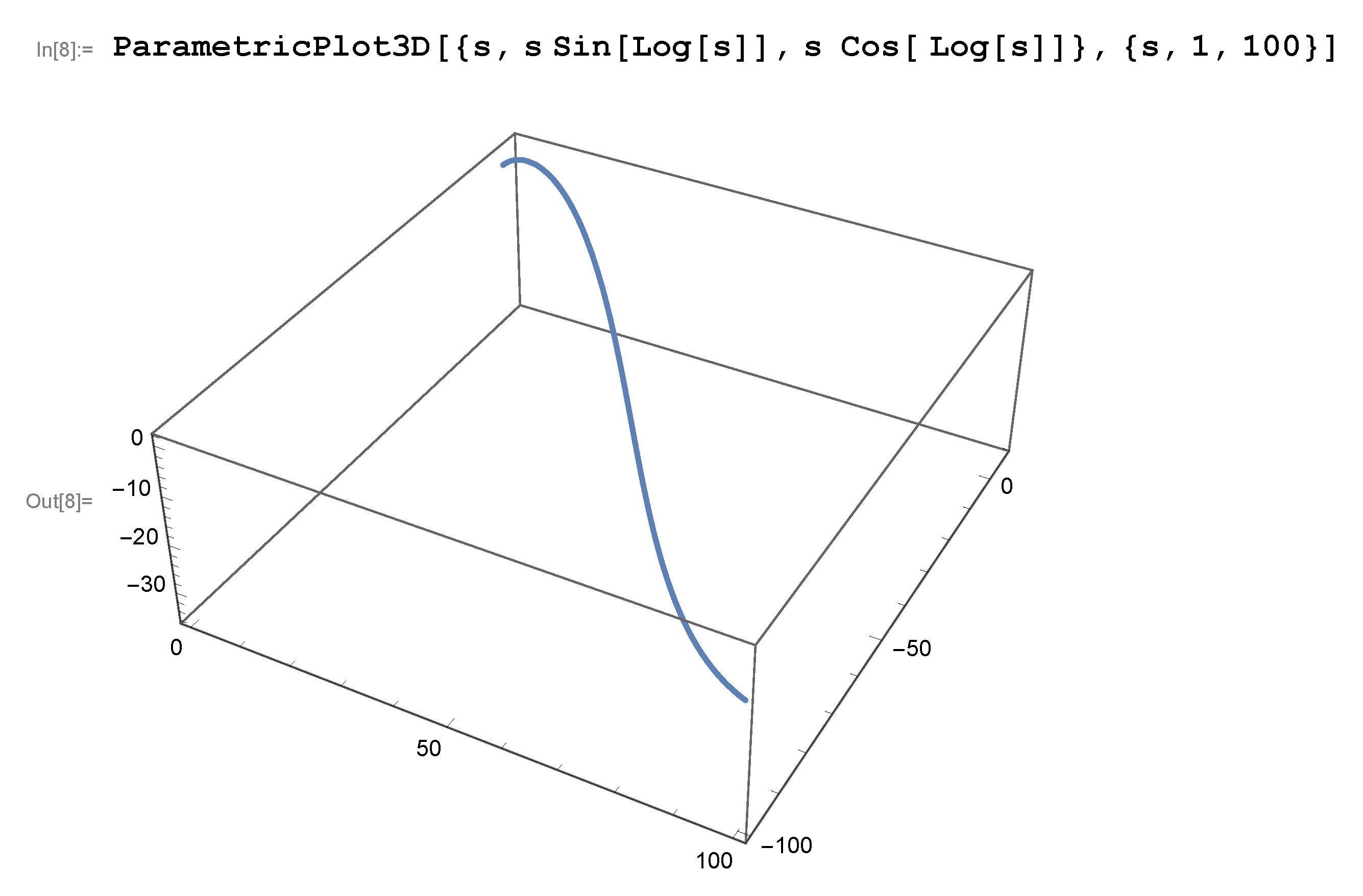
5. An Example
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ucum, A.; Nesovic, E.; Ilarslan, K. On generalized timelike Mannheim curves in Minkowski space-time. J. Dyn. Syst. Geom. Theor. 2015, 13, 71–94. [Google Scholar]
- Grbovic, M.; Ilarslan, K.; Nesovic, E. On null pseudo null Mannheim curves in Minkowski 3-space. J. Geom. 2014, 105, 177–183. [Google Scholar] [CrossRef]
- Kiziltug, S.; Yayli, Y. Bertrand Curves of AW(k)-type in the Equiform Geometry of the Galilean Space. Abstr. Appl. Anal. 2014, 2014, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Walrave, J. Curves and Surfaces in Minkowski Space. Doctoral Thesis, K. U. Leuven, Faculty of Science, Leuven, Belgium, 1995. [Google Scholar]
- ONeill, B. Semi-Riemannian Geometry with Applications to Relativity; Academic Press: New York, NY, USA, 1983. [Google Scholar]
- Ilarslan, K. Spacelike Normal Curves in Minkowski Space. Turkish J. Math. 2005, 29, 53–63. [Google Scholar]
- Ilarslan, K.; Nesovic, E. Timelike and null normal curves in Minkowski space. Indian J. Pure Appl. Math. 2004, 35, 881–888. [Google Scholar]
- Elsayied, H.K.; Elzawy, M.; Elsharkawy, A. Equiform spacelike normal curves according to equiform-Bishop frame in E13. Math. Meth. Appl. Sci. 2018, 41, 5754–5760. [Google Scholar] [CrossRef]
- Elsayied, H.K.; Elzawy, M.; Elsharkawy, A. Equiform timelike normal curves in Minkowski spac E13. Far East J. Math. Sci. 2017, 101, 1619–1629. [Google Scholar]
- Elsharkawy, A. Generalized involute and evolute curves of equiform spacelike curves with a timelike equiform principal normal in E13. J. Egypt. Math. Soc. 2020, 28, 1–10. [Google Scholar] [CrossRef]
- Aydın, M.; Ergüt, M. The equiform differential geometry of curves in 4-dimensional Galilean space G4. Stud. Univ. Babeș-Bolyai Math. 2013, 58, 399–406. [Google Scholar]
- Ozturk, U.; Ozturk, E.B.K.; Ilarslan, K. On the involute-Evolute of the Pseudonull Curve in Minkowski 3-Space. J. Appl. Math. 2013, 2013, 1–6. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tashkandy, Y.; Emam, W.; Cesarano, C.; Abd El-Raouf, M.M.; Elsharkawy, A. Generalized Spacelike Normal Curves in Minkowski Three-Space. Mathematics 2022, 10, 4145. https://doi.org/10.3390/math10214145
Tashkandy Y, Emam W, Cesarano C, Abd El-Raouf MM, Elsharkawy A. Generalized Spacelike Normal Curves in Minkowski Three-Space. Mathematics. 2022; 10(21):4145. https://doi.org/10.3390/math10214145
Chicago/Turabian StyleTashkandy, Yusra, Walid Emam, Clemente Cesarano, M. M. Abd El-Raouf, and Ayman Elsharkawy. 2022. "Generalized Spacelike Normal Curves in Minkowski Three-Space" Mathematics 10, no. 21: 4145. https://doi.org/10.3390/math10214145