
Numerical Method for System Level Simulation of Long-Distance Pneumatic Conveying Pipelines
Abstract
:1. Introduction
2. Mathematical Model
2.1. Air Flow
2.2. Capsule Movement
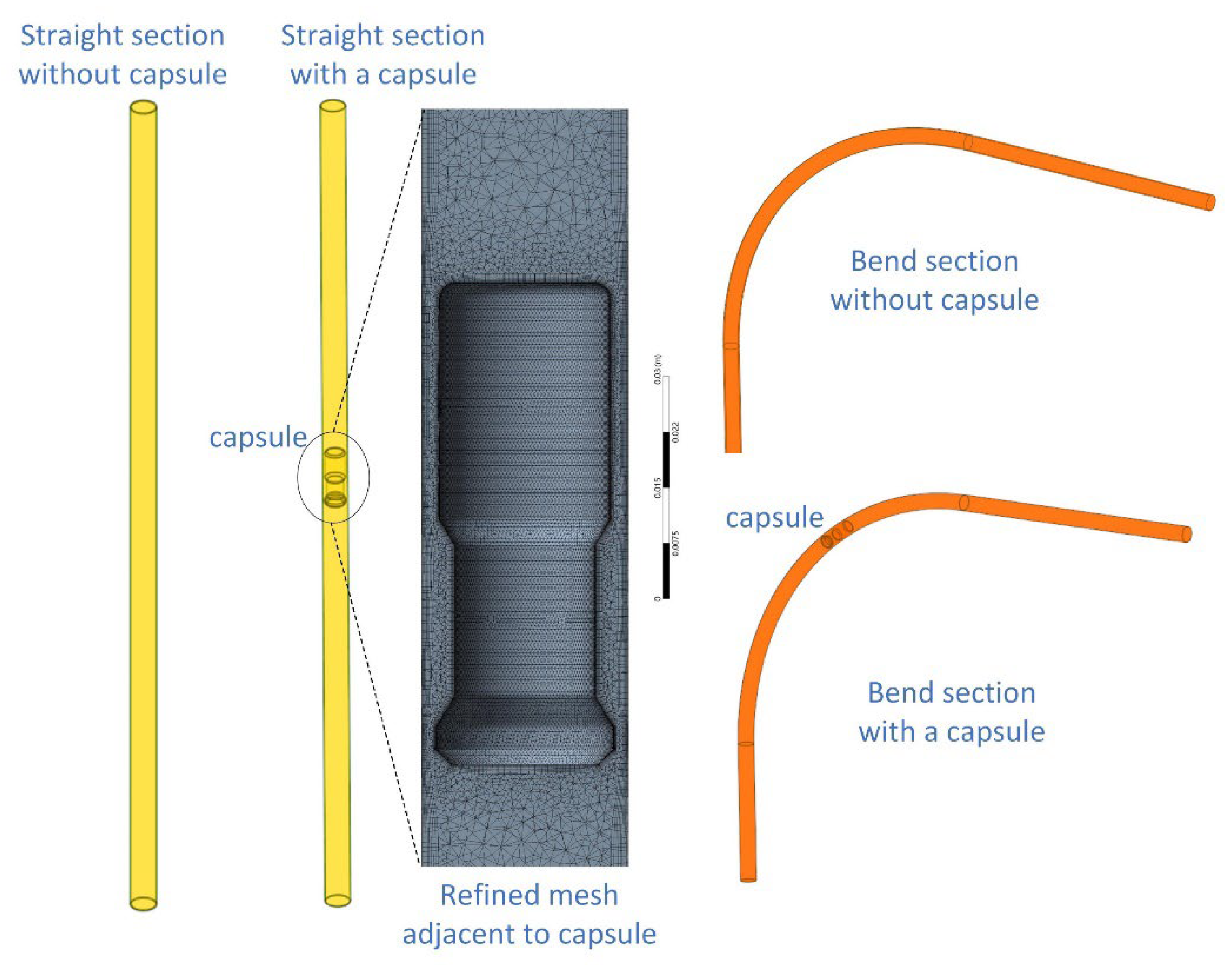
3. Numerical Method
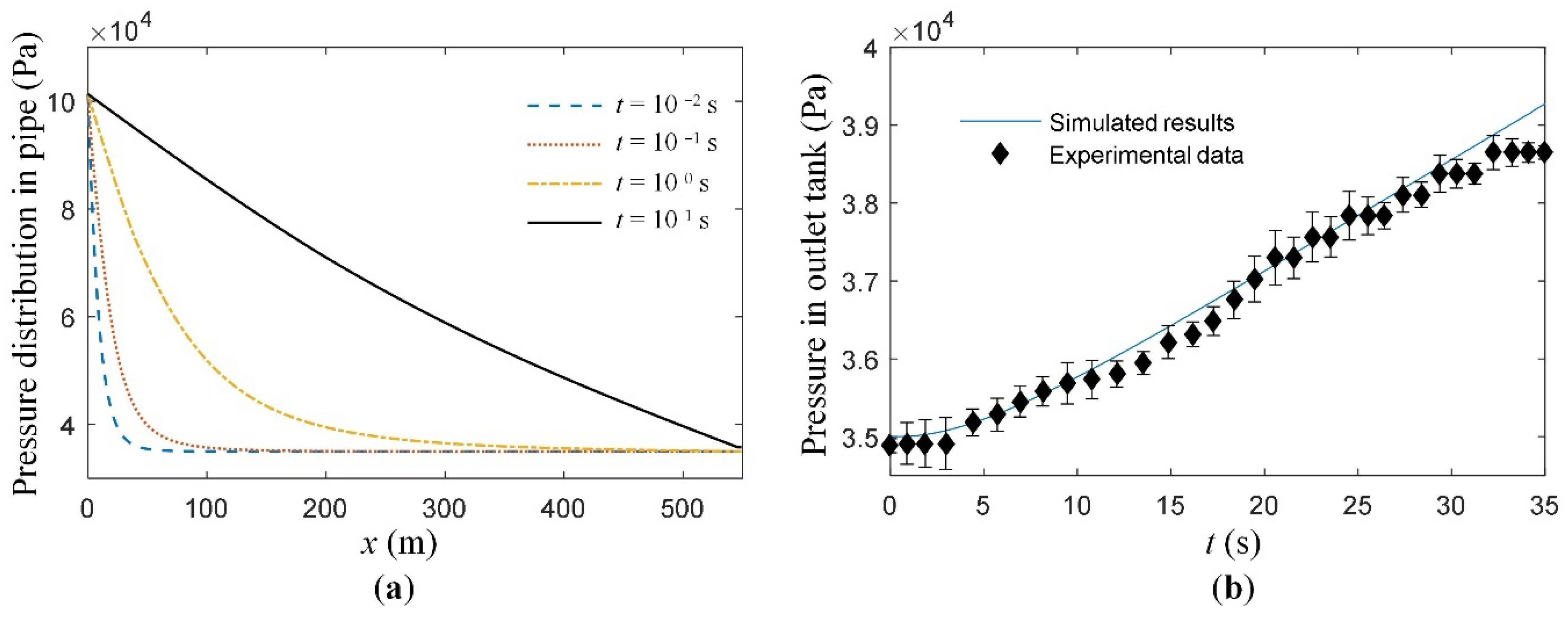
4. Application and Validation
4.1. Case 1
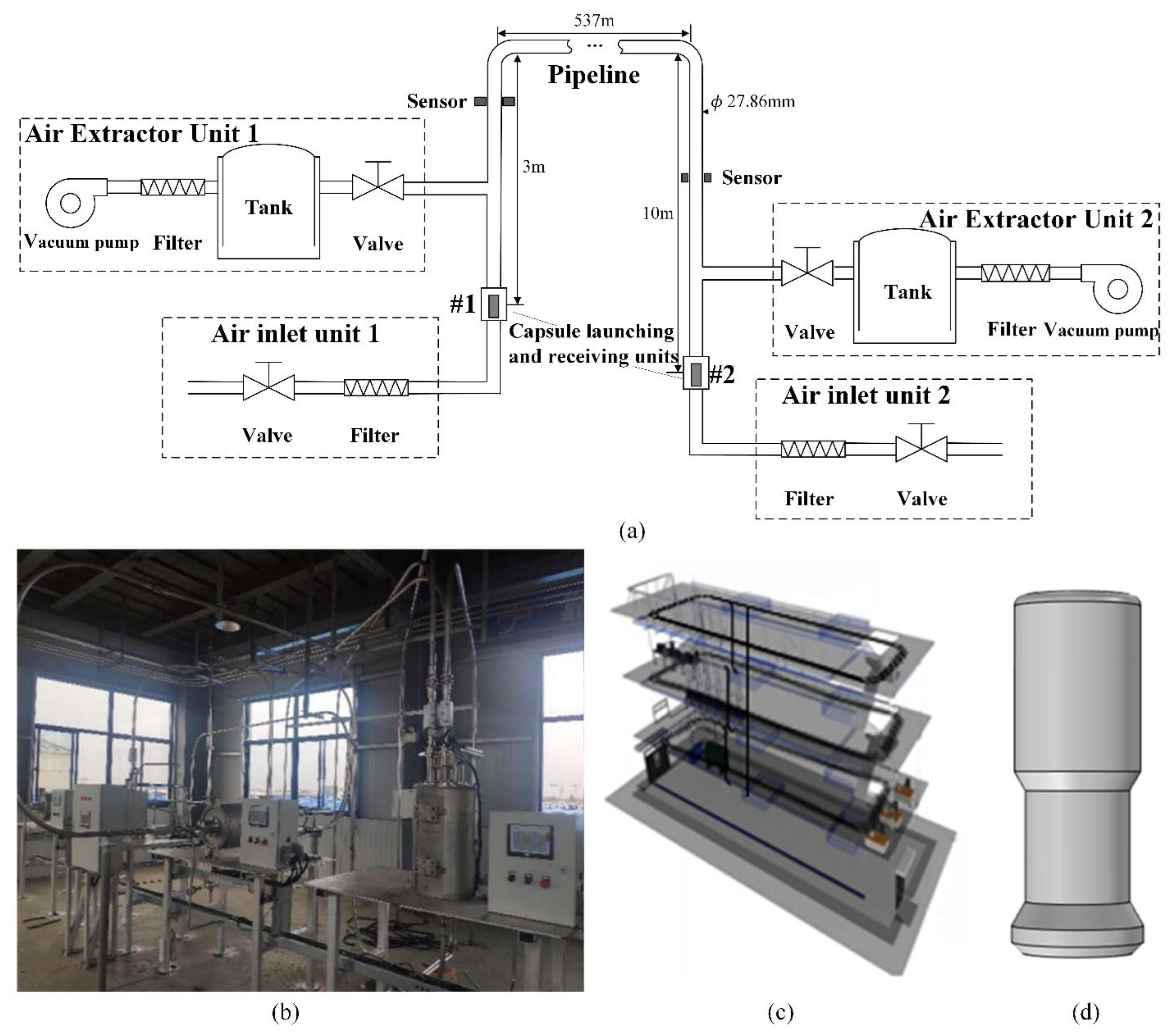
4.1.1. System Configuration
4.1.2. Determination of the Coefficients
4.1.3. Numerical Setting
4.2. Case 2
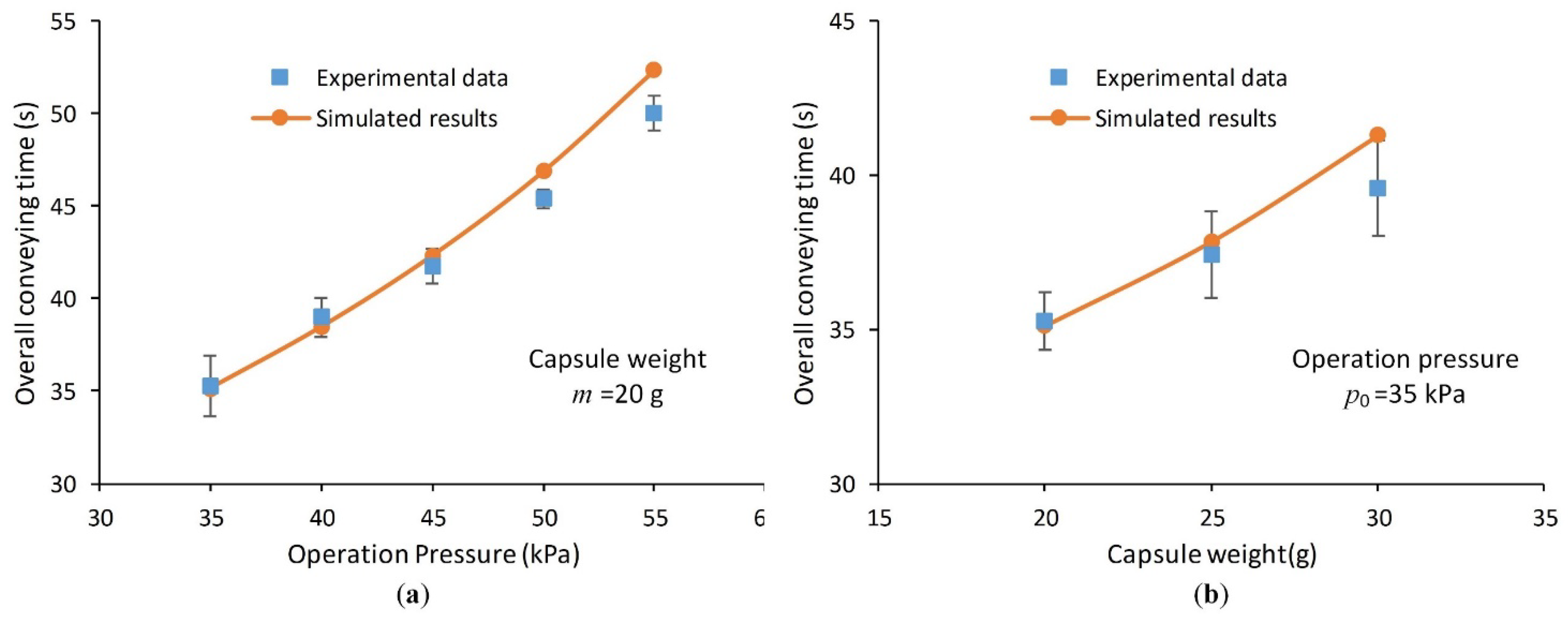
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kosugi, S. A Capsule Pipeline System for Limestone Transport. In Proceedings of the 4th International Conference on Bulk Materials, Storage, Handling and Transportation: 7th International Symposium on Freight Pipelines, Wollongong, Australia, 6–8 July 1992; Volume 7, pp. 13–17. [Google Scholar] [CrossRef]
- Hane, K.; Okutsu, K.; Matsui, N.; Kosugi, S. Applicability of pneumatic capsule pipeline system to radioactive waste diposal facility. In Proceedings of the WM’02 Conference, Tucson, AZ, USA, 24–28 February 2002. [Google Scholar]
- Hidalgo, D.; Martín-Marroquín, J.M.; Corona, F.; Juaristi, J.L. Sustainable vacuum waste collection systems in areas of difficult access. Tunn. Undergr. Space Technol. 2018, 81, 221–227. [Google Scholar] [CrossRef]
- Farré, J.A.; Salgado-Pizarro, R.; Martín, M.; Zsembinszki, G.; Gasia, J.; Cabeza, L.F.; Barreneche, C.; Fernández, A.I. Case study of pipeline failure analysis from two automated vacuum collection system. Waste Manag. 2021, 126, 643–651. [Google Scholar] [CrossRef] [PubMed]
- Liu, H. Pneumatic capsule pipeline-basic concept, practical considerations, and current research. Mid-Cont. Transp. Symp. 2000, 230, 230–234. [Google Scholar]
- Shibani, W.M.; Zulkafli, M.F.; Basuno, B. Methods of transport technologies: A review on using tube/tunnel systems. IOP Conf. Ser. Mater. Sci. Eng. 2016, 160, 012042. [Google Scholar] [CrossRef]
- Okutsu, K.; Esaki, T.; Matsui, N.; Fukunaga, T.; Saito, K. Comprehensive pneumatic transportation system for geological disposal facilities. In Proceedings of the WM’04 Conference, Tucson, AZ, USA, 29 February–4 March 2004. [Google Scholar]
- Turkowski, M.; Szudarek, M. Pipeline system for transporting consumer goods, parcels and mail in capsules. Tunn. Undergr. Space Technol. 2019, 93, 103057. [Google Scholar] [CrossRef]
- Kosugi, S. Pneumatic capsule pipelines in Japan and future developments. Handb. Powder Technol. 2001, 10, 501–511. [Google Scholar] [CrossRef]
- Belova, O.V.; Vulf, M.D. Pneumatic capsule transport. Procedia Eng. 2016, 152, 276–280. [Google Scholar] [CrossRef] [Green Version]
- York, K.; Liu, H. Predicting drag coefficient of pneumatic capsule. J. Transp. Eng. 2001, 127, 390–397. [Google Scholar] [CrossRef]
- Kosugi, S. Effect of traveling resistance factor on pneumatic capsule pipeline system. Powder Technol. 1999, 104, 227–232. [Google Scholar] [CrossRef]
- Ohashi, A.; Yanaida, K. The fluid mechanics of capsule pipelines: 1st report, analysis of the required pressure drop for hydraulic and pneumatic capsules. Bull. JSME 1986, 29, 1719–1725. [Google Scholar] [CrossRef]
- Ohashi, A.; Yanaida, K. The fluid mechanics of capsule pipelines: 2nd report, analysis of the pressure loss in concentric capsules, pipelines and annular pipes. Bull. JSME 1986, 29, 4156–4163. [Google Scholar] [CrossRef] [Green Version]
- Ohashi, A.; Yanaida, K. The fluid mechanics of capsule pipelines: 3rd report, analysis of the pressure loss in eccentric capsules pipelines and eccentric annular pipes. Bull. JSME 1986, 29, 3779–3786. [Google Scholar] [CrossRef]
- Liu, H.; Kosugi, S. Use of Pneumatic Capsule Pipeline for Underground Tunneling. In Proceedings of the 12th International Symposium on Freight Pipelines, Prague, Czech Republic, 20–24 September 2004. [Google Scholar]
- Liu, H. Feasibility of Using Pneumatic Capsule Pipelines in New York City for Underground Freight Transport. In Proceedings of the ASCE Pipeline Division Specialty Congress, San Diego, CA, USA, 1–4 August 2004; pp. 1–12. [Google Scholar]
- Morikawa, Y.; Tsuji, Y.; Chono, S.; Yoshida, H. A Fundamental Investigation of the Capsule Transport: 3rd Report, Friction of Capsule Wheels and Transport Experiment of a Single Capsule. Bull. JSME 1984, 27, 2181–2187. [Google Scholar] [CrossRef] [Green Version]
- Tsuji, Y.; Morikawa, Y.; Chono, S.; Imae, H.; Yoshikawa, T. A Fundamental Investigation of the Capsule Transport: 4th Report, Numerical Analysis of Motion of Accelerating and Decelerating Capsules. Bull. JSME 1985, 28, 1128–1134. [Google Scholar] [CrossRef] [Green Version]
- Tomita, Y. Numerical analysis of pneumatic capsule pipeline system: Continuous loading with short intervals. Bull. JSME 1985, 28, 2480–2481. [Google Scholar] [CrossRef]
- Wee Chuan Lim, E.; Wang, C.-H.; Yu, A.-B. Discrete element simulation for pneumatic conveying of granular material. AIChE J. 2006, 52, 496–509. [Google Scholar] [CrossRef]
- Wang, Y.; Williams, K.; Jones, M.; Chen, B. CFD simulation methodology for gas-solid flow in bypass pneumatic conveying—A review. Appl. Therm. Eng. 2017, 125, 185–208. [Google Scholar] [CrossRef]
- Miao, Z.; Kuang, S.; Zughbi, H.; Yu, A. CFD simulation of dilute-phase pneumatic conveying of powders. Powder Technol. 2019, 349, 70–83. [Google Scholar] [CrossRef]
- Nguyen, D.; Rasmuson, A.; Niklasson Björn, I.; Thalberg, K. CFD simulation of transient particle mixing in a high shear mixer. Powder Technol. 2014, 258, 324–330. [Google Scholar] [CrossRef]
- Kuang, S.; Zhou, M.; Yu, A. CFD-DEM modelling and simulation of pneumatic conveying: A review. Powder Technol. 2020, 365, 186–207. [Google Scholar] [CrossRef]
- Shi, Q.; Sakai, M. Recent progress on the discrete element method simulations for powder transport systems: A review. Adv. Powder Technol. 2022, 33, 103664. [Google Scholar] [CrossRef]
- Towler, G.; Sinnott, R. Chapter 18-Specification and design of solids-handling equipment. In Chemical Engineering Design, 3rd ed.; Towler, G., Sinnott, R., Eds.; Butterworth-Heinemann: Oxford, UK, 2022; pp. 735–821. [Google Scholar]
- Huber, N.; Sommerfeld, M. Modelling and numerical calculation of dilute-phase pneumatic conveying in pipe systems. Powder Technol. 1998, 99, 90–101. [Google Scholar] [CrossRef]
- Tashiro, H.; Peng, X.; Tomita, Y. Numerical prediction of saltation velocity for gas-solid two-phase flow in a horizontal pipe. Powder Technol. 1997, 91, 141–146. [Google Scholar] [CrossRef]
- Levy, A. Two-fluid approach for plug flow simulations in horizontal pneumatic conveying. Powder Technol. 2000, 112, 263–272. [Google Scholar] [CrossRef]
- Tsuji, Y.; Tanaka, T.; Ishida, T. Lagrangian numerical simulation of plug flow of cohesionless particles in a horizontal pipe. Powder Technol. 1992, 71, 239–250. [Google Scholar] [CrossRef]
- Le, T.T.G.; Jang, K.S.; Lee, K.-S.; Ryu, J. Numerical Investigation of Aerodynamic Drag and Pressure Waves in Hyperloop Systems. Mathematics 2020, 8, 1973. [Google Scholar] [CrossRef]
- Al-Obaidi, A.R. Numerical investigation on effect of various pump rotational speeds on performance of centrifugal pump based on CFD analysis technique. Int. J. Model. Simul. Sci. Comput. 2021, 12, 2150045. [Google Scholar] [CrossRef]
- Al-Obaidi, A.R.; Qubian, A. Effect of outlet impeller diameter on performance prediction of centrifugal pump under single-phase and cavitation flow conditions. Int. J. Nonlinear Sci. Numer. Simul. 2022. [Google Scholar] [CrossRef]
- Feng, J.; Huang, P.Y.; Joseph, D.D. Dynamic simulation of the motion of capsules in pipelines. J. Fluid Mech. 1995, 286, 201–227. [Google Scholar] [CrossRef]
- Asim, T.; Mishra, R. Computational fluid dynamics based optimal design of hydraulic capsule pipelines transporting cylindrical capsules. Powder Technol. 2016, 295, 180–201. [Google Scholar] [CrossRef]
- Dupont, C.; Le Tallec, P.; Barthès-Biesel, D.; Vidrascu, M.; Salsac, A.-V. Dynamics of a spherical capsule in a planar hyperbolic flow: Influence of bending resistance. Procedia IUTAM 2015, 16, 70–79. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, X.; Li, Y.; Zhang, X.; Zhang, X.; Yang, X.; Li, F. Hydraulic characteristics of transporting a piped carriage in a horizontal pipe based on the bidirectional fluid-structure interaction. Math. Probl. Eng. 2018, 2018, 8317843. [Google Scholar] [CrossRef]
- Abushaala, S.; Shaneb, A.; Enbais, F.; Abulifa, A. Hydrodynamic analysis of pipelines transporting capsule for onshore applications. Int. J. Eng. Inf. Technol. 2018, 5, 53–62. [Google Scholar]
- Khani, D.; Lim, Y.H.; Malekpour, A. Calculating Column Separation in Liquid Pipelines Using a 1D-CFD Coupled Model. Mathematics 2022, 10, 1960. [Google Scholar] [CrossRef]
- Herrán-González, A.; De La Cruz, J.M.; De Andrés-Toro, B.; Risco-Martín, J.L. Modeling and simulation of a gas distribution pipeline network. Appl. Math. Model. 2009, 33, 1584–1600. [Google Scholar] [CrossRef]
- Yuan, Z.; Deng, Z.; Jiang, M.; Xie, Y.; Wu, Y. A modeling and analytical solution for transient flow in natural gas pipelines with extended partial blockage. J. Nat. Gas Sci. Eng. 2015, 22, 141–149. [Google Scholar] [CrossRef]
- Patankar, S.V. Numerical Heat Transfer and Fluid Flow; Hemisphere Publishing Corporation: London, UK, 1980. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Size (mm) | No. of Elements | Pressure Drop (Pa) | Viscous FORCE (N) | |
|---|---|---|---|---|
| s1 | s2 | |||
| 2.9 | 0.9 | 166,097 | 1480.08 | 10.14 |
| 2.0 | 0.6 | 572,800 | 1823.02 | 12.50 |
| 1.5 | 0.3 | 1,539,626 | 1874.23 | 12.93 |
| Pipe Sections Types | k1 (×106 kg−1 m−2) | k2 (×103 m−2 s−1) | |
|---|---|---|---|
| Straight | with a capsule | −13.19 | −10.95 |
| without capsule | −0.78 | −1.45 | |
| Bend | with a capsule | −24.06 | −33.99 |
| without capsule | −0.84 | −2.19 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Fang, F.; Li, Y. Numerical Method for System Level Simulation of Long-Distance Pneumatic Conveying Pipelines. Mathematics 2022, 10, 4073. https://doi.org/10.3390/math10214073
Zhou X, Fang F, Li Y. Numerical Method for System Level Simulation of Long-Distance Pneumatic Conveying Pipelines. Mathematics. 2022; 10(21):4073. https://doi.org/10.3390/math10214073
Chicago/Turabian StyleZhou, Xiaoming, Fang Fang, and Yadong Li. 2022. "Numerical Method for System Level Simulation of Long-Distance Pneumatic Conveying Pipelines" Mathematics 10, no. 21: 4073. https://doi.org/10.3390/math10214073