
Bifurcation and Patterns Analysis for a Spatiotemporal Discrete Gierer-Meinhardt System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Stability Analysis
3. Bifurcation Analysis
3.1. Flip Bifurcation
3.2. Neimark–Sacker Bifurcation
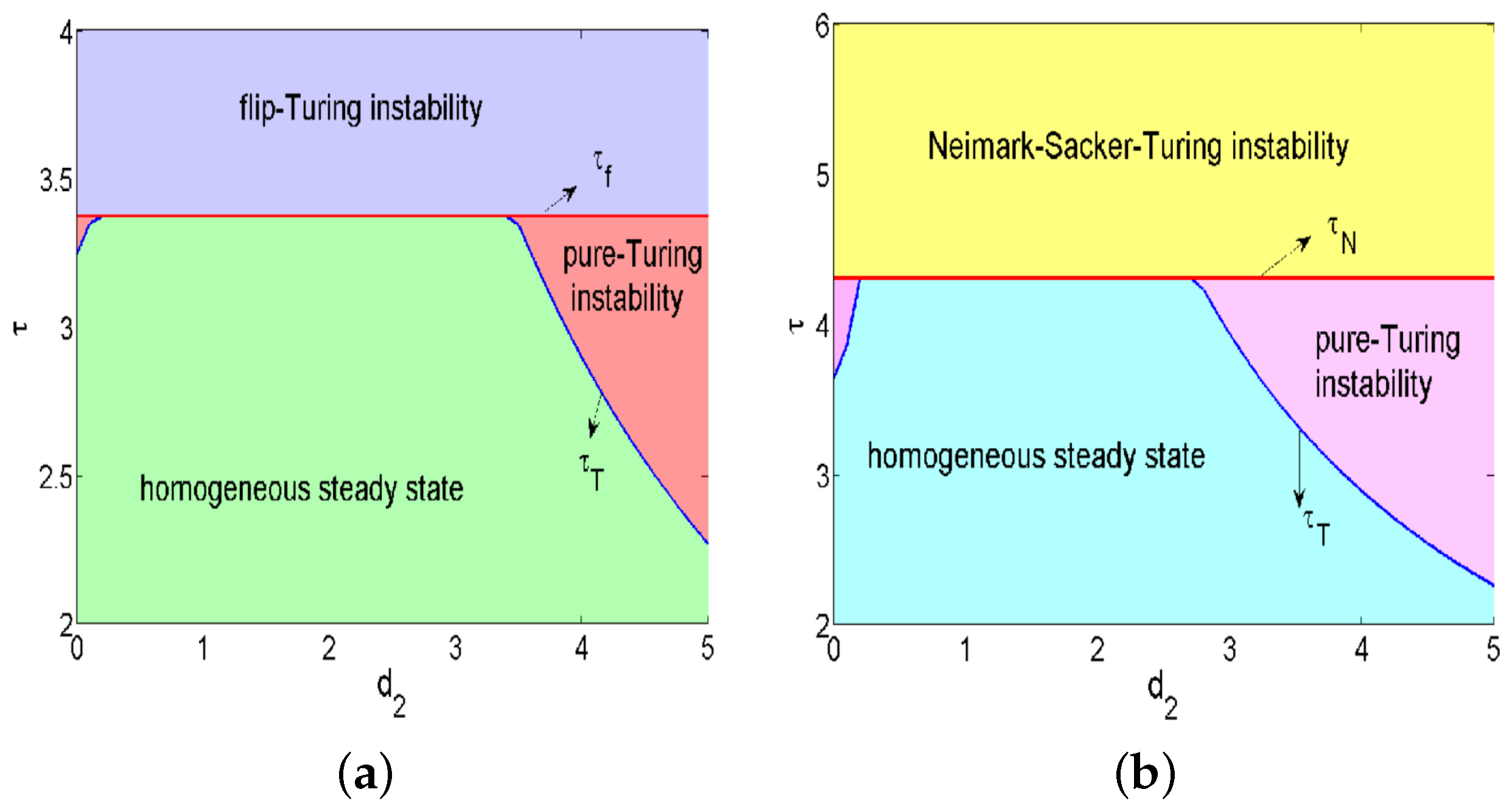
3.3. Turing Bifurcation
4. Numerical Simulations
4.1. The Dynamics Behaviors for Spatially Homogeneous State
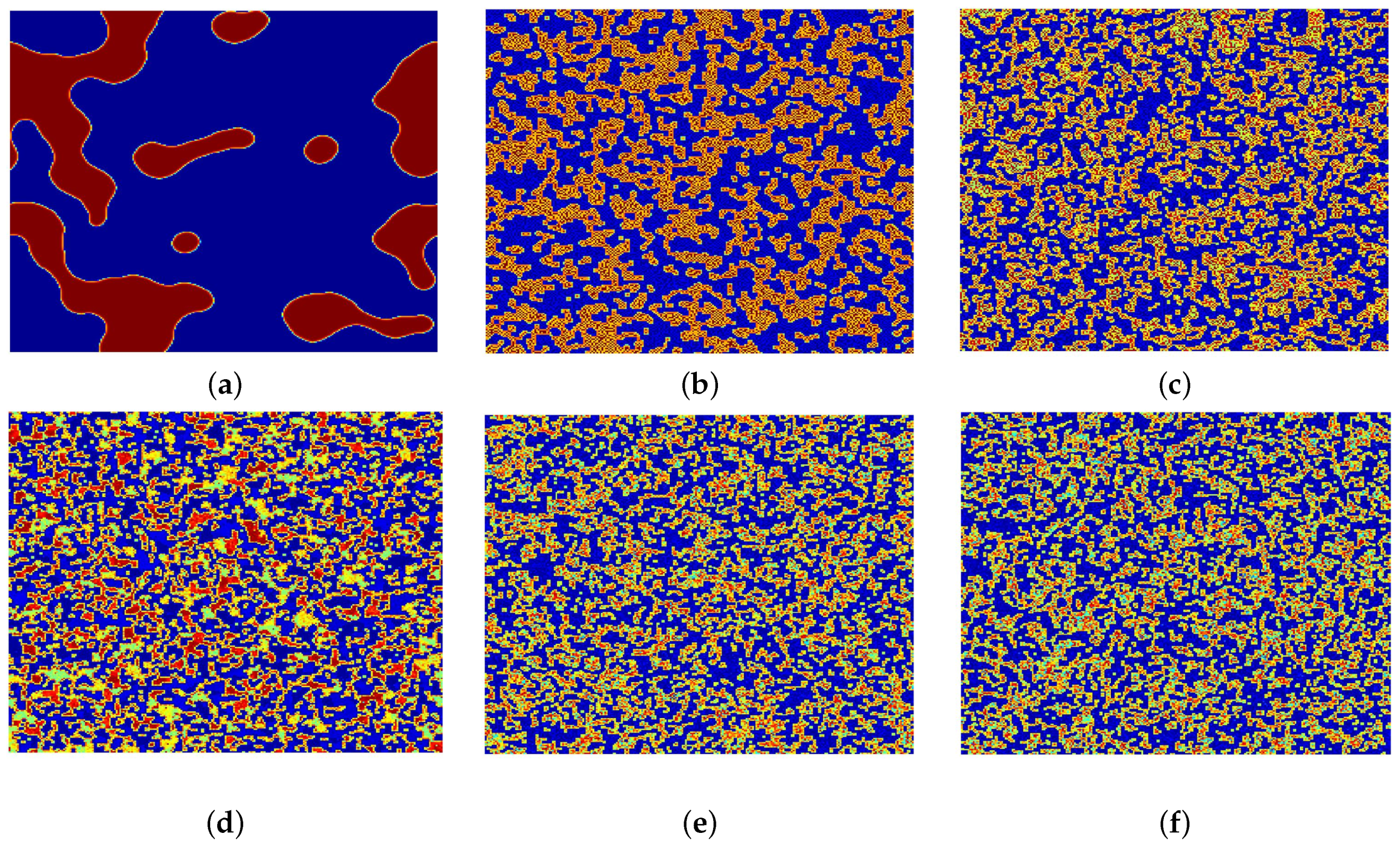
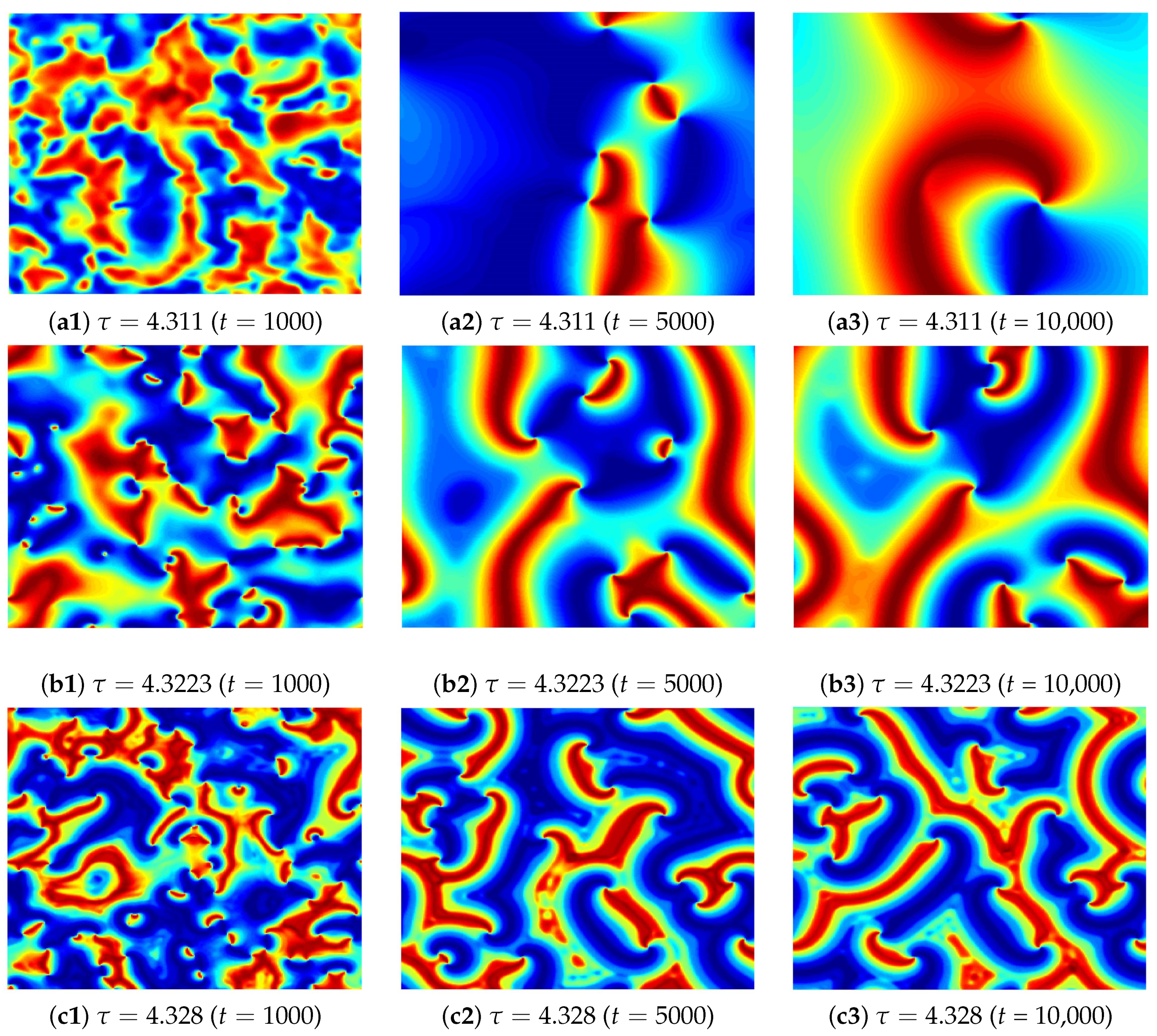
4.2. The Dynamics Behaviors for Spatially Heterogenous State
5. Conclusions and Future Direction
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Turing, A. The chemical basis of morphogenesis. Philos. Trans. R. Soc. Bull. Biol. Sci. 1952, 237, 37–72. [Google Scholar]
- Han, Y.; Han, B.; Zhang, L.; Xu, L.; Li, M.F.; Zhang, G. Turing instability and wave patterns for a symmetric discrete competitive Lotka-Volterra system. WSEAS Trans. Math. 2011, 10, 181–189. [Google Scholar]
- Liu, B.; Wu, R.; Chen, L. Turing-Hopf bifurcation analysis in a superdiffusive predator-prey model. Chaos 2018, 28, 113118. [Google Scholar] [CrossRef]
- Liu, B.; Wu, R.; Iqbal, N.; Chen, L. Turing patterns in the Lengyel-Epstein system with superdiffusion. Int. J. Bifurcat. Chaos 2017, 27, 1730026. [Google Scholar] [CrossRef]
- Iqbal, N.; Wu, R.; Liu, B. Pattern formation by super-diffusion in FitzHugh-Nagumo model. Appl. Math. Comput. 2017, 313, 245–258. [Google Scholar] [CrossRef]
- Gierer, A.; Meinhardt, H. A theory of biological pattern formation. Kybernetik 1972, 12, 30–39. [Google Scholar] [CrossRef] [Green Version]
- Ward, M.J.; Wei, J. Hopf bifurcations and oscillatory instabilities of spike solutions for the one-dimensional Gierer-Meinhardt model. J. Nonlinear Sci. 2003, 13, 209–264. [Google Scholar] [CrossRef]
- Wei, J.; Winter, M. On the two-dimensional Gierer-Meinhardt system with strong coupling. SIAM J. Math. Anal. 1999, 30, 1241–1263. [Google Scholar] [CrossRef]
- Ruan, S. Diffusion-driven instability in the Gierer-Meinhardt model of morphogenesis. Nat. Resour. Model. 1998, 11, 131–141. [Google Scholar] [CrossRef]
- Wang, J.; Hou, X.; Jing, Z. Stripe and spot patterns in a Gierer-Meinhardt activator-inhibitor model with different sources. Int. J. Bifuru. Chaos 2015, 25, 1550108. [Google Scholar] [CrossRef]
- Mai, F.; Qin, L.; Zhang, G. Turing instability for a semi-discrete Gierer-Meinhardt system. Physica A 2012, 391, 2014–2022. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Zhong, S.; Hou, X. Analysis of bifurcation, chaos and pattern formation in a discrete time and space Gierer Meinhardt system. Chaos Solitons Fract. 2019, 118, 1–17. [Google Scholar] [CrossRef]
- Liu, J.; Yi, F.; Wei, J. Multiple bifurcation analysis and spatiotemporal patterns in a 1-D Gierer-Meinhardt model of morphogenesis. Int. J. Bifuru. Chaos 2010, 20, 1007–1025. [Google Scholar] [CrossRef]
- Li, Y.; Wang, J.; Hou, X. Stripe and spot patterns for the Gierer-Meinhardt model with saturated activator production. J. Math. Anal. Appl. 2017, 449, 1863–1879. [Google Scholar] [CrossRef]
- Wu, R.; Zhou, Y.; Shao, Y.; Chen, L. Bifurcation and Turing patterns of reaction-diffusion activator-inhibitor model. Physica A 2017, 482, 597–610. [Google Scholar] [CrossRef]
- Lee, S.S.; Gaffney, E.; Monk, N. The influence of gene expression time delays on Gierer-Meinhardt pattern formation systems. Bull. Math. Biol. 2010, 72, 2139–2160. [Google Scholar]
- Wei, J.; Yang, W. Multi-bump ground states of the fractional Gierer-Meinhardt system on the real line. J. Dyn. Diff. Equ. 2019, 31, 385–417. [Google Scholar] [CrossRef]
- Domokos, G.; Scheuring, I. Discrete and continuous state population models in a noisy world. J. Theor. Biol. 2004, 227, 535–545. [Google Scholar] [CrossRef] [Green Version]
- Koch, A.J.; Meinhardt, H. Biological pattern formation: From basic mechanisms to complex structures. Rev. Mod. Phys. 1994, 66, 1481. [Google Scholar] [CrossRef]
- Meinhardt, H. Models of Biological Pattern Formation; Academic Press: Cambridge, MA, USA, 1982. [Google Scholar]
- Meinhardt, H. The Algorithmic Beauty of Sea Shells; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Punithan, D.; Kim, D.K.; McKay, R. Spatio-temporal dynamics and quantification of daisyworld in two-dimensional coupled map lattices. Ecol. Complex. 2012, 12, 43–57. [Google Scholar] [CrossRef]
- Jing, Z.; Yang, J. Bifurcation and chaos in discrete-time predator-prey system. Chaos Solitons Fract. 2006, 27, 259–277. [Google Scholar] [CrossRef]
- Liu, X.; Xiao, D. Complex dynamic behaviors of a discrete-time predator-prey system. Chaos Solitons Fract. 2007, 32, 80–94. [Google Scholar] [CrossRef]
- Rodrigues, L.A.D.; Mistro, D.C.; Petrovskii, S. Pattern formation in a space- and time-discrete predator-prey system with a strong allee effect. Theor. Ecol. 2011, 5, 341–362. [Google Scholar] [CrossRef]
- Bai, L.; Zhang, G. Nontrivial solutions for a nonlinear discrete elliptic equation with periodic boundary conditions. Appl. Math. Comput. 2009, 210, 321–333. [Google Scholar] [CrossRef]
- Zhong, S.; Wang, J.; Li, Y.; Jiang, N. Bifurcation, chaos and Turing instability analysis for a space-time discrete toxic phytoplankton-zooplankton model with self-diffusion, Internat. J. Bifurc. Chaos 2019, 29, 1950184. [Google Scholar] [CrossRef]
- Zhong, S.; Wang, J.; Bao, J.; Li, Y.; Jiang, N. Spatiotemporal complexity analysis for a space-time discrete generalized toxic-phytoplankton-zooplankton model with self-diffusion and cross-diffusion. Internat. J. Bifurc. Chaos 2021, 31, 2150006. [Google Scholar] [CrossRef]
- Zhang, F.; Zhou, W.; Yao, L.; Li, Y.; Jiang, N. Spatiotemporal patterns formed by a discrete nutrient-phytoplankton model with time delay. Complexity 2020, 31, 8541432. [Google Scholar] [CrossRef]
- Nakata, K.; Sokabe, M.; Suzuki, R. The application of the Gierer-Meinhardt equations to the development of the retinotectal projection. Biol. Cybern. 1979, 35, 235–241. [Google Scholar] [CrossRef]
- Huang, T.; Zhang, H. Chaos and pattern formation in a space- and time-discrete predator-prey system. Chaos Solitons Fract. 2016, 91, 92–107. [Google Scholar] [CrossRef]
- Wiggins, S. Introduction to Applied Nonlinear Dynamical Systems and Chaos, 2nd ed.; Spring Science + Business Media, LLC.: Berlin/Heidelberg, Germany, 1990; pp. 193–381. [Google Scholar]
- Guckenheimer, J.; Holmes, P. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields; Spring: Berlin/Heidelberg, Germany, 1983; pp. 117–165. [Google Scholar]
- Torabi, R.; Rezaei, Z. Instability in reaction-superdiffusion systems. Phys. Rev. E 2016, 94, 052202. [Google Scholar] [CrossRef] [Green Version]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Wu, R. Bifurcation and Patterns Analysis for a Spatiotemporal Discrete Gierer-Meinhardt System. Mathematics 2022, 10, 243. https://doi.org/10.3390/math10020243
Liu B, Wu R. Bifurcation and Patterns Analysis for a Spatiotemporal Discrete Gierer-Meinhardt System. Mathematics. 2022; 10(2):243. https://doi.org/10.3390/math10020243
Chicago/Turabian StyleLiu, Biao, and Ranchao Wu. 2022. "Bifurcation and Patterns Analysis for a Spatiotemporal Discrete Gierer-Meinhardt System" Mathematics 10, no. 2: 243. https://doi.org/10.3390/math10020243