

On Solving the Problem of Finding Kinetic Parameters of Catalytic Isomerization of the Pentane-Hexane Fraction Using a Parallel Global Search Algorithm

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Mathematical Model
3. Parallel Algorithm for Solving Global Optimization Problems
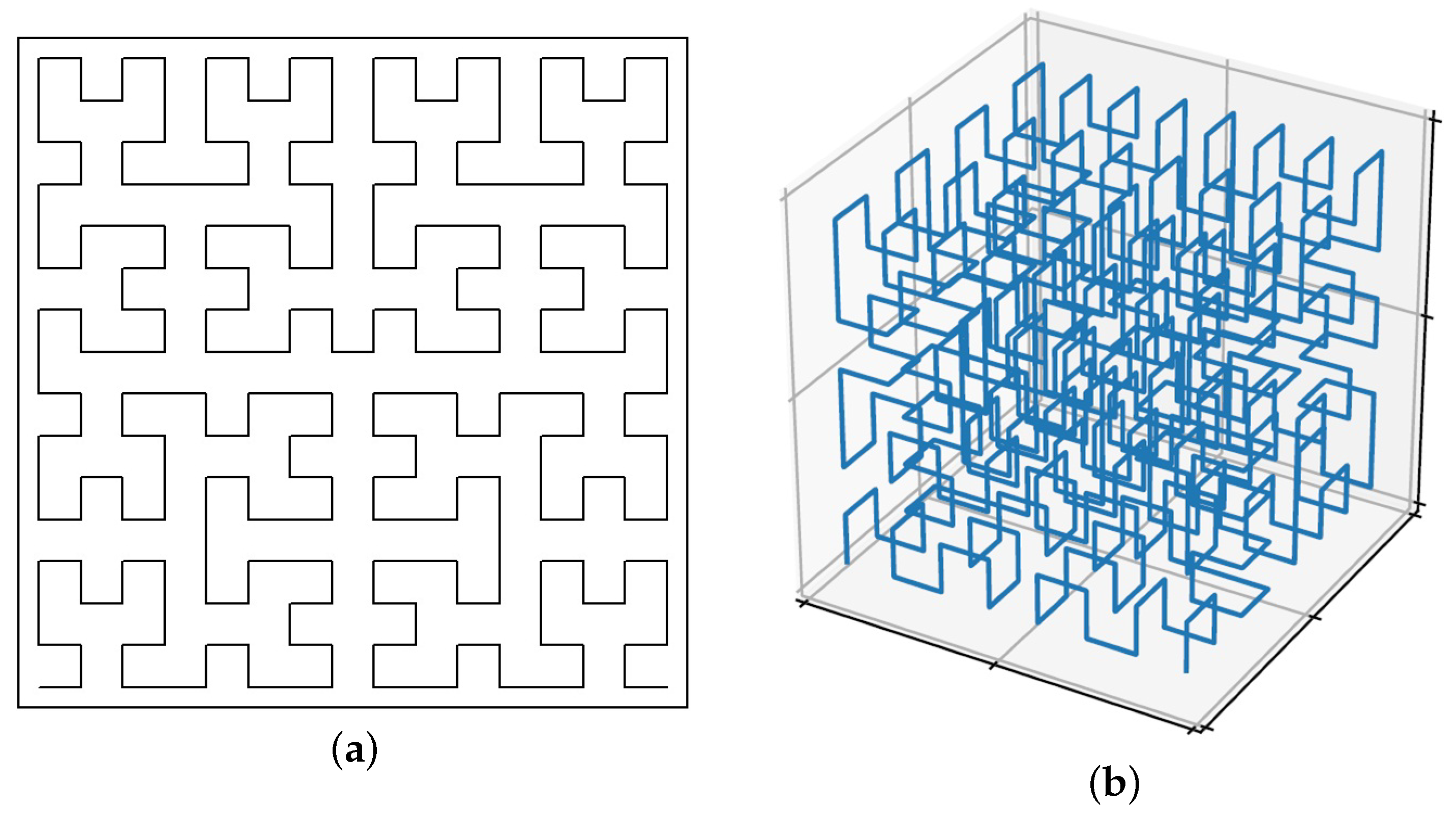
3.1. Statement of the Global Optimization Problem
3.2. Asynchronous Parallel Algorithm Used to Determine the Global Minimum of a Function
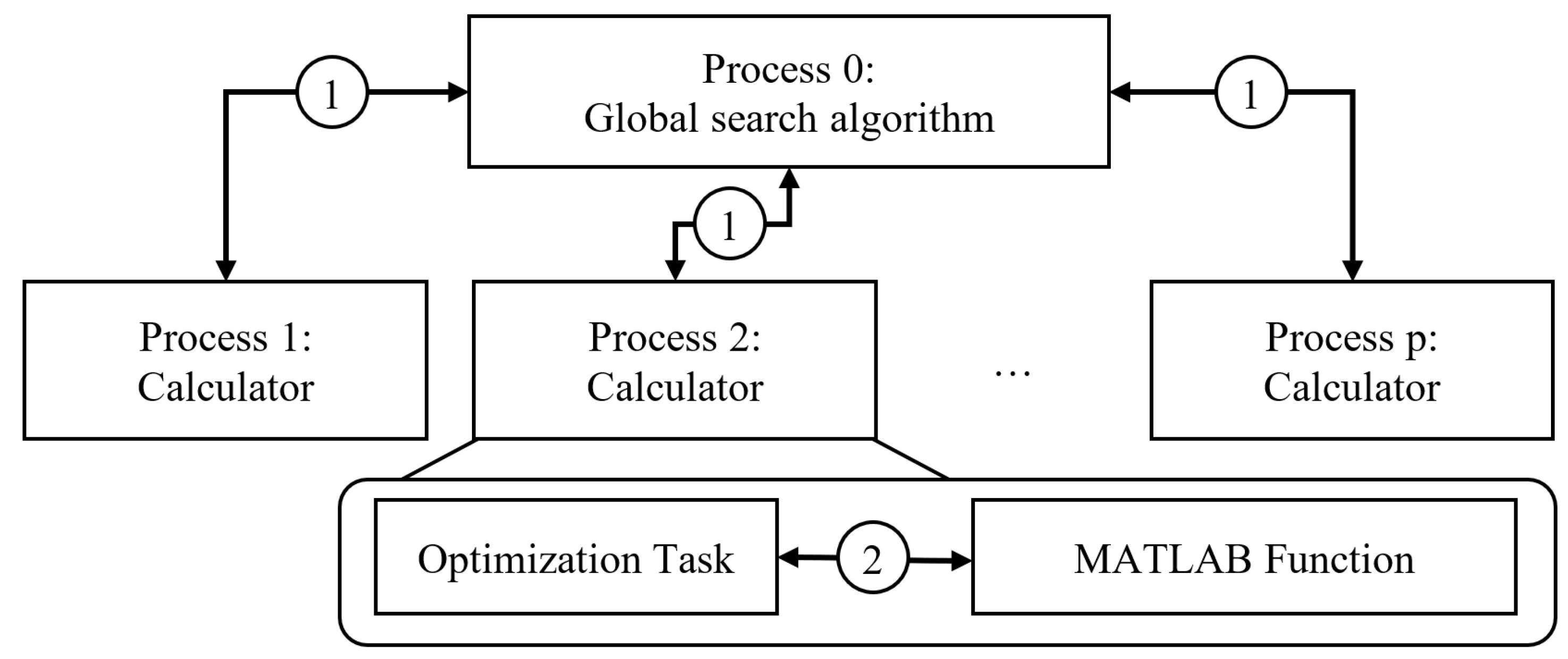
3.3. Features of the Software Implementation of the Parallel Algorithm
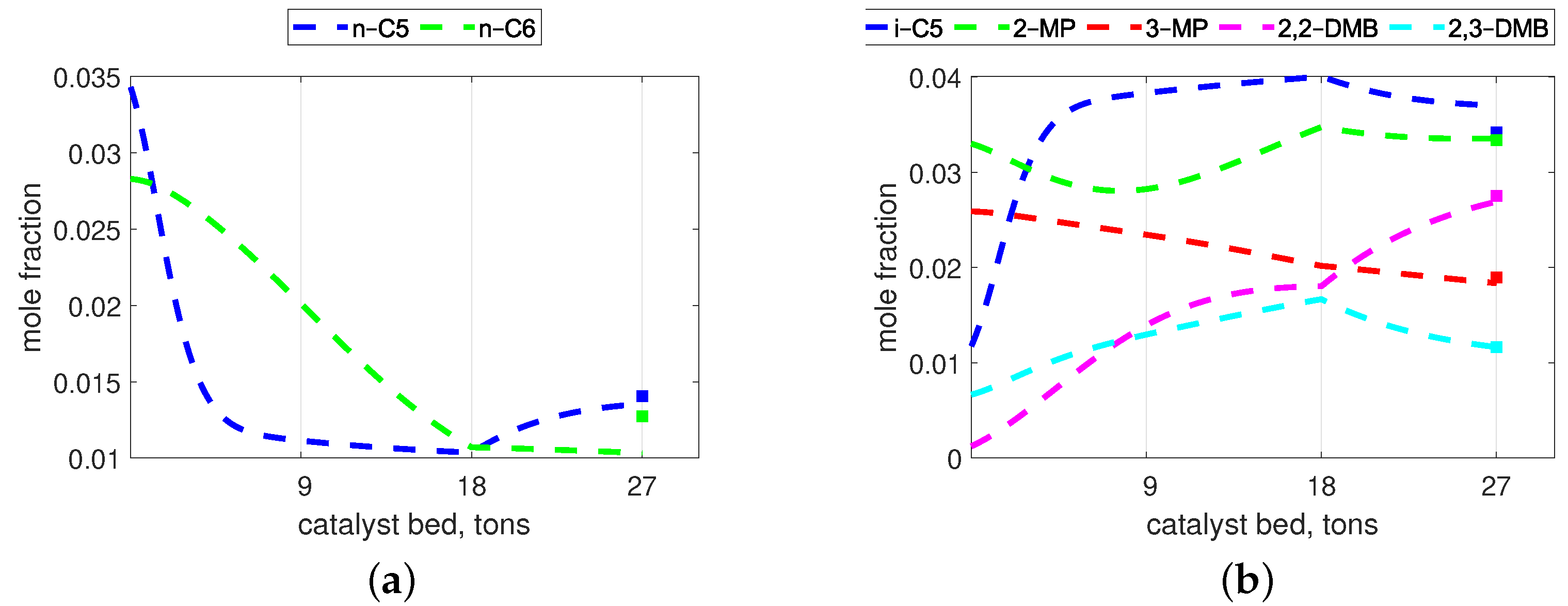
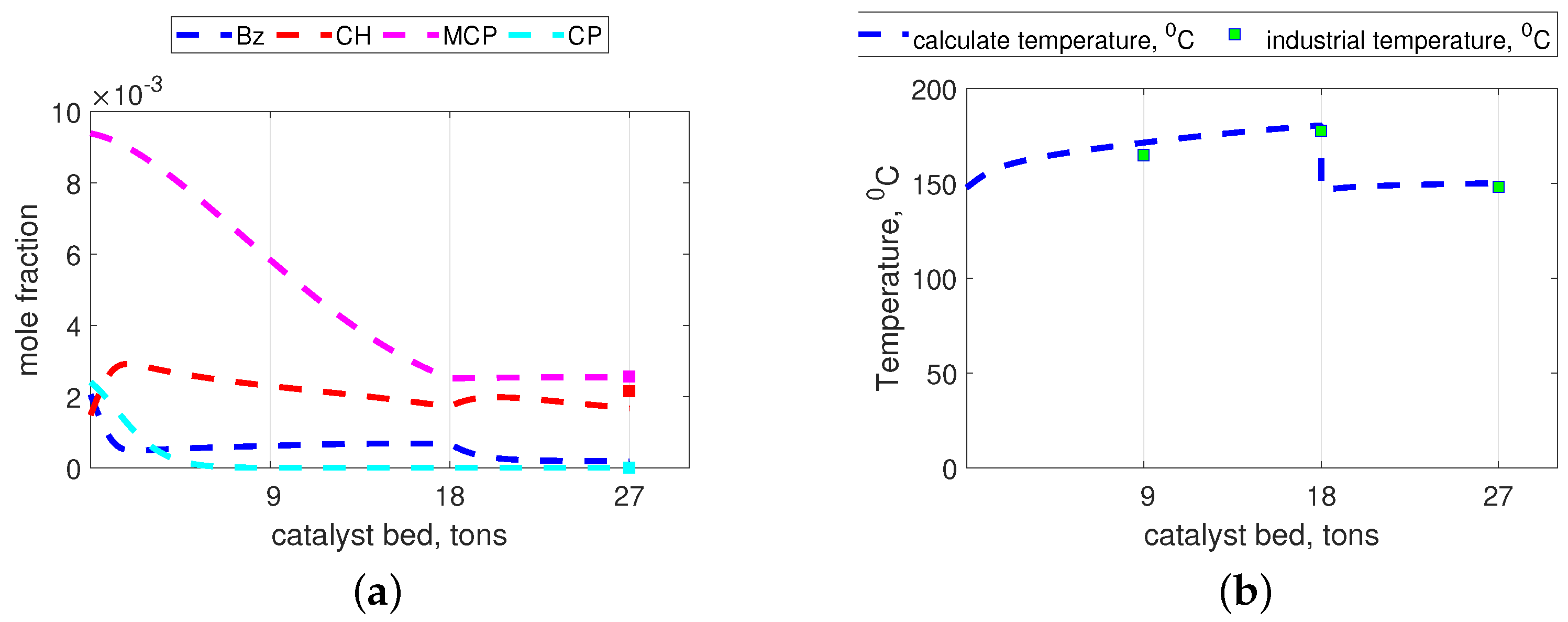
4. Numerical Experiments
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2-MP | 2-methylpentane |
| 3-MP | 3-methylpentane |
| 2,2-DMB | 2,2-dimethylbutane |
| 2,3-DMB | 2,3-dimethylbutane |
| CH* | cyclohexane |
| MCP | methylcyclopentane |
| B | benzene |
| CP | cyclopentane |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | E, kcal/mol | No | E, kcal/mol | ||
|---|---|---|---|---|---|
| 1 | 149.320 | 18.492 | 25 | 141.046 | 5.799 |
| 2 | 129.372 | 15.604 | 26 | 80.093 | 4.401 |
| 3 | 108.439 | 9.286 | 27 | 177.947 | 3.694 |
| 4 | 87.168 | 9.002 | 28 | 92.282 | 10.670 |
| 5 | 123.830 | 14.203 | 29 | 159.368 | 16.169 |
| 6 | 162.603 | 17.997 | 30 | 97.215 | 9.612 |
| 7 | 161.429 | 17.114 | 31 | 188.306 | 7.194 |
| 8 | 142.261 | 12.667 | 32 | 111.789 | 11.467 |
| 9 | 127.715 | 12.130 | 33 | 124.370 | 12.764 |
| 10 | 96.409 | 11.318 | 34 | 101.952 | 6.352 |
| 11 | 64.223 | 7.214 | 35 | 131.079 | 16.427 |
| 12 | 94.973 | 8.388 | 36 | 177.771 | 11.250 |
| 13 | 174.387 | 7.600 | 37 | 72.632 | 15.123 |
| 14 | 161.502 | 18.146 | 38 | 67.167 | 14.013 |
| 15 | 98.296 | 11.305 | 39 | 230.976 | 12.798 |
| 16 | 104.987 | 11.499 | 40 | 214.539 | 13.532 |
| 17 | 42.264 | 3.622 | 41 | 291.967 | 26.096 |
| 18 | 45.070 | 5.530 | 42 | 185.864 | 20.281 |
| 19 | 162.126 | 21.057 | 43 | 134.411 | 14.229 |
| 20 | 231.848 | 28.391 | 44 | 82.0120 | 8.262 |
| 21 | 245.107 | 28.488 | 45 | 388.331 | 17.056 |
| 22 | 204.298 | 23.176 | 46 | 286.722 | 18.898 |
| 23 | 53.493 | 5.911 | 47 | 356.242 | 5.148 |
| 24 | 252.728 | 1.600 | 48 | 355.642 | 9.141 |
References
- Weyda, H.; Köhler, E. Modern refining concepts—An update on naphtha-isomerization to modern gasoline manufacture. Catal. Today 2003, 81, 51–55. [Google Scholar] [CrossRef]
- Fahim, M.; Alsahhaf, T.; Elkilani, A. Fundamentals of Petroleum Refining; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Meyers, R.A. Handbook of Petroleum Refining Processes; McGraw-Hill: New York, NY, USA, 1997. [Google Scholar]
- Dao, T.P.; Tran, N.Q.; Tran, T.T.; Lam, V.T. Assessing the kinetic model on extraction of essential oil and chemical composition from lemon peels (Citrus aurantifolia) by hydro-distillation process. Mater. Today Proc. 2022, 51, 172–177. [Google Scholar] [CrossRef]
- Sajid, M.; Bai, Y.; Liu, D.; Zhao, X. Organic acid catalyzed production of platform chemical 5-hydroxymethylfurfural from fructose: Process comparison and evaluation based on kinetic modeling. Arab. J. Chem. 2020, 13, 7430–7444. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, H. Chemical kinetic modeling of organic pollutant degradation in Fenton and solar photo-Fenton processes. J. Taiwan Inst. Chem. Eng. 2021, 123, 175–184. [Google Scholar] [CrossRef]
- Hou, L.; Gao, K.; Li, P.; Zhang, X.; Wang, Z.; Song, P.; Yao, W. A kinetic model for calculating total membrane fouling resistance in chemical cleaning process. Chem. Eng. Res. Des. 2017, 128, 59–72. [Google Scholar] [CrossRef]
- Uskov, S.; Potemkin, D.; Kamboj, N.; Snytnikov, P.; Pakharukova, V.; Enikeeva, L.; Gubaydullin, I.; Hussainova, I. Fibrous alumina-based Ni-MOx (M=Mg, Cr, Ce) catalysts for propane pre-reforming. Mater. Lett. 2019, 257, 126741. [Google Scholar] [CrossRef]
- Uskov, S.I.; Potemkin, D.I.; Enikeeva, L.V.; Snytnikov, P.V.; Gubaydullin, I.M.; Sobyanin, V.A. Propane Pre-Reforming into Methane-Rich Gas over Ni Catalyst: Experiment and Kinetics Elucidation via Genetic Algorithm. Energies 2020, 13, 3393. [Google Scholar] [CrossRef]
- Enikeeva, L.; Faskhutdinov, A.; Koledina, K.; Faskhutdinova, R.; Gubaydullin, I. Modeling and optimization of the catalytic isomerization of the pentane-hexane fraction with maximization of individual high-octane components yield. React. Kinet. Mech. Catal. 2021, 133, 879–895. [Google Scholar] [CrossRef]
- Enikeeva, L.; Marchenko, M.; Smirnov, D.; Gubaydullin, I. Parallel Gravitational Search Algorithm in Solving the Inverse Problem of Chemical Kinetics. In Proceedings of the Supercomputing; Voevodin, V., Sobolev, S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 98–109. [Google Scholar] [CrossRef]
- Paulavičius, R.; Žilinskas, J. Simplicial Global Optimization; Springer: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Sergeyev, Y.D.; Kvasov, D.E. Deterministic Global Optimization: An Introduction to the Diagonal Approach; Springer: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Battiti, R.; Brunato, M.; Mascia, F. Reactive Search and Intelligent Optimization; Springer: New York, NY, USA, 2009. [Google Scholar] [CrossRef] [Green Version]
- Eiben, A.; Smith, J. Introduction to Evolutionary Computing; Springer: Berlin, Germany, 2015. [Google Scholar] [CrossRef]
- Kvasov, D.; Mukhametzhanov, M. Metaheuristic vs. deterministic global optimization algorithms: The univariate case. Appl. Math. Comput. 2018, 318, 245–259. [Google Scholar] [CrossRef]
- Sergeyev, Y.; Kvasov, D.; Mukhametzhanov, M. On the efficiency of nature-inspired metaheuristics in expensive global optimization with limited budget. Sci. Rep. 2018, 8, 435. [Google Scholar] [CrossRef] [Green Version]
- Sovrasov, V. Comparison of several stochastic and deterministic derivative-free global optimization algorithms. Lect. Notes Comput. Sci. 2019, 11548, 70–81. [Google Scholar]
- Barkalov, K.; Lebedev, I. Solving multidimensional global optimization problems using graphics accelerators. Commun. Comput. Inf. Sci. 2016, 687, 224–235. [Google Scholar]
- Strongin, R.; Gergel, V.; Barkalov, K.; Sysoyev, A. Generalized Parallel Computational Schemes for Time-Consuming Global Optimization. Lobachevskii J. Math. 2018, 39, 576–586. [Google Scholar] [CrossRef]
- Sysoyev, A.; Barkalov, K.; Sovrasov, V.; Lebedev, I.; Gergel, V. Globalizer—A parallel software system for solving global optimization problems. Lect. Notes Comput. Sci. 2017, 10421, 492–499. [Google Scholar]
- Logan, S. Fundamentals of Chemical Kinetics; Prentice Hall: Hoboken, NJ, USA, 1996. [Google Scholar]
- Kvasov, D.; Sergeyev, Y. Lipschitz global optimization methods in control problems. Autom. Remote. Control. 2013, 74, 1435–1448. [Google Scholar] [CrossRef]
- Kalyulin, S.; Shavrina, E.; Modorskii, V.; Barkalov, K.; Gergel, V. Optimization of Drop Characteristics in a Carrier Cooled Gas Stream Using ANSYS and Globalizer Software Systems on the PNRPU High-Performance Cluster. Commun. Comput. Inf. Sci. 2017, 753, 331–345. [Google Scholar] [CrossRef]
- Strongin, R.G.; Sergeyev, Y.D. Global Optimization with Non-Convex Constraints. Sequential and Parallel Algorithms; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2000. [Google Scholar] [CrossRef]
- Jones, D.; Perttunen, C.; Stuckman, B. Lipschitzian optimization without the Lipschitz constant. J. Optim. Theory Appl. 1993, 79, 157–181. [Google Scholar] [CrossRef]
- Grishagin, V.; Israfilov, R.; Sergeyev, Y. Convergence conditions and numerical comparison of global optimization methods based on dimensionality reduction schemes. Appl. Math. Comput. 2018, 318, 270–280. [Google Scholar] [CrossRef]
- Sergeyev, Y.D.; Strongin, R.G.; Lera, D. Introduction to Global Optimization Exploiting Space-Filling Curves; Springer Briefs in Optimization; Springer: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Molinaro, A.; Pizzuti, C.; Sergeyev, Y. Acceleration tools for diagonal information global optimization algorithms. Comput. Optim. Appl. 2001, 18, 5–26. [Google Scholar] [CrossRef]
- Hooke, R.; Jeeves, T. “Direct Search” Solution of Numerical and Statistical Problems. J. ACM 1961, 8, 212–229. [Google Scholar] [CrossRef]




| Reaction Stages | Reaction Stages |
|---|---|
| (1) n-CH→-CH | (25) n-CH→CH* + H |
| (2) -CH→n-CH | (26) CH* + H→n-CH |
| (3) n-CH→2-MP | (27) 2-MP→MCP+ H |
| (4) 2-MP→n-CH | (28) MCP + H→2-MP |
| (5) n-CH→3-MP | (29) 3-MP→MCP + H |
| (6) 3-MP→n-CH | (30) MCP + H→3-MP |
| (7) 2-MP→3-MP | (31) 2,2-DMB→MCP + H |
| (8) 3-MP→2-MP | (32) MCP + H→2,2-DMB |
| (9) 2-MP→2,2-DMB | (33) 2,3-DMB→MCP + H |
| (10) 2,2-DMB→2-MP | (34) MCP + H→2,3-DMB |
| (11) 2-MP→2,3-DMB | (35) CP + H→n-CH |
| (12) 2,3-DMB→2-MP | (36) n-CH→CP + H |
| (13) 3-MP→2,2-DMB | (37) n-CH→-CH |
| (14) 2,2-DMB→3-MP | (38) -CH→n-CH |
| (15) 3-MP→2,3-DMB | (39) n-CH + H→CH + CH |
| (16) 2,3-DMB→3-MP | (40) n-CH + H→n-CH + CH |
| (17) 2,2-DMB→2,3-DMB | (41) -CH + H→-CH + CH |
| (18) 2,3-DMB→2,2-DMB | (42) n-CH + H→2CH |
| (19) B + 3H→CH* | (43) n-CH + H→n-CH + CH |
| (20) CH*→B + 3H | (44) n-CH + H→n-CH + CH |
| (21) B + 3H→MCP | (45) 2-MP + H→-C4H + CH |
| (22) MCP→B + 3H | (46) 3-MP + H→-CH + CH |
| (23) CH*→MCP | (47) 2,2-DMB + H→-CH + CH |
| (24) MCP→CH* | (48) 2,3-DMB + H→-CH + CH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barkalov, K.; Gubaydullin, I.; Kozinov, E.; Lebedev, I.; Faskhutdinova, R.; Faskhutdinov, A.; Enikeeva, L. On Solving the Problem of Finding Kinetic Parameters of Catalytic Isomerization of the Pentane-Hexane Fraction Using a Parallel Global Search Algorithm. Mathematics 2022, 10, 3665. https://doi.org/10.3390/math10193665
Barkalov K, Gubaydullin I, Kozinov E, Lebedev I, Faskhutdinova R, Faskhutdinov A, Enikeeva L. On Solving the Problem of Finding Kinetic Parameters of Catalytic Isomerization of the Pentane-Hexane Fraction Using a Parallel Global Search Algorithm. Mathematics. 2022; 10(19):3665. https://doi.org/10.3390/math10193665
Chicago/Turabian StyleBarkalov, Konstantin, Irek Gubaydullin, Evgeny Kozinov, Ilya Lebedev, Roza Faskhutdinova, Azamat Faskhutdinov, and Leniza Enikeeva. 2022. "On Solving the Problem of Finding Kinetic Parameters of Catalytic Isomerization of the Pentane-Hexane Fraction Using a Parallel Global Search Algorithm" Mathematics 10, no. 19: 3665. https://doi.org/10.3390/math10193665