

Lie Symmetry Classification and Qualitative Analysis for the Fourth-Order Schrödinger Equation

{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
2.1. Lie Symmetry Vector
2.2. The Concept of a Boundary Layer
3. Symmetry Classification for the Fourth-Order Schrödinger Equation
4. Application
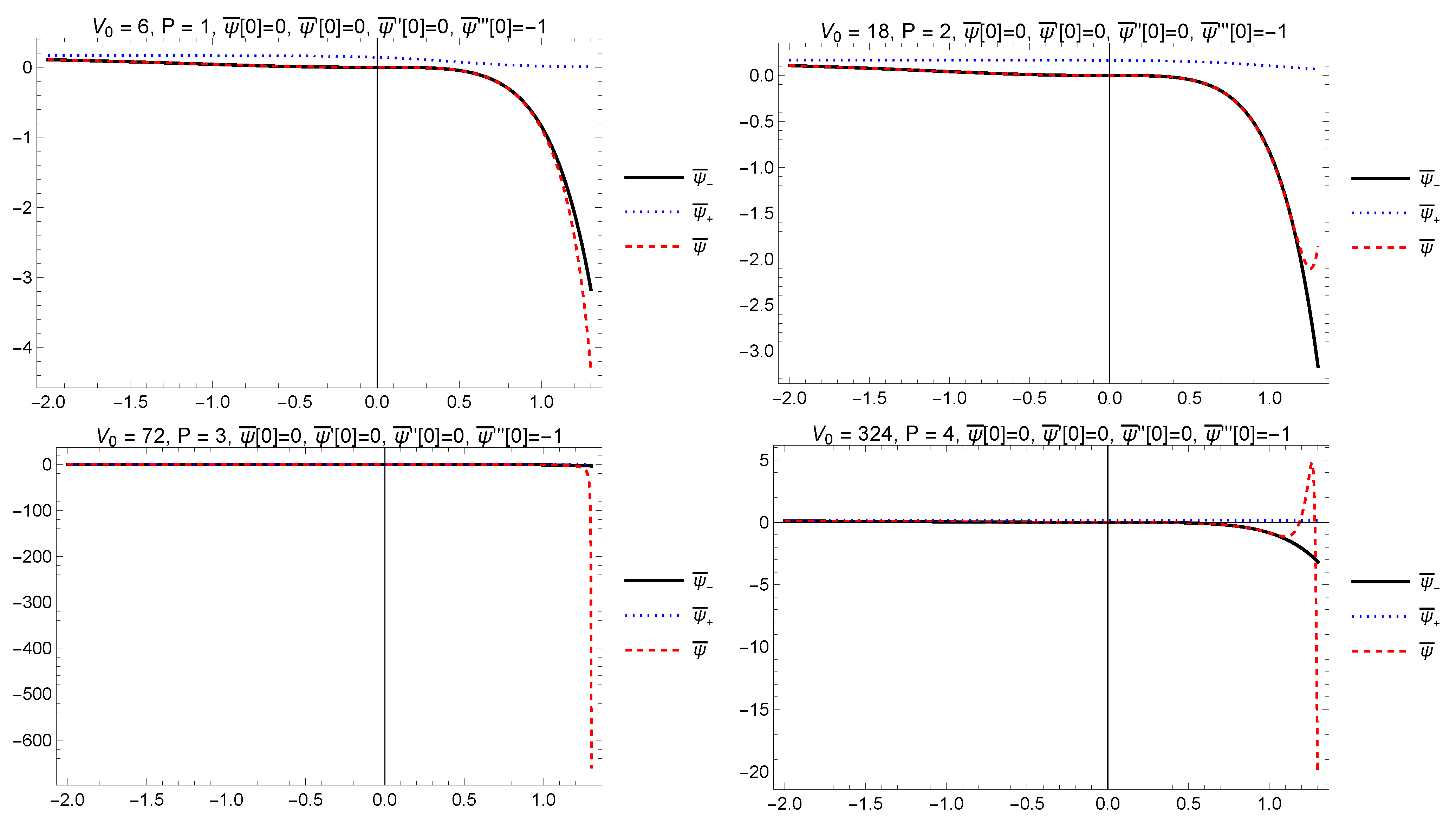
4.1. Power-Law Function
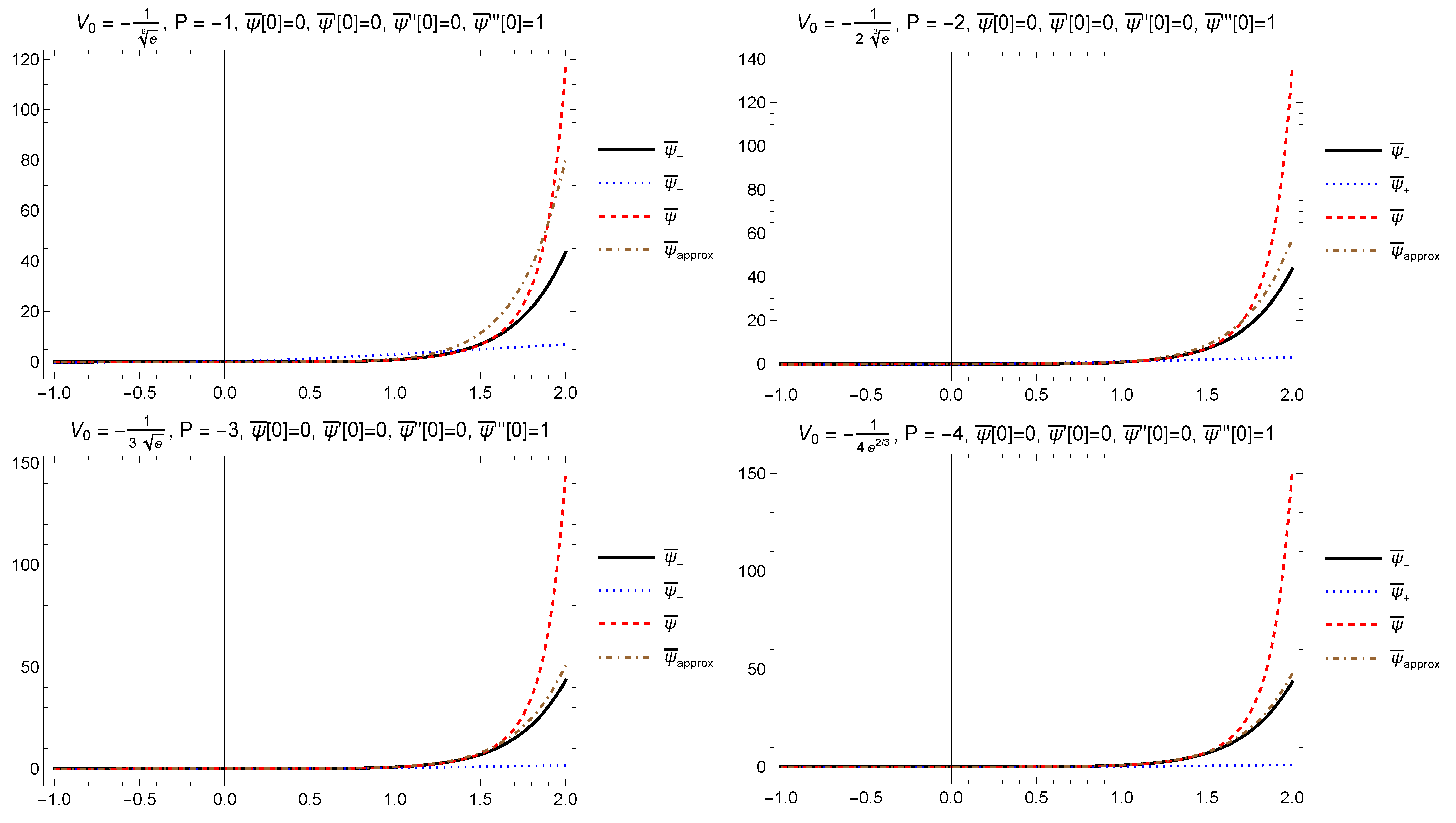
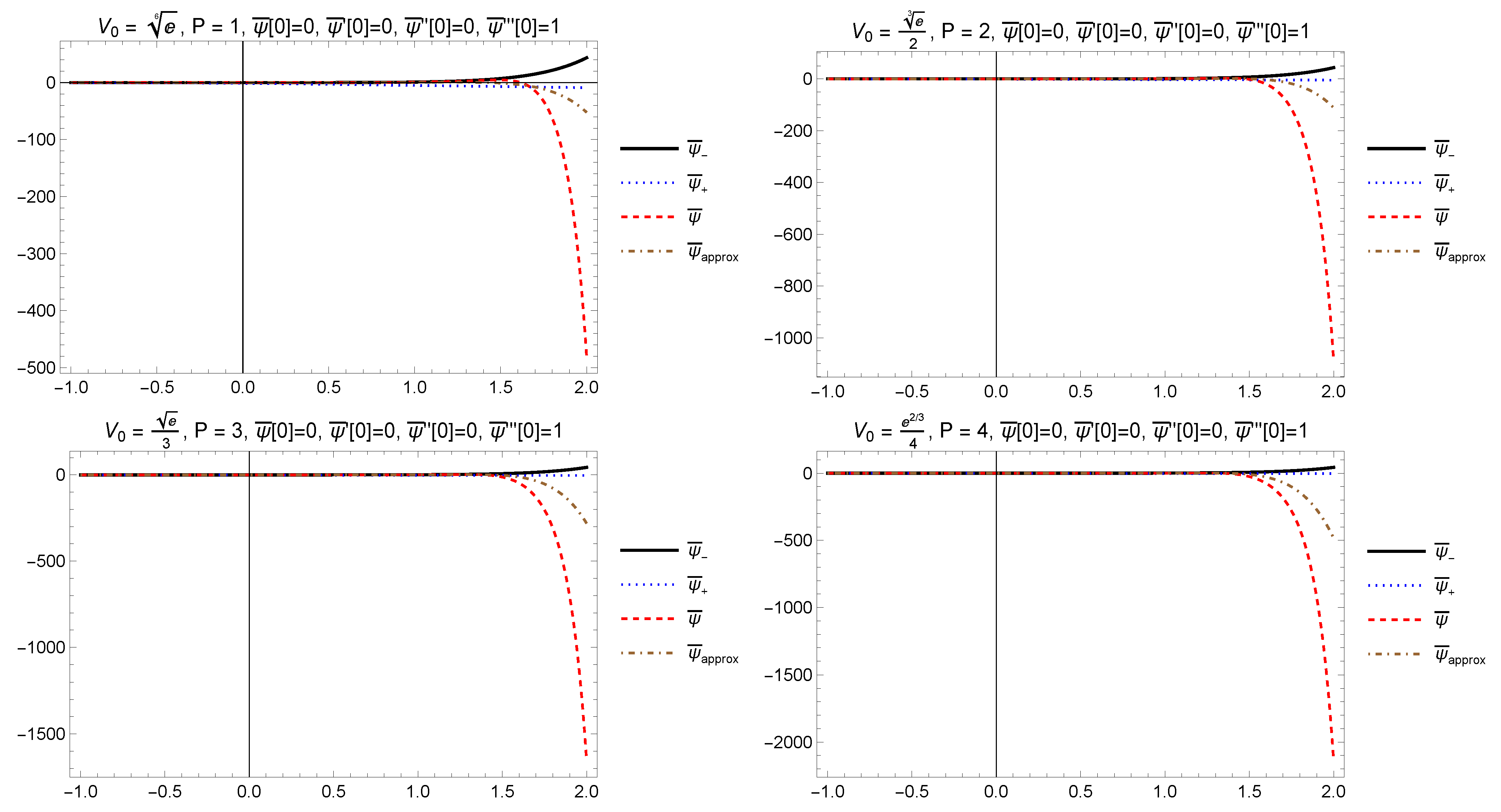
4.2. Exponential Function
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stephani, H. Differential Equations: Their Solutions Using Symmetry; Cambridge University Press: New York, NY, USA, 1989. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetries of Differential Equations; Springer: New York, NY, USA, 1989. [Google Scholar]
- Leach, P.G.L.; Gorringe, V.M. A conserved Laplace-Runge-Lenz-like vector for a class of three-dimensional motions. Phys. Lett. A 1988, 133, 289. [Google Scholar]
- Gazinov, R.K.; Ibragimov, N.H. Lie Symmetry Analysis of Differential Equations in Finance. Nonlinear Dyn. 1998, 17, 387. [Google Scholar]
- Ibragimov, N.H. On the group classification of second order differential equations. (Russ.) Dokl. Akad. Nauk SSSR 1968, 183, 274. [Google Scholar]
- Azad, H.; Mustafa, M.T. Symmetry analysis of wave equation on sphere. J. Math. Anal. Appl. 2007, 333, 1180. [Google Scholar]
- Tsamparlis, M.; Paliathanasis, A. Two-dimensional dynamical systems which admit Lie and Noether symmetries. J. Phys. A Math.Theor. 2011, 44, 175202. [Google Scholar]
- Mahomed, F.M. Symmetry group classification of ordinary differential equations: Survey of some results. Math. Methods Appl. Sci. 2007, 30, 1995. [Google Scholar]
- Jamal, S.; Kara, A.H.; Bokhari, Ȧ.H. Symmetries, conservation laws, reductions, and exact solutions for the Klein–Gordon equation in de Sitter space–times. Can. J. Phys. 2012, 90, 667. [Google Scholar]
- Halder, A.K.; Paliathanasis, A.; Rangasamy, S.; Leach, P.G.L. Similarity solutions for the complex Burgers’ hierarchy. Z. Naturforschung A 2019, 74, 597. [Google Scholar]
- Jamal, S.; Kara, A.H. New higher-order conservation laws of some classes of wave and Gordon-type equations. Nonlinear Dyn. 2012, 67, 97. [Google Scholar]
- Chesnokov, A.A. Symmetries and exact solutions of the rotating shallow-water equations. J. Appl. Mech. Techn. Phys. 2008, 49, 737. [Google Scholar]
- Jamal, S. Solutions of quasi-geostrophic turbulence in multi-layered configurations. Quaest. Math. 2018, 41, 409. [Google Scholar]
- Halder, A.K.; Paliathanasis, A.; Leach, P.G.L. Noether’s Theorem and Symmetry. Symmetry 2018, 10, 744. [Google Scholar]
- Schwarz, F. Solving second order ordinary differential equations with maximal symmetry group. Computing 1999, 62, 1. [Google Scholar]
- Reid, G.J.; Wittkopf, A.D. Determination of maximal symmetry groups of classes of differential equations. In ISSAC ’00: Proceedings of the 2000 International Symposium on Symbolic and Algebraic Computation; Association for Computing Machinery: New York, NY, USA, 2000; pp. 272–280. [Google Scholar]
- Ali, S.; Safdar, M.; Qadir, A. Linearization from complex Lie point transformations. J. Appl. Math. 2014, 2014, 793247. [Google Scholar]
- Karpman, V.I. Lyapunov approach to the soliton stability in highly dispersive systems. I. Fourth order nonlinear Schrödinger equations. Phys. Lett. A 1996, 215, 254. [Google Scholar]
- Karpman, V.I.; Shagalov, A.G. Stability of solitons described by nonlinear Schrödinger-type equations with higher-order dispersion. Phys. D 2000, 144, 194. [Google Scholar]
- Segata, J. Factorization technique for the fourth-order nonlinear Schrödinger equation. Math. Methods Appl. Sci. 2006, 26, 1785. [Google Scholar]
- Pausader, B. The cubic fourth-order Schrödinger equation. J. Funct. Anal. 2009, 256, 2473. [Google Scholar]
- Pausader, B.; Shao, S. The mass-critical fourth-order Schrödinger equation in high dimensions. J. Hyperbolic Differ. 2010, 7, 651. [Google Scholar]
- Baquet, C.; Villamizar-Roa, E.J. On the management fourth-order Schrodinger-Hartree equation. Evol. Equ. Control 2020, 9, 865. [Google Scholar]
- Liu, X.; Zhang, T. The Cauchy problem for the fourth-order Schrödinger equation in Hs. J. Math. Phys. 2021, 62, 071501. [Google Scholar]
- Erdogan, B.; Green, W.R.; Torpak, E. On the fourth order Schrödinger equation in three dimensions: Dispersive estimates and zero energy resonances. J. Differ. Equ. 2021, 271, 152. [Google Scholar]
- Fibich, G.; Ilan, B.; Papanicolaou, G. Self-focusing with fourth-order dispersion. SIAM J. Appl. Math. 2002, 62, 1437. [Google Scholar]
- Fibich, G.; Ilan, B.; Schochet, S. Critical exponents and collapse of nonlinear Schrödinger equations with anisotropic fourth-order dispersion. Nonlinearity 2003, 16, 1809. [Google Scholar]
- Karpman, V.I. Envelope solitons in gyrotropic media. Phys. Rev. Lett. 1995, 74, 2455. [Google Scholar]
- Quarshi, M.M.A.; Yusuf, A.; Aliyu, A.I.; Inc, M. Optical and other solitons for the fourth-order dispersive nonlinear Schrödinger equation with dual-power law nonlinearity. Superlattices Microstruct. 2017, 105, 183. [Google Scholar]
- Fedele, R.; Schamel, H.; Shukla, P.K. Solitons in the Madelung’s Fluid. Phys. Scr. 2002, 2002, 18. [Google Scholar]
- Natali, F.; Pastor, A. The Fourth-Order Dispersive Nonlinear Schrödinger Equation: Orbital Stability of a Standing Wave. SIAM J. Appl. Dyn. Syst. 2015, 14, 1326–1347. [Google Scholar] [CrossRef]
- Hayaski, N.; Naumkin, P.I. On the inhomogeneous fourth-order nonlinear Schrödinger equation. J. Math. Phys. 2015, 56, 093502. [Google Scholar]
- Konishi, K.; Paffuti, G.; Provero, P. Minimum physical length and the generalized uncertainty principle in string theory. Phys. Lett. B 1990, 234, 276. [Google Scholar]
- Camelia, A. Relativity in spacetimes with short-distance structure governed by an observer-independent (Planckian) length scale. Int.J. Mod. Phys. D 2002, 11, 35. [Google Scholar]
- Martinetti, P.; Mercati, F.; Tomassini, L. Minimal length in quantum space and integrations of the line element in noncommutative geometry. Rev. Math. Phys. 2012, 24, 1250010. [Google Scholar]
- Ashtekar, A.; Lewandowski, J. Background independent quantum gravity: A status report. Class. Quantum Grav. 2004, 21, R53. [Google Scholar]
- Maggiore, M. A generalized uncertainty principle in quantum gravity. Phys. Lett. B 1993, 304, 65. [Google Scholar]
- Hossenfelder, S. Minimal length scale scenarios for quantum gravity. Living Rev. Relativ. 2013, 16, 2. [Google Scholar]
- Das, S.; Vagenas, E.C. Universality of quantum gravity corrections. Phys. Rev. Lett. 2008, 101, 221301. [Google Scholar]
- Moayedi, S.K.; Setare, M.R.; Moayeri, H. Quantum gravitational corrections to the real klein-gordon field in the presence of a minimal length. Int. J. Theor. Phys. 2010, 49, 2080. [Google Scholar]
- Hamil, B.; Merad, M.; Birkandan, T. Applications of the extended uncertainty principle in AdS and dS spaces. Eur Phys. J. Plus 2019, 134, 278. [Google Scholar]
- Dabrowski, M.P.; Wagner, F. Asymptotic generalized extended uncertainty principle. EPJC 2020, 80, 676. [Google Scholar]
- Nenmeli, V.; Shankaranarayanan, S.; Todorinov, V.; Das, S. Maximal momentum GUP leads to quadratic gravity. Phys. Lett. B 2021, 821, 136621. [Google Scholar]
- Das, A.; Das, S.; Vagenas, E.C. Discreteness of space from GUP in strong gravitational fields. Phys. Lett. B 2020, 809, 135772. [Google Scholar]
- Aghababaei, S.; Mordpour, H.; Vagenas, E.C. Hubble tension bounds the GUP and EUP parameters. Eur. Phys. J. Plus 2021, 136, 997. [Google Scholar]
- Ovsiannikov, L.V. Group Analysis of Differential Equations; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Zhang, Z.-Y.; Li, G.-F. Lie symmetry analysis and exact solutions of the time-fractional biological population model. Phys. A 2020, 540, 123134. [Google Scholar]
- Jamal, S.; Kara, A.H.; Narain, R. Wave equations in Bianchi Space-times. J. App. Math. 2012, 2012, 765361. [Google Scholar]
- Lahno, V.; Zhdanov, R.; Magda, O. Group classification and exact solutions of nonlinear wave equations. Acta Appl. Math. 2006, 91, 253. [Google Scholar]
- Baikov, V.A.; Gladkov, A.V.; Wiltshire, R.J. Lie symmetry classification analysis for nonlinear coupled diffusion. J. Phys. A Math. Gen. 1998, 31, 7483. [Google Scholar]
- Huang, D.; Ivanova, N.M. Group analysis and exact solutions of a class of variable coefficient nonlinear telegraph equations. J. Math. Phys. 2007, 48, 073507. [Google Scholar]
- Cherniha, R.; Serov, M.; Prystavka, Y. A complete Lie symmetry classification of a class of (1+2)-dimensional reaction-diffusion-convection equations. Commun. Nonlinear Sci. Numer. Simul. 2021, 92, 105466. [Google Scholar]
- Verhulst, F. Methods and Applications of Singular Perturbations: Boundary Layers and Multiple Timescale Dynamics, Texts in Applied Mathematics; Springer: New York, NY, USA, 2005. [Google Scholar] [CrossRef]
- Paliathanasis, A.; Tsamparlis, M. Lie and Noether point symmetries of a class of quasilinear systems of second-order differential equations. J. Geom. Phys. 2016, 107, 45. [Google Scholar]
- Karpathopoulos, L.; Paliathanasis, A.; Tsamparlis, M. Lie and Noether point symmetries for a class of nonautonomous dynamical systems. J. Math. Phys. 2017, 58, 082301. [Google Scholar]
- Paliathanasis, A.; Tsamparlis, M. The geometric origin of Lie point symmetries of the Schrödinger and the Klein–Gordon equations. Int. J. Geom. Meth. Mod. Phys. 2014, 11, 1450037. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paliathanasis, A.; Leon, G.; Leach, P.G.L. Lie Symmetry Classification and Qualitative Analysis for the Fourth-Order Schrödinger Equation. Mathematics 2022, 10, 3204. https://doi.org/10.3390/math10173204
Paliathanasis A, Leon G, Leach PGL. Lie Symmetry Classification and Qualitative Analysis for the Fourth-Order Schrödinger Equation. Mathematics. 2022; 10(17):3204. https://doi.org/10.3390/math10173204
Chicago/Turabian StylePaliathanasis, Andronikos, Genly Leon, and Peter G. L. Leach. 2022. "Lie Symmetry Classification and Qualitative Analysis for the Fourth-Order Schrödinger Equation" Mathematics 10, no. 17: 3204. https://doi.org/10.3390/math10173204