1. Introduction
Wind energy generation has been growing at an unprecedented rate. For instance, the increase in wind energy capacity from 18 GW in 2000 to 590 GW in 2019 is solid evidence of the amazing growth in wind energy production [
1,
2]. Many countries have decided to produce energy through wind power because it is both clean and economical. According to the latest annual report from the World Wind Energy Association (WWEA), China is the largest wind energy harvester in the world with a capacity of 217 GW, following the USA with 96 GW, and Germany and India in third and fourth places with 59 GW and 39 GW, respectively [
1].
A typical horizontal axis wind turbine has four main operational regions according to the incoming wind flow [
3,
4,
5,
6] (
Figure 1). The wind turbine operates in region I if the wind velocity is lower than the cut-in wind velocity. Because of the low wind speed, a wind turbine that operates in the region I does not produce any energy. If the wind speed is between the cut-in wind velocity and the rated speed, then the wind turbine operates in region II and extracts as much energy from the wind as possible. Actuator control for this purpose is the generator. With the increase of wind speed from the rated wind velocity to the cut-out wind velocity, the wind turbine operates in region III with limited power output to its nominal value for the safety of machinery. Actuator control is the pitch angle mechanism for regulating the output power. Finally, in region IV, the wind turbine ceases to generate power to prevent any damage to the machinery due to the larger wind velocity than the cut-out wind velocity [
3].
There has been plenty of research studying the control problem in regions II and III. For region II, the maximum power point tracking algorithm (MPPT) has been extensively investigated and is the simplest method for achieving maximum power [
5,
6,
7]. Its main problem, however, is that it has weak performance against the uncertainties in the model [
7,
8,
9,
10]. The gain schedule PI (GPI) control algorithm was first developed in [
11] to limit the output power in region III. The gains of the algorithm were regulated by using pitch sensitivity, but its main obstacle was measurement noise due to the wind speed.
Control algorithms for bodies such as wind turbines can be categorizable, in literature, into model-based and non-model-based approaches [
12,
13,
14,
15,
16]. Non-model-based approaches include fuzzy control systems [
17,
18] and PI or GPI control approaches [
11]. The main part of each fuzzy system is the fuzzy rule base [
19]. Designing the fuzzy rule base, most of the time is based on a trial-and-error process which makes it difficult to use. The model-based approaches are widely found in the literature [
20,
21,
22,
23,
24]. Model-based predictive control (MPC), is widely used in many engineering applications [
25,
26,
27]. MPC is a predictive approach based on the optimization of a cost function. The cost function must be defined to address the output power error and some sources of vibration loads. However, the main disadvantage of this approach is its inability to provide any analytical stability proof for the closed-loop system [
25]. Most of the model-based approaches are based on non-linear control theory like sliding mode, adaptive control approach, and backstepping [
22,
23,
28,
29]. In these works, two simple models: one-mass and two-mass were considered for the whole wind turbine system. However, these models have not considered the aeroelastic behaviour of the blades and the tower. In addition, the control signal in these works contains unmeasurable (like the aerodynamic torque) and unknown state variables.
The above discussion demonstrates that in order to have a better understanding of the wind turbine loads, an aeroelastic model is necessary. Wind turbines are complex structures. The blades are like rotating beams that can vibrate in two directions that are perpendicular to each other [
30]. The lateral vibration in the rotational plane is called edgewise and the lateral vibration perpendicular to the rotational plane is called flapwise vibration. The tower also cannot be considered a rigid body. Similar to the blades, the tower can vibrate in the rotational plane (i.e., “side-side” vibration), and also perpendicular to the rotational plane (i.e., “fore-aft” vibration) [
30,
31,
32]. The mitigation of the vibration loads is a significant goal in increasing the life span of a wind turbine. Three main approaches, namely, passive, semi-active, and active have been proposed in the literature to reduce the vibration loads of the structure [
33]. In particular, passive control has been widely studied. In [
31], roller dampers were proposed to reduce the edgewise vibrations in the blades, in which, each blade of the wind turbine is considered as a two degree of freedom system and the roller damper is designed to minimize the edgewise vibration signal. In another research [
34], tuned liquid dampers were used to mitigate vibrations in the edgewise direction. In [
35], a 3D pendulum was suggested to reduce both fore-aft and side-side vibration of the tower. The results demonstrated that, with a 2% mass ratio (ratio between the mass of the pendulum with respect to the rotor), the pendulum can reduce the standard deviation (STD) of the vibration signals by around 10% in comparison to dual tuned mass dampers (TMDs). However, the main point of these studies is that the performance of the vibration absorber was designed by considering the constant rotor speed (12.1 rpm). In addition, the coupling dynamics between the drivetrain and the other parts were not investigated.
According to the above discussion, the following shortcomings in the literature body are addressed:
To address these issues, our research considers both control and load mitigation of the NREL 5MW wind turbine. A complete aeroelastic model of this wind turbine is investigated. This model considers the continuous vibration of the blades in the edgewise and flapwise directions, the vibration of the tower in the fore-aft and side-side directions, and the flexibility of the drivetrain system. The interaction of the wind with the blades is obtained by the blade element momentum theory (BEM), Prandtl correction, dynamic stall, and wake modelling. This model is validated by the FAST numerical tool of NREL. The main contribution of this research is summarized as follows:
The control problem in region II has been considered by a novel super twisting control approach. The main novelty and contribution of this part, in comparison to the literature body, is estimating the unknown terms by designing a novel nonlinear observer. The comparison of our results with the conventional ISC algorithm demonstrates that this approach can increase the mean value of the power coefficient by nearly 1%.
In region III, we developed a novel sensorless pitch controller based on the previous research of the first author [
37]. Similar to the previous part, we estimate the unknown terms (especially the aerodynamic torque derivatives) by a super twisting sliding mode observer. In order to fully design a sensorless approach, we estimate the pitch sensitivity by a novel ANFIS (adaptive neural fuzzy system) system. The inputs of this system are the effective wind velocity, pitch angle, and rotor speed. The simulation results are compared with conventional GPI which demonstrates that the standard deviation of pitch angle, tower fore-aft vibration, and flapwise displacement of the blade is decreased significantly.
Finally, unlike the previous literature, the passive vibration design is considered with the coupling effect of the drivetrain dynamic, the tower, and the blade. In the previous works, the drivetrain dynamic is ignored in the optimization process and the rotor speed is considered constant at the nominal value (12.1 rpm).
The remainder of this paper is organized as follows: The aeroelastic wind turbine modelling is investigated in
Section 2. The model validation is considered in
Section 3. The novel sliding mode control based on the sliding mode observer is studied in
Section 4.
Section 5 follows the TMD design procedure and compares the load mitigation with the fully coupled model and uncoupled model (without drivetrain dynamic). The simulation results are investigated in
Section 6. Finally,
Section 7 concludes this study and gives the future direction.
3. Validation of the Model by FAST
In this section, to ensure the compatibility of the obtained model, the results are compared to the numerical FAST aeroelastic code. FAST is an aeroelastic code which is developed by the national renewable energy lab in the USA [
48,
49]. The edgewise and flapwise displacement, as well as the nacelle vibrations, are compared with the FAST code. For extracting the wind field, the Turbsim code is used [
50]. The results are obtained in the same mean wind speed and the same turbulence intensity situation in FAST and the proposed model in this research. Unlike the previous research [
37], in which the uniform flow is simulated for simulation, the validation part in this research is presented by considering a fully 3D wind profile by considering the wind shear effect. The power control approaches in regions II and III are assumed as the baseline approaches which have been considered in [
11]. The dynamic response of the proposed model is compared with FAST for two load cases. Load case I, has a mean wind velocity of 7 m/s and turbulence intensity of 10%(region II), whereas load case II has a mean wind speed of 20 m/s and turbulence intensity of 10% (region III) (
Table 1 and
Table 2).
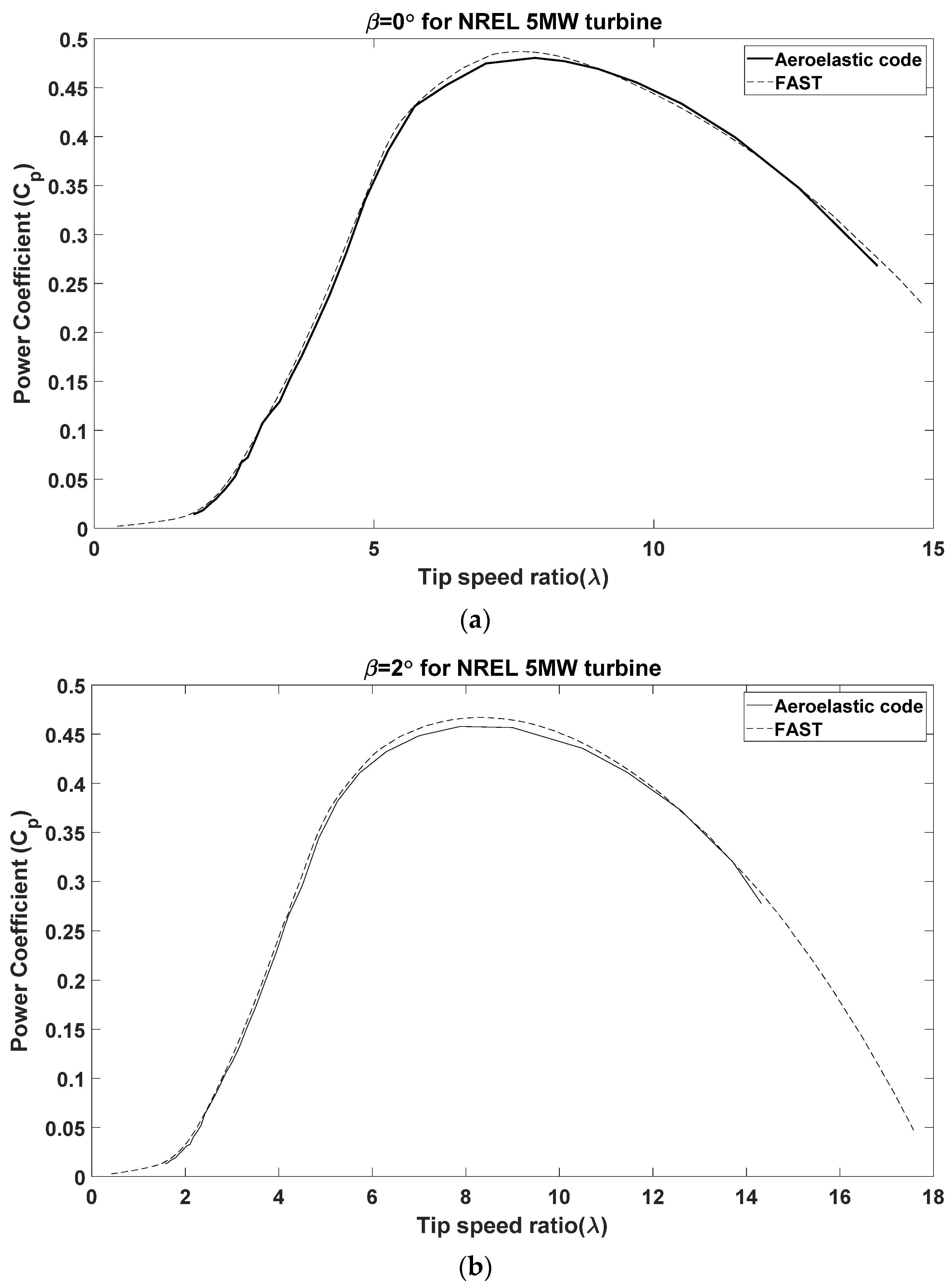
The power coefficient of the wind turbine is one of the most important characteristics that determine the ratio of mechanical convertible power to the kinetic energy of the wind. The power coefficient depends on the tip speed ratio (ratio between the tip velocity of the blade with respect to the hub height wind velocity) and the pitch angle. The tip speed ratio is defined as follows:
where
V is the effective wind velocity and
R is the length of the blade. The power coefficient can be modelled as follows:
where
is the aerodynamic power (
),
is the air density, and
is the power coefficient.
In
Figure 8, the power coefficient is given as a function of tip speed ratio at different pitch angles (in degrees), and the results are compared with the FAST code. As can be seen, the results are compatible with the FAST simulations.
Remark 5. The source FAST code is compiled with the SIMULINK/MATLAB and it is possible to validate the performance of the control algorithm on the open loop model of the wind turbine and there is a module for designing the tuned mass damper. However, as far as we know, there is no place to both consider the effect of vibration absorbers and control algorithms on the power generation and dynamic loads. In addition, the aeroelastic code will be investigated in our future work for designing various types of vibration absorbers, besides tuned mass dampers.
5. Load Mitigation of the Tower Vibration Loads by Using TMD
In this section, the load mitigation of the tower of the NREL 5MW has been considered by using a vibration absorber. According to [
32,
34], load mitigation was considered at a constant rotor speed and ignoring the drivetrain system of a wind turbine. According to [
58], the standard deviation of the pitch angle can significantly affect the vibration loads of the tower. The wind turbine’s tower can be modelled as a beam that is fixed at the bottom with a concentrated mass (the nacelle) attached to the free end. This structure has two main sources of excitation:
The vibration loads are transmitted from the blades to the hub and finally to the tower. These vibration loads can be influenced by the drivetrain control algorithms in the previous section.
Aerodynamic loads from the wind.
According to [
58], the aerodynamic loads of the tower are negligible in comparison to the first source of excitation; in other words, designing the vibration absorbers without considering the control algorithms would result in inaccuracies. To consider the effect of coupling between the drivetrain dynamic and the turbine on the load analysis, in
Figure 14, the change between STD of nacelle fore-aft displacement and the two cases are considered in region III. The first case is the fully coupled model which is described in this research and is validated by FAST. The second case is the uncoupled model with constant rotor speed (12.1 rpm) and without considering the effect of the drivetrain and the pitch actuator. For this purpose, we defined the following parameter:
where
is the STD of the parameter (nacelle fore-aft displacement and flapwise displacement of the blade) in the coupled model,
is the STD of the parameter in the uncoupled model, and
denotes the difference between the coupled and uncoupled model. As can be seen, the difference is significant and any load analysis and load mitigation perspective must consider the coupled model.
In this section, by considering the control algorithm in the previous section, a TMD system is designed to reduce the fore-aft vibration of the tower. In order to design the absorber, another DOF must be considered in the aeroelastic model.
Also, the kinetic energy, potential energy, and external work related to the damper of the absorber system can be calculated as [
30]:
where
,
and
are the mass, stiffness, and damping coefficient of the TMD in the fore-aft direction and
,
, and
are the kinetic energy, potential energy, and the virtual work of the damper respectively. The main goal is to design the parameters
to minimize the fore-aft vibration signal.
Remark 8. In Section 2 and Section 3, we defined an 11 DOFs model. In this section, other DOFs (related to the TMD) must be considered. In other words, the new size of the matrices M and N in Equation (38) are 11 × 11 and the size of vector K is 11 × 1.
6. Simulation Results
In this section, a complete aeroelastic simulation has been done by considering the control signal and the tuned mass damper in the nacelle of the wind turbine. These simulations considered 12 DOFs (6 DOFs for the blade, 2DOFs for the tower, 2DOFs for the drivetrain, 1 DOF for the pitch actuator, and 1 DOF for the absorber) of the wind turbine dynamic system. The simulation was run on MATLAB to investigate two load cases in region II and region III. The load case in region II was with a mean wind speed of 8 m/s and turbulence intensity of 10%, and the other load case in region III was with a mean wind speed of 20 m/s and turbulence intensity of 10%. The performance of the designed controllers in both regions was compared with conventional controllers (ISC control algorithm in region II and the GPI controller in region III) in terms of load mitigation. The following assumptions have been considered in the aeroelastic simulations:
The optimum rotor speed in region II is smoothed by a low pass filter with a time constant = 1 s.
The simulation time is considered as 10 min (according to the IEC standard [
33]).
In order to prevent chattering in the super twisting sliding mode approach, the rejection term is smoothed by a low pass filter with a time constant of 1 s.
In
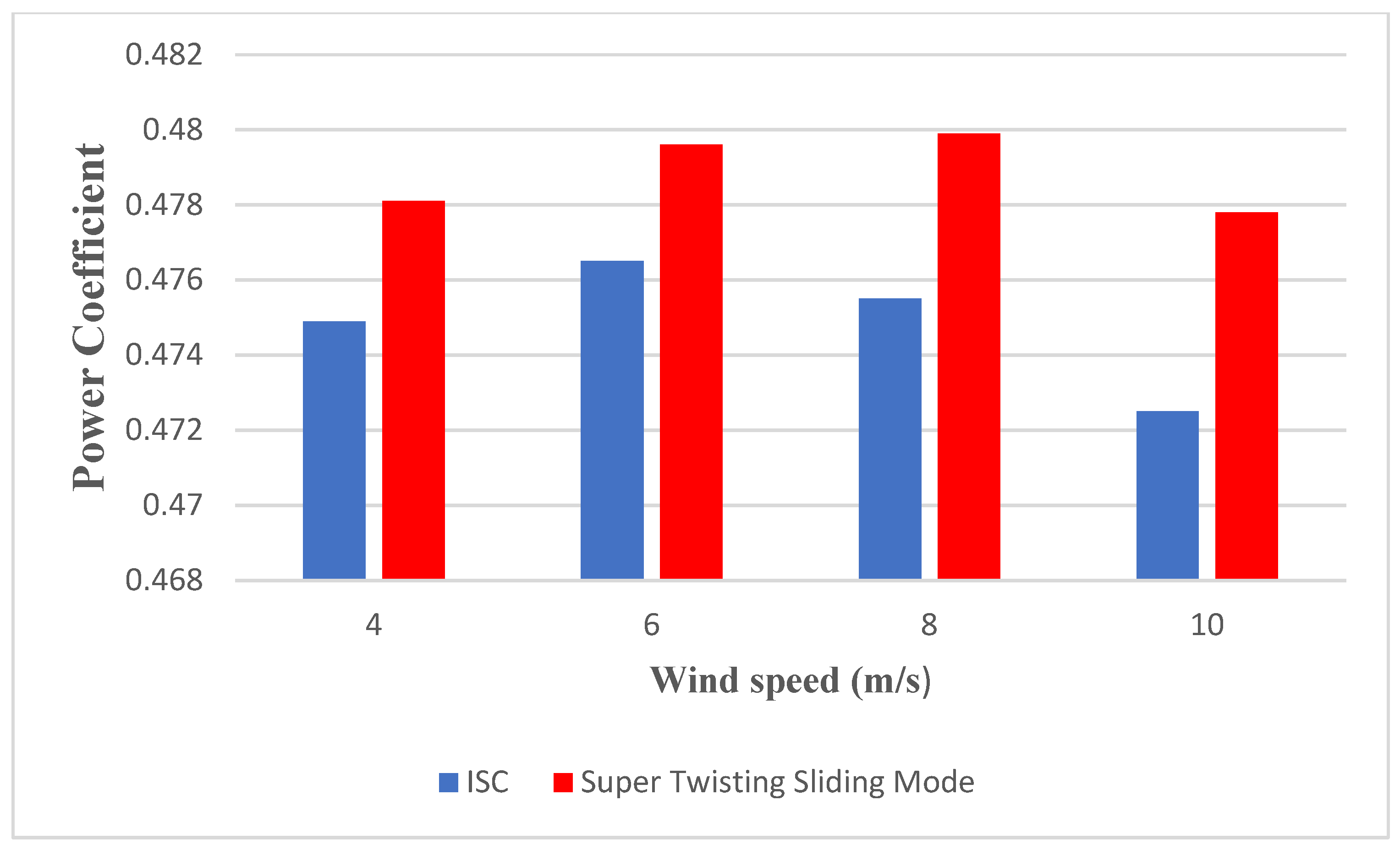
Figure 15, the performance of the super twisting control approach was compared with the ISC algorithm in absorbing wind energy, and also the vibration loads in region II. As
Figure 15 shows, super twisting sliding mode control had a better performance in increasing power coefficient in region II. However, the performance of both approaches is very similar in the terms of vibration loads. More details of the simulation can be found in
Table 3.
In
Figure 16, the performance of these control approaches is compared in absorbing energy from the wind. As can be seen, the super twisting control approach can improve the absorbed energy in comparison to the conventional ISC algorithm by nearly 1%.
Remark 9. As sketched in Figure 15, the generated power of our novel approach in some regions is higher than the conventional MPPT method and in other regions, the MPPT approach generates more power. In order to have a justifiable comparison, in Figure 16 we compare the average value of the power coefficient. The averaged power coefficient has been calculated as follows:where is the power coefficient as a function of time, T is the simulation time, which is 10 min in our work. In
Figure 17, the performance of the designed control system is compared with the GPI control system in region III. In
Table 4, a complete comparison is investigated. As can be seen, the super twisting control approach has a very good ability to reduce the vibration loads of the blade in the flapwise and edgewise directions. In addition, according to
Table 4, the super twisting approach has a better ability in tracking the nominal power and reducing vibration loads.
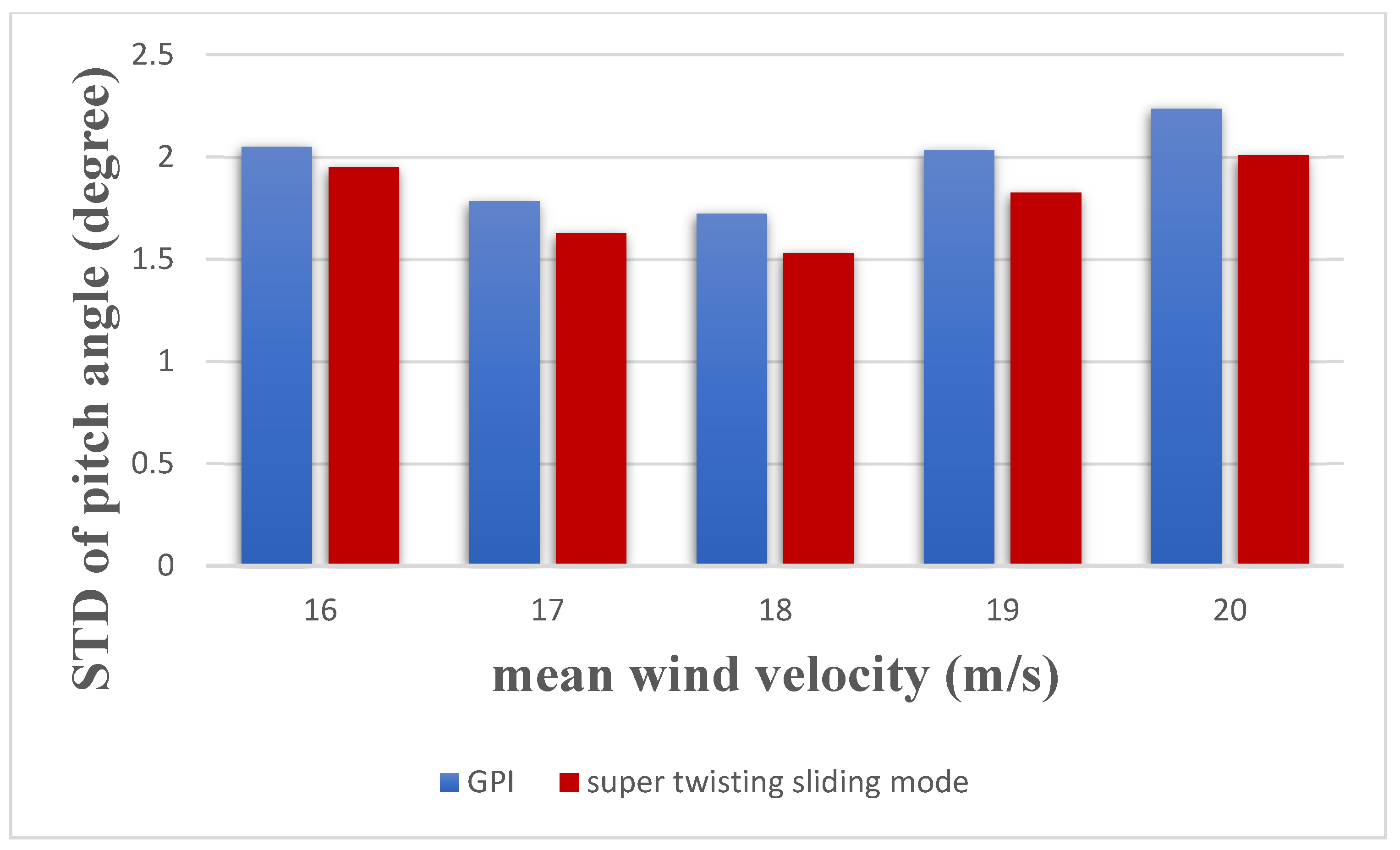
In order to consider the performance of the super twisting sliding mode control, in
Figure 18, the STD of pitch angle has been investigated. As can be seen, the proposed method can reduce the STD of pitch angle by approximately 12%. In
Figure 19, the reduction in the mean value of flapwise vibration has been considered. As can be seen, the super twisting sliding mode can reduce the flapwise mean value by 7% to 12% in different mean wind velocities.
For designing the TMD in the nacelle, the genetic algorithm was used for optimization with the root mean square (RMS) of the fore-aft vibration of the tower as the fitness function. For this purpose, the MATLAB optimization toolbox was used. One should note that the mass of the damper must not exceed 4% of the total mass of the rotor and nacelle [
32]. Also, the stroke of the TMD in the nacelle is 8 m (because the length of the nacelle is 18 m. The best and mean individuals of the optimization process have been depicted in
Figure 20. As is observed, the algorithm converges after 14 generations. The optimal results are:
The TMD strokes and fore-aft vibration signals are shown in
Figure 21. The load reduction of the fore-aft vibration of the tower is given in
Table 5 at different mean wind speeds with a constant turbulence intensity of 10%. The fore-aft vibration reduction of the tower at different turbulence intensities with a constant mean wind speed of 20 m/s has been investigated as seen in
Table 6. The load reduction is defined as follows:
where
is the reduction rate,
is the STD of the tower fore-aft vibration without the TMD, and
is the STD of the vibration signal by considering the TMD effect.
Remark 10. The main novelty of the TMD design procedure is considering the coupled dynamics of the wind turbine. Although it must be noted that the coupled model is completely available in the FAST and other similar aeroelastic codes. However, the accuracy of the constant speed model is the main concern of this part. As demonstrated in Figure 14, the coupled dynamics of the turbine and the drivetrain makes much better accuracy in the estimation of the dynamic loads. For doing this, we compare the standard deviation of the coupled model and the uncoupled model in comparison to the blades and the tower vibration. The difference between the coupled and uncoupled models in the estimation of the dynamic loads has been discussed in Figure 14. 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




























