
Regional Location Routing Problem for Waste Collection Using Hybrid Genetic Algorithm-Simulated Annealing

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
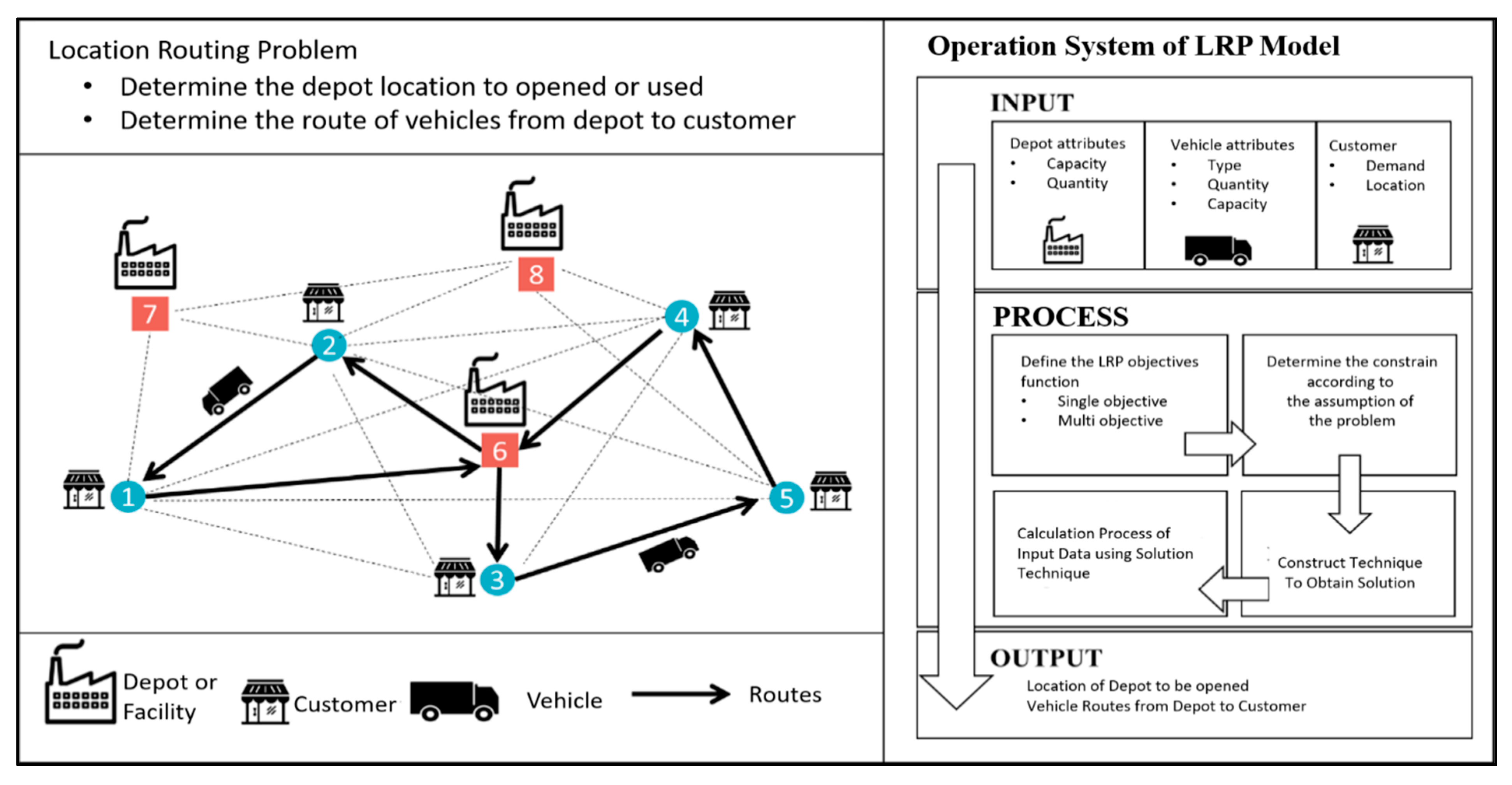
- We present a new location routing problem to solve the waste collection problem and provide some scenarios.
- We develop a hybrid genetic algorithm and simulated annealing (GASA) that can efficiently solve the model for each scenario.
- We implement the proposed methods into a real example adopted from PD Kebersihan in Bandung City to provide a more realistic illustration of this waste collection problem
2. Literature Review
3. Location Routing Model and Scenario Approach
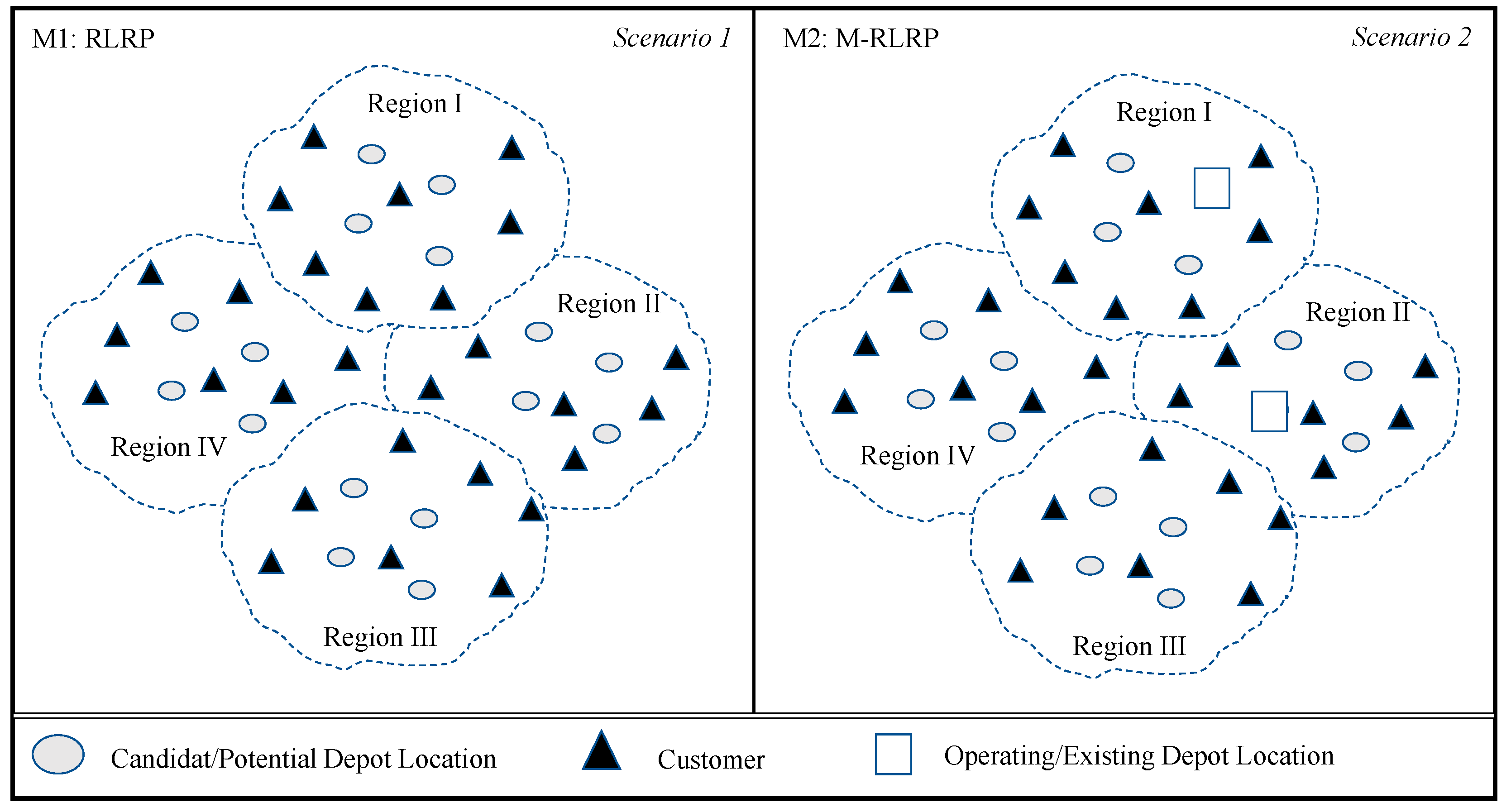
3.1. Regional Location Routing Problem
3.2. Multi-Depot Regional Location Routing Problem
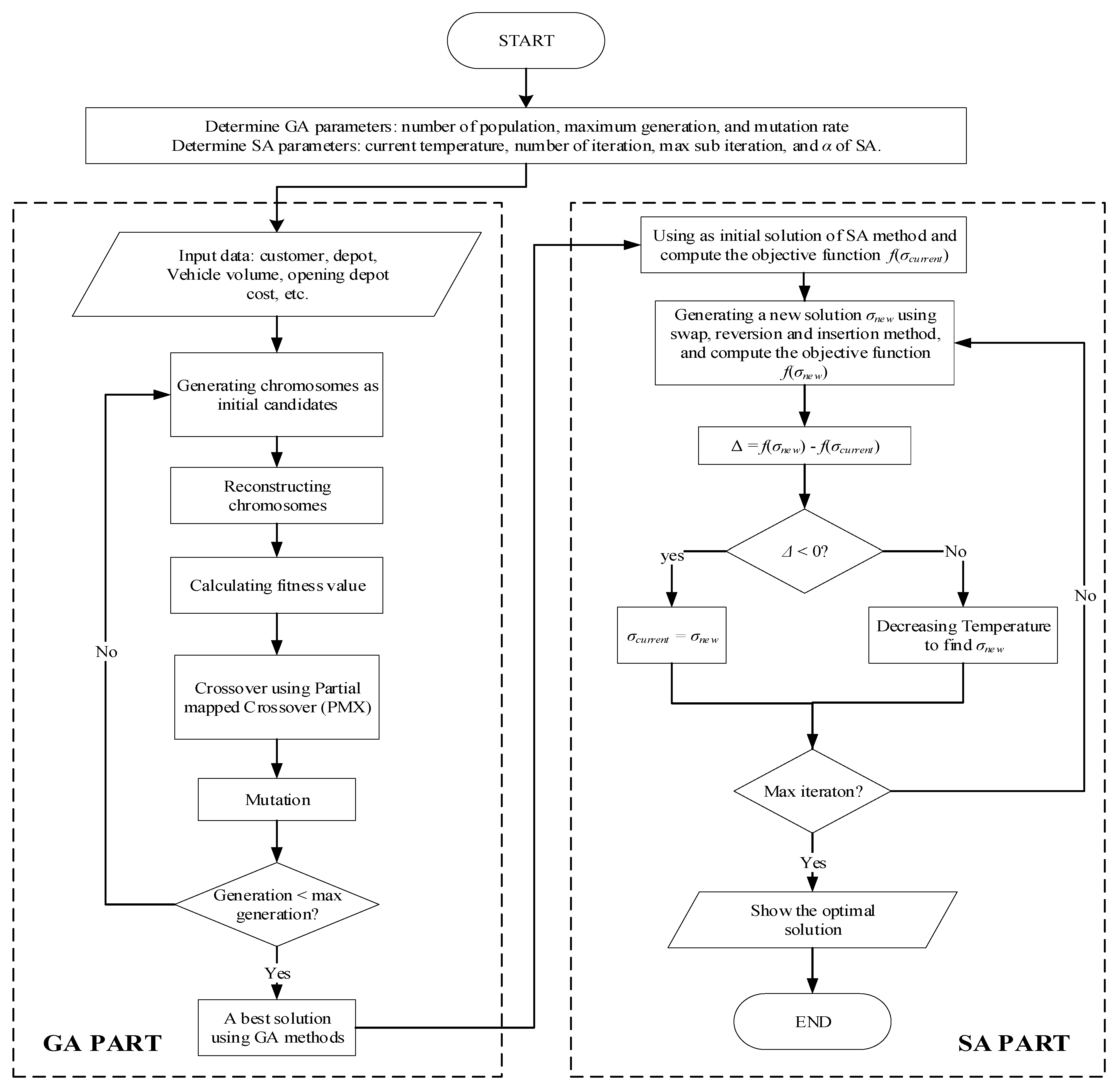
4. Solution Method
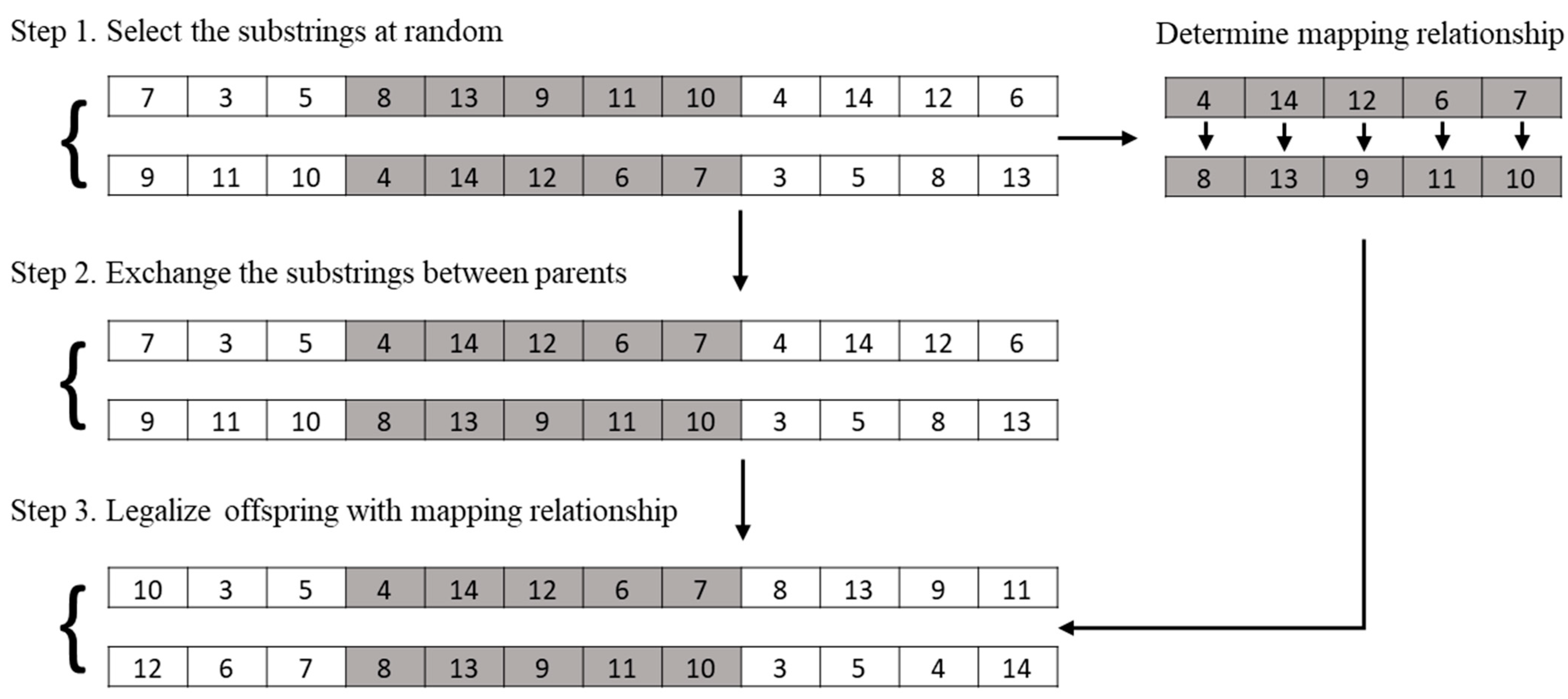
4.1. Genetic Algorithm
4.2. Simulated Annealing
5. Experimental Results and Discussion
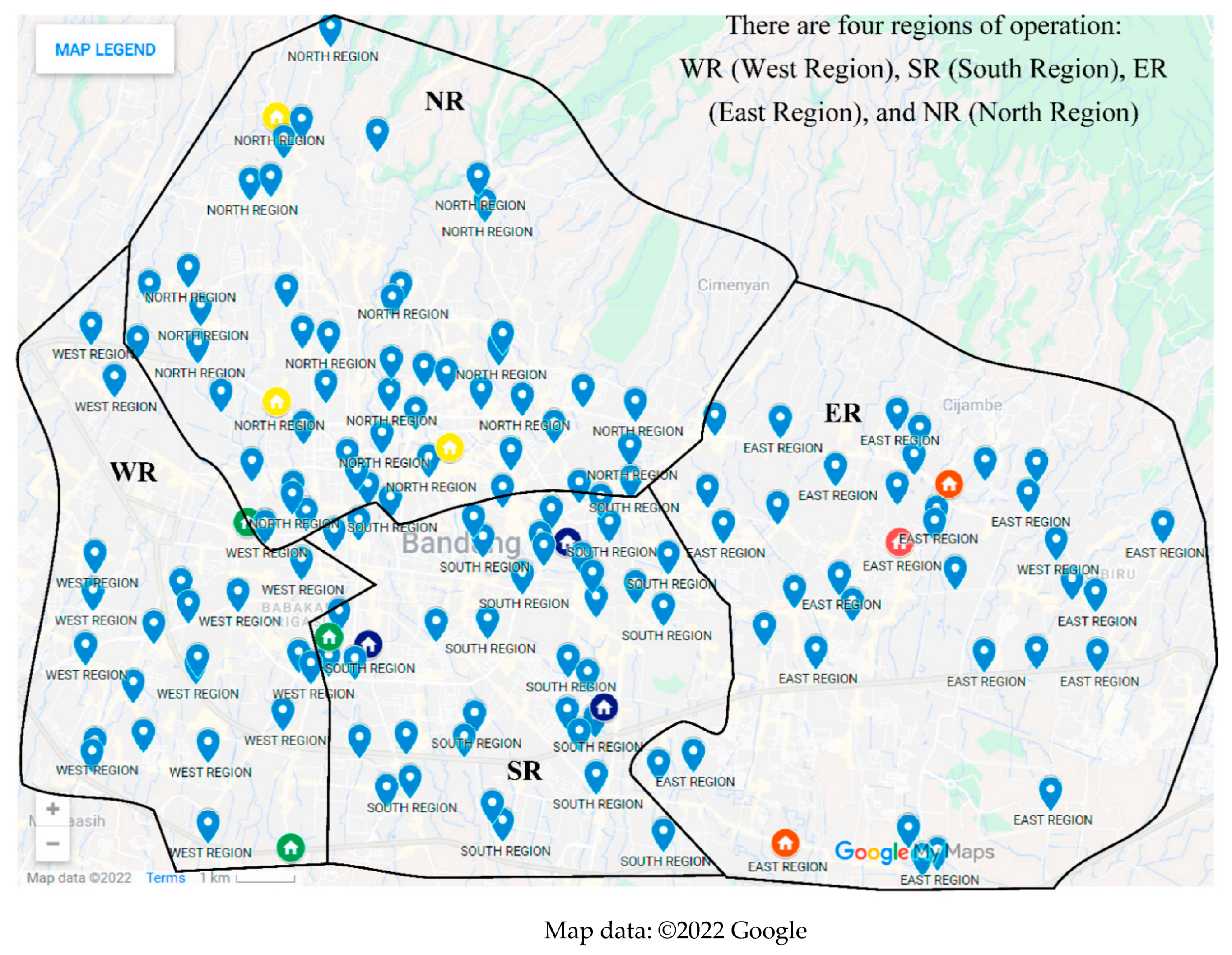
5.1. Case Study: Bandung
5.2. Experimental Results
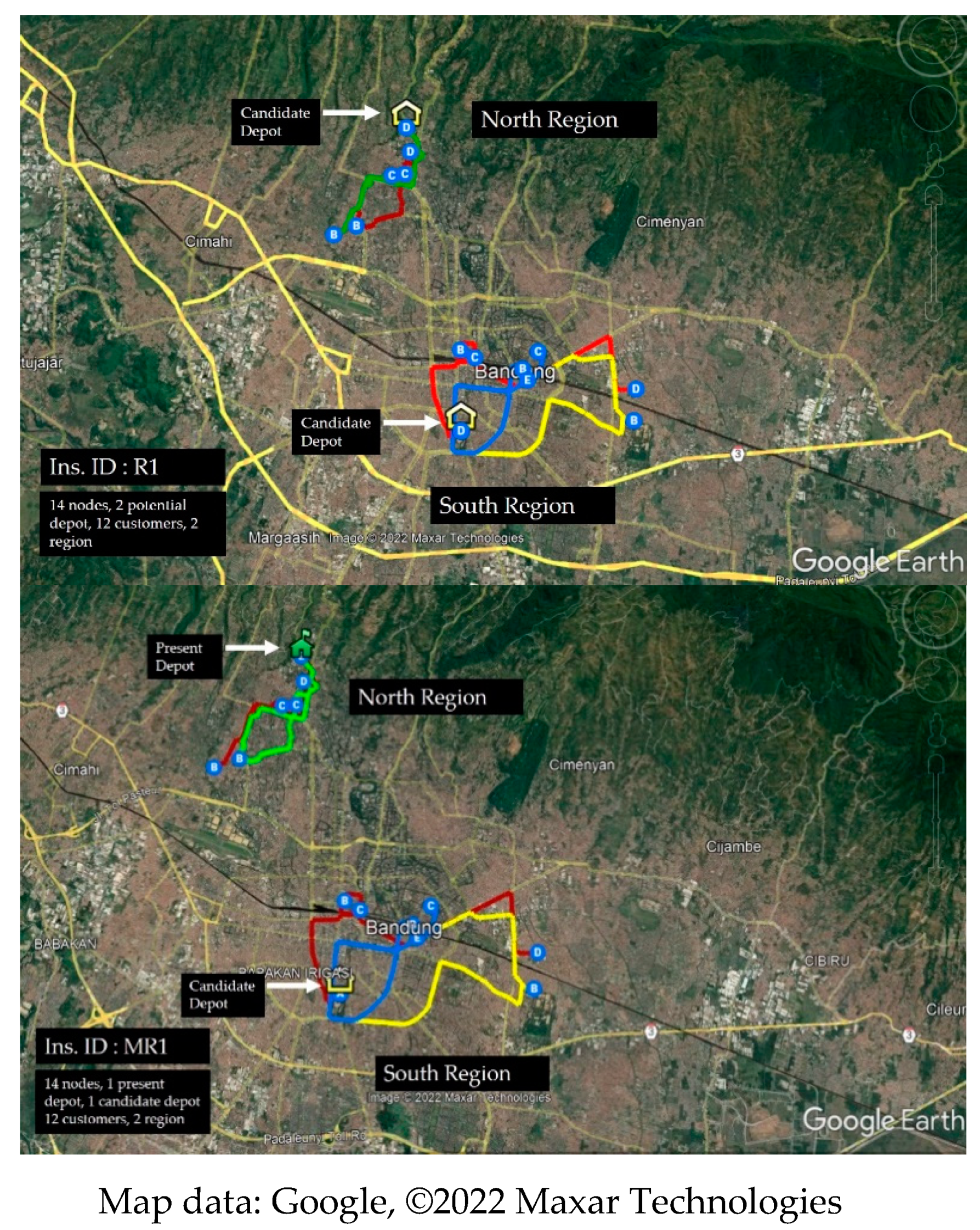
5.2.1. RLRP Dataset
5.2.2. MRLRP Dataset
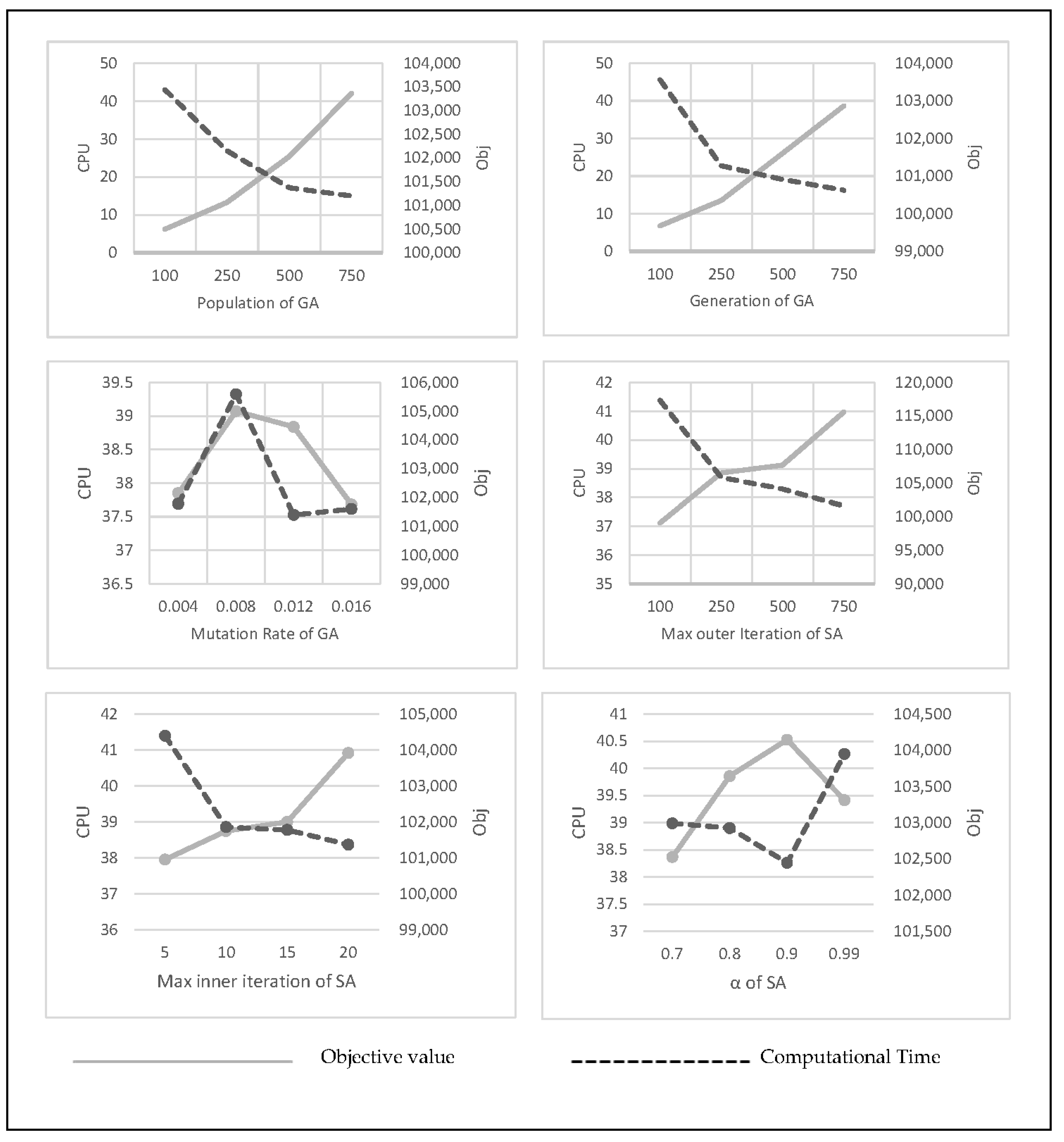
5.3. Sensitivity Analysis for GA and SA Parameters
5.4. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chromosome | Customer Node | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 5 | 14 | 8 | 7 | 3 | 12 | 11 | 6 | 9 | 10 | 13 | 4 |
| 2 | 9 | 7 | 11 | 14 | 6 | 10 | 3 | 13 | 8 | 4 | 12 | 5 |
| 3 | 10 | 7 | 3 | 5 | 14 | 13 | 4 | 9 | 12 | 8 | 11 | 6 |
| 4 | 3 | 10 | 5 | 12 | 8 | 9 | 11 | 7 | 6 | 14 | 4 | 13 |
| 5 | 7 | 13 | 8 | 10 | 12 | 3 | 9 | 5 | 6 | 4 | 14 | 11 |
| 6 | 6 | 8 | 14 | 9 | 3 | 4 | 13 | 12 | 7 | 11 | 10 | 5 |
| 7 | 7 | 3 | 5 | 8 | 13 | 9 | 11 | 10 | 4 | 14 | 12 | 6 |
| 8 | 3 | 14 | 12 | 13 | 6 | 5 | 4 | 8 | 11 | 7 | 9 | 10 |
| 9 | 10 | 8 | 14 | 12 | 11 | 13 | 4 | 5 | 6 | 7 | 9 | 3 |
| 10 | 4 | 8 | 5 | 10 | 13 | 3 | 9 | 14 | 11 | 6 | 12 | 7 |
Appendix C
| Chromosome | Customer Node | Fitness Value | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 5 | 14 | 8 | 7 | 3 | 12 | 11 | 6 | 9 | 10 | 13 | 4 | 123,117 |
| 2 | 9 | 7 | 11 | 14 | 6 | 10 | 3 | 13 | 8 | 4 | 12 | 5 | 129,960 |
| 3 | 10 | 7 | 3 | 5 | 14 | 13 | 4 | 9 | 12 | 8 | 11 | 6 | 109,699 |
| 4 | 3 | 10 | 5 | 12 | 8 | 9 | 11 | 7 | 6 | 14 | 4 | 13 | 112,264 |
| 5 | 7 | 13 | 8 | 10 | 12 | 3 | 9 | 5 | 6 | 4 | 14 | 11 | 101,833 |
| 6 | 6 | 8 | 14 | 9 | 3 | 4 | 13 | 12 | 7 | 11 | 10 | 5 | 132,268 |
| 7 | 7 | 3 | 5 | 8 | 13 | 9 | 11 | 10 | 4 | 14 | 12 | 6 | 84,500 |
| 8 | 3 | 14 | 12 | 13 | 6 | 5 | 4 | 8 | 11 | 7 | 9 | 10 | 112,148 |
| 9 | 10 | 8 | 14 | 12 | 11 | 13 | 4 | 5 | 6 | 7 | 9 | 3 | 96,237 |
| 10 | 4 | 8 | 5 | 10 | 13 | 3 | 9 | 14 | 11 | 6 | 12 | 7 | 133,538 |
Appendix D

Appendix E
| Genetic Algorithm | Simulated Annealing | ||||||
|---|---|---|---|---|---|---|---|
| Parameter | Level | Obj. | CPU | Parameter | Level | Obj. | CPU |
| Population | 100 | 103,443 | 6.22 | Max outer iterations | 100 | 117,353 | 37.12 |
| 250 | 102,150 | 13.30 | 250 | 105,834 | 38.86 | ||
| 500 | 101,372 | 25.42 | 500 | 104,124 | 39.13 | ||
| 750 | 101,199 | 42.06 | 750 | 101,605 | 40.98 | ||
| Generation | 100 | 103,559 | 6.79 | Max inner iterations | 5 | 104,394 | 37.96 |
| 250 | 101,276 | 13.52 | 10 | 101,859 | 38.75 | ||
| 500 | 100,909 | 26.05 | 15 | 101,781 | 39.01 | ||
| 750 | 100,624 | 38.67 | 20 | 101,372 | 40.92 | ||
| Mutation rate | 0.004 | 101,781 | 37.85 | α | 0.7 | 102,991 | 38.37 |
| 0.008 | 105,600 | 39.08 | 0.8 | 102,926 | 39.86 | ||
| 0.012 | 101,399 | 38.84 | 0.9 | 102,447 | 40.53 | ||
| 0.016 | 101,604 | 37.68 | 0.99 | 103,948 | 39.41 | ||
Appendix F
| GA vs. | GASA vs. | ||||
|---|---|---|---|---|---|
| BKS | Gurobi | BKS | Gurobi | ||
| RLRP datasets | Test on solution value | ||||
| W | −3.724 | −2.667 | −2.366 | −1.020 | |
| p-value | 0.000 | 0.018 | 0.008 | 0.308 | |
| Test on running time | |||||
| W | −3.233 | −3.233 | |||
| p-value | 0.001 | 0.001 | |||
| MRLRP datasets | Test on solution value | ||||
| W | −3.823 | −3.180 | −1.826 | −0.415 | |
| p-value | 0.000 | 0.001 | 0.068 | 0.678 | |
| Test on running time | |||||
| W | −3.170 | −3.107 | |||
| p-value | 0.002 | 0.002 | |||
Appendix G

References
- Boysen, N.; Fedtke, S.; Schwerdfeger, S. Last-mile delivery concepts: A survey from an operational research perspective. OR Spectr. 2020, 43, 1–58. [Google Scholar] [CrossRef]
- Haugland, D.; Ho, S.C.; Laporte, G. Designing delivery districts for the vehicle routing problem with stochastic demands. Eur. J. Oper. Res. 2007, 180, 997–1010. [Google Scholar] [CrossRef]
- Carlsson, J.G. Dividing a territory among several vehicles. INFORMS J. Comput. 2012, 24, 565–577. [Google Scholar] [CrossRef] [Green Version]
- Lei, H.; Laporte, G.; Liu, Y.; Zhang, T. Dynamic design of sales territories. Comput. Oper. Res. 2015, 56, 84–92. [Google Scholar] [CrossRef]
- Ouhader, H.; El Kyal, M. Combining facility location and routing decisions in sustainable urban freight distribution under horizontal collaboration: How can shippers be benefited? Math. Probl. Eng. 2017, 2017, 8687515. [Google Scholar] [CrossRef]
- Mara, S.T.W.; Kuo, R.; Asih, A.M.S. Location-routing problem: A classification of recent research. Int. Trans. Oper. Res. 2021, 28, 2941–2983. [Google Scholar] [CrossRef]
- Yu, V.F.; Lin, S.-W.; Lee, W.; Ting, C.-J. A simulated annealing heuristic for the capacitated location routing problem. Comput. Ind. Eng. 2010, 58, 288–299. [Google Scholar] [CrossRef]
- Dib, O.; Moalic, L.; Manier, M.A.; Caminada, A. An advanced GA–VNS combination for multicriteria route planning in public transit networks. Expert Syst. Appl. 2017, 72, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Jacobsen, S.K.; Madsen, O.B. A comparative study of heuristics for a two-level routing-location problem. Eur. J. Oper. Res. 1980, 5, 378–387. [Google Scholar] [CrossRef]
- Yu, V.F.; Lin, S.-Y. A simulated annealing heuristic for the open location-routing problem. Comput. Oper. Res. 2015, 62, 184–196. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, L. A new hybrid ant colony optimization algorithm for the vehicle routing problem. Pattern Recognit. Lett. 2009, 30, 848–855. [Google Scholar] [CrossRef]
- Fazayeli, S.; Eydi, A.; Kamalabadi, I.N. A model for distribution centers location-routing problem on a multimodal transportation network with a meta-heuristic solving approach. J. Ind. Eng. Int. 2018, 14, 327–342. [Google Scholar] [CrossRef] [Green Version]
- Rabbani, M.; Heidari, R.; Yazdanparast, R. A stochastic multi-period industrial hazardous waste location-routing problem: Integrating NSGA-II and Monte Carlo simulation. Eur. J. Oper. Res. 2019, 272, 945–961. [Google Scholar] [CrossRef]
- Peng, Z.; Manier, H.; Manier, M.-A. Particle swarm optimization for capacitated location-routing problem. IFAC-PapersOnLine 2017, 50, 14668–14673. [Google Scholar] [CrossRef]
- Panicker, V.V.; Reddy, M.V.; Sridharan, R. Development of an ant colony optimisation-based heuristic for a location-routing problem in a two-stage supply chain. Int. J. Value Chain. Manag. 2018, 9, 38–69. [Google Scholar] [CrossRef]
- Escobar, J.W.; Linfati, R.; Baldoquin, M.G.; Toth, P. A Granular Variable Tabu Neighborhood Search for the capacitated location-routing problem. Transp. Res. Part B Methodol. 2014, 67, 344–356. [Google Scholar] [CrossRef]
- Schneider, M.; Löffler, M. Large composite neighborhoods for the capacitated location-routing problem. Transp. Sci. 2019, 53, 301–318. [Google Scholar] [CrossRef]
- Derbel, H.; Jarboui, B.; Hanafi, S.; Chabchoub, H. Genetic algorithm with iterated local search for solving a location-routing problem. Expert Syst. Appl. 2012, 39, 2865–2871. [Google Scholar] [CrossRef]
- Karaoglan, I.; Altiparmak, F. A memetic algorithm for the capacitated location-routing problem with mixed backhauls. Comput. Oper. Res. 2015, 55, 200–216. [Google Scholar] [CrossRef]
- Khalili-Damghani, K.; Abtahi, A.-R.; Ghasemi, A. A new bi-objective location-routing problem for distribution of perishable products: Evolutionary computation approach. J. Math. Model. Algorithms Oper. Res. 2015, 14, 287–312. [Google Scholar] [CrossRef]
- Alinaghian, M.; Goli, A. Location, allocation and routing of temporary health centers in rural areas in crisis, solved by improved harmony search algorithm. Int. J. Comput. Intell. Syst. 2017, 10, 894–913. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Leng, L.; Wang, S.; Li, G.; Zhao, Y. A hyperheuristic approach for location-routing problem of cold chain logistics considering fuel consumption. Comput. Intell. Neurosci. 2020, 2020, 8395754. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Nie, L.; Xu, M. Designing an integrated distribution system for catering services for high-speed railways: A three-echelon location routing model with tight time windows and time deadlines. Transp. Res. Part C Emerg. Technol. 2017, 74, 212–244. [Google Scholar] [CrossRef]
- Suksee, S.; Sindhuchao, S. GRASP with ALNS for solving the location routing problem of infectious waste collection in the Northeast of Thailand. Int. J. Ind. Eng. Comput. 2021, 12, 305–320. [Google Scholar] [CrossRef]
- Gogna, A.; Tayal, A. Metaheuristics: Review and application. J. Exp. Theor. Artif. Intell. 2013, 25, 503–526. [Google Scholar] [CrossRef]
- Beheshti, Z.; Shamsuddin, S.M.H. A review of population-based meta-heuristic algorithms. Int. J. Adv. Soft Comput. Appl 2013, 5, 1–35. [Google Scholar]
- Jaddi, N.S.; Abdullah, S. Global search in single-solution-based metaheuristics. Data Technol. Appl. 2020, 54, 275–296. [Google Scholar] [CrossRef]
- Samsuddin, S.; Othman, M.S.; Yusuf, L.M. A review of single and population-based metaheuristic algorithms solving multi depot vehicle routing problem. Int. J. Softw. Eng. Comput. Syst. 2019, 4, 80–93. [Google Scholar] [CrossRef]
- Jeon, G.; Leep, H.R.; Shim, J.Y. A vehicle routing problem solved by using a hybrid genetic algorithm. Comput. Ind. Eng. 2007, 53, 680–692. [Google Scholar] [CrossRef]
- Sitek, P.; Wikarek, J. Capacitated vehicle routing problem with pick-up and alternative delivery (CVRPPAD): Model and implementation using hybrid approach. Ann. Oper. Res. 2019, 273, 257–277. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.-H.; Lu, J.-Z. A hybrid genetic algorithm that optimizes capacitated vehicle routing problems. Expert Syst. Appl. 2009, 36, 2921–2936. [Google Scholar] [CrossRef]
- Rodríguez-Martín, I.; Salazar-González, J.-J.; Yaman, H. A branch-and-cut algorithm for the hub location and routing problem. Comput. Oper. Res. 2014, 50, 161–174. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi-Javid, A.; Amiri, E.; Meskar, M. A profit-maximization location-routing-pricing problem: A branch-and-price algorithm. Eur. J. Oper. Res. 2018, 271, 866–881. [Google Scholar] [CrossRef]
- Nadizadeh, A.; Nasab, H.H. Solving the dynamic capacitated location-routing problem with fuzzy demands by hybrid heuristic algorithm. Eur. J. Oper. Res. 2014, 238, 458–470. [Google Scholar] [CrossRef]
- Prins, C.; Prodhon, C.; Ruiz, A.; Soriano, P.; Wolfler Calvo, R. Solving the capacitated location-routing problem by a cooperative Lagrangean relaxation-granular tabu search heuristic. Transp. Sci. 2007, 41, 470–483. [Google Scholar] [CrossRef]
- Ho, W.; Ho, G.T.; Ji, P.; Lau, H.C. A hybrid genetic algorithm for the multi-depot vehicle routing problem. Eng. Appl. Artif. Intell. 2008, 21, 548–557. [Google Scholar] [CrossRef]
- Marinakis, Y.; Marinaki, M. A hybrid genetic–Particle Swarm Optimization Algorithm for the vehicle routing problem. Expert Syst. Appl. 2010, 37, 1446–1455. [Google Scholar] [CrossRef]
- Kora, P.; Yadlapalli, P. Crossover operators in genetic algorithms: A review. Int. J. Comput. Appl. 2017, 162, 34–36. [Google Scholar] [CrossRef]
- Badan Pusat Statistik Kota Bandung. Bandung Municipality in Figures 2021; Bandung, B.K., Ed.; BPS Kota Bandung: Bandung, Indonesia, 2021; Available online: https://bandungkota.bps.go.id/publication/2021/02/26/2fb944aeb2c1d3fe5978a741/kota-bandung-dalam-angka-2021.html (accessed on 18 April 2022).





| Scenario | Details |
|---|---|
| S1 Regional Location Routing Problem (RLRP) | Prins et al. [35] use the location routing problem model as the base model. This model does not consider the closure of the existing depot. Note that a slight modification of the base model is made upon implementation by imposing the minimum number of depots in each area or region. The scenario denoted as represents a particular region, and represents the depot set located in region The minimum number of depots available in each region is denoted by . |
| S2 Multi-depot Regional Location Routing Problem (MRLRP) | The MRLRP variant of the RLRP model considers two depots: the present depot ( ) and candidate depot () In this scenario the objective function is modified from the RLRP model and considers parameters as fixed costs when opening or closing the depot. |
| Depot | Customer | ||||||
|---|---|---|---|---|---|---|---|
| Depot No. | Depot Capacity | Latitude | Longitude | Customer No. | Demand (Waste Volume) | Latitude | Longitude |
| 1 | 1200 | −6.85 | 107.59 | 3 | 39.49 | −6.88 | 107.58 |
| 2 | 1200 | −6.93 | 107.61 | 4 | 45.39 | −6.88 | 107.57 |
| 5 | 14 | −6.86 | 107.58 | ||||
| 6 | 16 | −6.87 | 107.60 | ||||
| 7 | 4.5 | −6.86 | 107.60 | ||||
| 8 | 9.08 | −6.92 | 107.62 | ||||
| 9 | 27.37 | −6.91 | 107.62 | ||||
| 10 | 1.78 | −6.91 | 107.60 | ||||
| 11 | 31.93 | −6.91 | 107.61 | ||||
| 12 | 4 | −6.91 | 107.60 | ||||
| 13 | 33.39 | −6.92 | 107.65 | ||||
| 14 | 43.56 | −6.92 | 107.64 | ||||
| Ins ID | Parameter | BKS | Gurobi | GA | GASA | Gapa % | Gapb % | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Cus. | Dep. | Reg. | Min Dep. Reg. | VCap. | Obj. | CPU | Obj. (Best) | Obj. (Avg) | Gapc % | CPU | Obj. (Best) | Obj. (Avg) | Gapd % | CPU | ||||
| R1 | 12 | 2 | 2 | 1 | 60 | 68,319 | 68,319 | 1.297 | 68,319 | 71,345 | −4.24 | 3.23 | 68,319 | 68,661 | −0.50 | 3.23 | 0.00 | 0.00 |
| R2 | 14 | 4 | 2 | 1 | 60 | 59,983 | 59,983 | 51.031 | 59,983 | 62,982 | −4.76 | 6.017 | 59,983 | 60,283 | −0.50 | 6.017 | 0.00 | 0.00 |
| R3 | 18 | 6 | 3 | 1 | 60 | 77,671 | 77,671 | 4596.72 | 81,615 | 85,696 | −4.76 | 6.77 | 79,024 | 79,419 | −0.50 | 8.87 | 0.05 | 0.02 |
| R4 | 18 | 6 | 3 | 2 | 60 | 79,024 | 79,024 | 39 | 80,833 | 84,875 | −4.76 | 6.75 | 79,024 | 79,419 | −0.50 | 8.87 | 0.02 | 0.00 |
| R5 | 24 | 8 | 3 | 1 | 60 | 97,106 | 97,106 | 18,000 | 113,027 | 118,678 | −4.76 | 7.82 | 100,199 | 100,698 | −0.50 | 10.14 | 0.16 | 0.03 |
| R6 | 24 | 8 | 3 | 2 | 60 | 99,038 | 99,038 | 18,000 | 107,337 | 112,704 | −4.76 | 7.9 | 100,199 | 100,700 | −0.50 | 10.12 | 0.08 | 0.01 |
| R7 | 28 | 10 | 4 | 1 | 60 | 108,734 | 111,633 | 18,000 | 122,971 | 129,120 | −4.76 | 8.71 | 108,734 | 109,278 | −0.50 | 11.52 | 0.13 | 0.00 |
| R8 | 28 | 10 | 4 | 2 | 60 | 111,224 | 111,633 | 18,000 | 126,380 | 132,699 | −4.76 | 9.38 | 111,224 | 111,780 | −0.50 | 12.2 | 0.14 | 0.00 |
| R9 | 36 | 12 | 4 | 1 | 60 | 131,858 | 131,858 | 18,000 | 161,033 | 169,085 | −4.76 | 10.74 | 134,685 | 135,358 | −0.50 | 14.35 | 0.22 | 0.02 |
| R10 | 36 | 12 | 4 | 2 | 60 | 133,942 | 134,790 | 18,000 | 161,155 | 169,213 | −4.76 | 10.56 | 133,942 | 134,612 | −0.50 | 14.15 | 0.20 | 0.00 |
| R11 | 55 | 12 | 4 | 1 | 70 | 155,323 | 155,323 | 18,000 | 213,928 | 224,624 | −4.76 | 17.34 | 159,049 | 159,844 | −0.50 | 25.01 | 0.38 | 0.02 |
| R12 | 55 | 12 | 4 | 2 | 70 | 157,326 | 157,326 | 18,000 | 203,547 | 213,724 | −4.76 | 18.07 | 158,558 | 159,351 | −0.50 | 26.17 | 0.29 | 0.01 |
| R13 | 81 | 12 | 4 | 1 | 70 | 236,882 | N/A | - | 400,925 | 420,971 | −4.76 | 45.9 | 236,882 | 238,066 | −0.50 | 60.16 | 0.69 | 0.00 |
| R14 | 81 | 12 | 4 | 2 | 70 | 234,576 | 383,266 | 18,000 | 370,470 | 388,994 | −4.76 | 41.4 | 234,576 | 235,749 | −0.50 | 55.94 | 0.58 | 0.00 |
| R15 | 81 | 12 | 4 | 1 | 80 | 206,012 | 206,012 | 6109.59 | 387,943 | 407,340 | −4.76 | 41.5 | 228,877 | 230,021 | −0.50 | 57.8 | 0.88 | 0.11 |
| R16 | 81 | 12 | 4 | 2 | 80 | 225,483 | N/A | - | 349,678 | 367,162 | −4.76 | 42.6 | 225,483 | 226,610 | −0.50 | 59.1 | 0.55 | 0.00 |
| R17 | 114 | 12 | 4 | 1 | 80 | 334,055 | N/A | - | 578,311 | 607,227 | −4.76 | 124.8 | 334,055 | 335,725 | −0.50 | 146.03 | 0.73 | 0.00 |
| R18 | 114 | 12 | 4 | 2 | 80 | 329,100 | N/A | - | 577,099 | 605,954 | −4.76 | 125.2 | 329,100 | 330,746 | −0.50 | 146.7 | 0.75 | 0.00 |
| R19 | 142 | 12 | 4 | 1 | 100 | 473,491 | N/A | - | 906,360 | 951,678 | −4.76 | 140.77 | 473,491 | 475,858 | −0.50 | 167.57 | 0.91 | 0.00 |
| R20 | 142 | 12 | 4 | 2 | 100 | 448,238 | N/A | - | 852,295 | 894,910 | −4.76 | 141.21 | 448,238 | 450,479 | −0.50 | 168.31 | 0.90 | 0.00 |
| Average | 12,342.69 | −4.74 | 40.83 | −0.50 | 50.61 | 0.38 | 0.01 | |||||||||||
| Ins ID | Parameter | BKS | Gurobi | GA | GASA | Gapa % | Gapb % | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Cus. | Dep. Pres. | Dep. Can. | Reg. | Min Dep. Reg. | VCap. | Obj. | CPU | Obj. (Best) | Obj. (Avg) | Gapc % | CPU | Obj. (Best) | Obj. (Avg) | Gapd % | CPU | ||||
| MR1 | 12 | 1 | 1 | 2 | 1 | 60 | 69,319 | 69,319 | 0.922 | 69,319 | 70,012 | −0.99 | 4.16 | 69,319 | 69,666 | −0.50 | 6.21 | 0.00 | 0.00 |
| MR2 | 14 | 1 | 3 | 2 | 1 | 60 | 62,585 | 62,585 | 32.687 | 64,370 | 65,014 | −0.99 | 5.1 | 62,585 | 62,898 | −0.50 | 7.616 | 0.03 | 0.00 |
| MR3 | 18 | 2 | 4 | 3 | 1 | 60 | 80,671 | 80,671 | 34.25 | 85,171 | 86,023 | −0.99 | 6.57 | 82,024 | 82,434 | −0.50 | 9.83 | 0.06 | 0.02 |
| MR4 | 18 | 2 | 4 | 3 | 2 | 60 | 82,025 | 82,025 | 7.985 | 88,071 | 88,951 | −0.99 | 6.58 | 82,025 | 82,435 | −0.50 | 9.87 | 0.07 | 0.00 |
| MR5 | 24 | 2 | 6 | 3 | 1 | 60 | 100,569 | 101,908 | 18,000 | 123,820 | 125,058 | −0.99 | 8.126 | 100,569 | 101,072 | −0.50 | 11.774 | 0.23 | 0.00 |
| MR6 | 24 | 3 | 5 | 3 | 2 | 60 | 99,624 | 99,624 | 6858.77 | 118,283 | 119,466 | −0.99 | 7.92 | 99,624 | 100,122 | −0.50 | 11.49 | 0.19 | 0.00 |
| MR7 | 28 | 3 | 7 | 4 | 1 | 60 | 114,530 | 116,435 | 18,000 | 145,759 | 147,217 | −0.99 | 8.7 | 114,530 | 115,103 | −0.50 | 12.608 | 0.27 | 0.00 |
| MR8 | 28 | 3 | 7 | 4 | 2 | 60 | 112,017 | 116,435 | 18,000 | 157,384 | 158,958 | −0.99 | 8.645 | 112,017 | 112,577 | −0.50 | 12.525 | 0.41 | 0.00 |
| MR9 | 36 | 3 | 9 | 4 | 1 | 60 | 137,582 | 137,790 | 18,000 | 162,708 | 164,335 | −0.99 | 11.23 | 137,582 | 138,270 | −0.50 | 15.799 | 0.18 | 0.00 |
| MR10 | 36 | 3 | 9 | 4 | 2 | 60 | 135,707 | 137,790 | 18,000 | 170,166 | 171,868 | −0.99 | 11.4 | 135,707 | 136,386 | −0.50 | 16.1 | 0.25 | 0.00 |
| MR11 | 55 | 3 | 9 | 4 | 1 | 70 | 161,338 | 161,338 | 18,000 | 284,462 | 287,307 | −0.99 | 15.418 | 164,900 | 165,725 | −0.50 | 21.52 | 0.76 | 0.02 |
| MR12 | 55 | 3 | 9 | 4 | 2 | 70 | 160,620 | 160,620 | 1247.42 | 246,332 | 248,795 | −0.99 | 15.54 | 160,620 | 161,423 | −0.50 | 21.74 | 0.53 | 0.00 |
| MR13 | 81 | 4 | 8 | 4 | 1 | 70 | 243,847 | N/A | - | 400,308 | 404,311 | −0.99 | 20.81 | 243,847 | 245,066 | −0.50 | 29.757 | 0.64 | 0.00 |
| MR14 | 81 | 4 | 8 | 4 | 2 | 70 | 236,264 | N/A | - | 492,545 | 497,470 | −0.99 | 20.7 | 236,264 | 237,445 | −0.50 | 29.5 | 1.08 | 0.00 |
| MR15 | 81 | 4 | 8 | 4 | 1 | 80 | 214,991 | 214,991 | 18,000 | 417,620 | 421,796 | −0.99 | 20.22 | 229,602 | 230,750 | −0.50 | 28.367 | 0.94 | 0.07 |
| MR16 | 81 | 4 | 8 | 4 | 2 | 80 | 219,161 | 219,161 | 18,000 | 460,555 | 465,161 | −0.99 | 20.6 | 224,586 | 225,709 | −0.50 | 29.1 | 1.10 | 0.02 |
| MR17 | 114 | 4 | 8 | 4 | 1 | 80 | 334,792 | N/A | - | 797,049 | 805,020 | −0.99 | 29.09 | 334,792 | 336,466 | −0.50 | 48.87 | 1.38 | 0.00 |
| MR18 | 114 | 4 | 8 | 4 | 2 | 80 | 321,570 | N/A | - | 839,465 | 847,860 | −0.99 | 29.2 | 321,570 | 323,178 | −0.50 | 49 | 1.61 | 0.00 |
| MR19 | 142 | 4 | 8 | 4 | 1 | 100 | 442,832 | N/A | - | 999,450 | 100,9445 | −0.99 | 35.7 | 442,832 | 445,046 | −0.50 | 53.77 | 1.26 | 0.00 |
| MR20 | 142 | 4 | 8 | 4 | 2 | 100 | 423,353 | N/A | - | 117,8817 | 119,0605 | −0.99 | 35.8 | 423,353 | 425,470 | −0.50 | 54.87 | 1.78 | 0.00 |
| Average | 10,870.15 | −0.99 | 16.08 | −0.50 | 24.02 | 0.64 | 0.01 | ||||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, V.F.; Aloina, G.; Susanto, H.; Effendi, M.K.; Lin, S.-W. Regional Location Routing Problem for Waste Collection Using Hybrid Genetic Algorithm-Simulated Annealing. Mathematics 2022, 10, 2131. https://doi.org/10.3390/math10122131
Yu VF, Aloina G, Susanto H, Effendi MK, Lin S-W. Regional Location Routing Problem for Waste Collection Using Hybrid Genetic Algorithm-Simulated Annealing. Mathematics. 2022; 10(12):2131. https://doi.org/10.3390/math10122131
Chicago/Turabian StyleYu, Vincent F., Grace Aloina, Hadi Susanto, Mohammad Khoirul Effendi, and Shih-Wei Lin. 2022. "Regional Location Routing Problem for Waste Collection Using Hybrid Genetic Algorithm-Simulated Annealing" Mathematics 10, no. 12: 2131. https://doi.org/10.3390/math10122131