1. Introduction
We consider small damped oscillations in the absence of gyroscopic forces, described by the vector differential equation
where
and
K (mass, damping, and stiffness matrices, respectively) are real, symmetric matrices of order
n.
The main problem considered in this paper is the derivation (or computation) of the optimal damping for vibrating systems, such as those mentioned above, for the case where the damping matrix becomes singular. The problem of damping optimization is part of a very interesting and active research area where several different approaches exist. Damping optimization is usually a very demanding problem; moreover, the problem of optimizing damping positions with viscosities still has no satisfactory solution.
Damping optimization contains two different sub-problems, including one in which the mass matrix is non-singular and one in which the mass matrix can be singular.
Damping optimization with non-singular mass has been widely investigated during the last two decades. Some of the results concerning the so-called stationary system can be found in [
1,
2,
3,
4,
5,
6,
7,
8,
9]. A more detailed description of these references can be found in [
10].
On the other hand, the problem of non-stationary systems has been considered in [
10,
11,
12].
Here,
M,
K, and
C are large, usually of order
, and do not have a prescribed structure;
M and
K are very often diagonal, tridiagonal, or some other structure, depending on the application. It is important to emphasize that the assumptions concerning the mass and the damping matrix do not allow the use of standard deflation techniques as in [
13,
14], nor the frequency domain approach from [
15] because
M and
C cannot be diagonalized simultaneously.
A damping matrix can be defined in several different ways. One of the most common ways is that , where represents internal damping, and only the external damping part depends on the parameters (called viscosities). Moreover, external damping can be written as , where determines the geometry of the i-th damper, and it has a small rank, so that is a semidefinite matrix.
Internal damping,
, can be modeled in different ways. The most popular is the classical Rayleigh damping:
However, throughout this paper, we use the definition that internal damping is a small multiple of critical damping; that is, in the case of critical damping
see, e.g., [
16,
17]. More details regarding the model can be found in [
6,
7,
11,
16,
18,
19,
20,
21,
22].
There are several different (damping) optimization criteria, and the most common ones are based on the asymptotic approach or the approach in which the damping criterion is based on an infinite time scale. For example, in [
12,
23,
24,
25,
26], the optimal displacement or optimal damper positions are based on the criterion that considers asymptotical behavior. On the other hand, in [
10], the optimization criteria are defined over the basic period of the periodic external force
.
In this paper, we consider the optimization process based on the so-called energy minimization criterion, which is equivalent to the minimization of the trace of the solution of the Lyapunov equation
For the case where M can be singular, the matrix A that depends on M, D, and K must be carefully constructed because standard linearization is not possible. The particular construction of the matrix A is one of our novel results.
Further, the optimal damping is obtained from the following optimization process:
where the damping matrix is given as
. For the physical background of this penalty function, see [
19,
20,
27].
Here,
Z is a symmetric positive semidefinite matrix, usually defined as
where
denotes an identity matrix of dimension
s.
As was shown in [
3] (or [
27]), the above optimization criterion is equivalent to the minimization of the mean value of the total energy of all initial data. More details about the construction of the matrix
Z can be found in [
3].
In this paper, we consider two different cases (two different structures) of damping matrices. In the first part of the paper, we assume that the damping matrix is given as
, that is, that the internal damping is zero (
). For this particular case, we additionally assume that the dimension of the null space of the mass matrix
. For this case, we derive the formula for the solution
X of the Lyapunov Equation (
3) as a function of
v; this allows us to discuss some properties of the solution and to find the graph of the meromorphic function
by finding its poles and performing a corresponding partial fraction decomposition.
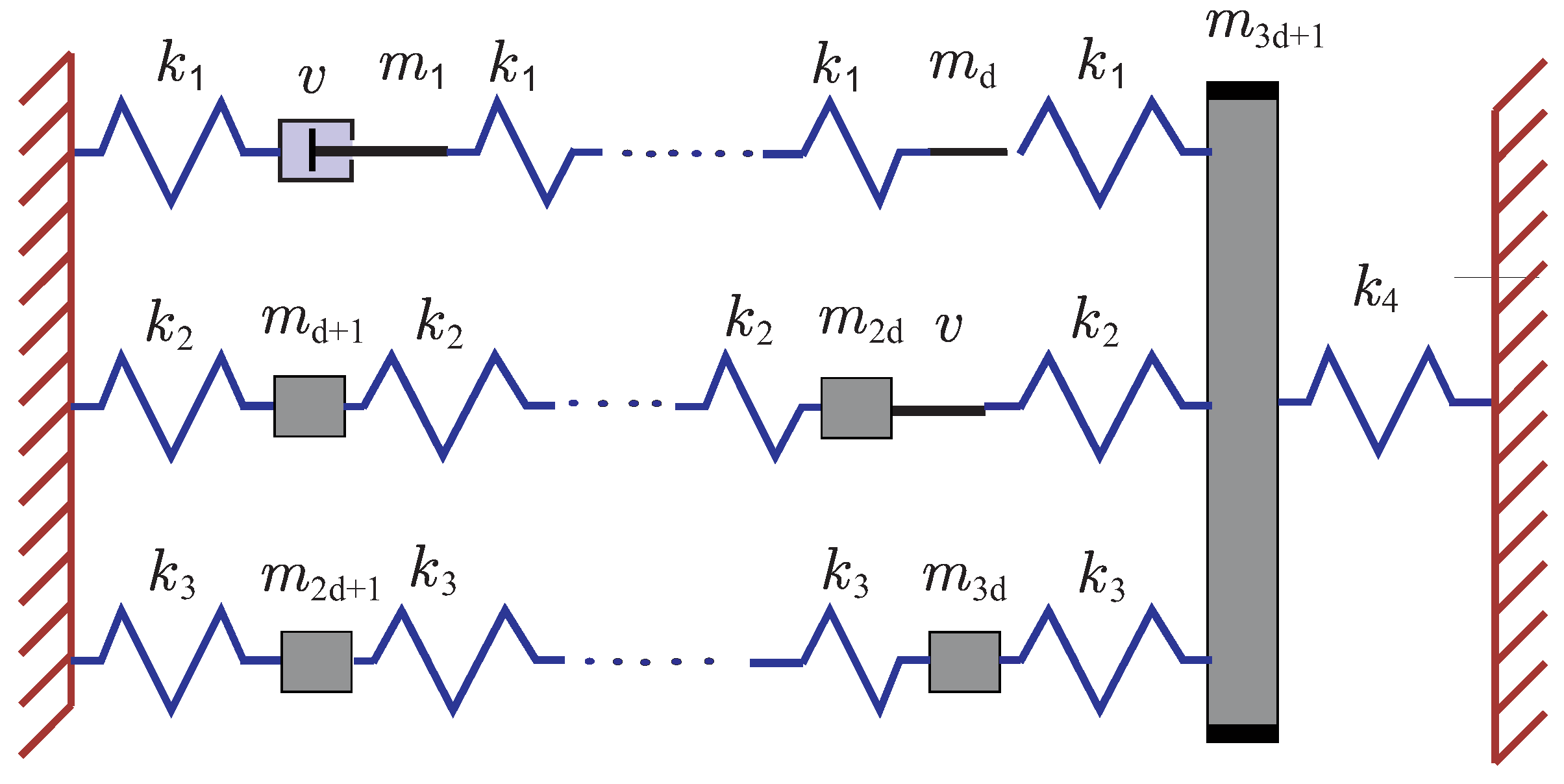
An example of such a system is the so-called
n-mass oscillator or
oscillator ladder (
Figure 1), where
Here,
are the masses,
are the spring constants or stiffnesses,
is the
i-th canonical basis vector, and
v is the viscosity of the damper applied on the
i-th mass. Note that, for the system presented in
Figure 1, the rank of the matrix
is one.
The first part of this paper is devoted to structures similar to the one in
Figure 1. For example, in the mass-spring system shown in (
6)–(
8), if one of the masses, for example,
, were to vanish (that is, if one mass were substituted with a damper or if it were sufficiently smaller then the others such that it could be neglected), then the mass matrix
M would be singular, and the standard linearization would not be possible. In fact, in such a case, we could not prescribe the initial velocity
, and the phase space would have a dimension less than
. This would be even more the case if there were no damping at the position in question; then, we could not even prescribe
. More details on this type of structure can be found in [
11].
Since we have a strong structure in the first part of the paper ( and ) and, as a result, we present a formula for the solution , we refer to this as the“theoretical part”. As we see in the numerical examples, the structures are extremely unstable without internal damping, and it is hard to calculate any quantities for when .
Thus, in the second part of the paper, we assume that
and
(usually a small percentage of the critical damping). The second part of the paper is the “numerical part” or “numerical point of view”. In this part, we present a novel construction of the matrix
A in the Lyapunov Equation (
3) and a novel optimization process that is based on the properties of the formula obtained in the first part of the paper and the new approximated (projected) Lyapunov equation. Our optimization process is based on the idea of approximating the trace function
with its approximation
which allows us to find the minima. Here,
a,
b, and
are obtained by simple interpolation using the approximate trace function
through the three points
and
, where
is the solution of the approximate Lyapunov equation
and
is the projected matrix
A of smaller dimension.
A similar formula was obtained in [
20] for the case
, while the case
seems to be more difficult to handle, as shown in [
10,
21].
As we see in the section that includes the numerical illustrations, our approach speeds up the viscosity optimization process by 3 to 10 times.
We would like to emphasize that damping optimization using criterion (
4) requires solving the Lyapunov Equation (
3) numerous times, which may be inefficient, as well as memory- and time-consuming. However, most of the usual (engineering) approaches that assume that all three matrices
M,
C, and
K can be simultaneously diagonalized are inappropriate here due to the structure of the damping matrix.
The paper is organized as follows. In
Section 2, we present the novel formula for the solution
X of the Lyapunov Equation (
3) as the function of the viscosity parameter
v. In
Section 3, we present a novel approach to calculating the optimal damping matrix
D, which includes quasi-optimal positions together with the corresponding optimal viscosity parameter. At the end of
Section 3, we illustrate the main results using a numerical example.
2. The Singular Mass Case,
As we emphasized in the introduction, the damped mass-spring system with a singular mass matrix deserves special treatment since standard linearization is not possible. For this purpose, we use the results from the book [
11] by Krešimir Veselić on the linearization of damped mass-spring systems with singular mass.
Without losing on generality, we assume that
is a real non-singular matrix such that
where
o is a zero vector of dimension
,
. Then, the matrix is as follows:
We now proceed to construct the phase-space formulation of (
1), which, after the substitution
, with
from (
11), reads
Here, it is important to emphasize that the assumption that
distinguishes this system from others obtained simply by deflation; that is, when one has a damping such that
, then (
12) is equivalent with a system
of two independent equations, and it can be considered similar to [
28,
29].
By introducing the new variables
the system (
12) becomes
which yields the following linearization:
Recall that the first problem is to find a formula for the solution of the Lyapunov Equation (
3).
Thus, we continue with deriving the solution of the Lyapunov Equation (
3) using the matrix
A form (
16), that is:
Before we continue, we denote that
,
is an
dimensional vector, and
. This implies
The above Lyapunov Equation (
18) is equivalent to the following 6 equations:
From Equation (
19), it follows
which implies
for
and
. This further gives us
From Equation (
24), it follows
which, using Equation (
25), gives
Diagonal entries in Equation (
26) give
or
which gives the unknown vector
.
Now, we can obtain the matrix
S. Indeed, from Equation (
26), for
, it follows
which gives
Once we have skew-symmetric
S, we can derive
. From Equation (
25), it follows that
where
is Kronecker’s delta.
We proceed to considering Equation (
20), which gives
or
which gives:
Further, from Equation (
22), it follows
Using the fact that
(which can bee seen from Equation (
27)), it follows
The remaining two diagonal blocks
and
we derive using Equations (
23) and (
21). Thus, from Equation (
21), one obtains
using the symmetry of
and
from Equation (
32), it follows
Now, Equations (
32) and (
33) imply
From Equation (
34), for
, it follows
or
On the other hand, from Equation (
32), it follows
Finally, we can obtain the diagonal entries for both matrices
and
from Equation (23). Indeed, for the diagonal entries of
, one obtains:
and
Now, the trace of the solution
X of the Lyapunov Equation (
3) can be obtained as
or
As one can see from the structure of Equation (
36), the formula for the trace is very complicated, even for this special case in which the damping matrix is of rank one. Moreover, if
has just one non-zero entire function, that is, if
, where
denotes the
i-th canonical vector, the formula for the trace of
is still complicated. Indeed, if we let
Z be defined as
, then
where
and where
,
, and
can be obtained from Equations (
35), (
27), and (
30), respectively.
Once again, we see that Formula (
37) for the trace of the solution of the Lyapunov Equation (
3) is still very complicated, which is partly a consequence of the fact that we use all entries of the solution for the sum of the diagonal entries.
Thus, the formulas presented in this section serve primarily as a way to find an implicit formula for the solution and a corresponding partial fraction decomposition for the function .
On the other hand, as we see in the next section, we only need the trace of the solution for the optimization process, which can be obtained much more efficiently for a certain setting.
3. Damping Optimization
Recall that, in the optimization process, we must find such
c, viz.
, such that
where
X is a solution of the following Lyapunov equation:
where
A is defined as in (
17), and
Z is defined as in (
5).
Usually, the optimization procedure means that we choose a vector (depending on the position of the damper)
, and then find the corresponding optimal viscosity by simply solving
Once we find the optimal damping vector , we continue the same process for the next vector . After obtaining a set of “optimal vectors” for the global optimization vector, we choose one that produces the smallest .
One can see that, even in this very simple case (rank one damping), the whole optimization process is computationally demanding.
Therefore, we propose here a novel approach that allows us to very efficiently calculate a quasi-optimal damping vector .
3.1. Case 1
As in the first case, consider the optimization problem
where
X is the solution of the Lyapunov Equation (
50),
A is defined as in (
17), and
Z is defined as
for some
.
As shown in the previous section for this case, the trace is equal to
Now, we propose a novel approach. Instead of choosing the first (position) vector
and deriving an optimal viscosity using Formulas (
37), (
35), (
27), and (
30) to give us the first optimal vector
, we assume that an optimal position vector
has the following form:
This means that , which greatly simplifies the computation of the trace.
The choice of this we call quasi-optimal.
Now, multiplying Equation (
23) by
from the right-hand side, we obtain
or
This all implies that the trace of the solution of the Lyapunov Equation (
50) is given as
For this simplified case, a simple calculation yields
The new, simplified formula for the trace reads:
The optimal viscosity
is a stationary point of the
, that is
This means that the optimal damping vector is given by
3.2. Case 2
As in the second case, we consider the similar optimization problem
where
X is the solution of the Lyapunov Equation (
50),
A is defined as in (
17), but
Z is defined as
where
for some
.
For simplicity, let us assume that
, viz.
where
denotes a zero matrix of dimension
.
Then, similarly to Case 1, we can determine for the case and for the case .
Now, we define the quasi-optimal damping matrix as
3.3. Numerical Example: Rank One
We now illustrate the results from
Section 3.1 with a simple numerical example describing the mass-spring system (
6)–(
8).
For simplicity, we take
, all
, for
and
and all
for
, yielding
We define the damping matrix
as a function of the viscosity parameter
v and damper positions
, with two different structures.
where
denotes the
i-th canonical basis vector of dimension
.
Table 1 shows the optimal values of the trace function
, for
where
denotes the 3-th canonical basis vector of dimension
.
As can be seen from
Table 1, it is obvious that “the best possible damping matrix” is
with optimal viscosity
, which is consistent with the results from
Section 3.1.
We want to emphasize that, for all other positions within structure 2, the system is extremely unstable; therefore, we add a small perturbation (of single precision order), which results in traces .
4. The Singular Mass Case,
As we described in the introduction, in this section, we consider a slightly different configuration.
Recall that we are considering a system of differential Equations (
1), viz.
where
and
K (mass, damping, and stiffness matrices, respectively) are real, symmetric matrices of order
n.
Let
be a real non-singular matrix, such that
,
, and
, which means that we can write:
where
and
are quadratic matrices of dimension
, with zeros and
corresponding, respectively, with zero eigenvalues in the matrix
M. Further,
, where
.
In addition, we assume here that
, and the damping is defined as
Then, the damping matrix has the form
Similarly to
Section 2, in the first part of this section, we derive a new “linearized” system of differential equations.
First, note that all the above imply that
where
, and
and
are of dimension
and
m, respectively.
Let us emphasize again that the assumption
distinguishes the system under consideration from other (usually considered) systems obtained simply by deflation. If we were to have a damping such that
, then (
43) would be equivalent to a system
of two independent equations that represent a system of differential algebraic equations and would be considered similar to [
28,
29].
By introducing the new variables
the system (
43) becomes
which yields to the following linearization:
We would like to emphasize that if
, then the linearization (
48) would become
which is the standard linearization used in many papers, such as [
3,
4,
5,
6,
7].
Again, our goal is to find such an external damping
such that
where
X is a solution of the following Lyapunov equation:
where
A is defined as in (
48), and
Z is defined as in (
5).
Recall that from (
36), in the case of
and
(no internal damping), we have
This and (
38) imply that, for the one-dimensional singularity case, the trace function has the following form:
where the constants
,
, and
are obtained from (
36) and (
38).
This result is quite similar to the formula obtained in [
20] for the case with non-singular mass
M and rank one damping.
Unfortunately, at the moment, we do not have a similar formula for damping with a rank larger than one. Thus, we propose a new (projection) approximation for solving Lyapunov Equation (
50).
Further, we take advantage of the fact that, for the solution
X of the Lyapunov Equation (
50) and the solution
Y of the so-called dual Lyapunov equation
it holds that
Thus, in what follows, instead of
A from (
48) and
Z from (
5), we consider the projected Lyapunov equation
where
where
and
are
p dimensional principal submatrices of
and
, respectively. The matrix
is obtained as the direct sum of two
p dimensional submatrices of the matrix
Z. That is, if
, where
is
and
is
with
(identity of order
s) as principal submatrix, respectively, then
where
is a
dimensional matrix, and
is a
dimensional matrix, where both have
as principal submatrix. Note that the matrices in the projected Lyapunov Equation (
53) have dimensions
.
We now illustrate the efficiency of the above approach. We have noticed that, in many applications, the reduced dimension is between the order of s (half the rank of the projection matrix Z from the right-hand side of the Lyapunov equation) up to two or three times s. Thus, if and we set , this means that any direct Lyapunov solver requiring (such as Bartels–Stewart or Hammerling) requires for the projected equations, which represents a speed increase of a factor more than 100. Obviously, the increase in speed can be even larger if the rank of the matrix Z is smaller.
To demonstrate the accuracy of the obtained approximation, we propose a simple residual error. Indeed, after solving the Lyapunov Equation (
52), we have the approximate solution
Now, our approximation of the full dimension can be defined as
Let
A be full dimensional matrix form (
52); then, the residual is simply defined as
The error that determines our tolerance is defined as
Finally, for the optimization process, we propose an approach similar to parabolic minimization, but instead of using parabolic model functions, we propose using hyperbolic functions
where
, and
c are determined by a simple interpolation through the three previously determined points
and
. The zero of
is our first approximation for the optimal
v. Now, one of the previous points
is replaced by this new minimum
, and the process is repeated until the selected tolerance level is attained.
All of the above considerations are presented in Algorithm 1. After performing one offline step of the simultaneous diagonalization of matrices
M and
K as in (
42),
and setting (or defining) the damper “positions” (geometry),
we can present Algorithm 1.
| Algorithm 1: Calculate optimal viscosity |
- Require:
, , - starting viscosites, Z, , , , - Ensure:
- 1:
for, define do - 2:
- 3:
corresponding as in ( 53) and as in ( 54) - 4:
define reduced dimension p, and calculate approximate solution of - 5:
check does from ( 56) satisfy - 6:
if , for from ( 56) then - 7:
continue to 11: - 8:
else increase p and go to 4: - 9:
end if - 10:
end for - 11:
For the model function
use standard linear least squares method through the points to determine a, b, and c- 12:
- the first approximation of optimal viscosity - 13:
fordo - 14:
- 15:
- 16:
- 17:
calculate approximate solution of - 18:
determine new set (leave new minimum and its “neighbors”) - 19:
determine new a, b, and c for the new points - 20:
- the new approximation of optimal viscosity - 21:
then - 22:
- 23:
else goto 8: - 24:
end if - 25:
end for
|
6. Conclusions
This paper contains two novel results for small damped oscillations described by the vector differential equation , where the mass matrix M can be singular, but standard deflation techniques cannot be applied. For example, .
The first result is the novel formula for the solution X of the Lyapunov equation , where is obtained from , and K, which are the so-called mass, damping, and stiffness matrices, respectively. These matrices are real, symmetric of order n, and . In addition, we assume that K is positive definite and is positive semidefinite, with and no internal damping.
Using the obtained formula, we propose a novel approach for very efficiently calculating the optimal damping matrix .
In contrast to the first part of the paper, which we refer to as the “theoretical part”, in the second part, we assumed that and (usually a small percentage of the critical damping). We refer to this part as the “numerical part” or “numerical point of view”.
In said part, we presented a novel linearization, i.e., a novel construction of the matrix A in the Lyapunov equation , and a novel optimization process. The proposed optimization process computes the optimal damping that minimizes a function , where Z is a chosen symmetric positive semidefinite matrix, using the approximation function for the trace function .
The results obtained in both parts were illustrated with several corresponding numerical examples.






{kind=link}
{kind=link}