
Swarm-Intelligence Optimization Method for Dynamic Optimization Problem


Abstract
:1. Introduction
- A universal swarm-intelligence dynamic optimization method is summarized and proposed, which lays a theoretical foundation for subsequent research on using the swarm-intelligence technique to solve dynamic optimization problems.
- A novel modified SSA is implemented from the application side and utilized to improve the efficiency and accuracy of typical dynamic optimization problems.
- Other well-known swarm-intelligence techniques for dynamic optimization are further investigated under a universal optimization framework.
2. Preliminaries
2.1. Dynamic Optimization Problem Description
2.2. CVP Strategy
2.3. Swarm-Intelligence Dynamic Optimization Method Based on CVP Strategy
- (1)
- Through the CVP strategy, is transformed into , and the dynamic optimization problem shown in Equation (1) is transformed into the static optimization problem form shown in Equation (3).
- (2)
- Set relevant parameters, such as population size, the maximum number of iterations, and algorithm parameters.
- (3)
- Initialize the population.
- (4)
- Evaluate and sort the fitness values of individuals in the population and record the current optimal value.
- (5)
- According to the evolution strategy of the algorithm, a new population is generated.
- (6)
- Compare the fitness value of the new solution and replace it if it is better than the current value.
- (7)
- Determine whether the current condition meets the stop criterion; if so, terminate the algorithm and output the optimal solution. Otherwise, return to (4) and continue to execute, and set t = t + 1.
3. Mathematical Models and Algorithms
3.1. Sparrow Search Algorithm
3.2. Multi-Strategy Improved Hybrid Swarm-Intelligence Optimization Algorithm
3.2.1. Good-Point Set Theory
3.2.2. Hybrid Algorithm Strategy
3.2.3. Stagnation Disturbance Strategy Based on Lévy Flight
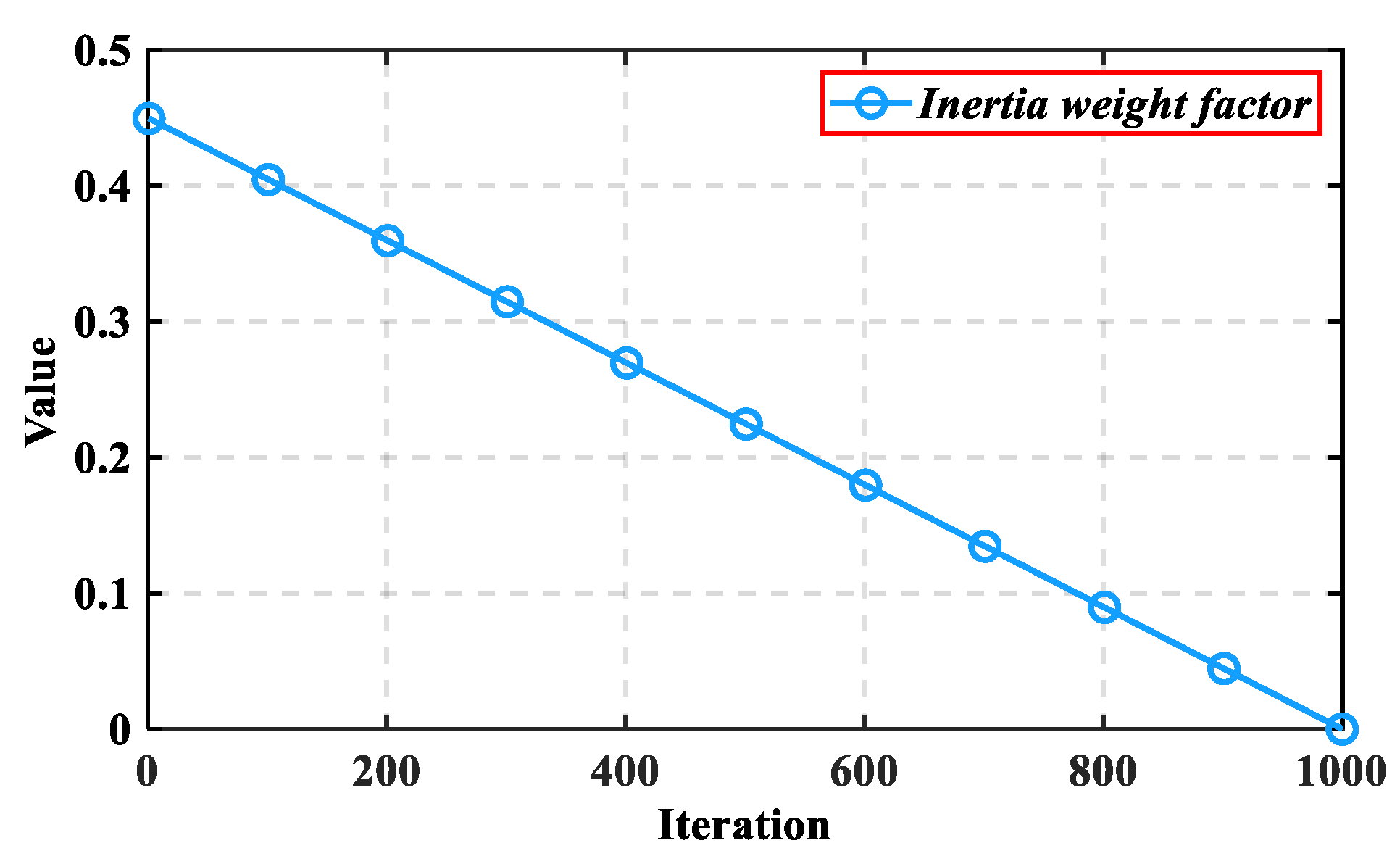
3.2.4. Early Warning Process Based on Student’s t-Distribution Mutation Factor
| Algorithm 1: The framework of CM-HSSA |
| Input: Max_Iter: the maximum iteration; N: the population size; PD: the proportion of producers; SD: the proportion of early warning sparrows; cs, ce: the inertia weight adjustment parameters. Output:Xbest: the optimal individual location; fg: the fitness value of the optimal individual. /* Initialization*/
/*Iterative search*/
/*Algorithm terminated*/
|
3.3. Benchmark Function Experiments
3.3.1. Parameter Settings
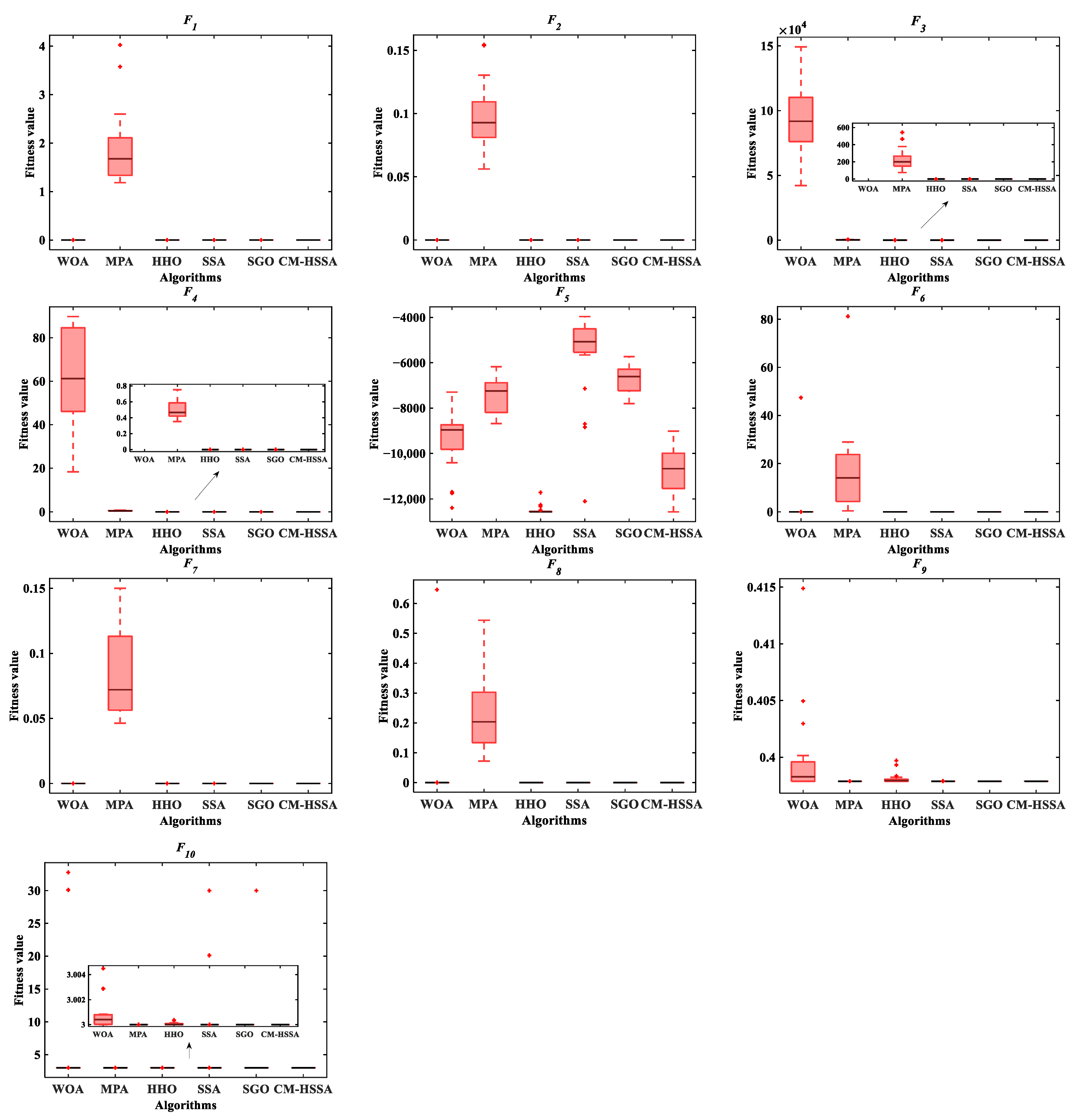
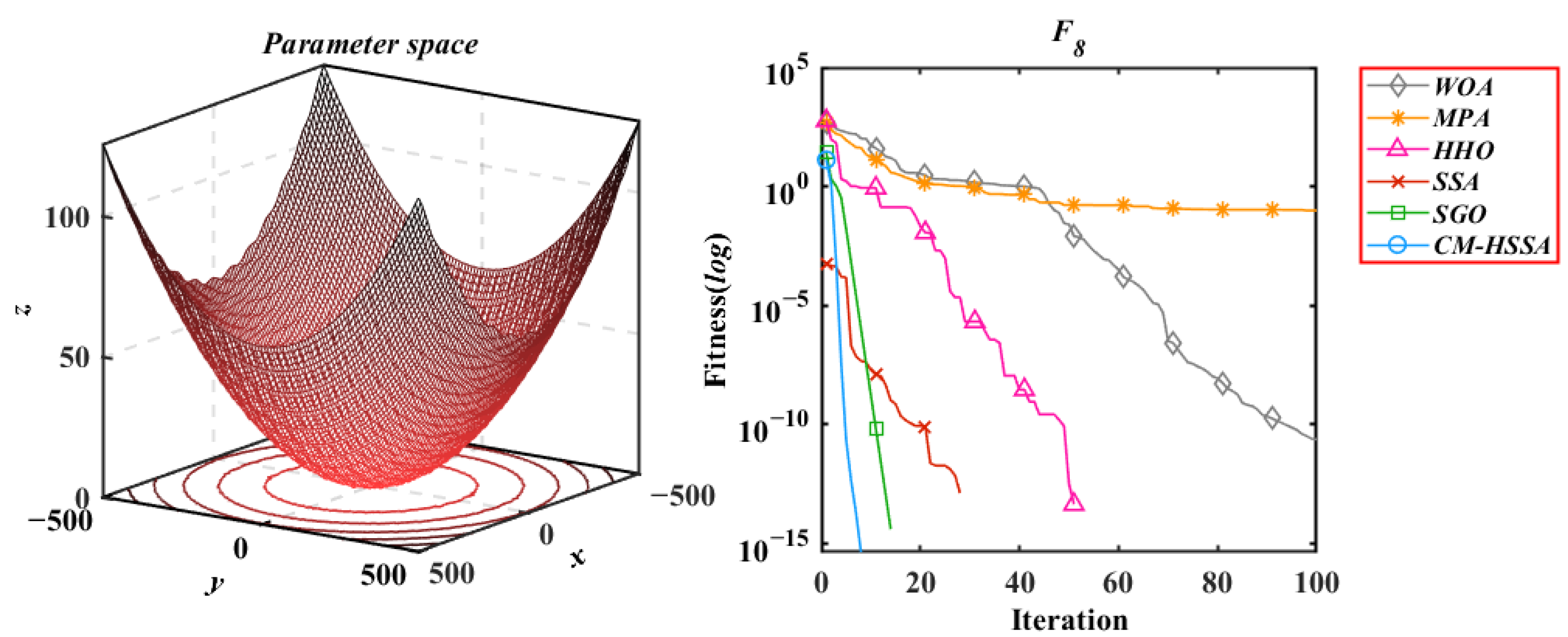
3.3.2. Statistical Result Comparison
4. Case Studies in Dynamic Optimization
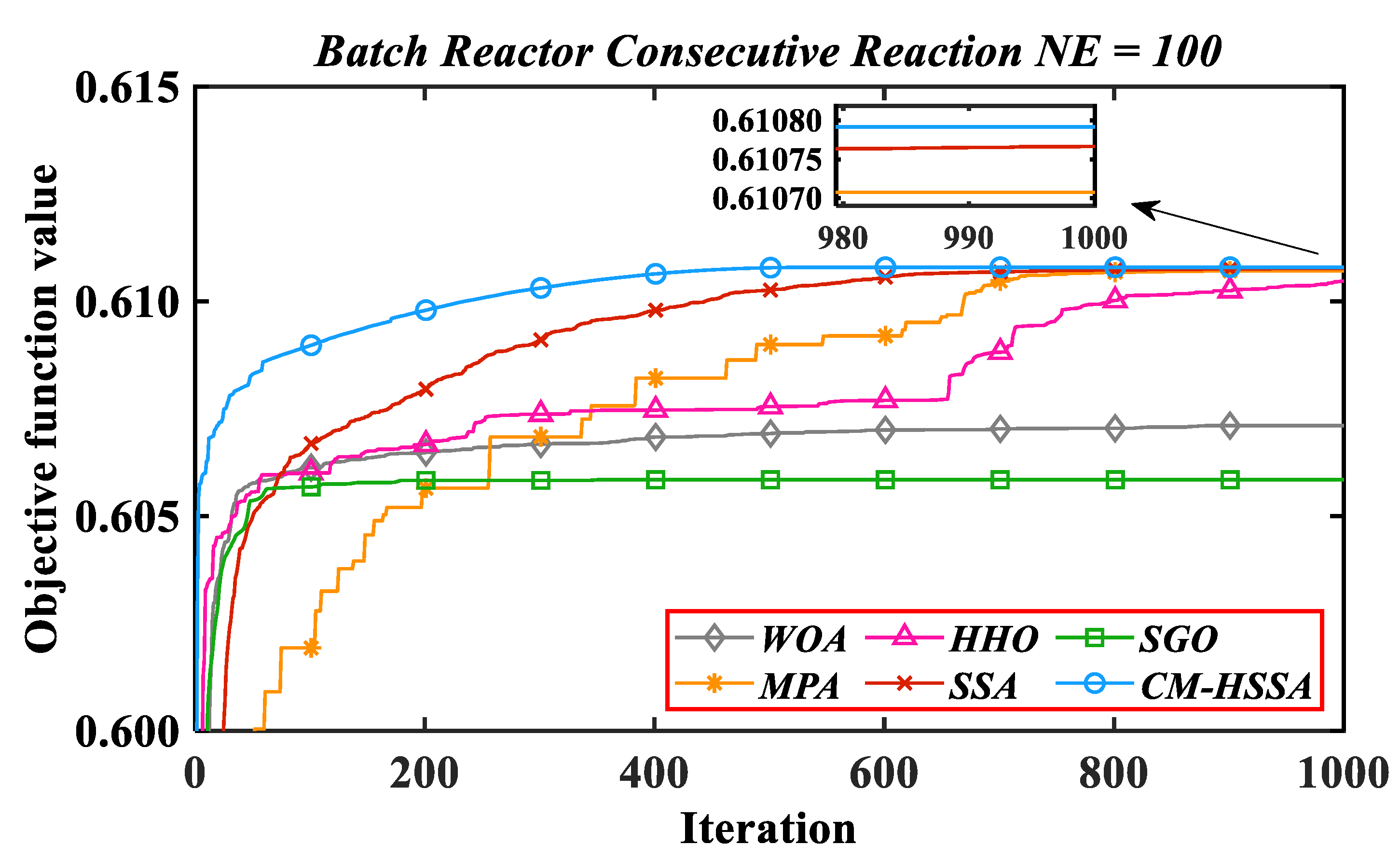
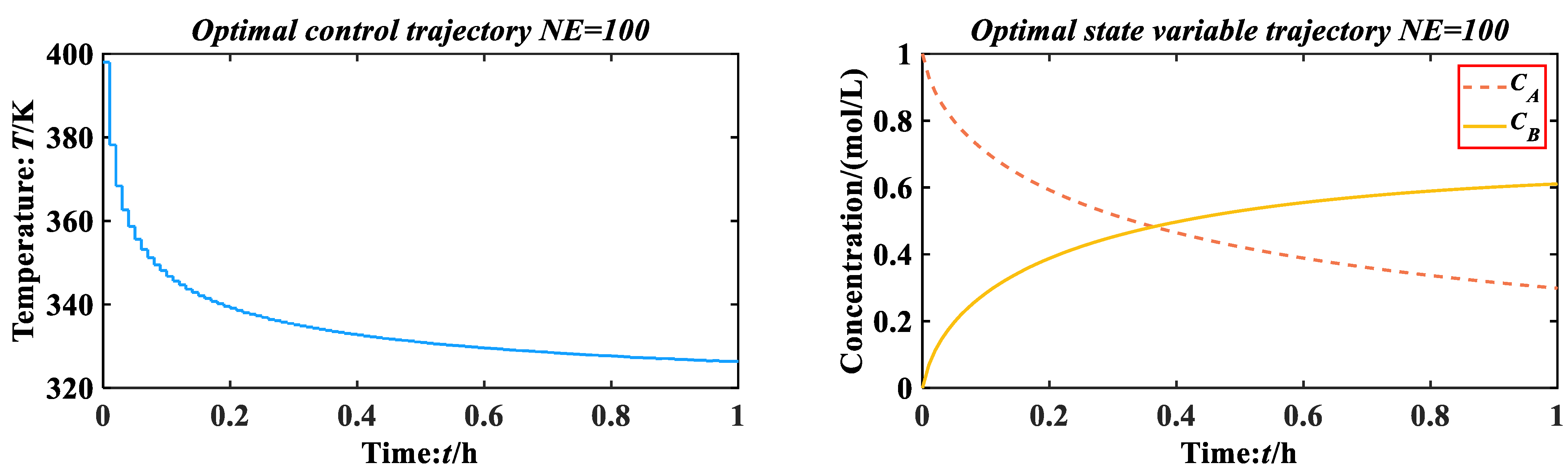
4.1. Problem 1: Batch Reactor Consecutive Reaction
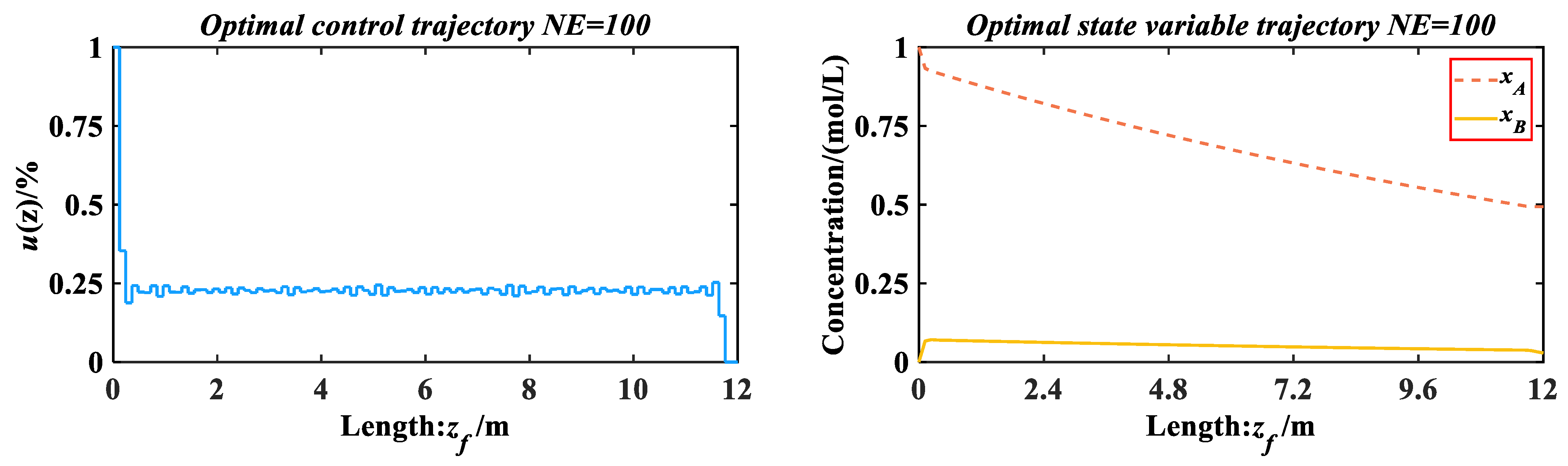
4.2. Problem 2: Catalyst Mixing Reaction in Tubular Reactor
4.3. Problem 3: Parallel Reactions in Tubular Reactor
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, B.; Chen, D.; Wu, X. Graded optimization strategy and its application to chemical dynamic optimization with fixed boundary. CIESC J. 2005, 56, 1276–1280. [Google Scholar]
- Mo, Y.; Chen, D. Chaos particle swarm optimization algorithm and its application in biochemical process dynamic optimization. CIESC J. 2006, 57, 2123–2127. [Google Scholar]
- Zhou, Y.; Liu, X. Control parameterization-based adaptive particle swarm approach for solving chemical dynamic optimization problems. Chem. Eng. Technol. 2014, 37, 692–702. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, M.; Liang, X. Improved Gauss pseudospectral method for solving a nonlinear optimal control problem with complex constraints. Acta Autom. Sin. 2013, 39, 672–678. [Google Scholar] [CrossRef]
- Chachuat, B.; Mitsos, A.; Barton, P.I. Optimal design and steady-state operation of micro power generation employing fuel cells. Chem. Eng. Sci. 2005, 60, 4535–4556. [Google Scholar] [CrossRef]
- Peng, H.; Gao, Q.; Wu, Z.; Zhong, W. A mixed variable variational method for optimal control problems with applications in aerospace control. Acta Autom. Sin. 2011, 37, 1248–1255. [Google Scholar]
- Pollard, G.P.; Sargent, R.W.H. Off line computation of optimum controls for a plate distillation column. Automatica 1970, 6, 59–76. [Google Scholar] [CrossRef]
- Schranz, M.; Di Caro, G.A.; Schmickl, T.; Elmenreich, W. Swarm intelligence and cyber-physical systems: Concepts, challenges and future trends. Swarm Evol. Comput. 2021, 60, 100762. [Google Scholar] [CrossRef]
- Hussain, K.; Mohd, M.N.; Cheng, S. Metaheuristic research: A comprehensive survey. Artif. Intell. Rev. 2019, 52, 2191–2233. [Google Scholar] [CrossRef] [Green Version]
- Bacanin, N.; Stoean, R.; Zivkovic, M.; Petrovic, A.; Rashid, T.A.; Bezdan, T. Performance of a novel chaotic firefly algorithm with enhanced exploration for tackling global optimization problems: Application for dropout regularization. Mathematics 2021, 9, 2705. [Google Scholar] [CrossRef]
- Malakar, S.; Ghosh, M.; Bhowmik, S.; Sarkar, R.; Nasipuri, M. A GA based hierarchical feature selection approach for handwritten word recognition. Neural Comput. Appl. 2020, 32, 2533–2552. [Google Scholar] [CrossRef]
- Shi, B.; Yin, Y.; Liu, F. Optimal control strategies combined with PSO and control vector parameterization for batchwise chemical process. CIESC J. 2019, 70, 979–986. [Google Scholar]
- Lyu, Y.; Mo, Y.; Lu, Y.; Liu, R. Enhanced Beetle Antennae Algorithm for Chemical Dynamic Optimization Problems’ Non-Fixed Points Discrete Solution. Processes 2022, 10, 148. [Google Scholar] [CrossRef]
- Asgari, S.A.; Pishvaie, M.R. Dynamic Optimization in Chemical Processes Using Region Reduction Strategy and Control Vector Parameterization with an Ant Colony Optimization Algorithm. Chem. Eng. Technol. Ind. Chem. Plant Equip. Process. Eng. Biotechnol. 2008, 31, 507–512. [Google Scholar] [CrossRef]
- Xu, L.; Mo, Y.; Lu, Y. Improved Seagull Optimization Algorithm Combined with an Unequal Division Method to Solve Dynamic Optimization Problems. Processes 2021, 9, 1037. [Google Scholar] [CrossRef]
- Zhang, Y.; Mo, Y. Dynamic optimization of chemical processes based on modified sailfish optimizer combined with an equal division method. Processes 2021, 9, 1806. [Google Scholar] [CrossRef]
- Liu, Z.; Du, W.L.; Qi, R. Dynamic optimization in chemical processes using improved knowledge-based cultural algorithm. CIESC J. 2010, 61, 2889–2895. [Google Scholar]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Satapathy, S.; Naik, A. Social group optimization (SGO): A new population evolutionary optimization technique. Complex Intell. Syst. 2016, 2, 173–203. [Google Scholar] [CrossRef] [Green Version]
- Fathy, A.; Alanazi, T.M.; Rezk, H.; Yousri, D. Optimal energy management of micro-grid using sparrow search algorithm. Energy Rep. 2022, 8, 758–773. [Google Scholar] [CrossRef]
- Zhang, Z.; Han, Y. Discrete sparrow search algorithm for symmetric traveling salesman problem. Appl. Soft Comput. 2022, 118, 108469. [Google Scholar] [CrossRef]
- Yan, S.; Yang, P.; Zhu, D. Improved Sparrow Search Algorithm Based on Iterative Local Search. Comput. Intell. Neurosci. 2021, 2021, 6860503. [Google Scholar] [CrossRef]
- Xiong, Q.; Zhang, X.; He, S. A Fractional-Order Chaotic Sparrow Search Algorithm for Enhancement of Long Distance Iris Image. Mathematics 2021, 9, 2790. [Google Scholar] [CrossRef]
- Zhang, C.; Ding, S. A stochastic configuration network based on chaotic sparrow search algorithm. Knowl. Based Syst. 2021, 220, 106924. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Liu, G.; Shu, C.; Liang, Z. A modified sparrow search algorithm with application in 3d route planning for UAV. Sensors 2021, 21, 1224. [Google Scholar] [CrossRef]
- Ma, J.; Hao, Z.; Sun, W. Enhancing sparrow search algorithm via multi-strategies for continuous optimization problems. Inf. Process. Manag. 2022, 59, 102854. [Google Scholar] [CrossRef]
- Shi, L.; Ding, X.; Li, M. Research on the capability maturity evaluation of intelligent manufacturing based on firefly algorithm, sparrow search algorithm, and BP neural network. Complexity 2021, 2021, 5554215. [Google Scholar] [CrossRef]
- Ouyang, C.; Qiu, Y.; Zhu, D. Adaptive spiral flying sparrow search algorithm. Sci. Program. 2021, 2021, 6505253. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Ngo, T.G.; Dao, T.K. Microgrid Operations Planning Based on Improving the Flying Sparrow Search Algorithm. Symmetry 2022, 14, 168. [Google Scholar] [CrossRef]
- Chen, X.; Tianfield, H.; Mei, C. Biogeography-based learning particle swarm optimization. Soft Comput. 2017, 21, 7519–7541. [Google Scholar] [CrossRef]
- Luyben, W.L. Optimum product recovery in chemical process design. Ind. Eng. Chem. Res. 2014, 53, 16044–16050. [Google Scholar] [CrossRef]
- Tavazoei, M.S.; Haeri, M. Comparison of different one-dimensional maps as chaotic search pattern in chaos optimization algorithms. Appl. Math. Comput. 2007, 187, 1076–1085. [Google Scholar] [CrossRef]
- Li, Y.; Han, M.; Guo, Q. Modified whale optimization algorithm based on tent chaotic mapping and its application in structural optimization. KSCE J. Civ. Eng. 2020, 24, 3703–3713. [Google Scholar] [CrossRef]
- Varol Altay, E.; Alatas, B. Bird swarm algorithms with chaotic mapping. Artif. Intell. Rev. 2020, 53, 1373–1414. [Google Scholar] [CrossRef]
- Han, X.H.; Xiong, X.; Duan, F. A new method for image segmentation based on BP neural network and gravitational search algorithm enhanced by cat chaotic mapping. Appl. Intell. 2015, 43, 855–873. [Google Scholar] [CrossRef]
- Sayed, G.I.; Tharwat, A.; Hassanien, A.E. Chaotic dragonfly algorithm: An improved metaheuristic algorithm for feature selection. Appl. Intell. 2019, 49, 188–205. [Google Scholar] [CrossRef]
- Koyuncu, H. GM-CPSO: A new viewpoint to chaotic particle swarm optimization via Gauss map. Neural Process. Lett. 2020, 52, 241–266. [Google Scholar] [CrossRef]
- Yuan, J.; Liu, Z.; Lian, Y. Global Optimization of UAV Area Coverage Path Planning Based on Good Point Set and Genetic Algorithm. Aerospace 2022, 9, 86. [Google Scholar] [CrossRef]
- Tang, Y.; Wang, Z.; Fang, J. Feedback learning particle swarm optimization. Appl. Soft Comput. 2011, 11, 4713–4725. [Google Scholar] [CrossRef] [Green Version]
- Brockmann, D.; Hufnagel, L.; Geisel, T. The scaling laws of human travel. Nature 2006, 439, 462–465. [Google Scholar] [CrossRef]
- Mantegna, R.N. Fast, accurate algorithm for numerical simulation of Levy stable stochastic processes. Phys. Rev. E 1994, 49, 4677. [Google Scholar] [CrossRef]
- Mirjalili, S. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2016, 27, 1053–1073. [Google Scholar] [CrossRef]
- Derrac, J.; García, S.; Molina, D. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]
- Rajesh, J.; Gupta, K.; Kusumakar, H.S. Dynamic optimization of chemical processes using ant colony framework. Comput. Chem. 2001, 25, 583–595. [Google Scholar] [CrossRef]
- Renfro, J.G.; Morshedi, A.M.; Asbjornsen, O.A. Simultaneous optimization and solution of systems described by differential/algebraic equations. Comput. Chem. Eng. 1987, 11, 503–517. [Google Scholar] [CrossRef]
- Logsdon, J.S.; Biegler, L.T. A relaxed reduced space SQP strategy for dynamic optimization problems. Comput. Chem. Eng. 1993, 17, 367–372. [Google Scholar] [CrossRef]
- Dadebo, S.A.; McAuley, K.B. Dynamic optimization of constrained chemical engineering problems using dynamic programming. Comput. Chem. Eng. 1995, 19, 513–525. [Google Scholar] [CrossRef]
- Peng, X.; Qi, R.; Du, W.; Qian, F. An improved knowledge evolution algorithm and its application to chemical process dynamic optimization. CIESC J. 2012, 63, 841–850. [Google Scholar]
- Sun, F.; Du, W.; Qi, R. A hybrid improved genetic algorithm and its application in dynamic optimization problems of chemical processes. Chin. J. Chem. Eng. 2013, 21, 144–154. [Google Scholar] [CrossRef]
- Gunn, D.J.; Thomas, W.J. Mass transport and chemical reaction in multifunctional catalyst systems. Chem. Eng. Sci. 1965, 20, 89–100. [Google Scholar] [CrossRef]
- Liu, X.; Chen, L.; Hu, Y. Solution of chemical dynamic optimization using the simultaneous strategies. Chin. J. Chem. Eng. 2013, 21, 55–63. [Google Scholar] [CrossRef]
- Biegler, L.T. Solution of dynamic optimization problems by successive quadratic programming and orthogonal collocation. Comput. Chem. Eng. 1984, 8, 243–247. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Benchmark Function | Formula | Range | Opt |
|---|---|---|---|
| Sphere Model | [−100, 100] | 0 | |
| Schwefel’s problem 2.22 | [−10, 10] | 0 | |
| Schwefel’s problem 1.2 | [−100, 100] | 0 | |
| Schwefel’s problem 2.21 | [−100, 100] | 0 | |
| Generalized Schwefel’s problem 2.26 | [−500, 500] | −4.18.9829D | |
| Generalized Rastrigin’s Function | [−5.12, 5.12] | 0 | |
| Ackley’s Function | [−32, 32] | 0 | |
| Generalized Griewank Function | [−600, 600] | 0 | |
| Branin Function | [−5, 5] | 0.398 | |
| Goldstein–Price Function | [−2, 2] | 3 |
| Function | Result | WOA | MPA | HHO | SSA | SGO | CM-HSSA |
|---|---|---|---|---|---|---|---|
| Mean | 3.5706 × 10−10 | 1.9437 | 1.3052 × 10−20 | 2.9595 × 10−33 | 4.3773 × 10−135 | 0 | |
| Std. | 7.1180 × 10−10 | 1.0336 | 5.8268 × 10−20 | 1.3235 × 10−33 | 2.9367 × 10−136 | 0 | |
| TIC/TOC | 0.075297 | 0.260806 | 0.122167 | 0.098561 | 0.121907 | 0.102957 | |
| Mean | 9.7066 × 10−9 | 9.6357 × 10−2 | 4.3809 × 10−13 | 2.0208 × 10−21 | 1.5103 × 10−68 | 0 | |
| Std. | 2.1815 × 10−8 | 3.3799 × 10−2 | 1.0991 × 10−12 | 8.9306 × 10−21 | 1.6423 × 10−69 | 0 | |
| TIC/TOC | 0.060907 | 0.197253 | 0.121605 | 0.090216 | 0.127647 | 0.096940 | |
| Mean | 9.8067 × 104 | 2.1566 × 102 | 1.8472 × 10−13 | 4.1637 × 10−33 | 2.2632 × 10−135 | 0 | |
| Std. | 2.8622 × 104 | 1.8756 × 102 | 8.2479 × 10−13 | 1.8621 × 10−32 | 9.9703 × 10−136 | 0 | |
| TIC/TOC | 0.098011 | 0.306055 | 0.232791 | 0.116329 | 0.246341 | 0.148943 | |
| Mean | 5.6341 × 101 | 4.5856 × 10−1 | 3.6428 × 10−13 | 3.9747 × 10−21 | 1.0950 × 10−68 | 0 | |
| Std. | 2.8796 × 101 | 1.0924 × 10−1 | 6.1075 × 10−13 | 1.7745 × 10−20 | 5.3688 × 10−70 | 0 | |
| TIC/TOC | 0.060370 | 0.203315 | 0.113611 | 0.106351 | 0.126110 | 0.117772 | |
| Mean | −8.6688 × 103 | −7.2695 × 103 | −1.2356 × 104 | −6.2868 × 103 | −6.9435 × 103 | −1.06 × 104 | |
| Std. | 1.0522 × 103 | 4.7419 × 102 | 7.9240 × 102 | 1.6650 × 103 | 6.5873 × 102 | 7.8299 × 102 | |
| TIC/TOC | 0.067170 | 0.251228 | 0.157786 | 0.079425 | 0.111361 | 0.098025 | |
| Mean | 1.2998 × 10−8 | 8.6017 | 0 | 0 | 0 | 0 | |
| Std. | 5.3053 × 10−8 | 7.2342 | 0 | 0 | 0 | 0 | |
| TIC/TOC | 0.060027 | 0.217248 | 0.177083 | 0.076583 | 0.130681 | 0.106733 | |
| Mean | 3.7669 × 10−7 | 8.9223 × 10−2 | 7.3576 × 10−12 | 1.0658 × 10−15 | 8.8818 × 10−16 | 8.8818 × 10−16 | |
| Std. | 5.5884 × 10−7 | 2.8663 × 10−2 | 2.2196 × 10−12 | 7.9441 × 10−16 | 0 | 0 | |
| TIC/TOC | 0.071849 | 0.177886 | 0.127309 | 0.079305 | 0.122893 | 0.098612 | |
| Mean | 9.1942 × 10−1 | 2.7695 × 10−1 | 0 | 0 | 0 | 0 | |
| Std. | 2.8307 × 10−1 | 1.4355 × 10−1 | 0 | 0 | 0 | 0 | |
| TIC/TOC | 0.073628 | 0.198219 | 0.159379 | 0.077422 | 0.131028 | 0.115157 | |
| Mean | 4.0011 × 10−1 | 3.9789 × 10−1 | 3.9853 × 10−1 | 3.9789 × 10−1 | 3.9789 × 10−1 | 3.9789 × 10−1 | |
| Std. | 3.7678 × 10−3 | 5.0943 × 10−11 | 1.1419 × 10−3 | 6.3089 × 10−7 | 2.3781 × 10−8 | 0 | |
| TIC/TOC | 0.051275 | 0.173310 | 0.137616 | 0.098129 | 0.096289 | 0.083473 | |
| Mean | 8.4292 | 3.0201 | 3.0231 | 3.0023 | 3.0001 | 3.0000 | |
| Std. | 1.1139 × 101 | 1.8833 × 10−10 | 1.4497 × 10−4 | 2.7527 × 10−7 | 1.9782 × 10−7 | 2.2017 × 10−15 | |
| TIC/TOC | 0.056070 | 0.183948 | 0.155738 | 0.071500 | 0.107347 | 0.081171 |
| Function | CM-HSSA vs. WOA | CM-HSSA vs. MPA | CM-HSSA vs. HHO | CM-HSSA vs. SSA | CM-HSSA vs. SGO |
|---|---|---|---|---|---|
| 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | |
| 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | |
| 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | 2.992 × 10−8 | 8.0065 × 10−9 | |
| 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | 8.0065 × 10−9 | |
| 2.6609 × 10−6 | 6.7004 × 10−8 | 6.1833 × 10−4 | 6.8341 × 10−7 | 6.7004 × 10−8 | |
| 2.9868 × 10−8 | 8.0065 × 10−9 | N/A | N/A | N/A | |
| 8.0065 × 10−9 | 8.0065 × 10−9 | 1.0433 × 10−7 | 3.4211 × 10−4 | N/A | |
| 8.0065 × 10−9 | 8.0065 × 10−9 | N/A | N/A | N/A | |
| 1.1597 × 10−4 | 6.7956 × 10−8 | 1.0581 × 10−4 | 8.0065 × 10−9 | 5.0209 × 10−5 | |
| 8.0065 × 10−9 | 8.0065 × 10−9 | 2.1025 × 10−7 | 4.0137 × 10−8 | 1.9299 × 10−3 |
| Method | Mean | Std. | TIC/TOC |
|---|---|---|---|
| WOA | 0.60718532 | 5.9120 × 10−4 | 359.5657 |
| MPA | 0.61070726 | 7.8608 × 10−4 | 344.6441 |
| HHO | 0.61047035 | 1.9521 × 10−3 | 1092.0483 |
| SSA | 0.61077333 | 2.4912 × 10−7 | 351.2811 |
| SGO | 0.60584429 | 9.7315 × 10−4 | 767.8168 |
| CM-HSSA | 0.61079200 | 2.9799 × 10−7 | 347.2429 |
| Method | NE | J/(mol/L) |
|---|---|---|
| OC [50] | - | 0.61 |
| SQP [51] | 80 | 0.610775 |
| IDP [52] | 80 | 0.610775 |
| PSO-CVP [12] | - | 0.6105359 |
| IKEA [53] | 10 | 0.6101 |
| 20 | 0.610426 | |
| 100 | 0.610781–0.610789 | |
| HIGA [54] | 10 | 0.61007 |
| 20 | 0.61046 | |
| IKBCA [17] | 10 | 0.6101 |
| 20 | 0.610454 | |
| 100 | 0.610779–0.610787 | |
| EBSO [13] | 10 | 0.610558922 |
| 20 | 0.61064758 | |
| 80 | 0.61078114 | |
| MSFO [16] | 50 | 0.610771–0.610785 |
| ISOA [15] | 30 | 0.61059223 |
| CVP-PSO [3] | - | 0.6107847 |
| CVP-APSO [3] | - | 0.6107850 |
| This work (CM-HSSA) | 100 | 0.61079200 |
| Method | Mean | Std. | TIC/TOC |
|---|---|---|---|
| WOA | 0.47625678 | 5.8233 × 10−4 | 426.7259 |
| MPA | 0.47742011 | 6.4257 × 10−4 | 1034.2457 |
| HHO | 0.47478338 | 1.7305 × 10−3 | 1213.1210 |
| SSA | 0.47744034 | 9.2403 × 10−4 | 503.7366 |
| SGO | 0.47530289 | 3.8821 × 10−4 | 1161.0388 |
| CM-HSSA | 0.47770179 | 2.7368 × 10−5 | 457.1058 |
| Methods | NE | J/(mol/L) |
|---|---|---|
| IDP [52] | 20 | 0.47527 |
| 40 | 0.47695 | |
| ACO [14] | - | 0.47615 |
| IKEA [53] | 10 | 0.475 |
| 20 | 0.4757 | |
| 100 | 0.47761–0.47768 | |
| IKBCA [17] | 20 | 0.4753 |
| 100 | 0.47768–0.47770 | |
| EBSO [13] | 10 | 0.47502183 |
| 20 | 0.47627191 | |
| 40 | 0.47697288 | |
| MSFO [16] | 20 | 0.47562 |
| 70 | 0.477544–0.47760 | |
| ISOA [15] | 40 | 0.47721 |
| This work (CM-HSSA) | 100 | 0.47770179 |
| Method | Mean | Std. | TIC/TOC |
|---|---|---|---|
| WOA | 0.56836465 | 1.4475 × 10−3 | 364.3671 |
| MPA | 0.57349880 | 1.0338 × 10−3 | 381.3942 |
| HHO | 0.57152795 | 2.9227 × 10−3 | 1062.2493 |
| SSA | 0.57269740 | 8.7921 × 10−3 | 349.0882 |
| SGO | 0.55138595 | 3.5277 × 10−4 | 685.3328 |
| CM-HSSA | 0.57355371 | 4.2218 × 10−6 | 376.5377 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Mo, Y.; Lu, Y.; Lyu, Y.; Zhang, Y.; Guo, H. Swarm-Intelligence Optimization Method for Dynamic Optimization Problem. Mathematics 2022, 10, 1803. https://doi.org/10.3390/math10111803
Liu R, Mo Y, Lu Y, Lyu Y, Zhang Y, Guo H. Swarm-Intelligence Optimization Method for Dynamic Optimization Problem. Mathematics. 2022; 10(11):1803. https://doi.org/10.3390/math10111803
Chicago/Turabian StyleLiu, Rui, Yuanbin Mo, Yanyue Lu, Yucheng Lyu, Yuedong Zhang, and Haidong Guo. 2022. "Swarm-Intelligence Optimization Method for Dynamic Optimization Problem" Mathematics 10, no. 11: 1803. https://doi.org/10.3390/math10111803