

GDAL and PROJ Libraries Integrated with GRASS GIS for Terrain Modelling of the Georeferenced Raster Image


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background
1.2. Objectives and Motivation
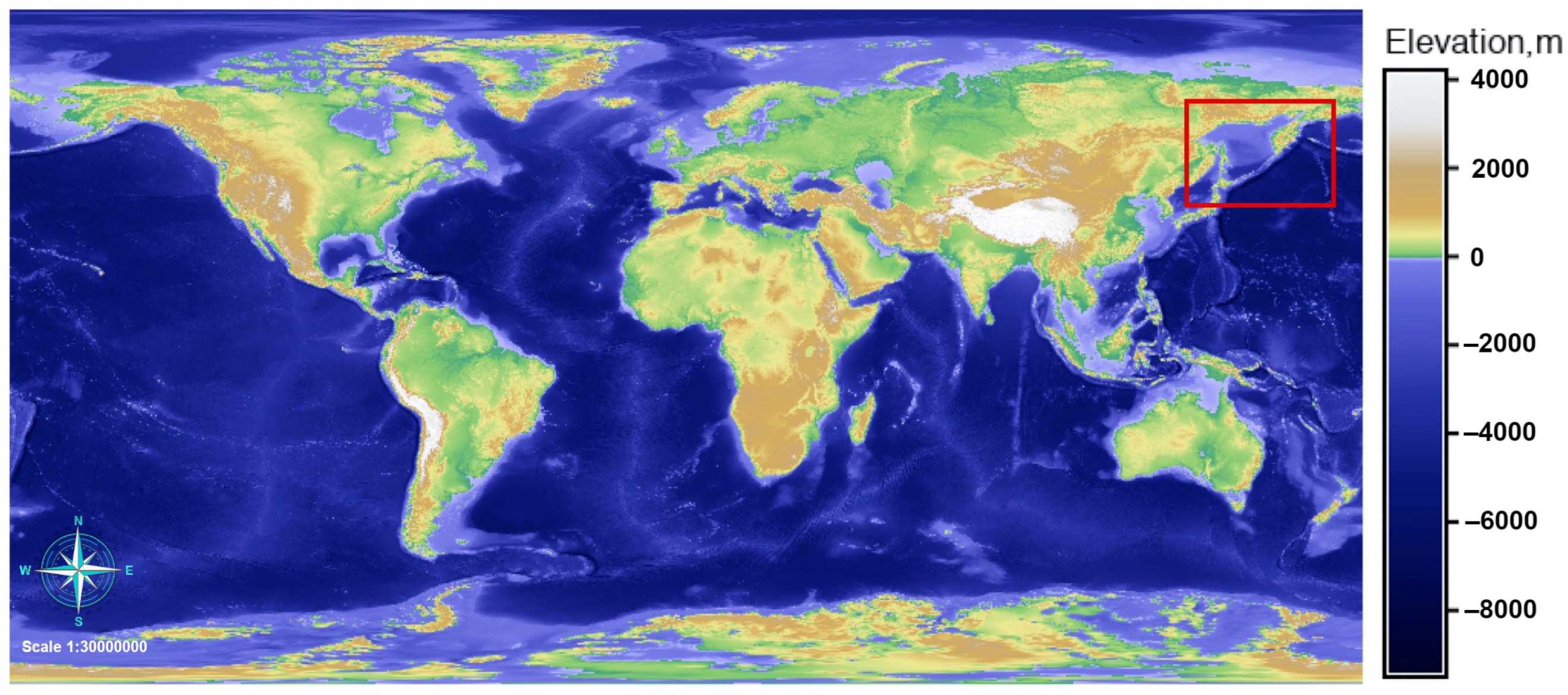
2. Case Study
3. Materials and Methods
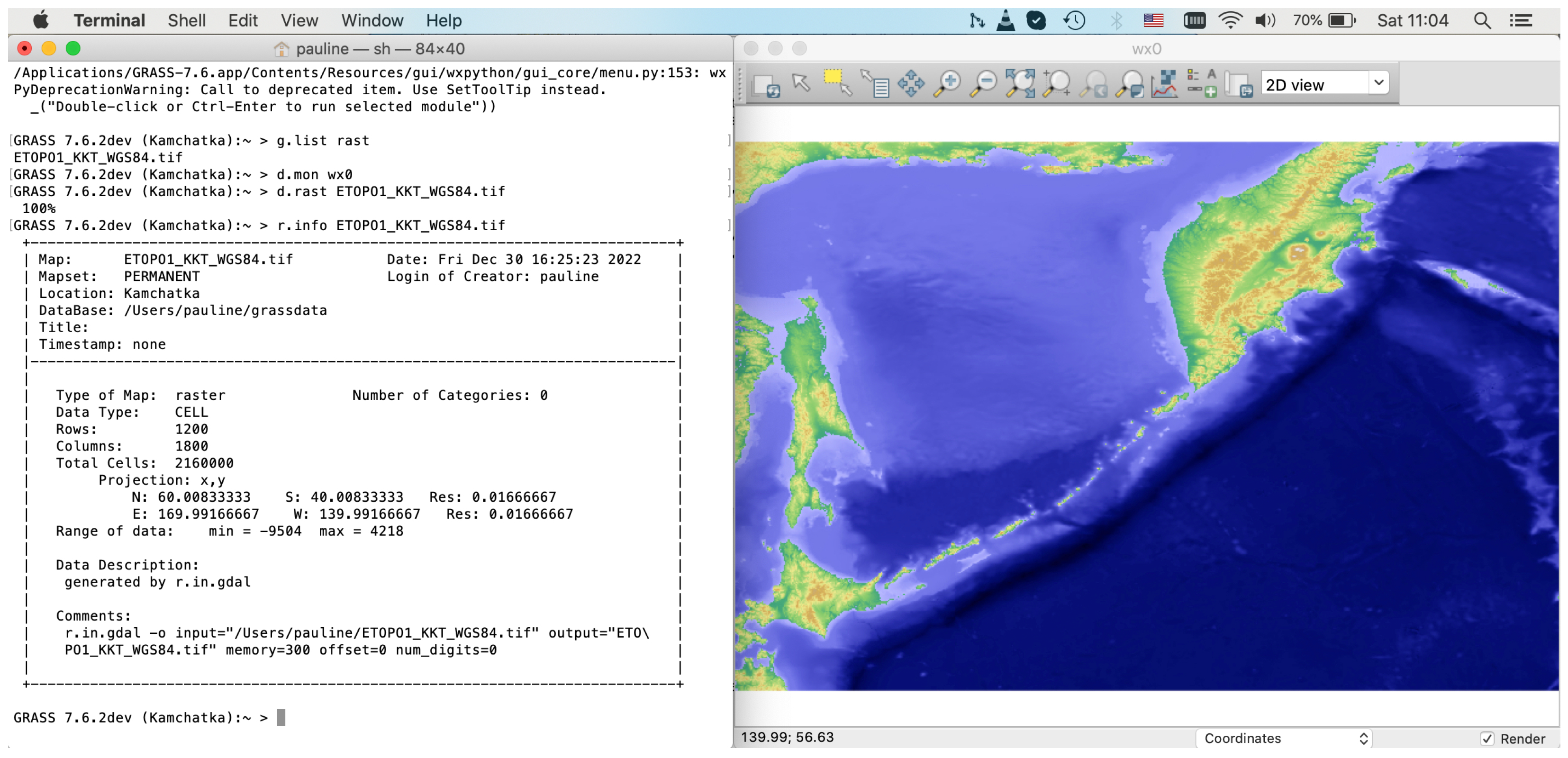
3.1. Data Capture and Organisation
| Listing 1. GRASS GIS script for mapping ETOPO1 raster file. |
| 1 #!/bin/sh |
| 2 # raster file imported to the Location folder ‘Kamchatka’ |
| 3 r.in.gdal -o input = /Users/pauline/ETOPO1_KKT_WGS84.tif output = ETOPO1_KKT_WGS84.tif |
| 4 # checked up the list of the raster files in the working directory |
| 5 g.list rast |
| 6 #starting graphical display (or ‘monitor’) in which the maps were displayed |
| 7 d.mon wx0 |
| 8 # visualizing raster by d.rast utility which displays grid cell maps in the current graphics region |
| 9 d.rast ETOPO1_Bed_g_geotiff |
| 10 # changing color palette, from default viridis to srtm_plus |
| 11 r.colors ETOPO1_KKT_WGS84 col = srtm_plus |
| 12 # check of the range of the elevation values (depths/heights) of the map |
| 13 r.info ETOPO1_KKT_WGS84 |
| 14 # display a legend on a map |
| 15 d.rast.leg map = ETOPO1_KKT_WGS84 |
| 16 # providing numerical output of category numbers or range of values in a raster |
| 17 r.describe ETOPO1_KKT_WGS84 |
| 18 # print a list of category numbers and associated labels |
| 19 r.cats |
| 20 # check up and print the current region extent (in this case: NS: 20.000000; EW: 45.000000). |
| 21 g.region -e |
| 22 # Removing auxiliary files |
| 23 g.remove type = raster name = ETOPO1_KKT_WGS84.tiff -f |
3.2. Data Processing by GDAL
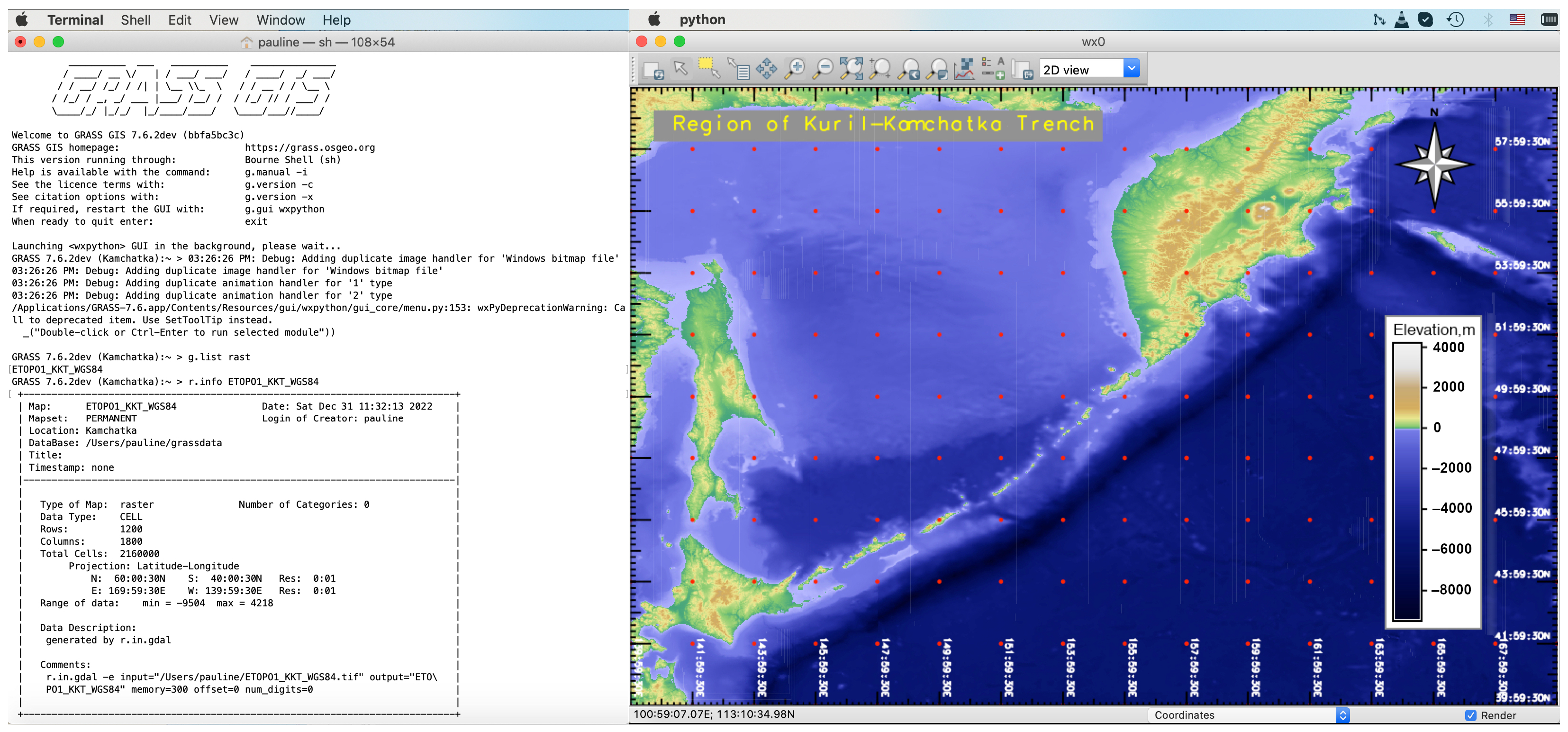
| Listing 2. GRASS GIS script for adding cartographic elements. |
| 1 #!/bin/sh |
| 2 g.region rast = ETOPO1_KKT_WGS84.tif -p |
| 3 d.mon wx0 |
| 4 d.rast ETOPO1_KKT_WGS84 |
| 5 r.colors ETOPO1_KKT_WGS84 col = srtm_plus |
| 6 d.legend raster = ETOPO1_KKT_WGS84 title = Elevation, m title_fontsize = 12 |
| 7 font = Helvetica fontsize = 8 -t -b bgcolor = white label_step = 2000 border_color = gray -f thin = 10 |
| 8 d.northarrow style = fancy_compass rotation = 0 label = N -w color = black fill_color = gray fontsize = 10 |
| 9 d.grid size = 02:00:00 -a -d color = red width = 0.1 fontsize = 8 text_color = white |
| 10 d.text text = "Region of Kuril–Kamchatka Trench" color = yellow bgcolor = gray size = 8 |
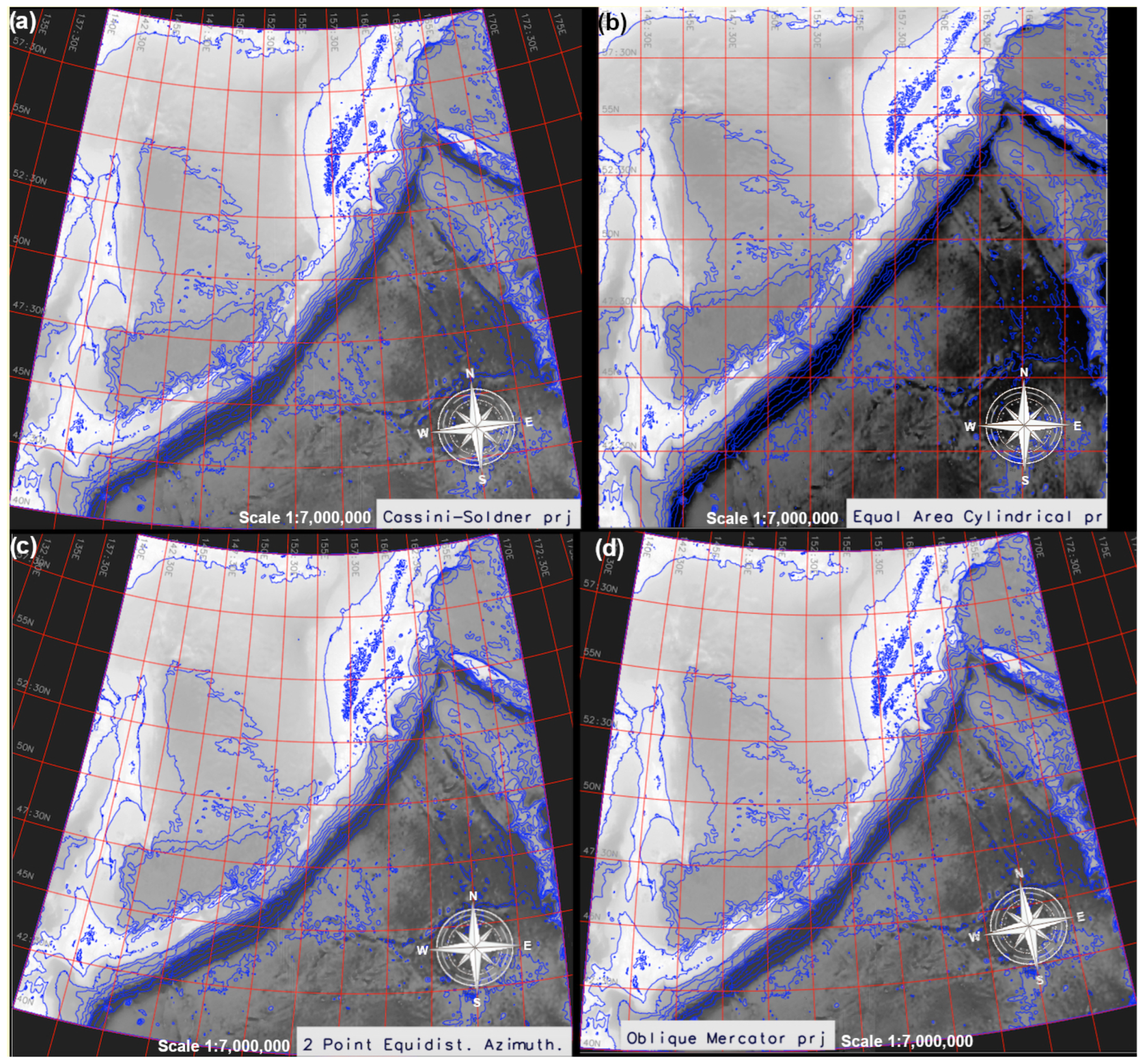
| Listing 3. GRASS GIS script for plotting two-point equidistant azimuthal projection. |
| 1 # stored in GeoTIFF in WGS84 warped to a Two-Point Equidistant Azimuthal projection: |
| 2 gdalwarp -t_srs ’+proj = tpeqd +lat_1 = 45 +lat_2 = 55 +lon_1 = 100 +lon_2 = 120’ ETOPO1_KKT_WGS84.tif ETOPO1_KKT_2p.tif -overwrite |
| 3 #!/bin/sh |
| 4 g.list rast |
| 5 r.info ETOPO1_KKT_2p |
| 6 d.mon wx0 |
| 7 g.region raster = ETOPO1_KKT_2p -p |
| 8 r.colors ETOPO1_KKT_2p col = grey.eq |
| 9 d.rast ETOPO1_KKT_2p |
| 10 d.redraw |
| 11 r.contour ETOPO1_KKT_2p out = Bathymetry1000 step = 1000 |
| 12 d.vect Bathymetry1000 color = ‘blue’ width = 0 |
| 13 d.grid -g size = 2.5 color = ‘255:0:0’ |
| 14 d.text text = "2 Point Equidist. Azimuth." color = ‘0:0:51’ bgcolor = ‘224:224:224’ size = 3 |
| Listing 4. GRASS GIS script for plotting map in Cassini–Soldner projection. |
| 1 # stored in GeoTIFF in WGS84 warped to an Cassini (Cassini–Soldner) equirectangular projection: |
| 2 gdalwarp -t_srs ’+proj = cass lat_0 = 50 lon_0 = 155’ ETOPO1_KKT_WGS84.tif ETOPO1_KKT_C.tif |
| 3 #!/bin/sh |
| 4 g.list rast |
| 5 r.info ETOPO1_KKT_C |
| 6 d.mon wx0 |
| 7 g.region raster = ETOPO1_KKT_C -p |
| 8 r.colors ETOPO1_KKT_C col = grey.eq |
| 9 d.rast ETOPO1_KKT_C |
| 10 d.redraw |
| 11 r.contour ETOPO1_KKT_C out = Bathymetry1000C step = 1000 |
| 12 d.vect Bathymetry1000C color = ‘blue’ width = 0 |
| 13 d.grid -g size = 2.5 color = ‘255:0:0’ |
| 14 d.text text = "Cassini–Soldner prj" color = ‘0:0:51’ bgcolor = ‘224:224:224’ size = 3 |
| Listing 5. GRASS GIS script for plotting map in oblique Mercator projection. |
| 1 # stored in GeoTIFF in WGS84 warped to a Oblique Mercator projection: |
| 2 gdalwarp -t_srs ’+proj = omerc +lat_1 = 45 +lat_2 = 55 lon_1 = 177 lon_2 = 210 +ellps = GRS80’ ETOPO1_KKT_WGS84.tif ETOPO1_KKT_OM.tif -overwrite |
| 3 #!/bin/sh |
| 4 g.list rast |
| 5 r.info ETOPO1_KKT_OM |
| 6 d.mon wx0 |
| 7 g.region raster = ETOPO1_KKT_OM -p |
| 8 r.colors ETOPO1_KKT_OM col = grey.eq |
| 9 d.rast ETOPO1_KKT_OM |
| 10 r.contour ETOPO1_KKT_OM out = Bathymetry1000OM step = 1000 |
| 11 d.vect Bathymetry1000OM color = ‘blue’ width = 0 |
| 12 d.grid -g size = 2.5 color = ‘255:0:0’ |
| 13 d.text text = "Oblique Mercator prj" color = ‘0:0:51’ bgcolor = ‘224:224:224’ size = 3 |
| Listing 6. GRASS GIS script for plotting map in Equal-Area Cylindrical projection. |
| 1 # stored in GeoTIFF in WGS84 warped to an Equal Area Cylindrical projection: |
| 2 gdalwarp -t_srs ’+proj = cea lat_ts = 50 lon_0 = 155’ ETOPO1_KKT_WGS84.tif ETOPO1_KKT_EAC.tif |
| 3 #!/bin/sh |
| 4 g.list rast |
| 5 r.info ETOPO1_KKT_EAC |
| 6 d.mon wx0 |
| 7 g.region raster = ETOPO1_KKT_EAC -p |
| 8 r.colors ETOPO1_KKT_EAC col = grey.eq |
| 9 d.rast ETOPO1_KKT_EAC |
| 10 d.redraw |
| 11 r.contour ETOPO1_KKT_EAC out = Bathymetry1000 step = 1000 |
| 12 d.vect Bathymetry1000 color = ‘blue’ width = 0 |
| 13 d.grid -g size = 2.5 color = ‘255:0:0’ |
| 14 d.text text = "Equal Area Cylindrical prj" color = ‘0:0:51’ bgcolor = ‘224:224:224’ size = 3 |
3.3. Displaying Raster Grids in GRASS GIS
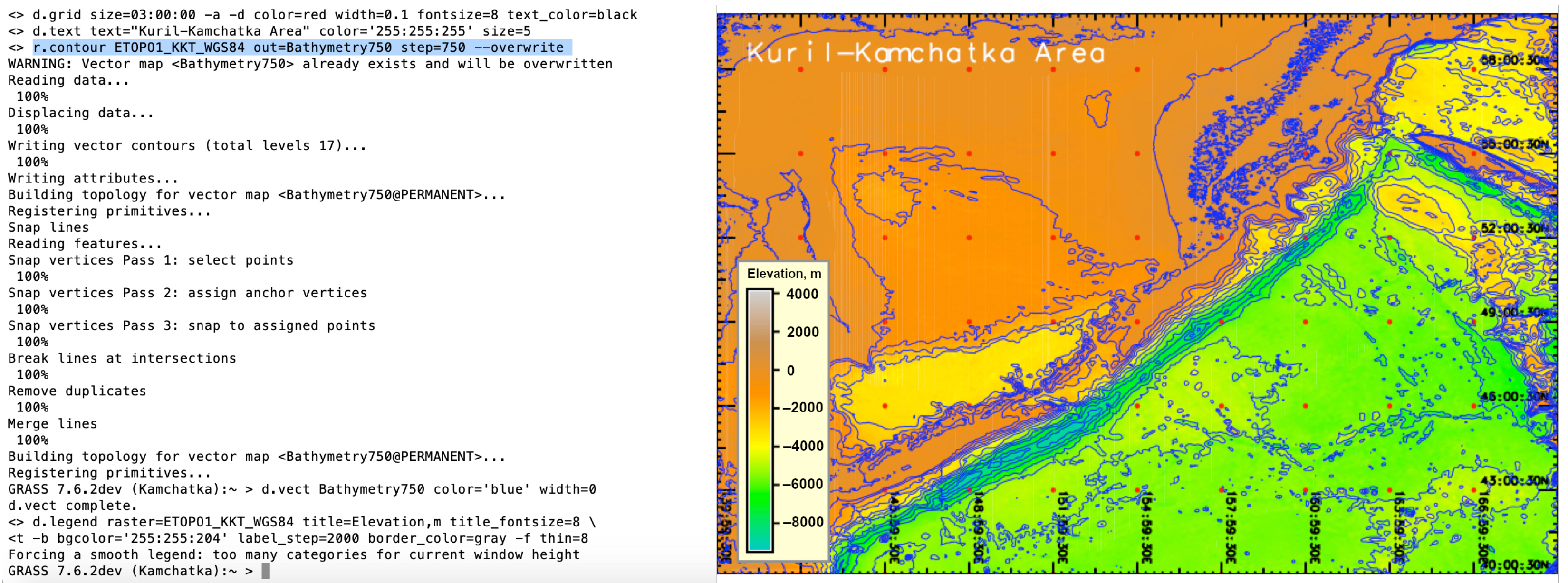
| Listing 7. GRASS GIS script for visualising raster grid and adding contour isolines. |
| 1 #!/bin/sh |
| 2 d.mon wx0 |
| 3 r.info ETOPO1_KKT_WGS84 |
| 4 g.region raster = ETOPO1_KKT_WGS84 -p |
| 5 d.rast ETOPO1_KKT_WGS84 |
| 6 d.grid size = 03:00:00 -a -d color = red width = 0.1 fontsize = 8 text_color = white |
| 7 d.text text = "Kuril–Kamchatka Area" color = ‘255:255:255’ size = 5 |
| 8 r.contour ETOPO1_KKT_WGS84 out = Bathymetry750 step = 750 –overwrite |
| 9 d.vect Bathymetry750 color = ‘102:37:4’ width = 0 |
3.4. Calculating Morphometric Parameters
4. Results and Discussion
4.1. Cartographic Projections by PROJ
4.2. Morphometric Parameters
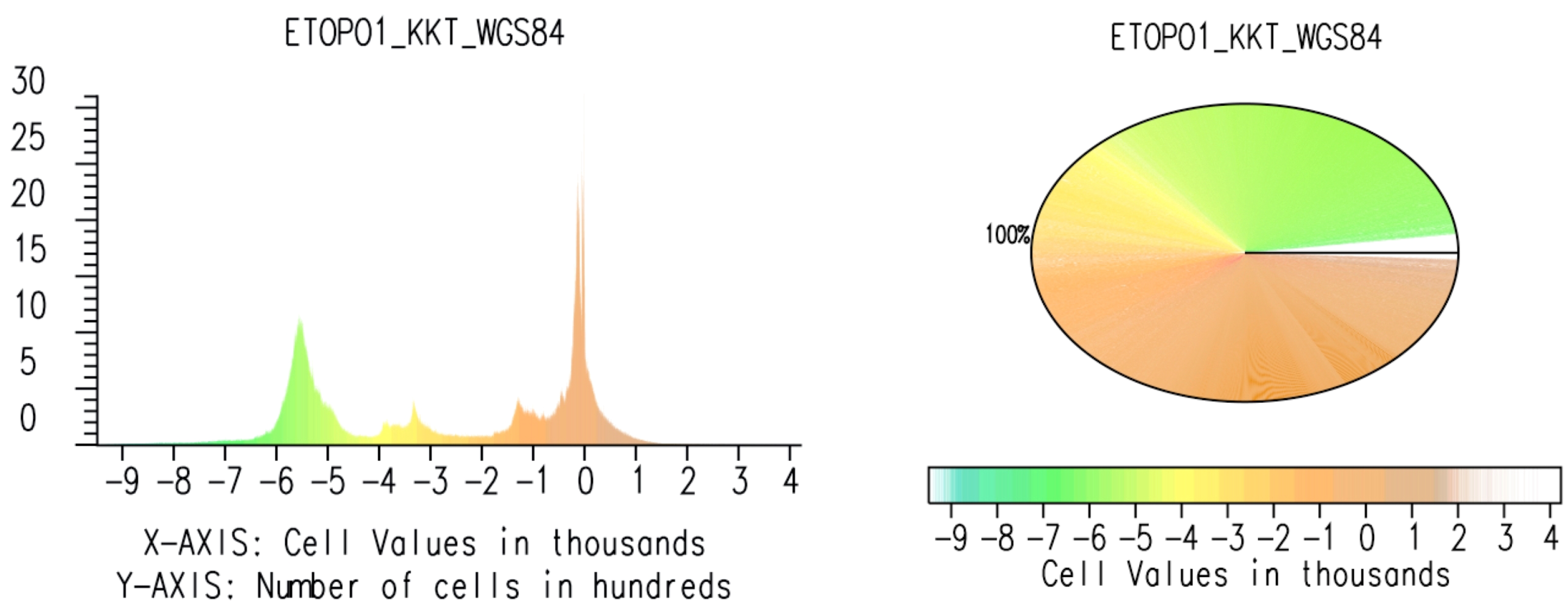
4.3. Analysis of the Elevation Frequency
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ASCII | American Standard Code for Information Interchange |
| AOI | Area of Interest |
| CLI | Command Line Interface |
| DEM | Digital Elevation Model |
| EGM96 | Earth Gravitational Model of 1996 |
| EGM2008 | Earth Gravitational Model of 2008 |
| ENVI | Environment for Visualizing Images |
| EPSG | European Petroleum Survey Group |
| ETOPO1 | Earth’s surface topography |
| GDAL | Geospatial Data Abstraction Library |
| GEBCO | General Bathymetric Chart of the Oceans |
| GIS | Geographic Information System |
| GMT | Generic Mapping Tools |
| GRASS | Geographic Resources Analysis Support System |
| GUI | Graphical User Interface |
| NOAA | National Oceanic and Atmospheric Administration |
| PROJ | a library for performing conversions between cartographic projections |
| QGIS | Quantum GIS |
| SAGA | System for Automated Geoscientific Analyses |
| SRS | Spatial Reference System |
| SRTM | Shuttle Radar Topography Mission |
| TIFF | Tag Image File Format |
| UTM | Universal Transverse Mercator |
| WGS84 | World Geodetic System 1984 |
| WESN | West East South North |
References
- Wang, J.; Wu, F. Advances in Cartography and Geographic Information Engineering; Springer: Singapore, 2022; Volume 638. [Google Scholar] [CrossRef]
- Minár, J.; Evans, I.S.; Jenčo, M. A comprehensive system of definitions of land surface (topographic) curvatures, with implications for their application in geoscience modelling and prediction. Earth-Sci. Rev. 2020, 211, 103414. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Shobe, C.M. Land-surface parameters for spatial predictive mapping and modeling. Earth-Sci. Rev. 2022, 226, 103944. [Google Scholar] [CrossRef]
- Zhou, W. GIS for Earth Sciences. In Encyclopedia of Geology, 2nd ed.; Alderton, D., Elias, S.A., Eds.; Academic Press: Oxford, UK, 2021; pp. 281–293. [Google Scholar] [CrossRef]
- Ruzickova, K.; Ruzicka, J.; Bitta, J. A new GIS-compatible methodology for visibility analysis in digital surface models of earth sites. Geosci. Front. 2021, 12, 101109. [Google Scholar] [CrossRef]
- Deseilligny, M.; Le Men, H.; Stamon, G. Map understanding for GIS data capture: Algorithms for road network graph reconstruction. In Proceedings of the 2nd International Conference on Document Analysis and Recognition (ICDAR ’93), Tsukuba, Japan, 20–22 October 1993; pp. 676–679. [Google Scholar] [CrossRef]
- Sasso, D.; Biles, W.E. An object-oriented programming approach for a GIS data-driven simulation model of traffic on an inland waterway. In Proceedings of the 2008 Winter Simulation Conference, Miami, FL, USA, 7–10 December 2008; pp. 2590–2594. [Google Scholar] [CrossRef] [Green Version]
- Rathod, N.; Subramanian, R.; Sundaresan, R. Data-Driven and GIS-Based Coverage Estimation in a Heterogeneous Propagation Environment. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Shrestha, B.; Devarakonda, R.; Palanisamy, G. An open source framework to add spatial extent and geospatial visibility to Big Data. In Proceedings of the 2014 IEEE International Conference on Big Data (Big Data), Washington, DC, USA, 27–30 October 2014; pp. 64–66. [Google Scholar] [CrossRef]
- Scott, G.J.; Angelov, G.A.; Reinig, M.L.; Gaudiello, E.C.; England, M.R. cvTile: Multilevel parallel geospatial data processing with OpenCV and CUDA. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 139–142. [Google Scholar] [CrossRef]
- Scott, G.J.; Backus, K.; Anderson, D.T. A multilevel parallel and scalable single-host GPU cluster framework for large-scale geospatial data processing. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 2475–2478. [Google Scholar] [CrossRef]
- Chen, T.; Yuan, H.y.; Yang, R.; Chen, J. Integration of GIS and Computational Models for Emergency Management. In Proceedings of the 2008 International Conference on Intelligent Computation Technology and Automation (ICICTA), Changsha, China, 20–22 October 2008; Volume 2, pp. 255–258. [Google Scholar] [CrossRef]
- Li, G.; Zhang, J.; Wang, N. Construction and Implementation of Spatial Analysis Model Based on Geographic Information System (GIS)—A Case Study of Simulation for Urban Thermal Field. In Proceedings of the 2008 International Conference on Computational Intelligence for Modelling Control & Automation, Vienna, Austria, 10–12 December 2008; pp. 1095–1098. [Google Scholar] [CrossRef]
- Zhang, J.; Luo, W.; Yuan, L.; Mei, W. Shortest path algorithm in GIS network analysis based on Clifford algebra. In Proceedings of the 2010 2nd International Conference on Future Computer and Communication, Wuhan, China, 21–24 May 2010; Volume 1, pp. 432–436. [Google Scholar] [CrossRef]
- Huang, Z.; Fang, Y. A novel approach for geospatial computational task processing in Grid environment. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 3980–3982. [Google Scholar] [CrossRef]
- Franges, S.; Zupan, R. New encouragement on cartographic visualisation. In Proceedings of the ISPA 2001—Proceedings of the 2nd International Symposium on Image and Signal Processing and Analysis—In conjunction with 23rd International Conference on Information Technology Interfaces (IEEE Cat.), Pula, Croatia, 19–21 June 2001; pp. 368–372. [Google Scholar] [CrossRef]
- Zhang, B.; Ran, H.; Yu, J. Visualizaiton of water system based on the cartographic presentation. In Proceedings of the 2012 International Symposium on Geomatics for Integrated Water Resource Management, Lanzhou, China, 19–21 October 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Yamaguchi, N. Visualizing states in autoregressive hidden Markov models using generative topographic mapping. In Proceedings of the 2012 8th International Conference on Natural Computation, Chongqing, China, 29–31 May 2012; pp. 138–142. [Google Scholar] [CrossRef]
- Pazouki, E. A smart surface irrigation design based on the topographical and geometrical shape characteristics of the land. Agric. Water Manag. 2023, 275, 108046. [Google Scholar] [CrossRef]
- Moreira, E.P.; Valeriano, M.M. Application and evaluation of topographic correction methods to improve land cover mapping using object-based classification. Int. J. Appl. Earth Obs. Geoinf. 2014, 32, 208–217. [Google Scholar] [CrossRef]
- Chowdhury, M.S. Modelling hydrological factors from DEM using GIS. MethodsX 2023, 10, 102062. [Google Scholar] [CrossRef] [PubMed]
- Boulton, S.J.; Stokes, M. Which DEM is best for analyzing fluvial landscape development in mountainous terrains? Geomorphology 2018, 310, 168–187. [Google Scholar] [CrossRef]
- Buterez, C.; Olariu, B.; Mihai, B.; Rujoiu-Mare, M.; Cruceru, I. General topography of Prahova County, Romania. J. Maps 2016, 12, 541–545. [Google Scholar] [CrossRef] [Green Version]
- Duncan, D.T.; Regan, S.D. Mapping multi-day GPS data: A cartographic study in NYC. J. Maps 2016, 12, 668–670. [Google Scholar] [CrossRef] [Green Version]
- Duarte, L.; Teodoro, A.C.; Sousa, J.J.; Pádua, L. QVigourMap: A GIS Open Source Application for the Creation of Canopy Vigour Maps. Agronomy 2021, 11, 952. [Google Scholar] [CrossRef]
- Armstrong, M.P. Geography and computational science. Ann. Am. Assoc. Geogr. 2000, 90, 146–156. [Google Scholar] [CrossRef]
- Duarte, L.; Teodoro, A.C.; Maia, D.; Barbosa, D. Radio Astronomy Demonstrator: Assessment of the Appropriate Sites through a GIS Open Source Application. ISPRS Int. J. Geo-Inf. 2016, 5, 209. [Google Scholar] [CrossRef] [Green Version]
- Brovelli, M.A.; Mitasova, H.; Neteler, M.; Raghavan, V. Free and open source desktop and Web GIS solutions. Appl. Geomat. 2012, 4, 65–66. [Google Scholar] [CrossRef]
- Christl, A. Free Software and Open Source Business Models. In Open Source Approaches in Spatial Data Handling; Advances in Geographic Information Science; Hall, G.B., Leahy, M.G., Eds.; Springer: Berlin, Germany, 2008; Chapter 2; pp. 21–48. [Google Scholar] [CrossRef]
- Turton, I. Geo Tools. In Open Source Approaches in Spatial Data Handling; Springer: Berlin/Heidelberg, Germany, 2008; pp. 153–169. [Google Scholar] [CrossRef] [Green Version]
- Barnes, N. Publish your computer code: It is good enough. Nature 2010, 467, 753. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Issaka, Y.; Kumi-Boateng, B. Artificial intelligence techniques for predicting tidal effects based on geographic locations in Ghana. Geod. Cartogr. 2020, 46, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Lemenkova, P.; Debeir, O. Quantitative Morphometric 3D Terrain Analysis of Japan Using Scripts of GMT and R. Land 2023, 12, 261. [Google Scholar] [CrossRef]
- Ajvazi, B.; Czimber, K. A comparative analysis of different DEM interpolation methods in GIS: Case study of Rahovec, Kosovo. Geod. Cartogr. 2019, 45, 43–48. [Google Scholar] [CrossRef] [Green Version]
- Guan, Q.; Hu, S.; Liu, Y.; Yun, S. High-Performance GeoComputation with the Parallel Raster Processing Library. In GeoComputational Analysis and Modeling of Regional Systems; Springer International Publishing: Cham, Switzerland, 2018; pp. 55–74. [Google Scholar] [CrossRef]
- Kralidis, A.T. Geospatial Open Source and Open Standards Convergences. In Open Source Approaches in Spatial Data Handling; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–20. [Google Scholar] [CrossRef]
- Wagemann, J.; Siemen, S.; Seeger, B.; Bendix, J. Users of open Big Earth data—An analysis of the current state. Comput. Geosci. 2021, 157, 104916. [Google Scholar] [CrossRef]
- Basith, A.; Prastyani, R. Evaluating ACOMP, FLAASH and QUAC on Worldview-3 for satellite derived bathymetry (SDB) in shallow water. Geod. Cartogr. 2020, 46, 151–158. [Google Scholar] [CrossRef]
- Habib, M.; Alfugara, A.; Pradhan, B. A low-cost spatial tool for transforming feature positions of CAD-based topographic mapping. Geod. Cartogr. 2019, 45, 161–168. [Google Scholar] [CrossRef] [Green Version]
- Yin, Z.; Li, J.; Liu, Y.; Xie, Y.; Zhang, F.; Wang, S.; Sun, X.; Zhang, B. Water clarity changes in Lake Taihu over 36 years based on Landsat TM and OLI observations. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102457. [Google Scholar] [CrossRef]
- Chen, L.; Ma, Y.; Lian, Y.; Zhang, H.; Yu, Y.; Lin, Y. Radiometric Normalization Using a Pseudo-Invariant Polygon Features-Based Algorithm with Contemporaneous Sentinel-2A and Landsat-8 OLI Imagery. Appl. Sci. 2023, 13, 2525. [Google Scholar] [CrossRef]
- Rey, S.J. Code as Text: Open Source Lessons for Geospatial Research and Education. In GeoComputational Analysis and Modeling of Regional Systems; Springer International Publishing: Cham, Switzerland, 2018; pp. 7–21. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Q.; Tu, W.; Mai, K.; Yao, Y.; Chen, Y. Functional urban land use recognition integrating multi-source geospatial data and cross-correlations. Comput. Environ. Urban Syst. 2019, 78, 101374. [Google Scholar] [CrossRef]
- Kim, S.; Hoang, Y.; Yu, T.T.; Kanwar, Y.S. GeoYCSB: A Benchmark Framework for the Performance and Scalability Evaluation of Geospatial NoSQL Databases. Big Data Res. 2023, 31, 100368. [Google Scholar] [CrossRef]
- Teixeira, J.; Chaminé, H.I.; Carvalho, J.M.; Pérez-Alberti, A.; Rocha, F. Hydrogeomorphological mapping as a tool in groundwater exploration. J. Maps 2013, 9, 263–273. [Google Scholar] [CrossRef]
- Sâvulescu, I.; Mihai, B. Mapping forest landscape change in Iezer Mountains, Romanian Carpathians. A GIS approach based on cartographic heritage, forestry data and remote sensing imagery. J. Maps 2011, 7, 429–446. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Santana, J.R.; Méndez-Linares, A.P.; López-Portillo, J.A.; Preciado-López, J.C. Coastal geomorphological cartography of Veracruz State, Mexico. J. Maps 2016, 12, 316–323. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, J.; Viveiros, D.; Ferreira, J.; Lopez-Gil, A.; Dominguez-Lopez, A.; Martins, H.F.; Perez-Herrera, R.; Lopez-Aldaba, A.; Duarte, L.; Pinto, A.; et al. ECOAL Project—Delivering Solutions for Integrated Monitoring of Coal-Related Fires Supported on Optical Fiber Sensing Technology. Appl. Sci. 2017, 7, 956. [Google Scholar] [CrossRef]
- Kiani, M.; Chegini, N.; Safari, A.; Nazari, B. Spheroidal spline interpolation and its application in geodesy. Geod. Cartogr. 2020, 46, 123–135. [Google Scholar] [CrossRef]
- Bivand, R. Using the R statistical data analysis language on GRASS 5.0 GIS database files. Comput. Geosci. 2000, 26, 1043–1052. [Google Scholar] [CrossRef] [Green Version]
- Bivand, R.S. Integrating GRASS 5.0 and R: GIS and Modern Statistics for Data Analysis; Technical Report 228; University of Bergen, Department of Geography: Bergen, Norway, 1999. [Google Scholar]
- Lemenkova, P.; Debeir, O. R Libraries for Remote Sensing Data Classification by K-Means Clustering and NDVI Computation in Congo River Basin, DRC. Appl. Sci. 2022, 12, 12554. [Google Scholar] [CrossRef]
- Grohmann, C.H. Morphometric analysis in Geographic Information Systems: Applications of free software GRASS and R. Comput. Geosci. 2004, 30, 1055–1067. [Google Scholar] [CrossRef] [Green Version]
- Chapman, C.A. A new quantitative method of topographic analysis. Am. J. Sci. 1952, 250, 428–452. [Google Scholar] [CrossRef]
- Hofierka, J.; Mitasova, H.; Neteler, M. Geomorphometry in GRASS GIS. In Geomorphometry: Concepts, Software, Applications—Developments in Soil Science; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 387–410. [Google Scholar] [CrossRef]
- Hofierka, J.; Súri, M. The solar radiation model for Open Source GIS: Implementation and applications. In Proceedings of the Open Source Free Software GIS—GRASS Users Conference, Trento, Italy, 11–13 September 2002; pp. 11–13. [Google Scholar]
- Mitas, L.; Mitasova, H. Spatial interpolation. In Geographical Information Systems: Principles, Techniques, Management and Applications; Longley, P., Goodchild, M., Maguire, D., Rhind, D., Eds.; Wiley: New York, NY, USA, 1999; pp. 481–492. [Google Scholar]
- Mitasova, H.; Hofierka, J.; Zlocha, M.; Iverson, L. Modeling topographic potential for erosion and deposition using GIS. Int. J. Geogr. Inf. Sci. 1996, 10, 629–641. [Google Scholar] [CrossRef] [Green Version]
- Lemenkova, P.; Debeir, O. Satellite Image Processing by Python and R Using Landsat 9 OLI/TIRS and SRTM DEM Data on Côte d’Ivoire, West Africa. J. Imaging 2022, 8, 317. [Google Scholar] [CrossRef]
- Lemenkova, P. Geodynamic setting of Scotia Sea and its effects on geomorphology of South Sandwich Trench, Southern Ocean. Pol. Polar Res. 2020, 42, 1–23. [Google Scholar] [CrossRef]
- Clarke, K.C. Computation of the fractal dimension of topographic surfaces using the triangular prism surface area method. Comput. Geosci. 1986, 12, 713–722. [Google Scholar] [CrossRef]
- Sofia, G. Combining geomorphometry, feature extraction techniques and Earth-surface processes research: The way forward. Geomorphology 2020, 355, 107055. [Google Scholar] [CrossRef]
- Lemenkova, P.; Debeir, O. Seismotectonics of Shallow-Focus Earthquakes in Venezuela with Links to Gravity Anomalies and Geologic Heterogeneity Mapped by a GMT Scripting Language. Sustainability 2022, 14, 15966. [Google Scholar] [CrossRef]
- Lemenkova, P.; Debeir, O. Satellite Altimetry and Gravimetry Data for Mapping Marine Geodetic and Geophysical Setting of the Seychelles and the Somali Sea, Indian Ocean. J. Appl. Eng. Sci. 2022, 12, 191–202. [Google Scholar] [CrossRef]
- Malinverno, A. Fractals and Ocean Floor Topography: A Review and a Model. In Fractals in the Earth Sciences; Springer US: Boston, MA, USA, 1995; pp. 107–130. [Google Scholar] [CrossRef]
- Cui, Q.; Zhou, Y.; Liu, L.; Gao, Y.; Li, G.; Zhang, S. The topography of the 660-km discontinuity beneath the Kuril-Kamchatka: Implication for morphology and dynamics of the northwestern Pacific slab. Earth Planet. Sci. Lett. 2023, 602, 117967. [Google Scholar] [CrossRef]
- Neteler, M.; Mitasova, H. Open Source GIS—A GRASS GIS Approach, 3rd ed.; Springer: New York, NY, USA, 2008. [Google Scholar]
- Neteler, M.; Beaudette, D.; Cavallini, P.; Lami, L.; Cepicky, J. GRASS GIS. In Open Source Approaches in Spatial Data Handling; Springer: Berlin/Heidelberg, Germany, 2008; pp. 171–199. [Google Scholar] [CrossRef]
- Neteler, M. Geosynthesis 11: Der Praktische Leitfaden zum Geographischen Informationssystem GRASS. In GRASS-Handbuch; University of Hannover: Hannover, Germany, 2000. [Google Scholar]
- Wessel, P.; Luis, J.F.; Uieda, L.; Scharroo, R.; Wobbe, F.; Smith, W.H.F.; Tian, D. The Generic Mapping Tools version 6. Geochem. Geophys. Geosystems 2019, 20, 5556–5564. [Google Scholar] [CrossRef] [Green Version]
- GDAL/OGR Contributors. GDAL/OGR Geospatial Data Abstraction Software Library; Open Source Geospatial Foundation: Chicago, IL, USA, 2020. [Google Scholar]
- Defense Mapping Agency. Department of Defense World Geodetic System 1984: Its Definition and Relationships with Local Geodetic Systems: Technical Report; Technical Report 8350; Defense Mapping Agency: Fairfax, VA, USA, 1991. [Google Scholar]
- Brown, W.; Astley, M.; Baker, T.; Mitasova, H. GRASS as an integrated GIS and visualization environment for spatio-temporal modeling. In Proceedings of the Auto-Carto XII, ACSM/ASPRS, Charlotte, NC, USA, 27 February–2 March 1995; Volume 1, pp. 89–99. [Google Scholar]
- Golden Software, Inc. Full User’s Guide: Surfer 12—Powerful Contouring, Gridding, and Surface Mapping; Golden Software, Inc.: Golden, CO, USA, 2014. [Google Scholar]
- Schmidt, J.; Evans, I.S.; Brinkmann, J. Comparison of polynomial models for land surface curvature calculation. Int. J. Geogr. Inf. Sci. 2003, 17, 797–814. [Google Scholar] [CrossRef]
- Gallant, J.C.; Moore, I.D.; Hutchinson, M.F.; Gessler, P. Estimating fractal dimension of profiles: A comparison of methods. Math. Geol. 1994, 26, 455–481. [Google Scholar] [CrossRef]
- Hodgson, M.E. What cell size does the computed slope/aspect angle represent? Photogramm. Eng. Remote Sens. 1995, 61, 513–517. [Google Scholar]
- Hodgson, M.E. Comparison of Angles from Surface Slope/Aspect Algorithms. Cartogr. Geogr. Inf. Syst. 1998, 25, 173–185. [Google Scholar] [CrossRef]
- Zevenbegen, L.W.; Thorne, C.R. Quantitative analysis of land surface topography. Earth Surf. Process. Landforms 1987, 12, 47–56. [Google Scholar] [CrossRef]
- Dikau, R. The application of a digital relief model to landform analysis in geomorphology. In Three Dimensional Applications in Geographic Information Systems; Taylor & Francis: London, UK, 1989; pp. 51–77. [Google Scholar] [CrossRef]
- Dunn, M.; Hickey, R. The Effect of Slope Algorithms on Slope estimates within a GIS. Cartography 1998, 27, 9–15. [Google Scholar] [CrossRef]
- Guth, P.L. Slope and aspect calculations on gridded digital elevation models: Examples from a geomorphometric toolbox for personal computers. Z. Geomorphol. 1995, 101, 31–52. [Google Scholar]
- Heerdegan, R.G.; Beran, M.A. Quantifying source areas through land surface curvature and shape. J. Hydrol. 1982, 57, 359–373. [Google Scholar] [CrossRef]
- Mitasova, H.; Mitas, L.; Brown, W.; Gerdes, D.; Kosinovsky, I.; Baker, T. Modeling spatially and temporally distributed phenomena: New methods and tools for GRASS GIS. Int. J. Geogr. Inf. Sci. 1995, 9, 433–446. [Google Scholar] [CrossRef]
- Evers, K.; Knudsen, T. Transformation pipelines for PROJ.4. In Surveying the World of Tomorrow—From Digitalisation to Augmented Reality, Prceedings of the FIG Working Week 2017, Helsinki, Finland, 29 May–2 June 2017; Gim International: Latina, Italy, 2017; pp. 1–13. [Google Scholar]
- Snyder, J.P. Map Projections—A Working Manual; l. U.S. Geological Professional Paper; U.S. Government Printing Office: Washington, DC, USA, 1987; 385p.
- Evenden, G.I. Cartographic Projection Procedures for the UNIX Environment—A User’s Manual; Technical Report 90-284, USGS Open-File Report; USGS: Reston, VA, USA, 1990.
- Dassau, O.; Holl, S.; Neteler, M.; Redslob, M. An Introduction to the Practical Use of the Free Geographical Information System GRASS 6.0. version 1.2; GDF Hannover: Hannover, Germany, 2005. [Google Scholar]
- Mitasova, H. Cartographic Aspects of Computer Surface Modeling. Ph.D. Thesis, Slovak Technical University, Bratislava, Slovakia, 1985. [Google Scholar]
- Horn, B.K.P. Hill Shading and the Reflectance Map. Proc. IEEE 1981, 69, 14–47. [Google Scholar] [CrossRef] [Green Version]
- Antrop, M.; De Maeyer, P.; Neutens, T.; Van de Weghe, N. Geografische Informatiesystemen; Academia Press: Gent, Belgium, 2013. [Google Scholar]
- Bailey, T.; Gatrell, A. Interactive Spatial Data Analysis; Longman Scientific: Harlow, UK; John Wiley & Sons: New York, NY, USA, 1995. [Google Scholar]
- Burrough, P.A.; McDonnell, R.A. Principles of Geographical Information Systems; Oxford University Press: Oxford, UK, 1998. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lemenkova, P.; Debeir, O. GDAL and PROJ Libraries Integrated with GRASS GIS for Terrain Modelling of the Georeferenced Raster Image. Technologies 2023, 11, 46. https://doi.org/10.3390/technologies11020046
Lemenkova P, Debeir O. GDAL and PROJ Libraries Integrated with GRASS GIS for Terrain Modelling of the Georeferenced Raster Image. Technologies. 2023; 11(2):46. https://doi.org/10.3390/technologies11020046
Chicago/Turabian StyleLemenkova, Polina, and Olivier Debeir. 2023. "GDAL and PROJ Libraries Integrated with GRASS GIS for Terrain Modelling of the Georeferenced Raster Image" Technologies 11, no. 2: 46. https://doi.org/10.3390/technologies11020046