
Numerical Prediction of Unsteady Aerodynamics of a Ducted Fan Unmanned Aerial Vehicle in Hovering

Abstract
:1. Introduction
2. Numerical Method
2.1. Governing Equations
2.2. Turbulence Model
2.3. Numerical Discretization Method
3. Method Validation
3.1. Propeller Model
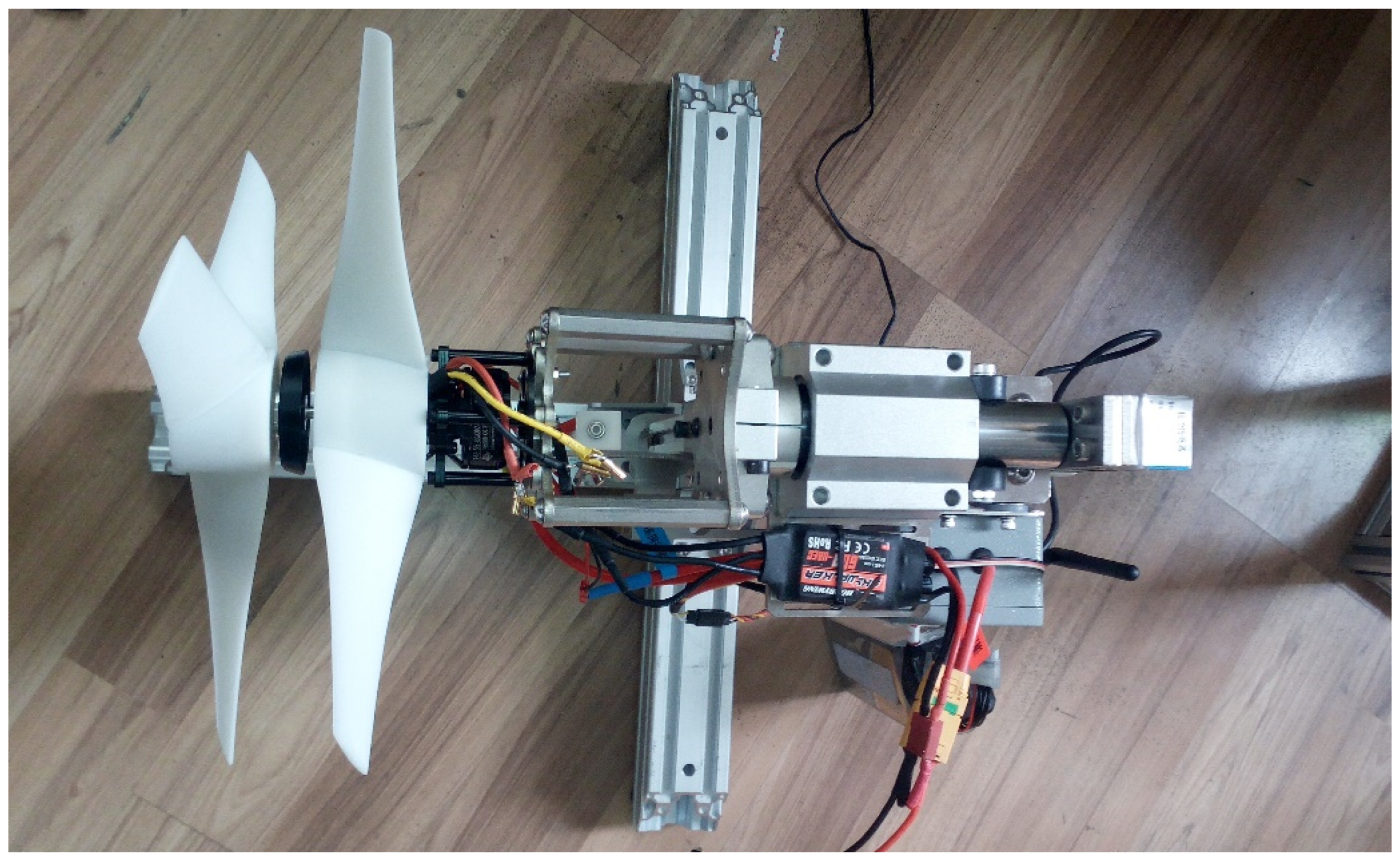
3.2. Experimental Setup
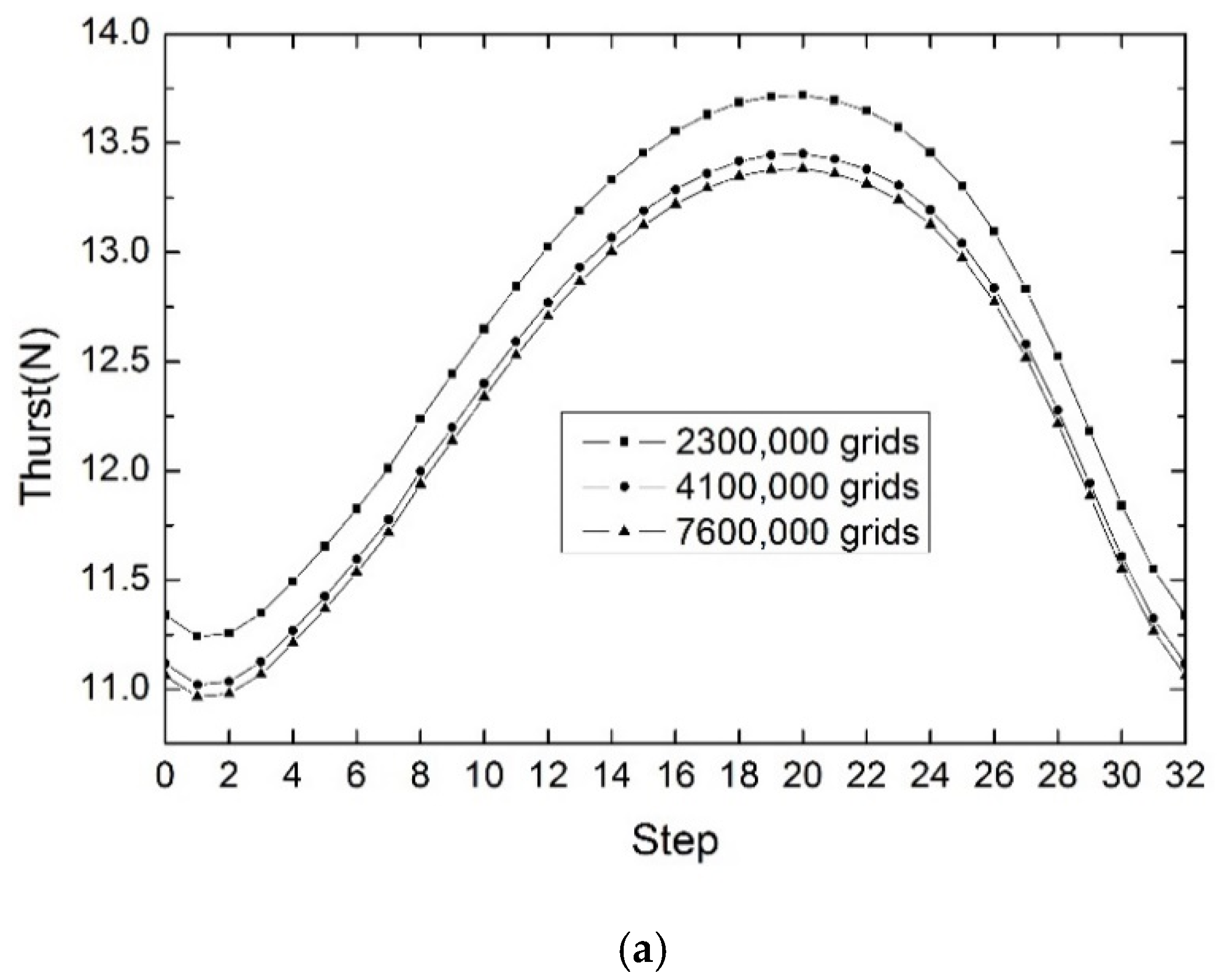
3.3. Grid and Time-Step Sensitivity Test
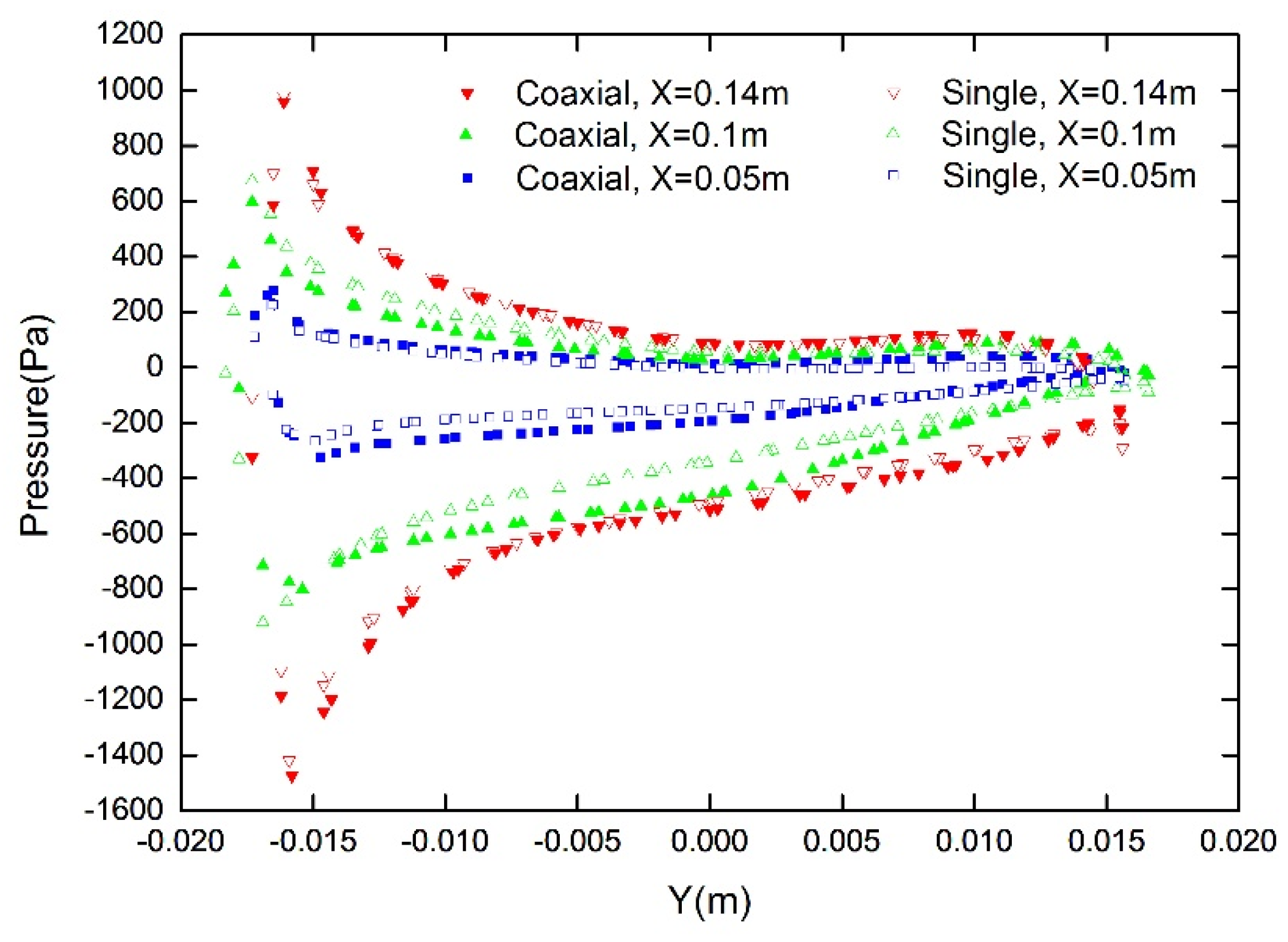
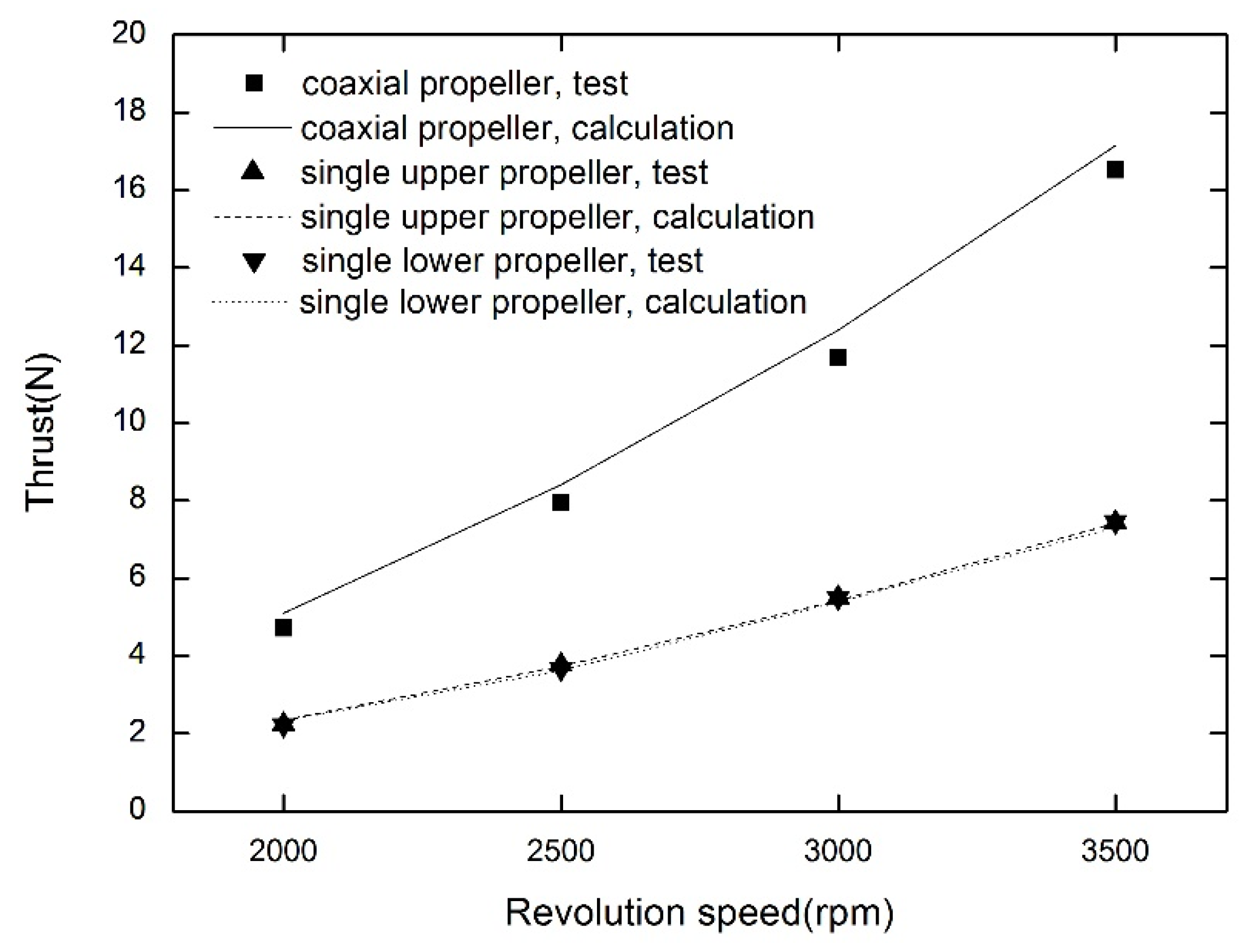
3.4. Validation Results
4. Aerodynamic Characteristics of a Ducted Fan UAV
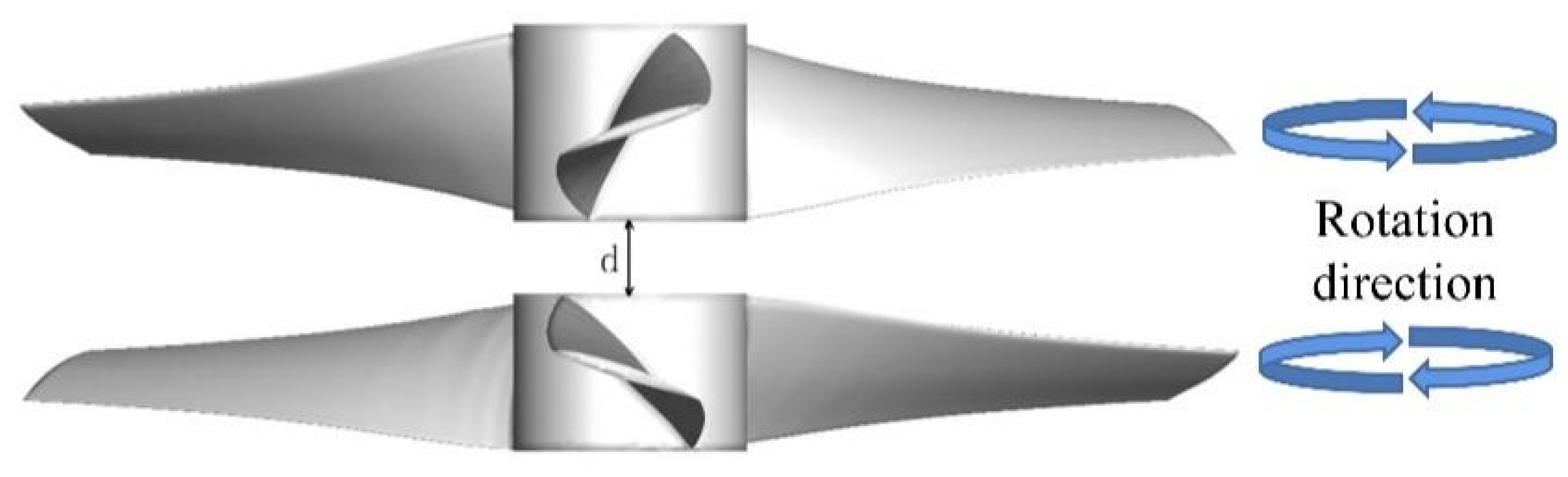
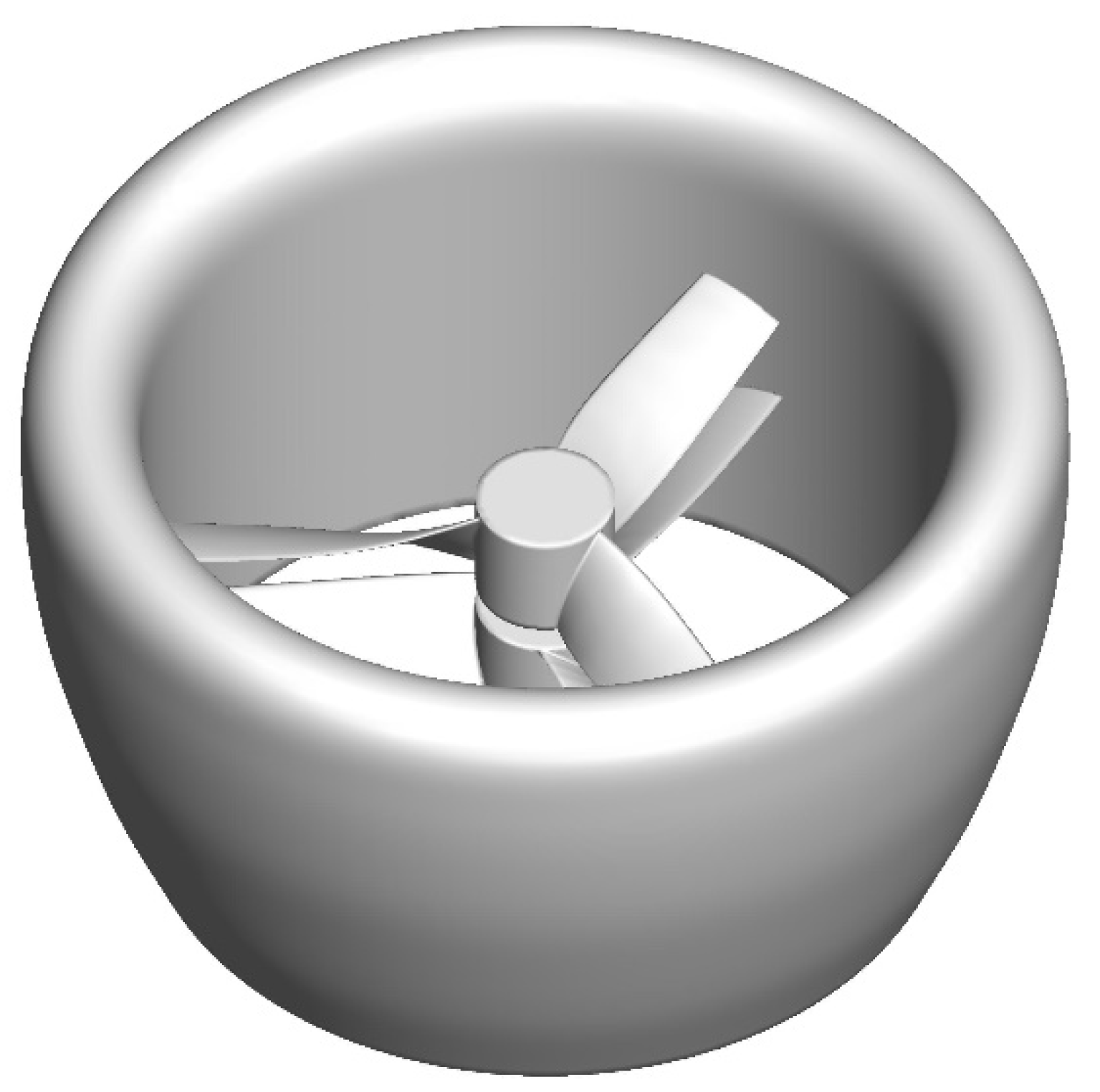
4.1. Vehicle Description
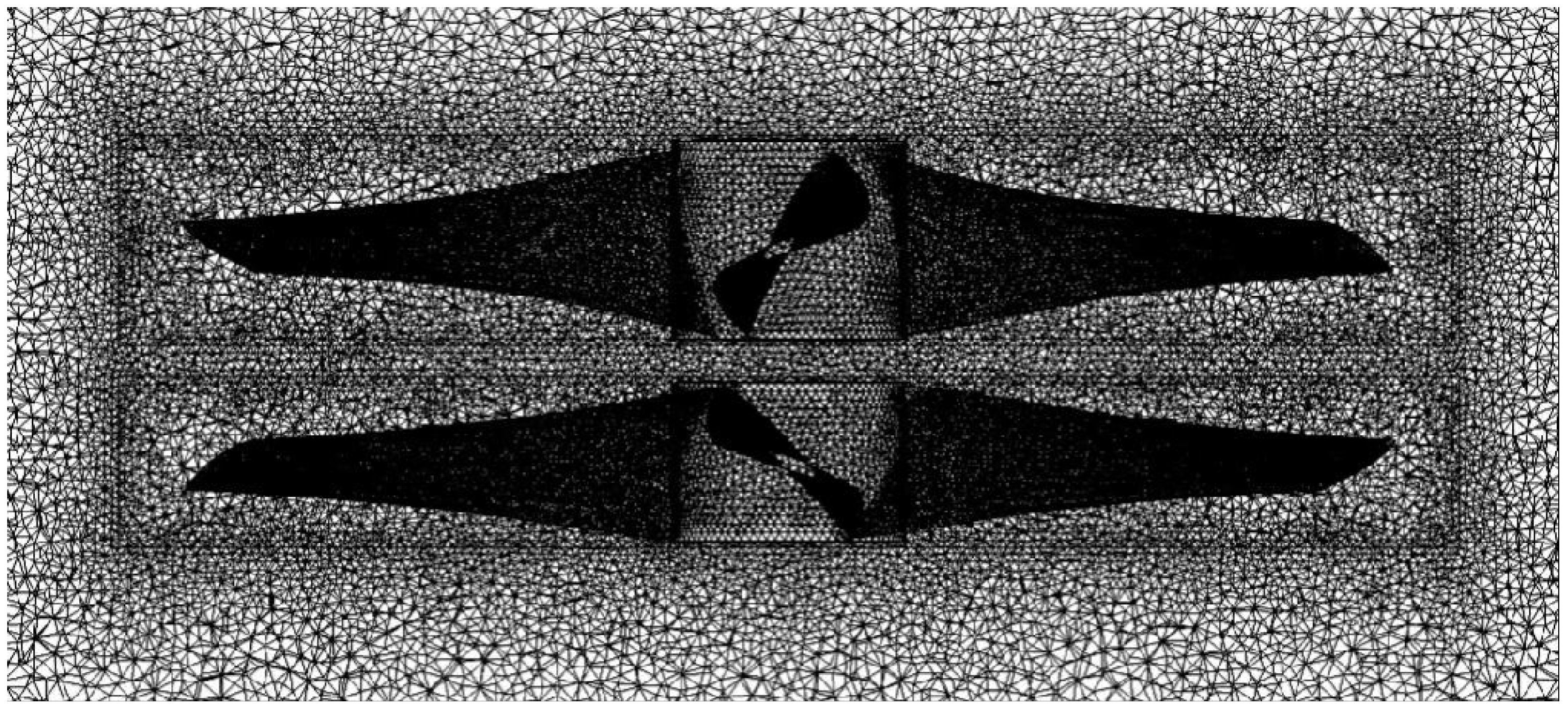
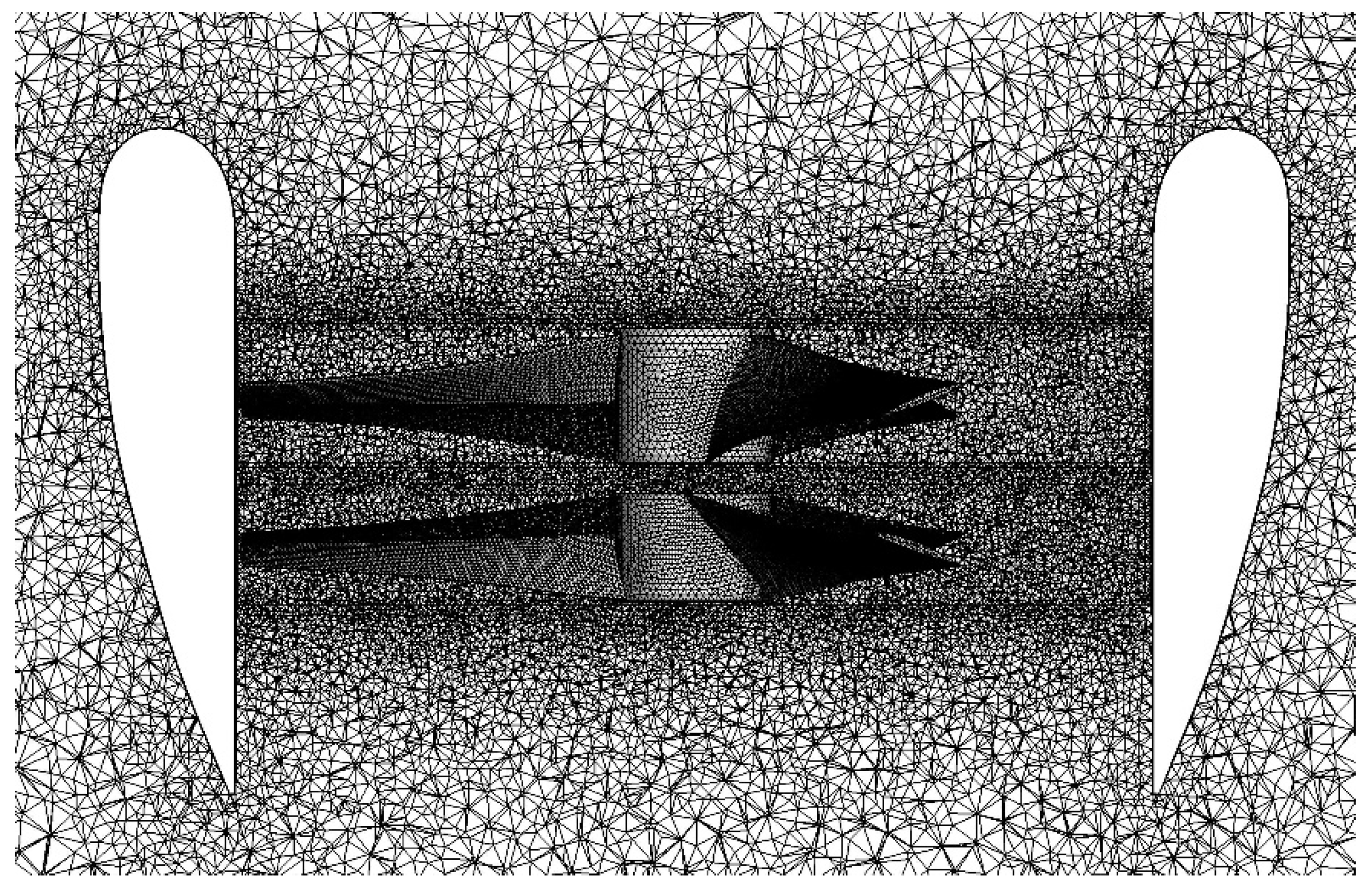
4.2. Mesh Generation
4.3. Results
5. Conclusions
- The CFD model established is a reliable tool for numerical simulation of aerodynamic interaction between propellers.
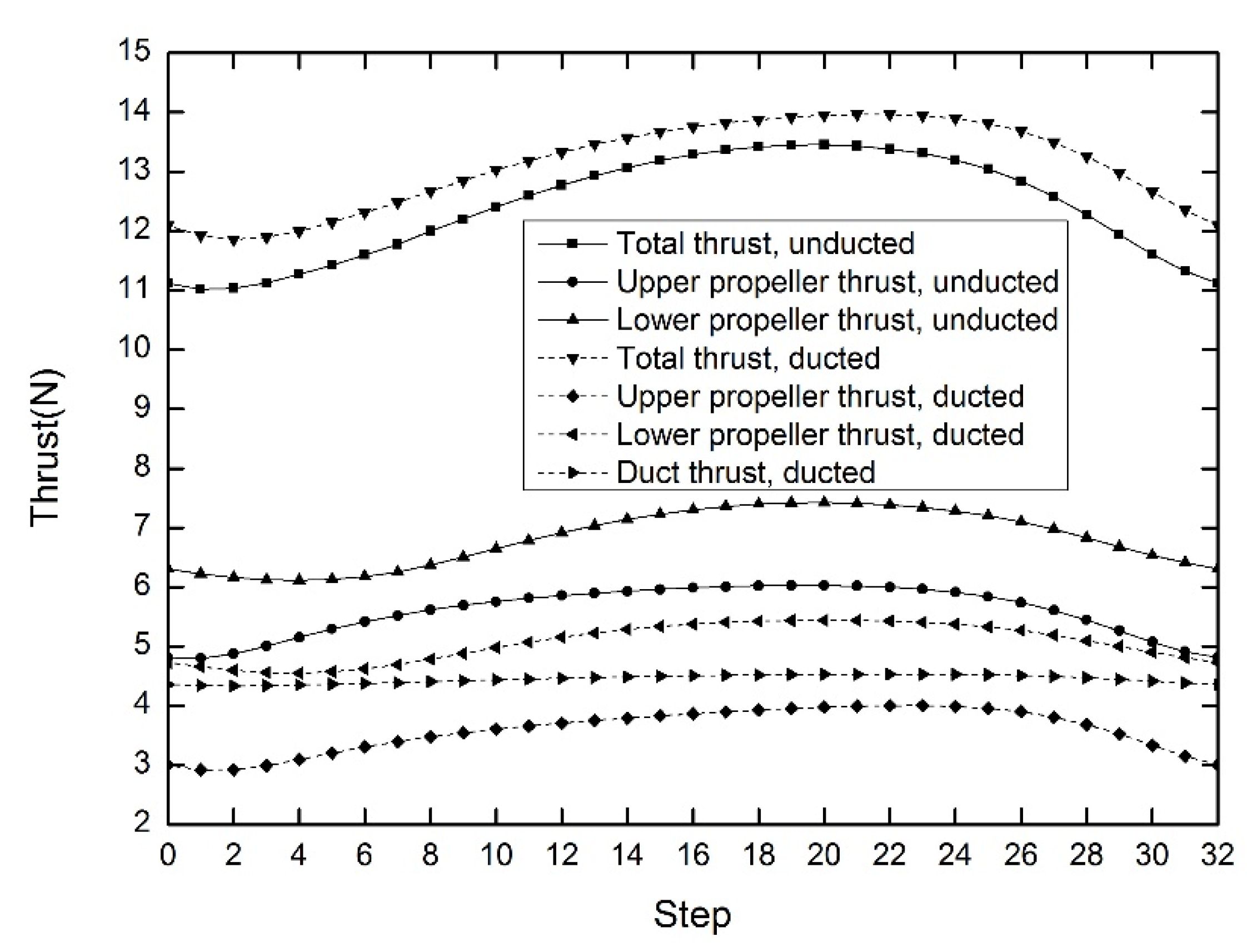
- Contrary to prior knowledge, the unducted coaxial upper and lower propellers generate 3.8%, 4.3% more thrust than unducted single propellers, respectively.
- The unducted upper and lower propellers generate 55.9%, 34.9% more thrust than ducted propellers, respectively.
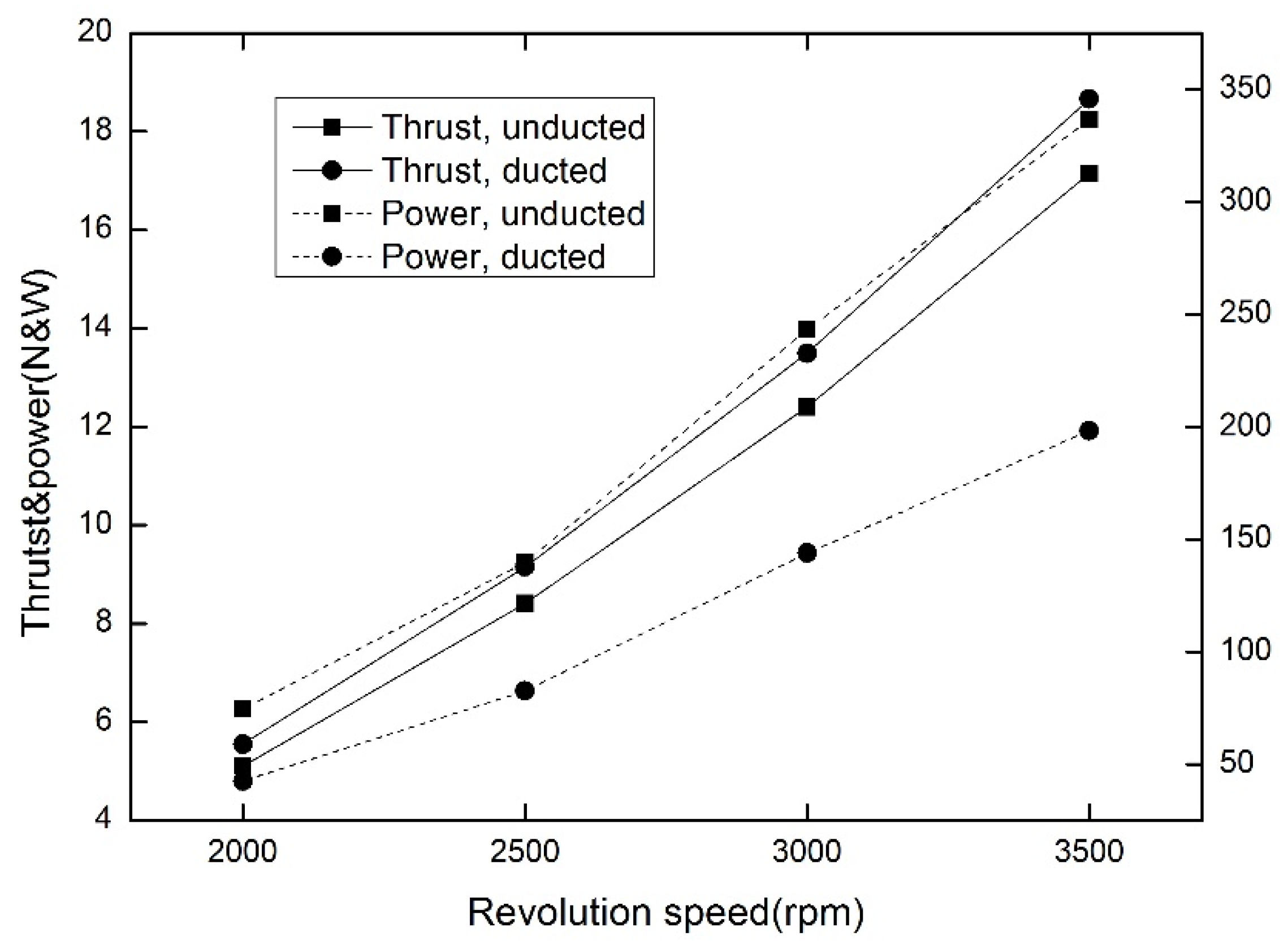
- The ducted fan UAV generates 5.7% more thrust and consumes 39.1% less power than the coaxial propellers.
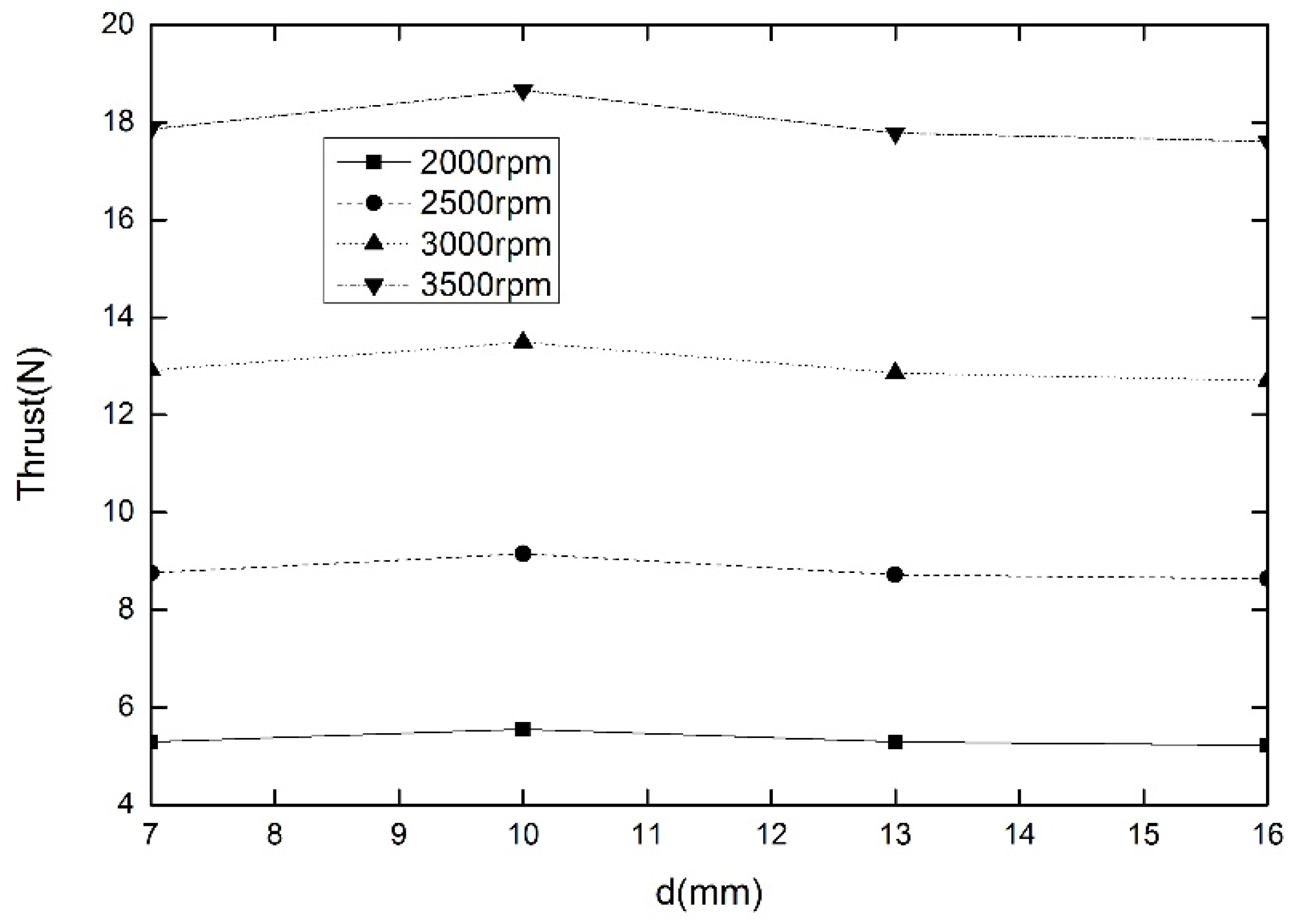
- The thrust of the ducted fan UAV increases first and then decreases as the distance between propellers increases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| heat capacity at constant pressure | |
| source terms of the momentum equations | |
| source terms of the energy equation | |
| temperature | |
| U | air velocity |
| g | heat capacity ratio at constant pressure |
| r | air density |
| CFD | Computational Fluid Dynamics |
| UAV | Unmanned Aerial Vehicle |
| MUSCL | Monotone Upstream-centered Schemes for Conservation laws |
| RANS | Reynolds-Averaged Navier–Stokes equations |
| rpm | Revolutions Per Minute |
| SIMPLE | Semi-Implicit Method for Pressure-Linked Equations |
| SLA | Stereo Lithography Appearance |
| SST | Shear Stress Transfer |
| UAV | Unmanned Aerial Vehicles |
References
- Kim, M.; Kondak, K.; Ott, C. A stabilizing controller for regulation of UAV with manipulator. IEEE Robot. Autom. Lett. 2018, 3, 1719–1726. [Google Scholar] [CrossRef]
- Deng, H.; Xiao, H. Numerical simulation of a flexible X-wing flapping-wing micro air vehicle. AIAA J. 2017, 55, 2295–2307. [Google Scholar] [CrossRef]
- Swarnkar, S.; Parwana, H.; Kothari, M. Biplane-quadrotor tail-sitter UAV: Flight dynamics and control. J. Guid. Control Dyn. 2018, 41, 1049–1067. [Google Scholar] [CrossRef]
- Hrishikeshavan, V.; Black, J.; Chopra, I. Design and performance of a quad-shrouded rotor micro air vehicle. J. Aircr. 2014, 51, 779–791. [Google Scholar] [CrossRef]
- Misiorowski, M.; Gandhi, F.; Oberai, A. Computational study of diffuser length on ducted rotor performance in edgewise flight. AIAA J. 2019, 57, 796–809. [Google Scholar] [CrossRef]
- Akturk, A.; Camci, C. Double-ducted fan as an effective lip separation control concept for vertical-takeoff-and-landing vehicles. J. Aircr. 2022, 59, 233–252. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, P.; Jacob, S.; Trigell, E.; Åbom, M. Investigation of extended-tube lines for control of low-frequency duct noise. AIAA J. 2021, 59, 4179–4194. [Google Scholar] [CrossRef]
- Cai, M.; Wu, L.; Deng, H.; Xiao, T. Numerical prediction of unsteady aerodynamics for a ducted fan micro air vehicle. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 87–95. [Google Scholar] [CrossRef]
- Rynell, A.; Chevalier, M.; Abom, M.; Efraimsson, G. A numerical study of noise characteristics originating from a shrouded subsonic automotive fan. Appl. Acoust. 2018, 140, 110–121. [Google Scholar] [CrossRef]
- Singh, P.; Venkatesan, C. Experimental performance evaluation of coaxial rotors for a micro aerial vehicle. J. Aircr. 2013, 50, 1465–1481. [Google Scholar] [CrossRef]
- Deng, H.; Ren, L. Experimental study of a ducted contra-rotating lift fan for vertical/short takeoff and landing unmanned aerial vehicle application. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 232, 3108–3117. [Google Scholar] [CrossRef]
- Siavash, N.; Najafi, G.; Hashjin, T.; Ghobadian, B.; Mahmoodi, E. An innovative variable shroud for micro wind turbines. Renew. Energy 2020, 145, 1061–1072. [Google Scholar] [CrossRef]
- Akturk, A.; Camci, C. Experimental and computational assessment of a ducted-fan rotor flow model. J. Aircr. 2012, 49, 885–897. [Google Scholar] [CrossRef]
- Bontempo, R.; Manna, M. A nonlinear and semi-analytical actuator disk method accounting for general hub shapes. Part 1. Open rotor. J. Fluid Mech. 2016, 792, 910–935. [Google Scholar] [CrossRef]
- Troldborg, N.; Sorensen, N.; Rethore, E. A consistent method for finite volume discretization of body forces on collocated grids applied to flow through an actuator disk. Comput. Fluids 2015, 119, 197–203. [Google Scholar] [CrossRef]
- Raeisi, B.; Alighanbari, H. Effects of tilting rate variations on the aerodynamics of the tilting ducted fans mounted at the wing tips of a vertical take-off and landing unmanned aerial vehicle. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 232, 1803–1813. [Google Scholar] [CrossRef]
- Ryu, Y.; Cho, S.; Cho, J. Aerodynamic Analysis of the Ducted Fan for a VTOL UAV in Crosswinds. Trans. Jpn. Soc. Aeronaut. Space Sci. 2016, 59, 47–55. [Google Scholar] [CrossRef]
- Ohanian, J.; Karni, D.; Londenberg, K. Ducted-fan force and moment control via steady and synthetic jets. J. Aircr. 2011, 48, 514–526. [Google Scholar] [CrossRef]
- Thouault, N.; Breitdamter, C.; Adams, A. Numerical investigation of inlet distortion on a wing-embedded lift fan. J. Propuls. Power 2011, 27, 16–28. [Google Scholar] [CrossRef]
- Dogru, H.; Guzelbey, H.; Gov, I. Ducted fan effect on the elevation of a concept helicopter when the ducted fantail is located in a ground effect region. J. Aerosp. Eng. 2016, 29, 04015030. [Google Scholar] [CrossRef]
- He, Z.; Liu, N.; Chen, L.; Wang, C.X.; Yang, S. Research on hover characteristics of ducted fan with coaxial rotors. Appl. Mech. Mater. 2013, 427, 216–220. [Google Scholar] [CrossRef]
- Menter, R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Cai, M.; Ma, L.; Li, Z. Unsteady aerodynamic characteristics of ducted coaxial propeller unmmaned aerial vehicle. J. Aerosp. Power 2019, 34, 1699–1707. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Chord of duct (m) | 0.24 |
| Diameter of duct (m) | 0.4 |
| Diameter of propeller (m) | 0.3 |
| Tip clearance (m) | 0.01 |
| Maximal cruise speed (m/s) | 15 |
| Reynolds number | 4.32 × 105 |
| Weight (kg) | 1.2 |
| Parameter | Value |
|---|---|
| Root chord of upper propeller (mm) | 45.3 |
| Tip chord of upper propeller (mm) | 34.1 |
| Incident angle of upper propeller root (degree) | 65.9 |
| Incident angle of upper propeller tip (degree) | 18.6 |
| Root chord of lower propeller (mm) | 44.5 |
| Tip chord of lower propeller (mm) | 34.1 |
| Incident angle of lower propeller root (degree) | 50 |
| Incident angle of lower propeller tip (degree) | 18.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, H.; Zhang, Z.; Deng, S. Numerical Prediction of Unsteady Aerodynamics of a Ducted Fan Unmanned Aerial Vehicle in Hovering. Aerospace 2022, 9, 318. https://doi.org/10.3390/aerospace9060318
Cai H, Zhang Z, Deng S. Numerical Prediction of Unsteady Aerodynamics of a Ducted Fan Unmanned Aerial Vehicle in Hovering. Aerospace. 2022; 9(6):318. https://doi.org/10.3390/aerospace9060318
Chicago/Turabian StyleCai, Hongming, Zhuoran Zhang, and Shuanghou Deng. 2022. "Numerical Prediction of Unsteady Aerodynamics of a Ducted Fan Unmanned Aerial Vehicle in Hovering" Aerospace 9, no. 6: 318. https://doi.org/10.3390/aerospace9060318