3.1. Wake and Flow Structures Analysis of Coaxial Rotor in Step Descent
One of the most specific features of the VRS modes is the structure of the flow around the rotor. First of all, this is the formation of an “air body” around the rotor with a powerful circulating flow inside. The first high quality results of smoke visualization of the rotor flow structure in the VRS modes were obtained in 1949 and presented in [
9]. However, experimental visualization of the flow around the rotor in the VRS modes has been, for a long time an extremely difficult technical challenge. In recent years, great progress has been achieved in this area with the use of experimental methods of PIV visualization of flows [
19,
20]. Modern methods of numerical modeling also have wide opportunities to study the rotor flow structure, vortex wake shapes and velocity fields [
22,
23,
24,
25,
26,
27,
28]. Such methods include the free wake model used in the presented study.
Figure 5,
Figure 6 and
Figure 7 show the results of visualization of the flow around the rotor obtained by the free wake model for the angles of attack of the rotor α
R = 70, 50 and 30°. Each figure shows the three most characteristic operating modes of the rotor corresponding to different vertical descent speeds
Vy. These operating modes have been identified by a comprehensive analysis of the rotor’s aerodynamic characteristics on the whole studied modes set. The first is the most intensive “peak” VRS mode. The second is one of the TWS modes, which follows the VRS modes with an increase in descent speed. The third is the “autorotation” mode, when the rotor rotates due to an external incoming flow without using the power of the power plant. In this case, the total torque of the coaxial rotor is zero
CQURΣ = 0.
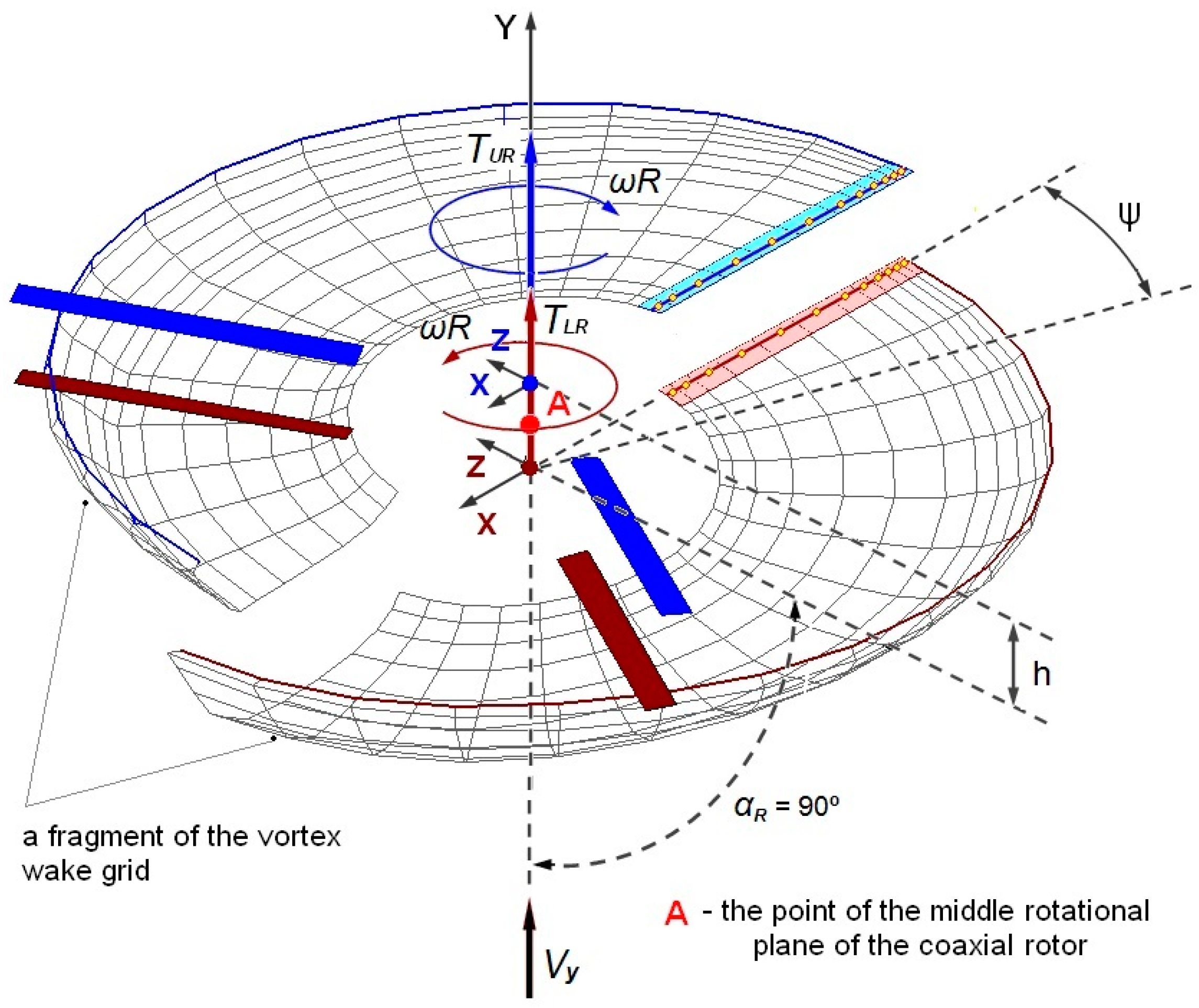
Visualization of the vortex wake shapes has been performed using blade tip vortices trajectories. Other elements of the vortex wake have been hidden. Thus, the picture becomes clearer for visual analysis. The structure of the flow around the rotor has been shown using streamlines. Streamlines have been built for a fixed time moment in the projection on the oXY plane (see
Figure 2). In addition to the streamlines, velocity fields have also been presented.
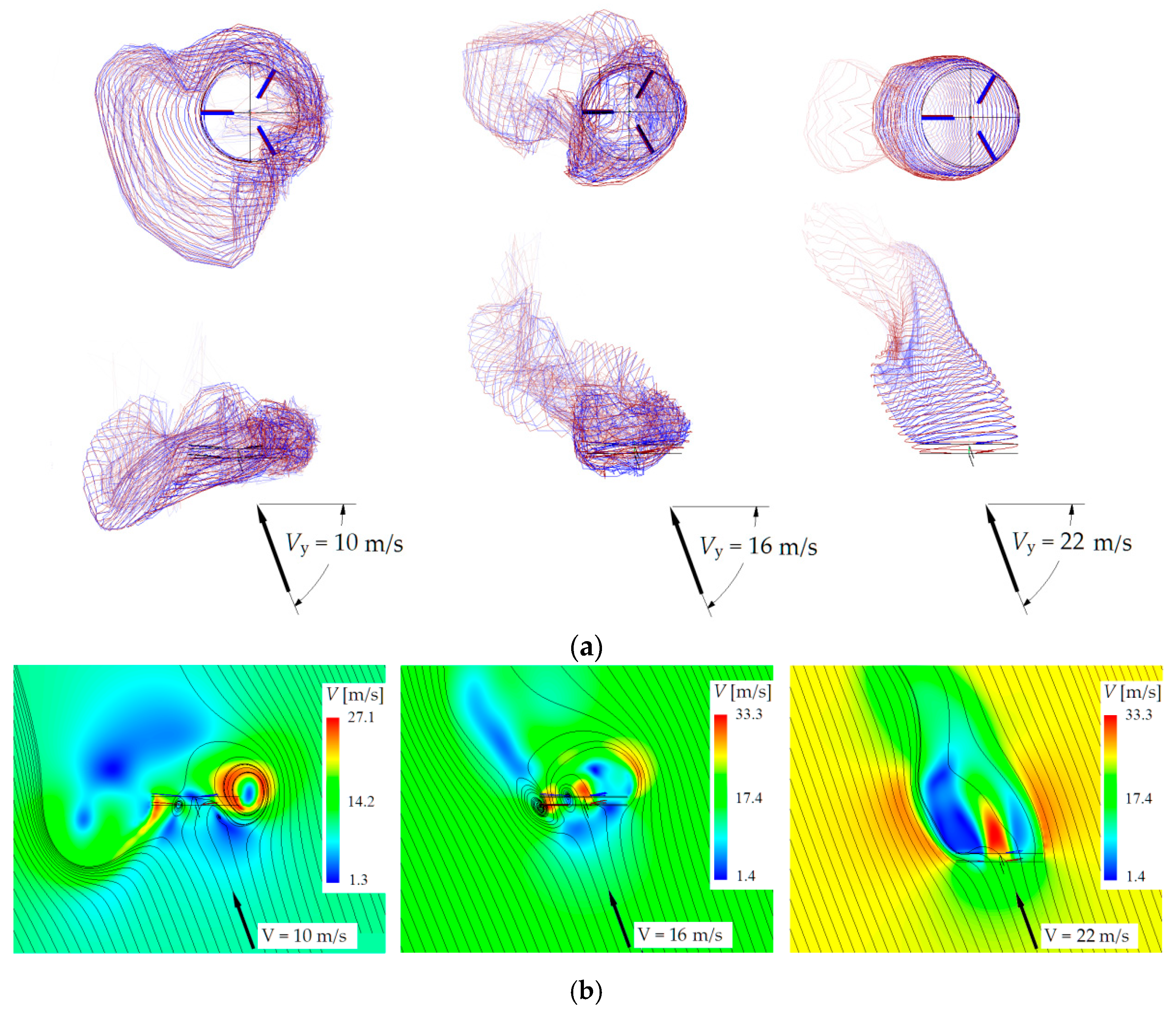
Figure 5 shows the vortex wake shapes and rotor flow structures for α
R = 70°. The following characteristic operating modes are presented:
Vy = 10 m/s (VRS mode),
Vy = 16 m/s (TWS mode) and
Vy = 22 m/s (“autorotation” mode). The characteristic vertical descent rates
Vy have less values than for vertical descent (at α
R = 90° characteristic vertical descent rates were
Vy = 12, 18 and 23 m/s, respectively [
29]). As with α
R = 90°, an “air body” with a circulating flow inside is formed around the rotor in the VRS and TWS modes. However, the flow structure is complicated due to its asymmetry relative to the oY axis. In this case, the flow structure becomes asymmetric not only when viewed from the side, but also when viewed from the top. This asymmetry is especially clearly visible in the vortex wake shapes visualization for
Vy = 10 m/s and
Vy = 16 m/s (
Figure 5a,b). In addition, the front side of the wake maintains a clear structure and the back side is blurred. This is clearly seen in the “vortex ring” mode (
Figure 5a,
Vy = 10 m/s). Thus, the wake structure in these modes is a “half-vortex-ring”. Another feature is related to the rotor flow structure.
Figure 5a,b shows that vortex wake and “air body” are inclined relative to the rotor’s rotational plane and are perpendicular to the incoming flow. This feature is also observed at the other steep descent modes discussed below.
Figure 5.
Free vortex wake shapes (a) and flow (b) around the rotor visualization at αR = 70°.
Figure 5.
Free vortex wake shapes (a) and flow (b) around the rotor visualization at αR = 70°.
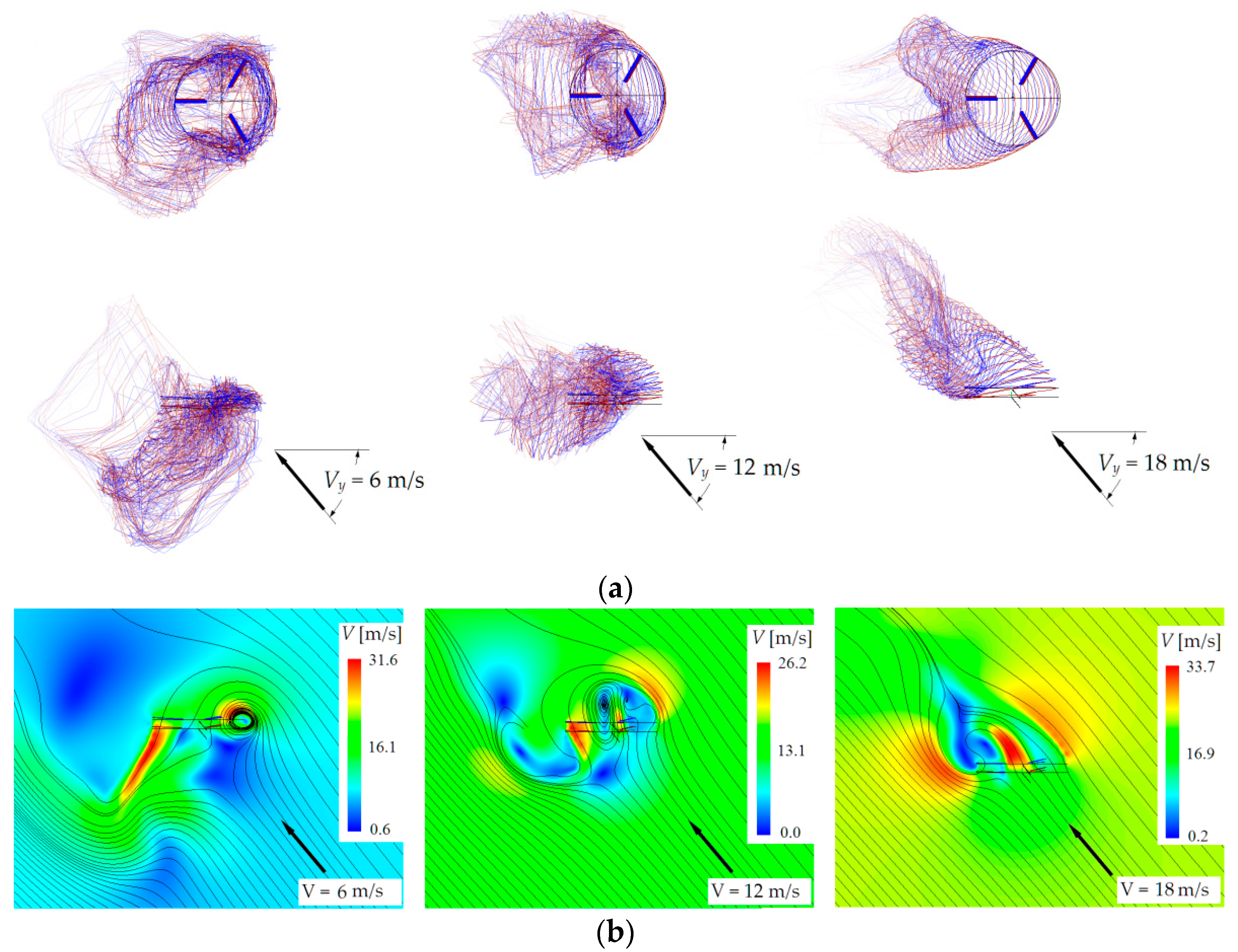
Figure 6 shows the vortex wake shapes and the flow structures for α
R = 50°. The following vertical descent speeds are presented:
Vy = 6 m/s (VRS mode),
Vy = 12 m/s (TWS mode) and
Vy = 18 m/s (“autorotation” mode). The presented “peak” mode of the VRS observed here at the
Vy value is less than half of what it is at α
R = 90° [
29]. It can be seen that, at
Vy = 6 m/s (
Figure 6a), the structure of the vortex wake and the flow structure significantly differ from those observed at the α
R = 90° [
29] and α
R = 70°. There is no clear “air body” around the rotor (
Figure 6b,
Vy = 6 m/s). In the front of the rotor, there is a concentration of the vortex wake in the “half-ring”, located directly in the rotor’s rotational plane (
Figure 6a,
Vy = 6 m/s, top view). This vortex structure causes a powerful circulating flow in the front side of the rotor (
Figure 6b,
Vy = 6 m/s). On the back side of the rotor, the vortex wake is blurred. There is no concentrated circulating flow, and the flow from the rotor is directed downward, almost as in the hovering mode [
29]. Thus, the front and back sides of the rotor actually work in different flow conditions. At
Vy = 12 m/s, even more complex flow structures are observed in the TWS mode (
Figure 6a,b,
Vy = 12 m/s). A few circulating zones are located near the plane of rotation of the rotors at once. In the “autorotation” mode (
Vy = 18 m/s), the shape of the wake and the structure of the flow are significantly simplified. The vortex wake, going up, has a fairly regular helix shape. A flow braking zone appears behind the rotor. The flow around the rotor has a similar structure to the flow around a “flat plate” with a hole in the middle.
Figure 6.
Free vortex wake shapes (a) and flow around the rotor (b), visualization for αR = 50°.
Figure 6.
Free vortex wake shapes (a) and flow around the rotor (b), visualization for αR = 50°.
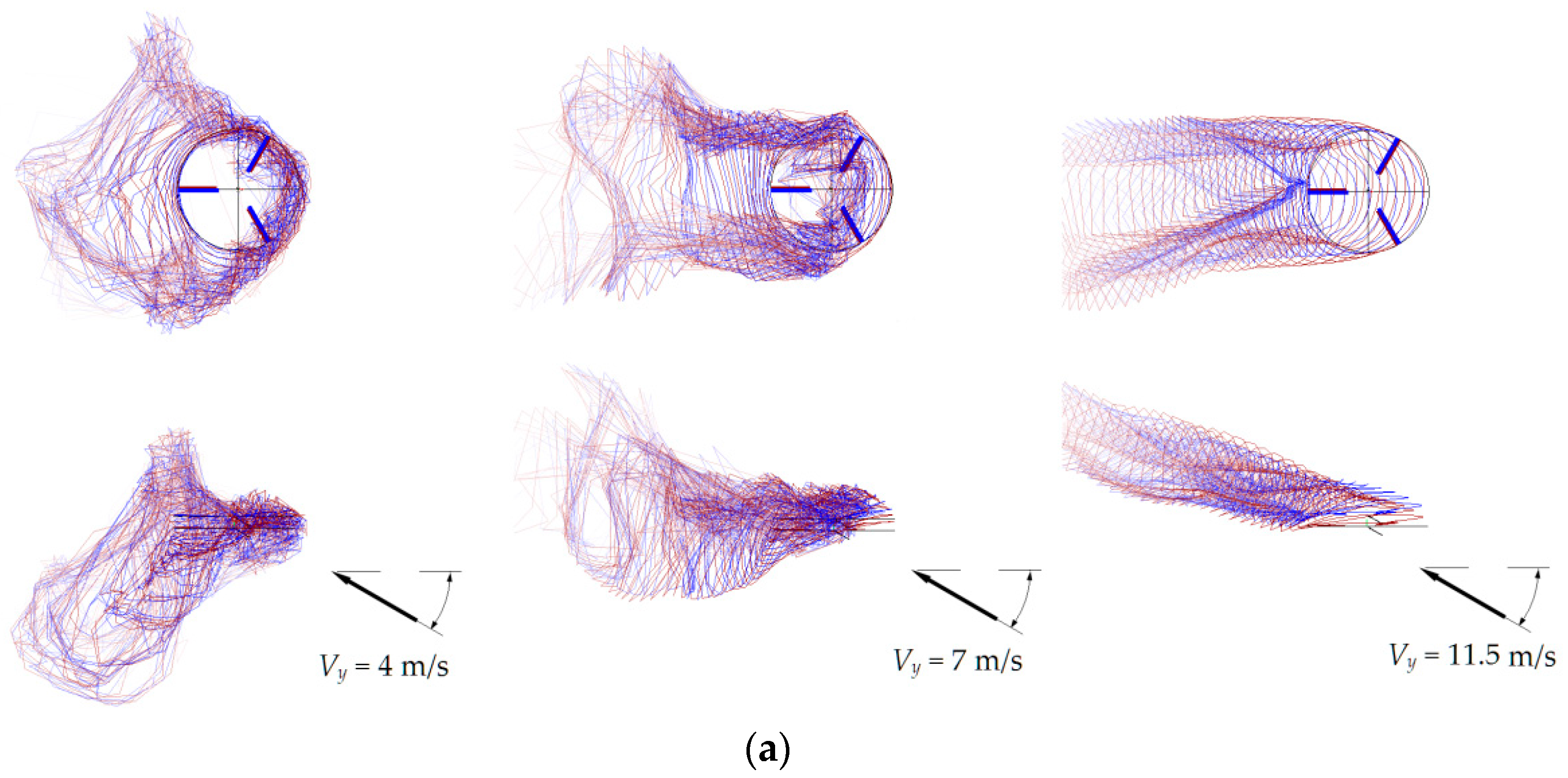
Figure 7 shows the vortex wake shapes and the flow structures for α
R = 30°. Here, are presented the following velocities of descent:
Vy = 4 m/s (VRS mode),
Vy = 7 m/s (TWS mode) and
Vy = 11.5 m/s (“autorotation” mode). It can be noted that the features of the flow and vortex wake structures in these modes mostly repeat the features received for α
R = 50°. At the same time, these characteristic modes have been observed at lower vertical descent velocities. For example, the “peak” of the VRS mode has been registered here at the value of
Vy = 4 m/s, which is three times less than at α
R = 90° [
29] and almost two times less than at α
R = 70°.
Figure 7.
Free vortex wake shapes (a) and flow (b) around the rotor, visualization for αR = 30°.
Figure 7.
Free vortex wake shapes (a) and flow (b) around the rotor, visualization for αR = 30°.
The vortex wake shapes and the flow structures at the VRS and TWS modes shown in
Figure 5,
Figure 6 and
Figure 7 have been constructed for a fixed moment in time. However, the flow around the rotor and its vortex wake in these modes are significantly unsteady. The vortex wake structure changes over time in its shape, size and position relative to the rotor’s rotational plane. The unsteadiness of the flow around the rotor causes significant pulsations of aerodynamic loads (including total thrust and torque). These pulsations are observed both in experiments [
11,
12,
13,
14] and calculations [
22,
23,
24,
25,
26,
27] and are one of the main features of the VRS modes. The total aerodynamic characteristics of the rotor and their unsteady pulsations will be presented and discussed below.
3.2. Coaxial Rotor’s Thrust and Torque Coefficients’ Time-Dependencies in Steep Descent
The analysis of the total aerodynamic characteristics of the rotor, such as thrust and torque coefficients, is one of the main sources for studying the VRS modes and determining their boundaries in the “Vx–Vy” coordinates.
Presented below, in
Figure 8,
Figure 9,
Figure 10 and
Figure 11, are the calculated dependencies of the thrust and torque coefficients on the number of the rotor’s revolutions n:
CT = f(n) and
CQ = f(n) for α
R = 70, 50 and 30°. These dependencies are demonstrated for the modes discussed in
Section 3.1. For comparison, diagrams in
Figure 8,
Figure 9,
Figure 10 and
Figure 11 also include the total thrust and torque coefficients in the hovering mode (red dotted lines). Since the coaxial rotor is considered, thrust and torque dependencies are given both for the UR and LR separately and their sum in total. For the UR and LR, the averaged dependencies of
CT and
CQ are given. For the total curves
CT(UR+LR) and
CQ(UR+LR), in addition, instantaneous pulsations are presented. The instantaneous thrust and torque pulsations at hover and high descent rate
Vy (“autorotation” and WBS modes) have a frequency of ≈30 Hz. They are associated with interference between the UR and LR blades [
29]. The instantaneous thrust and torque pulsations in the VRS and TWS modes have two–three times greater amplitude than in hovering. They have an irregular character due to the unsteady flow around the rotor and are mainly associated with the rotation of blades inside a complex asymmetric vortex wake structure [
29]. Instantaneous thrust and torque pulsations in the VRS modes have a frequency of about ≈15 Hz and, therefore, form continuous regions on the given graphs. Due to the high frequency, instantaneous pulsations form solid areas in the diagrams, colored in light green.
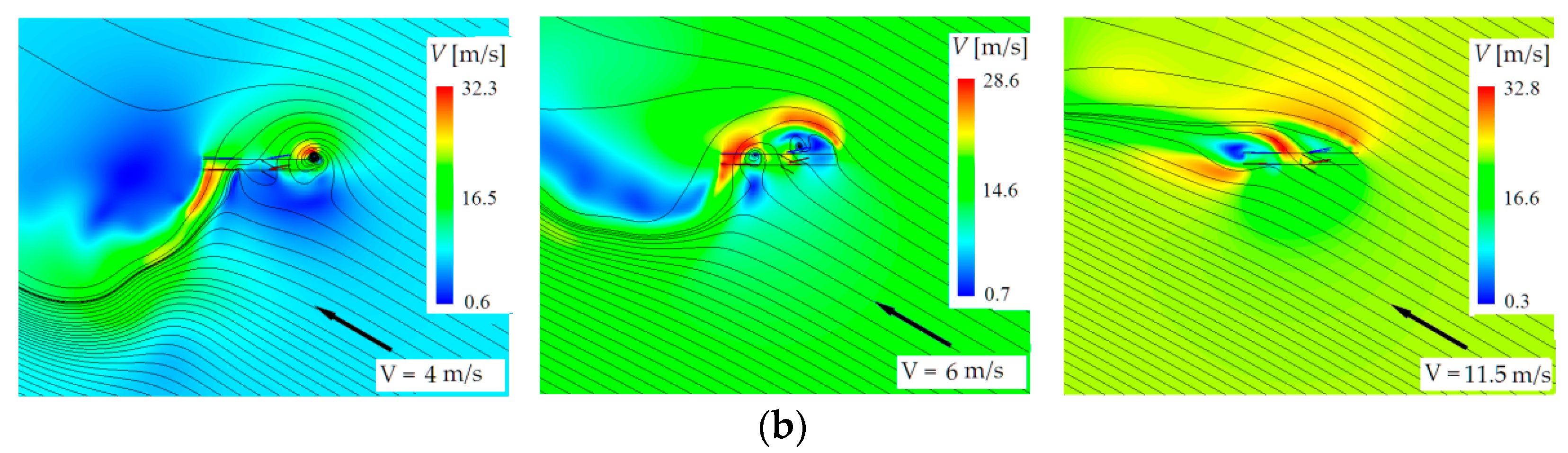
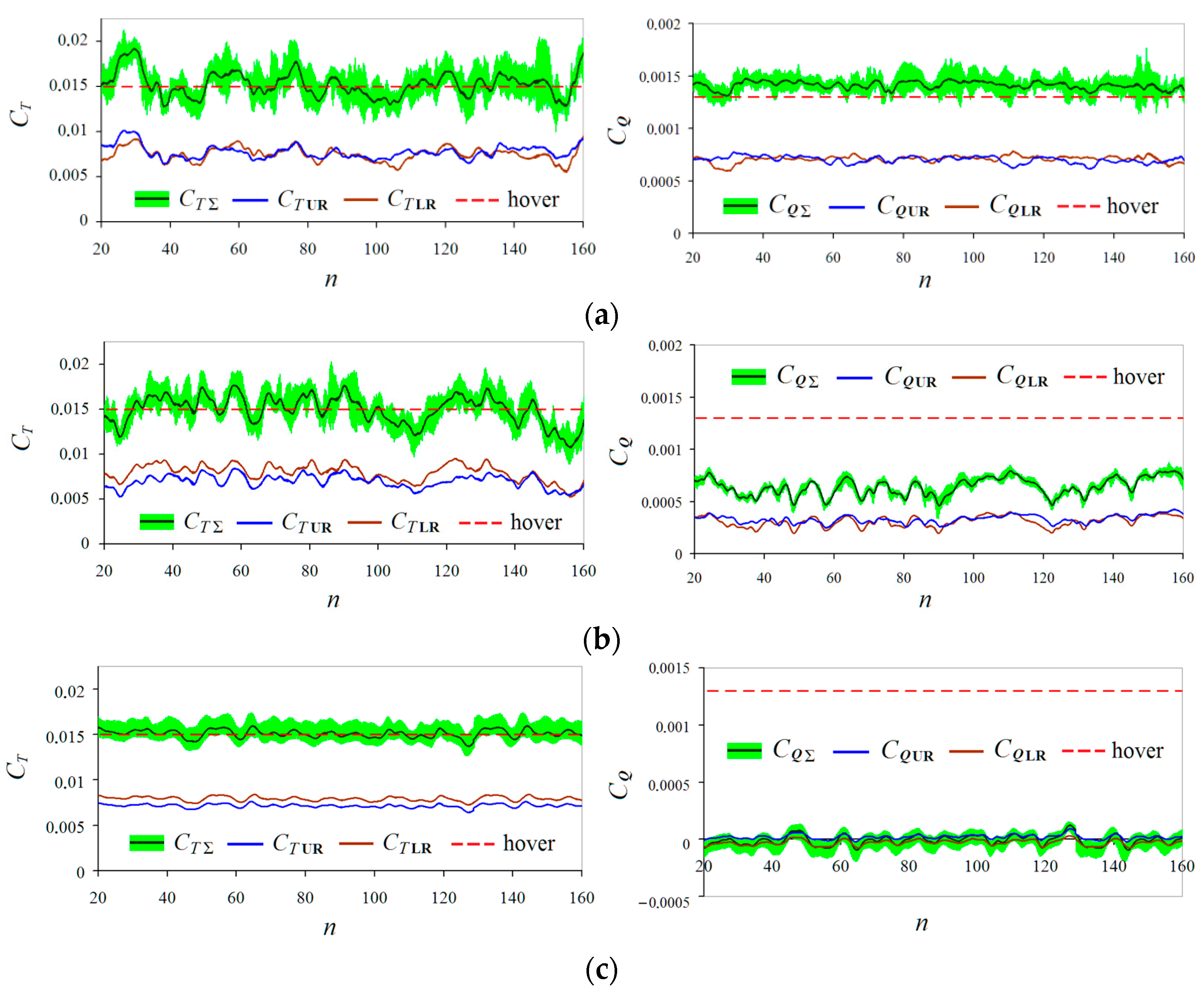
Figure 8 shows the dependencies of
CT = f(n) and
CQ = f(n) obtained at α
R = 70° for velocities
Vy = 10 m/s (VRS mode),
Vy = 16 m/s TWS mode) and
Vy = 22 m/s (“autorotation” mode). Unsteady pulsations of averaged thrust and torque coefficients with a period of several rotor’s revolutions as well as high-frequency pulsations of their instantaneous values are observed. These pulsations are the most significant at the VRS (
Figure 8a) and TWS (
Figure 8b) modes. It can be noted that, in the VRS mode at α
R = 70°, the amplitude of thrust pulsations increases and the pulsation period decreases compared to α
R = 90° [
29]. In the “autorotation” mode (
Figure 8c), the thrust and torque pulsations are less significant than in the VRS and TWS modes, and the total torque of the coaxial rotor is zero. It can also be noted that, in the VRS (
Figure 8a) and TWS (
Figure 8b) modes, the torque of the upper and lower rotors are balanced. Moreover, it follows from the diagrams
CT = f(n) in
Figure 8 that the time-averaged (averaged over number of n) thrust coefficient values for each of the modes are constant and amount to
CTΣ ≈ 0.015. As it has been mentioned above, this is achieved by selecting the appropriate blade pitch angles (see
Figure 4).
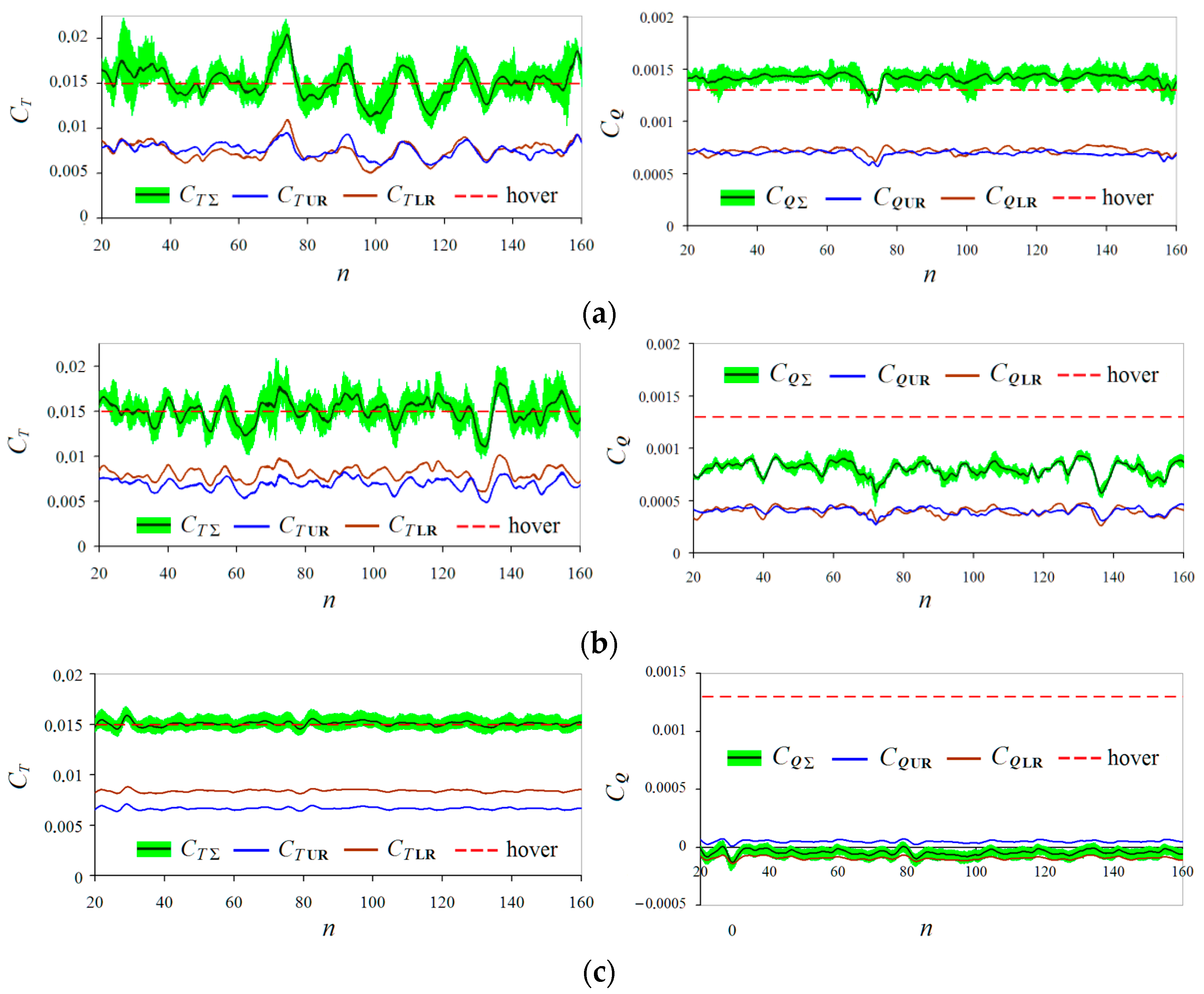
Figure 9 and
Figure 10 demonstrate, similar to the diagrams in
Figure 8, dependencies for the angles of attack α
R = 50 and 30°. At α
R = 50° (
Figure 9a) and α
R = 30° (
Figure 10a), the amplitude of the pulsations continues decreasing and the pulsations become more complex and aperiodic. In the TWS modes, the amplitude of thrust pulsations decreases with a decrease in the angle of attack of the rotor α
R (
Figure 9b and
Figure 10b). The torque pulsations in the TWS modes for all angles of attack of the rotor (
Figure 8b,
Figure 9b and
Figure 10b) have greater amplitudes than in the VRS modes. At the “autorotation” modes, small pulsations of the rotor thrust and torque are observed at all considered angles of attack of the rotor, except at α
R = 30° (
Figure 10c). The increase in the rotor torque observed in the VRS modes (see
Figure 8a,
Figure 9a and
Figure 10a) is relative to the hovering mode at a fixed thrust and has the following values: 111% at α
R = 70°; 108%, at α
R = 50°; 103% for α
R = 30°.
Thus, from the analysis of the dependencies
CT = f(n) and
CQ = f(n) for α
R = 30–70° in
Figure 8,
Figure 9 and
Figure 10, it follows that, with a decrease in the angle of attack of the rotor α
R, the characteristic indication (criteria) for the VRS modes weakens significantly: the amplitudes of the thrust and torque pulsations decrease; the rise in the rotor torque (required power) in comparison with the hovering mode becomes less.
The analysis of the rotor’s aerodynamic characteristics at all ranges of vertical descent velocities
Vy and at all considered angles of attack of the rotor (including the data of work [
29]) makes it possible to determine the boundaries of the VRS modes in the coordinates “
Vx–Vy”.
3.3. Total Aerodynamic Characteristics of the Rotor Analysis
It is known that the descent of a helicopter in the VRS area at a fixed rotor blade pitch angle can lead to a drop in the rotor thrust. This criterion is often used when analyzing the boundaries of the VRS area in experimental [
7,
12,
15,
20] and numerical [
26,
28] studies. Maintaining a constant thrust of the rotor by increasing the blade pitch angles leads to an increase in the rotor torque (power consumption). In this paper, studies of the steep descent modes of the coaxial main rotor have been performed under the condition of a fixed time-averaged total thrust value
CTΣ ≈ 0.015 = constant. This made it possible to estimate the increase in the rotor torque compared to the hovering mode, which is very important and significant for practical results.
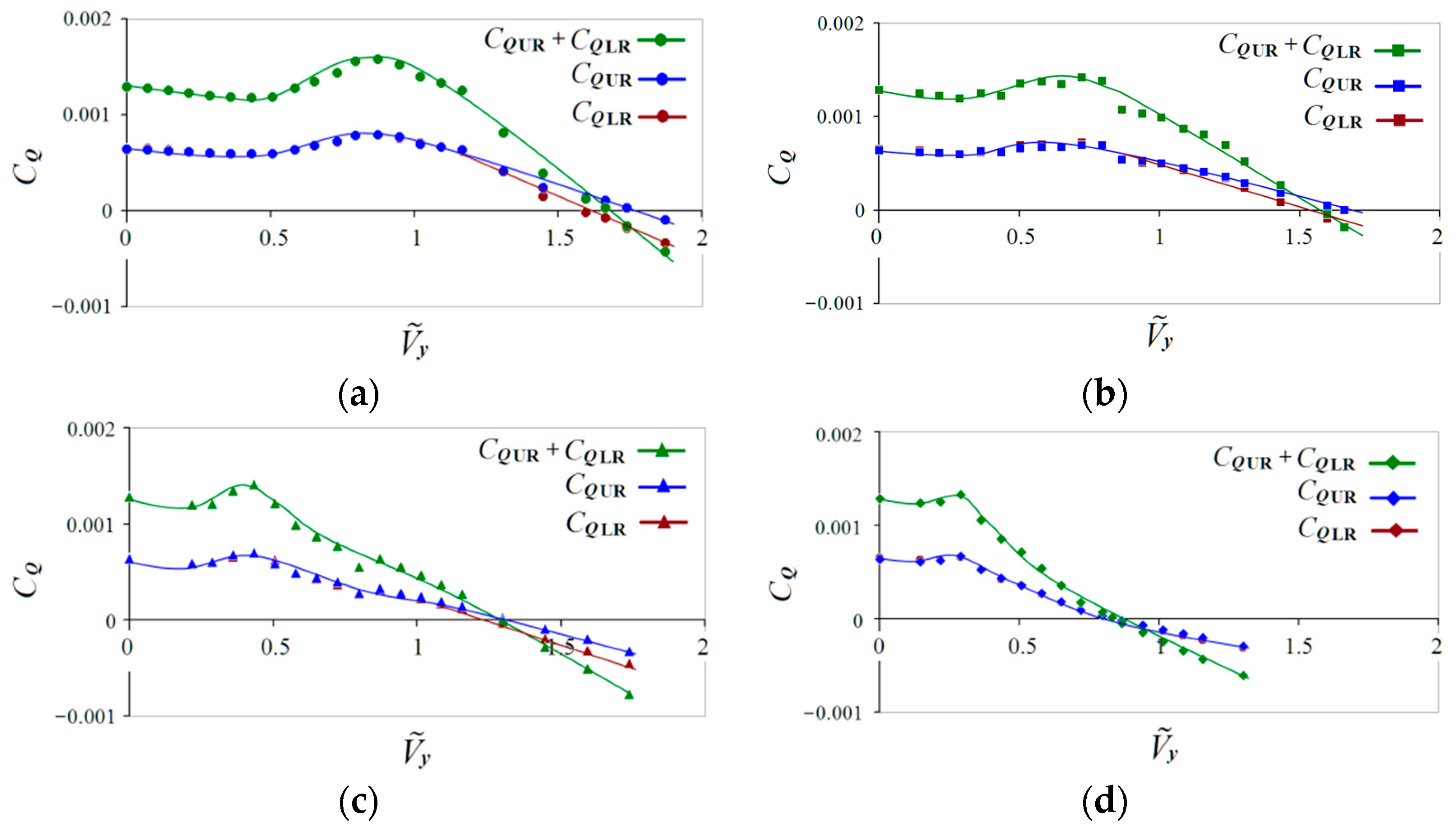
In
Figure 11, for the angles of attack of the rotor
CQΣ/
CQΣh = 90, 70, 50 and 30°, the separate dependencies of the torque coefficients of upper
CQUR and lower
CQLR rotors and total torque
CQΣ on the non-dimensional vertical descent speed
are presented. Here,
is the vertical descent speed
Vy, related to the induced velocity in the hovering mode:
y. The data used for α
R = 90° (
Figure 11a) had been previously obtained in [
29]. The data for α
R = 70, 50 and 30° (
Figure 11b–d) have been obtained in the presented study. In the VRS modes, a characteristic increase in the rotor’s torque is relative to the hovering mode. It can also be seen from the diagrams in
Figure 11 that, with a decrease in the angle of attack of the rotor, the non-dimensional vertical rate of descent
associated with the “autorotation” mode (
CQΣ = 0) at first occurs slightly, and then sharply decreases. For α
R = 90° and α
R = 70°, these velocities are close and equal to
≈ 1.66 and
≈ 1.6, respectively. At α
R = 50°,
≈ 1.23 (22% less), and at α
R = 30°, the speed of “autorotation”
≈ 0.83, which is almost two times less than at α
R = 70°. In addition, from
Figure 11a–d, it follows that the use of obtained blade pitch angles laws (see
Figure 3) made it possible to balance the coaxial rotor in torque (
CQUR =
CQLR) almost over the entire range of the
Vy speeds except the “autorotation” modes. The analysis of the VRS boundaries according to the criterion of rotor torque (power) growth (
CQΣ/
CQΣh > 1) will be given below.
Figure 11.
Dependencies of the UR, LR and total (UR + LR) torque coefficients CQ vs. non-dimensional vertical descent speed at αR = 30–90°. (a) αR = 90°; (b) αR = 70°; (c) αR = 50°; (d) αR = 30°.
Figure 11.
Dependencies of the UR, LR and total (UR + LR) torque coefficients CQ vs. non-dimensional vertical descent speed at αR = 30–90°. (a) αR = 90°; (b) αR = 70°; (c) αR = 50°; (d) αR = 30°.
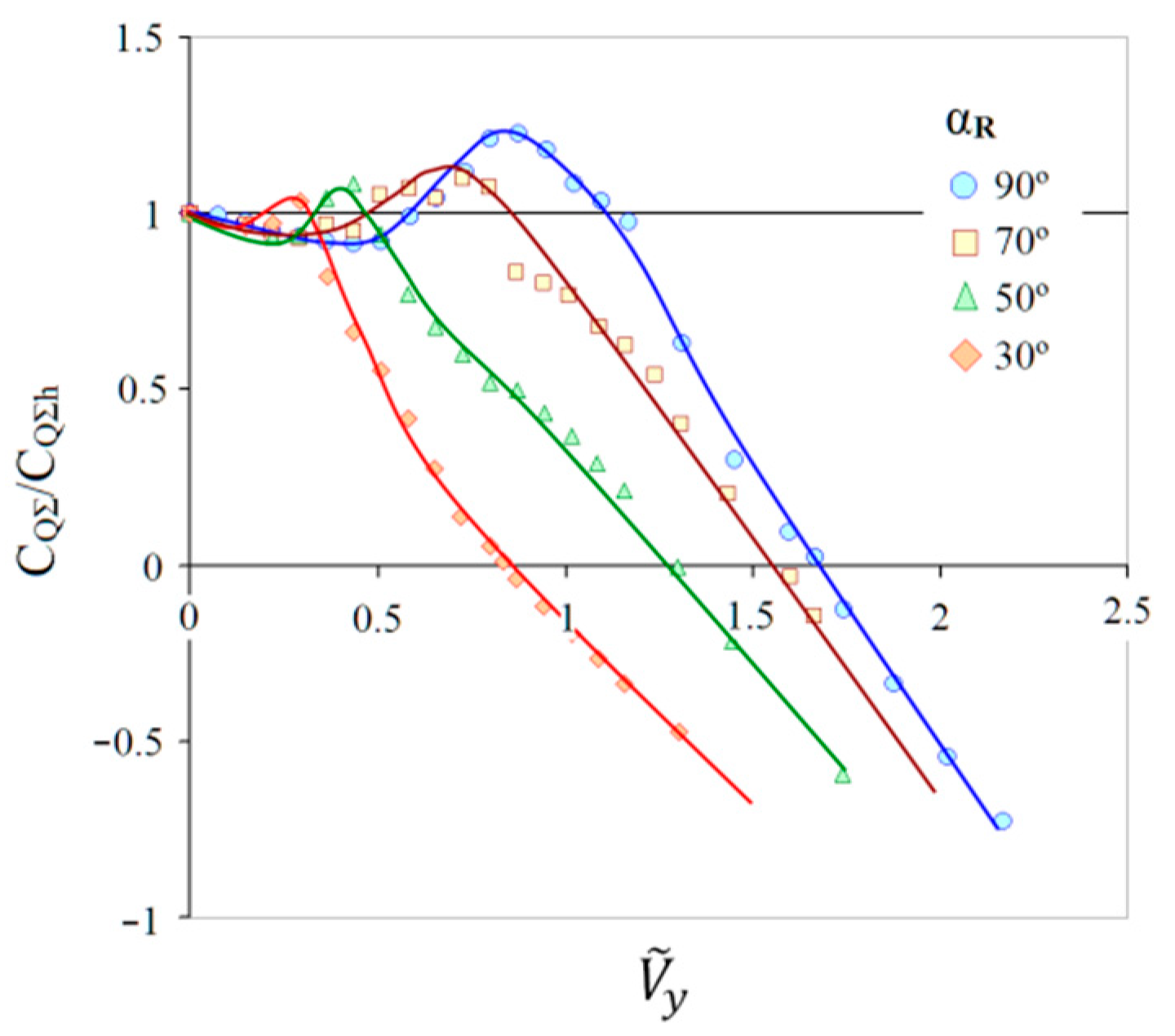
Figure 12 shows the dependencies of relative torque coefficient
CQΣ/
CQΣh on the non-dimensional vertical descent speed
, obtained on the basis of data from
Figure 11. From
Figure 12, it can be seen that, at first, with an increase in the speed
(for all α
R values), a decrease in the relative torque coefficient is observed. This means that the power consumption of the rotor decreases, reaching values of ≈0.92 (at α
R = 90° and
≈ 0.4) from the power in hovering mode. Further, there is an increase in relative torque coefficient
CQΣ/
CQΣh > 1 in a certain range of vertical descent speed
. The region where
CQΣ/
CQΣh > 1 is the region of the VRS modes. With a further increase in vertical descent speed, the relative torque coefficient decreases again. At
CQΣ/
CQΣh = 0, the rotor enters the “autorotation” mode, and at
CQΣ/
CQΣh <0, the rotor enters to the WBS modes. It can be seen from the presented diagrams that the region of the VRS modes decreases significantly with a decrease in the angle of attack α
R, and also shifts to lower values of the vertical descent speed
. For α
R = 90°, the boundaries of the VRS modes according to the
CQΣ/
CQΣh > 1 criterion observed within
≈ 0.6–1.1, for α
R = 70° within
≈ 0.48–0.85, for α
R = 50° within
≈ 0.34–0.48 and for α
R = 30° within
≈ 0.26–0.3. The points of the curves
CQΣ/
CQΣh = f (
) where the coefficients
CQΣ/
CQΣh reach maximum values correspond to the “peak” modes of the VRS. These modes have been analyzed in detail in
Section 3.1 and
Section 3.2 of the article. The maximum increase in the relative torque coefficient reaches 22% (
CQΣ/
CQΣh ≈ 1.22) at α
R = 90° and
≈ 0.87. At α
R = 70° and α
R = 50°, the increase in torque is 11% (
CQΣ/
CQΣh ≈ 1.11) and 8% (
CQΣ/
CQΣh ≈ 1.08), respectively. At α
R = 30°, the increase in torque is about 3% (
CQΣ/
CQΣh ≈ 1.03). Thus, in the descent modes with angles α
R = 70–90°, the signs of the VRS modes and the associated negative outcomes such as an increase in the rotor power consumptions are manifested most strongly.
A characteristic feature of the coaxial rotor in the hovering mode is the unequal distribution of thrust between the LR and UR due to aerodynamic interference. If the UR and LR are torque-balanced, the thrust of the UR is usually 20–25% higher than the thrust of the LR [
7,
31,
32]. In this regard, the distribution of thrust between the rotors in vertical and steep descents is of high interest.
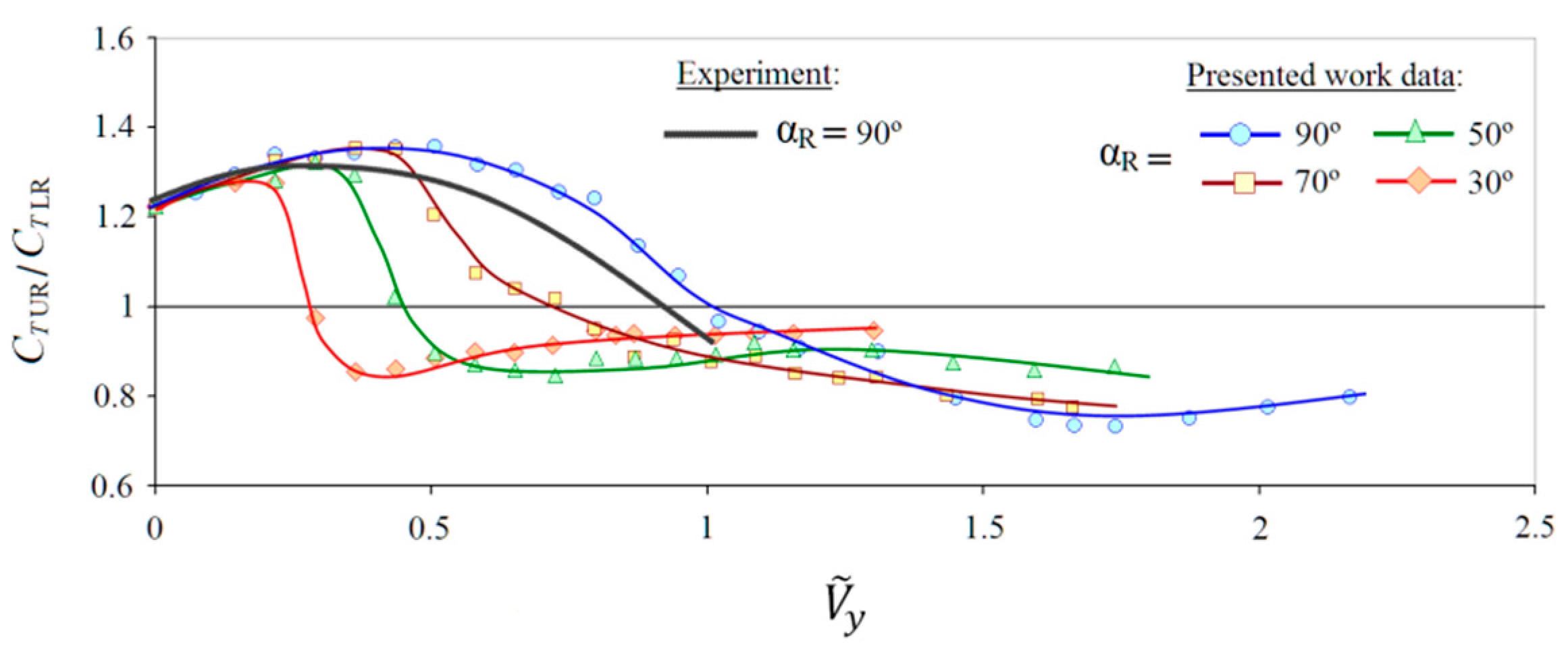
Figure 13 shows the dependencies of the ratio between UR and LR thrust
CTUR/
CTLR = f(
) for α
R = 30–90°. In the hovering mode, the
CTUR/
CTLR ≈ 1.22 [
29]. Further, in a certain range of vertical descent speeds
, the value of the
CTUR/
CTLR gradually increases to values of 1.3–1.4. With an increase in the speed of
, when the rotor falls into the VRS modes area, the value of the
CTUR/
CTLR sharply decreases and reaches the value of the
CTUR/
CTLR ≈ 1 in the “peak” modes of the VRS. After that, with a further increase in the speed
, the ratio of the thrust of the UR and LR changes—the thrust of the lower rotor becomes higher than the thrust of the UR. In addition,
Figure 13 shows the
CTUR/
CTLR curve obtained for α
R = 90° in [
7] for
CTΣ/σ = 0.16. There is a satisfactory agreement with the obtained calculation results.
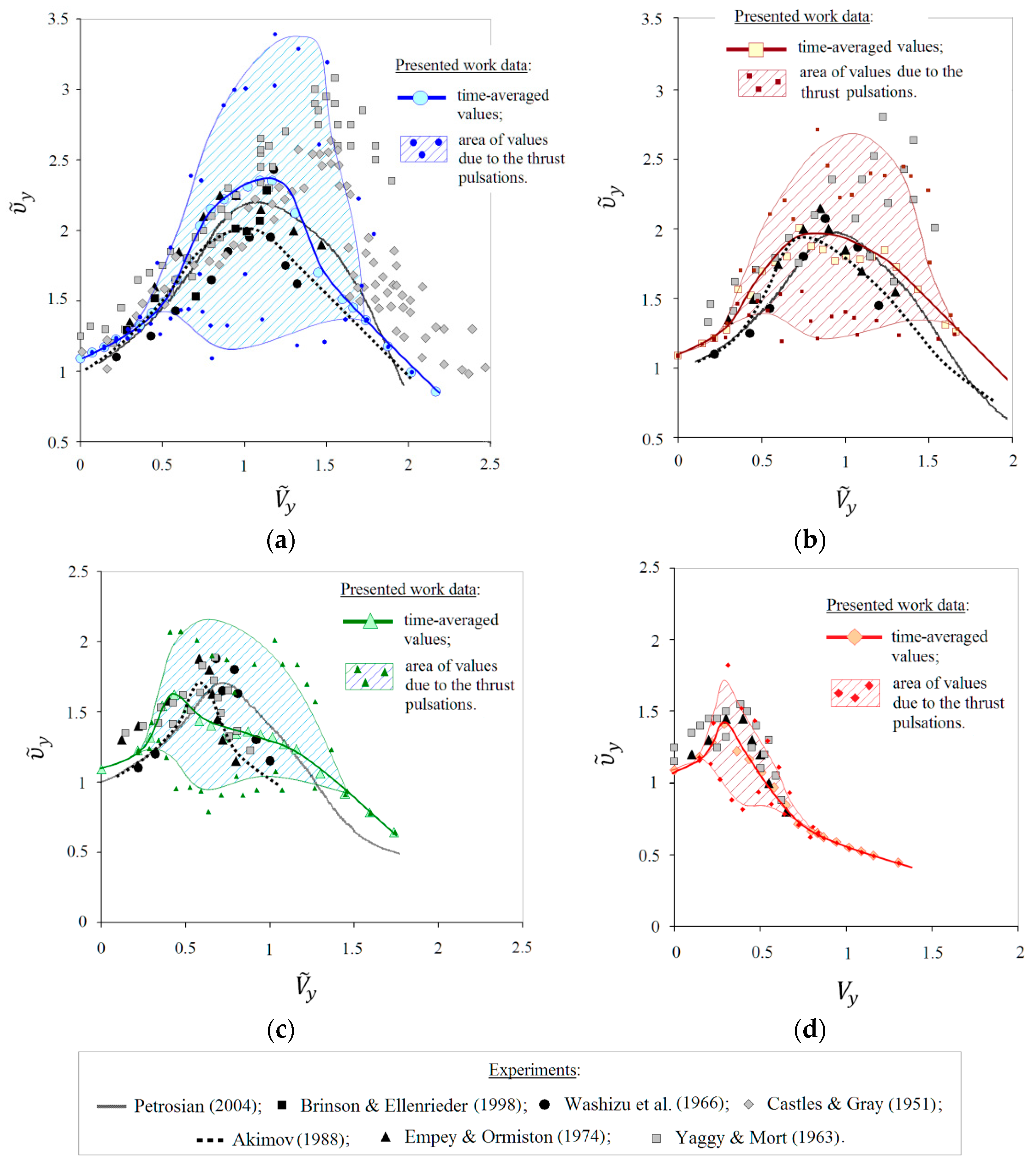
With the increase in the required power in the VRS modes, a significant increase in the induced velocity of the rotor is observed; it reaches two–three times that of the hovering mode. Usually, the results of experimental and numerical studies of the VRS modes include the dependencies of the non-dimensional induced velocity
of the rotor on the non-dimensional vertical descent speed
. Such dependencies for the considered modes are shown in
Figure 14. The dependence of
= f(
) for α
R = 90° (see
Figure 14a) had been previously obtained in [
29], and the dependencies for α
R = 70, 50 and 30° (see
Figure 14b–d) have been obtained in the presented study. Taking into account the thrust pulsations, this diagram can be represented as an area, as shown in
Figure 14. An increase in the induced velocity
above a threshold value can also serve as one of the criteria for the VRS modes boundary. In addition to the calculated curves
= f(
),
Figure 14 also shows a number of experimental dependencies obtained by various authors [
6,
7,
10,
11,
12,
16,
17]. These are experiments performed for different conditions, different types and sizes of rotors and various experimental rigs. In [
7], a model of a coaxial rotor in the WT has been studied, in [
6,
12], a model of a single rotor has been installed on a moving track and, in [
11], rotors with a large blade twist (not typical for helicopter rotors) have been tested. For this reason, the experimental data have significant differences. Nevertheless, for all the angles of attack of the rotor, there is a good qualitative agreement between the calculation and the experimental data. Based on the analysis of the calculated data (
Figure 14), we note that, with a decrease in the angle α
R, the maximum time-averaged value
decreases and shifts to the left. Thus, at α
R = 90°, the non-dimensional induced velocity reaches the value of
≈ 2.3 at
≈ 1 (
Figure 14a), at α
R = 70° of the value of
≈ 2 at
≈ 0.7 (
Figure 14b), at α
R = 50° of the value of
≈ 1.6 at
≈ 0.45 (
Figure 14c), and at α
R = 30° of the value of
≈ 1.4 at
≈ 0.3 (
Figure 14d). The boundaries of the VRS modes for the criterion
> 1.5 observed within the limits are:
≈ 0.7–1.0 at α
R = 90°,
≈ 0.7–1.0 at α
R = 70° and
≈ 0.7–1.0 at α
R = 50°. At α
R = 30°, there is no VRS mode within the selected criterion (
Figure 14d).
One more criterion used to identify the VRS modes and determine their boundaries is the pulsation of aerodynamic loads on the rotor associated with unsteadiness of these modes. This is expressed in unsteady pulsations of the total aerodynamic characteristics of the rotor such as rotor thrust and torque. The relationship of thrust and torque pulsations with unsteady flow around the rotor has been considered above in
Section 3.1 and
Section 3.2 on the example of the most characteristic modes from the VRS area. The dependences of the thrust coefficients
CT = f(n) and the torque coefficients
CQ = f(n), taking into account the pulsations, have been presented in
Figure 8,
Figure 9 and
Figure 10. The analysis of such dependencies allows for estimating the changes in the thrust and torque pulsations for all considered operating modes (
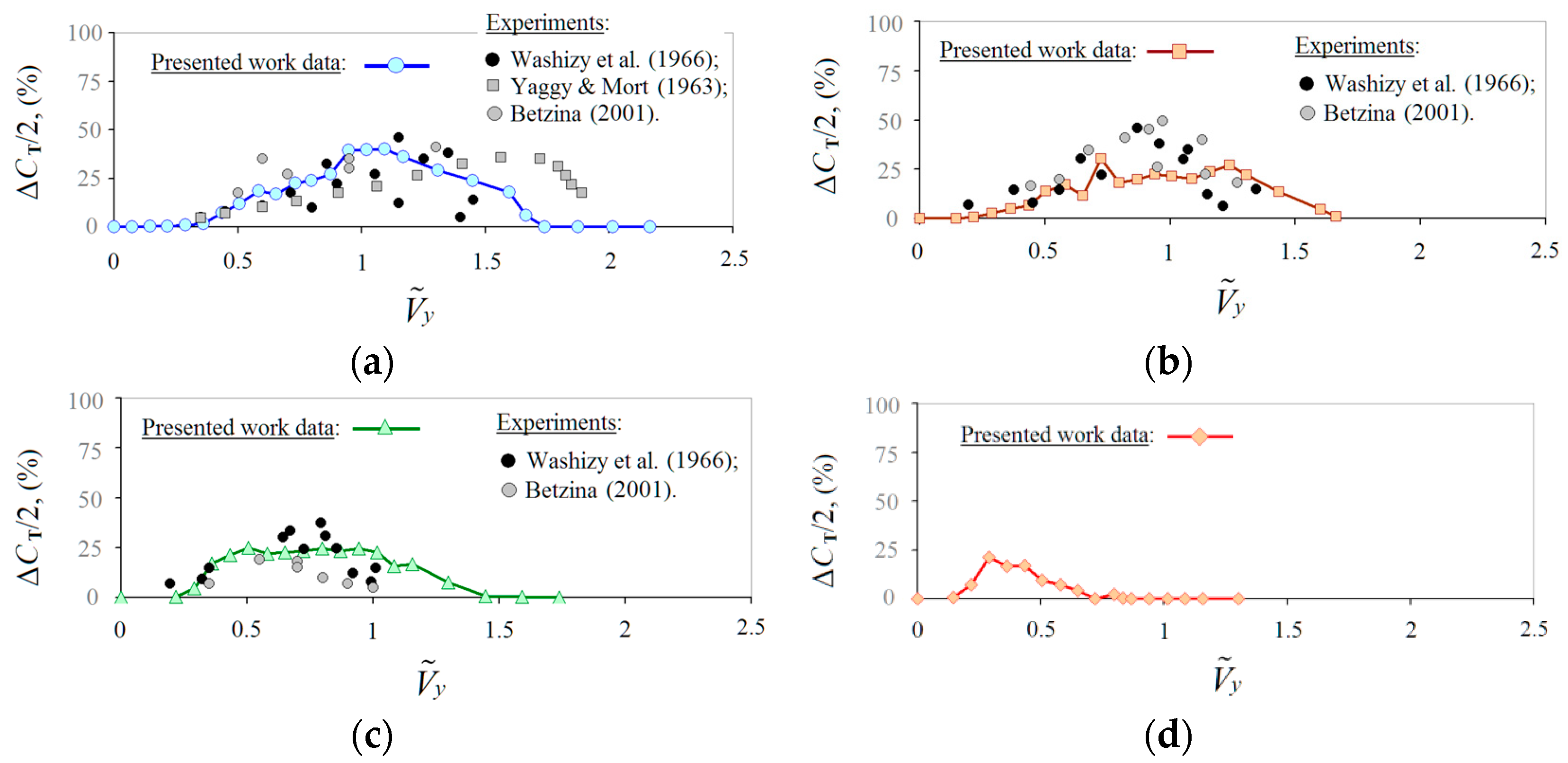
Figure 3). The amplitude of the thrust coefficient pulsations is defined as Δ
CTΣ/2 = (
CTΣmax −
CTΣmin)/2. It is easy to express this as a percentage of the time-averaged thrust, which is equal for all calculated modes
CTΣ ≈ 0.015 = constant. The amplitude of the torque coefficient pulsations is defined as Δ
CQΣ/2 = (
CQΣmax −
CQΣmin)/2. Here, it is expressed as a percentage of the total torque of the rotor in hovering mode.
Figure 15 shows the diagram of rotor thrust coefficient pulsations amplitude Δ
CTΣ/2 = (
) for α
R = 30–90°. Here, in addition to the calculation results, some experimental data [
11,
12,
14] are also given. These data have been obtained for various experimental conditions and various model-scale single rotors. In the introduction section, it has been shown that, nowadays, there is no such published experimental or calculated data for full-scale coaxial rotors. However, there is a satisfactory qualitative agreement between the results of calculations and the experimental data presented. The greatest thrust pulsations are observed at α
R = 90° (
Figure 15a), and they reach an amplitude of Δ
CTΣ/2 = 40% at
≈ 1–1.1. With a decrease in the angle α
R, the amplitude of thrust pulsations decreases significantly and shifts to lower values of
. At α
R = 70° (
Figure 15b), the maximum amplitude of thrust pulsations reaches the value Δ
CTΣ/2 ≈ 30% at
≈ 0.73, at α
R = 50° (
Figure 15c) Δ
CTΣ/2 ≈ 24% at
≈ 0.5 and
≈ 0.95 and at α
R = 30° (
Figure 15d) Δ
CTΣ/2 ≈ 20% at
≈ 0.3. Further, the criterion Δ
CTΣ/2 > 20% has been taken to determine the boundaries of the VRS modes.
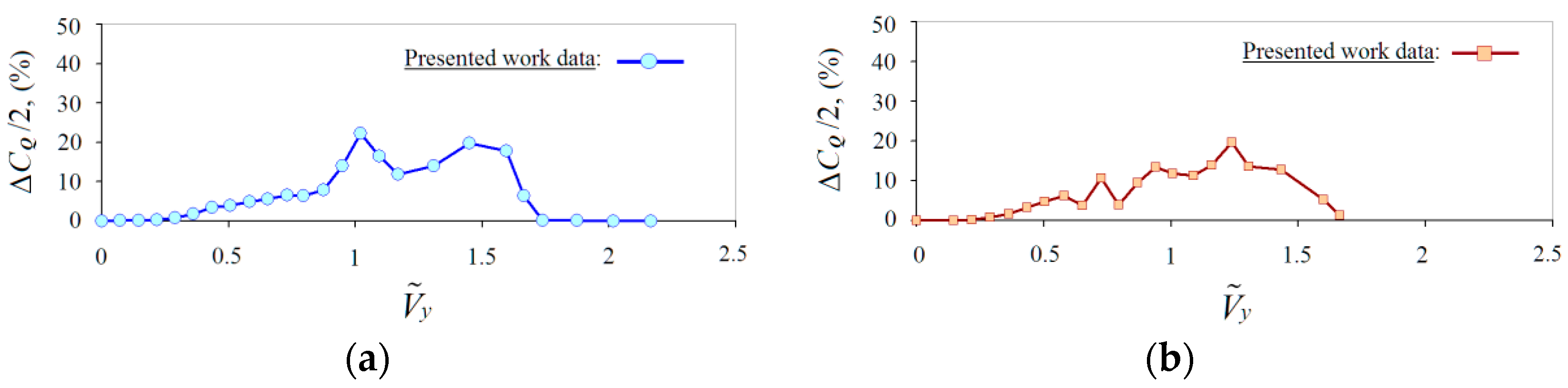
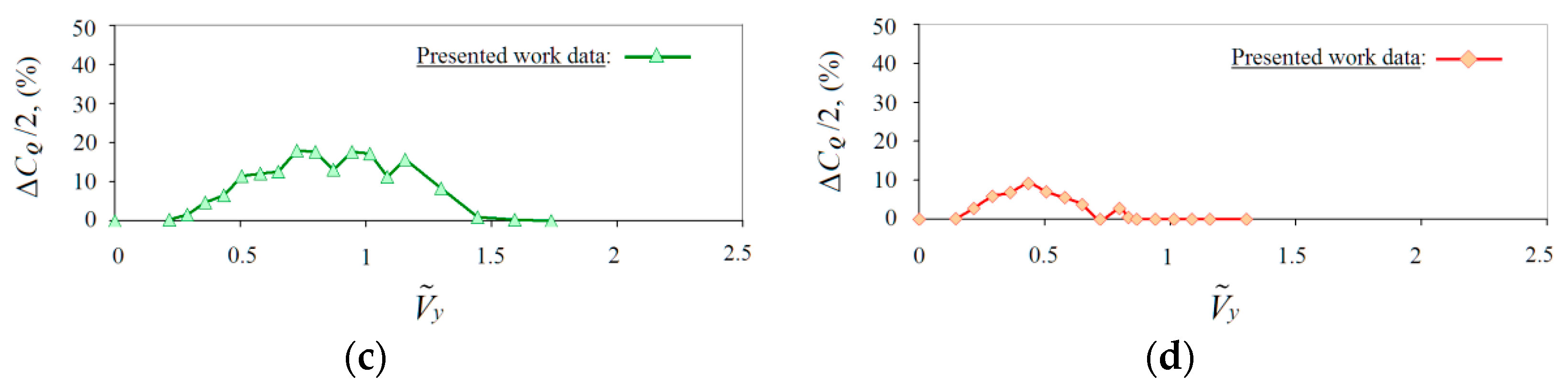
Figure 16 shows the diagram of the rotor torque coefficient pulsations amplitude Δ
CQΣ/2 = (
) for α
R = 30–90°. The largest torque pulsations are observed at α
R = 90° (
Figure 16a) and reach an amplitude of Δ
CQΣ/2 ≈ 22% at
≈ 1. At α
R = 70° (
Figure 16b), the point of the maximum amplitude of the torque pulsations is shifted to the right by the value of vertical descent speed
≈ 1.24, and reaches a value of Δ
CQΣ/2 ≈ 19%. At α
R = 50° (
Figure 16c), the pulsations reach Δ
CQΣ/2 ≈ 18% in the range of
≈ 0.7–1. At α
R = 30° (
Figure 16d), the torque pulsations decrease by almost two times their original value and reach Δ
CQΣ/2 ≈ 10% at
≈ 0.44. Further, the criterion Δ
CQΣ/2 > 10% has been taken to determine the boundaries of the VRS modes.
From the comparison of the diagrams in
Figure 15 and
Figure 16, it can also be concluded that the regions with large pulsations of the rotor torque are significantly shifted to the right at high speeds
relative to the regions with large thrust pulsations.
3.4. Total Aerodynamic Characteristics of the Rotor Analysis
In the final part of the study, the boundaries of the VRS modes area have been obtained on the basis of the criteria formulated and analyzed above in
Section 3.3.
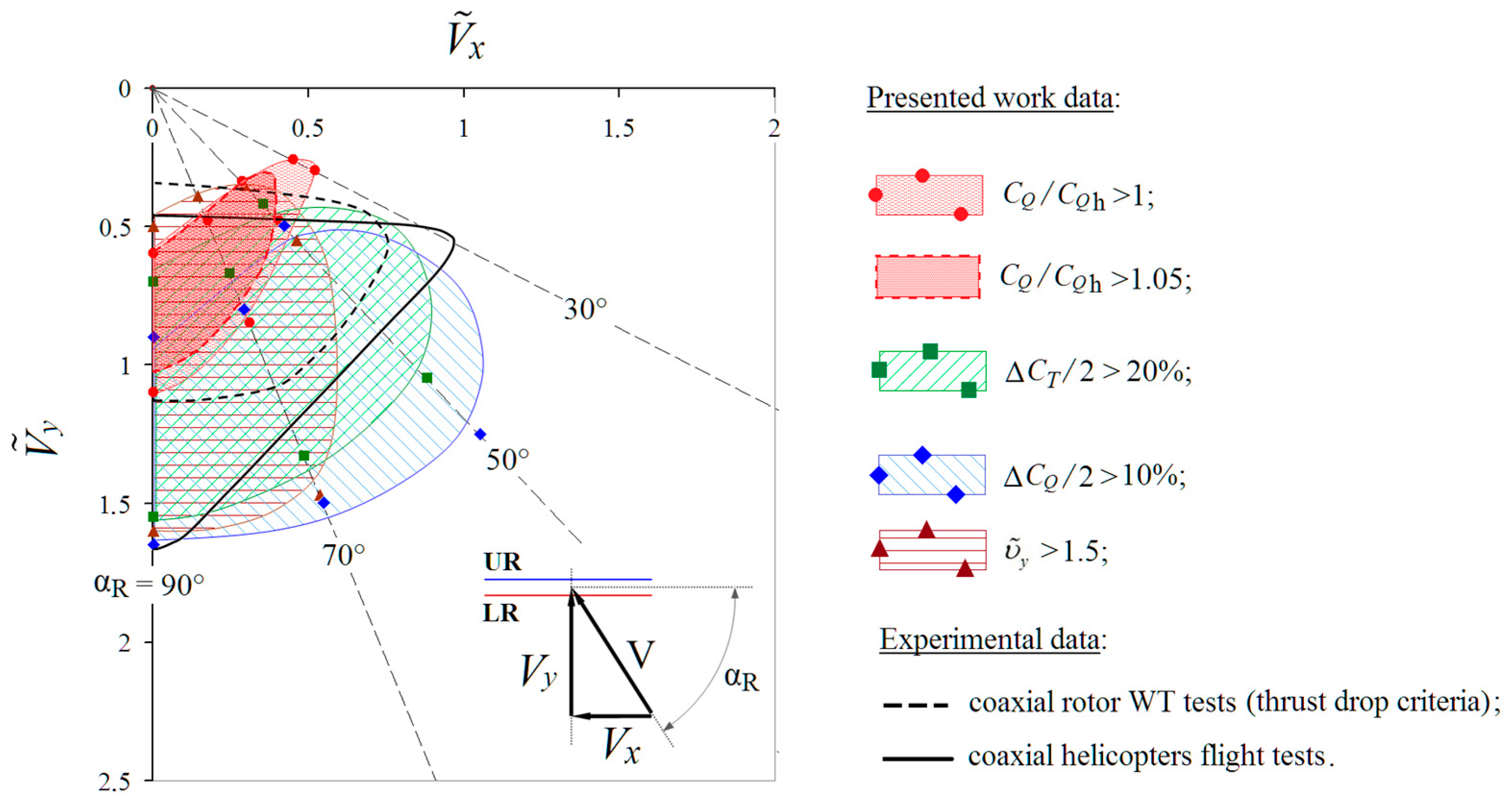
The final diagram with the areas of the VRS modes in non-dimensional flight speed coordinates “
−
” is shown in
Figure 17. The following criteria have been used: an increase in the relative torque coefficient of the rotor (required power)
CQΣ/
CQΣh > 1 and
CQΣ/
CQΣh > 1.05; an increase in the non-dimensional induced velocity
> 1.5; the amplitude of pulsations of the total thrust coefficient Δ
CTΣ/2 > 20% (compared with the average value of
CTΣ ≈ 0.015 = constant); the amplitude of the pulsations of the total torque coefficient Δ
CQΣ/2 > 10% (compared to the total hovering torque). The diagram in
Figure 17 shows that approximate areas with different fills are plotted around the calculated points corresponding to the boundaries of the VRS mode region according to various criteria for various angles α
R = 30–90°.
It should be noted that, when choosing other values for the VRS criteria, the corresponding areas may change. In addition to the calculated areas,
Figure 17 shows two experimental dependencies for a coaxial rotor obtained on the basis of model and flight tests published in [
7]. The first is an experimental curve obtained for a model of a coaxial rotor in WT according to the criterion of thrust drop at a fixed blade pitch angle. The second is the curve obtained on the basis of flight tests of coaxial scheme helicopters. Here, the entry into the area of the VRS modes has been evaluated by the appearance of vibrations, and with a further increase in the rate of descent by shaking and deterioration of the helicopter’s controllability. It can be seen that the calculated upper border of the VRS mode area, obtained by the criterion of thrust and torque pulsation, is close to the experimental boundary, constructed by the criterion of vibrations and shaking of the helicopter. Since the vibrations and shaking of the helicopter are primarily associated with the pulsations of aerodynamic loads on the rotor, we can conclude that there is a satisfactory agreement between the experimental and calculated data. For the lower border, there is a good coincidence of calculations and experiments with a vertical descent (α
R = 90°). For the steep descent modes (α
R = 50–70°), the calculated boundary of the VRS modes according to the criterion of thrust and torque pulsations is significantly lower than the experimental one, and the calculated boundary of the VRS modes according to the criterion of torque growth is satisfactorily consistent with the experimental curve obtained according to the criterion of the thrust drop. At α
R = 30°, the calculated VRS boundary is located at lower rates of descent.
Thus, the boundaries of the VRS modes shown in
Figure 17, according to various criteria, make it possible to assess the areas of occurrence of specific features in the aerodynamic characteristics of the rotor. This fact is extremely important when analyzing the aerodynamics of the rotor in steep descent modes.
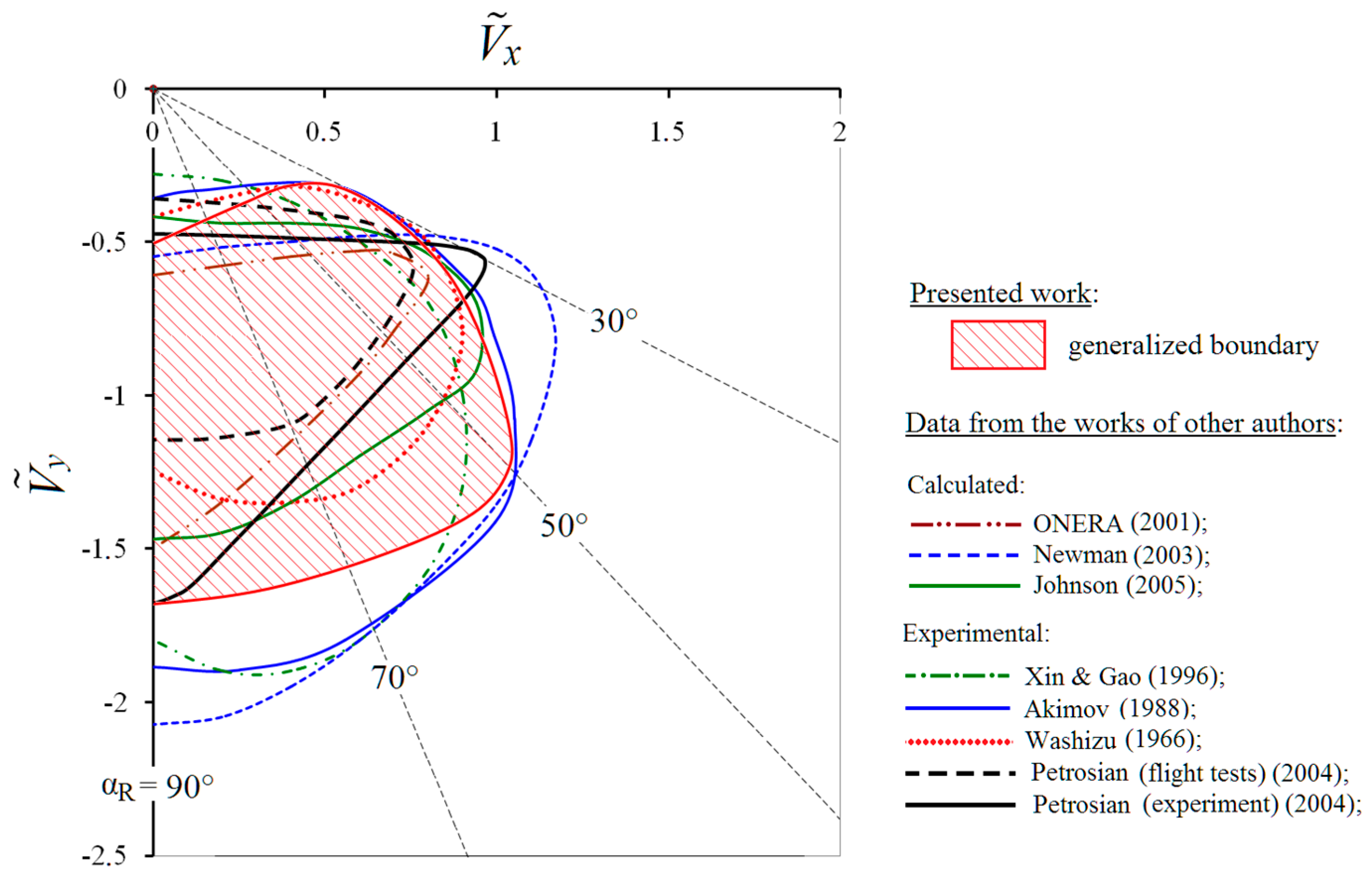
Figure 18 shows a generalized calculated boundary obtained on the basis of a set of VRS boundaries presented in
Figure 17. For comparison, the calculated and experimental VRS boundaries obtained by other authors are also given. It should be noted that the boundaries obtained by different authors are based on various criteria and approaches. The boundaries obtained in the works by Akimov [
6] (flight tests of a single-rotor Mi-8 helicopter) and Petrosian [
7] (flight tests of coaxial helicopters) are built on the basis of flight tests by interpreting the experience of pilots, such as: increased vibrations, shaking and difficulties in controlling the helicopter. The boundary presented in [
7] (experimental) is obtained on the basis of experiments of a coaxial rotor in WT. The boundaries obtained in the works by Washizu et al. [
12] and Xin and Gao [
13] have been obtained on the basis of the analysis of the pulsations of the rotor thrust during experimental studies. The boundary obtained in the work by Newman et al., presented in [
21], is obtained on the basis of the analysis of the vortex wake. The boundary obtained by Johnson [
21] is based on the developed dynamic model. The boundary presented in [
8] is based on numerically simulating a flight experiment for a single-rotor Dauphin helicopter.
In general, it can be noted that there is a good qualitative coincidence of the generalized boundary obtained in the presented research.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}