
Image Quality Enhancement with Applications to Unmanned Aerial Vehicle Obstacle Detection


Abstract
:1. Introduction
- (1)
- Vision-based positioning method [5];
- (2)
- Vision-based autonomous UAV landing [6];
- (3)
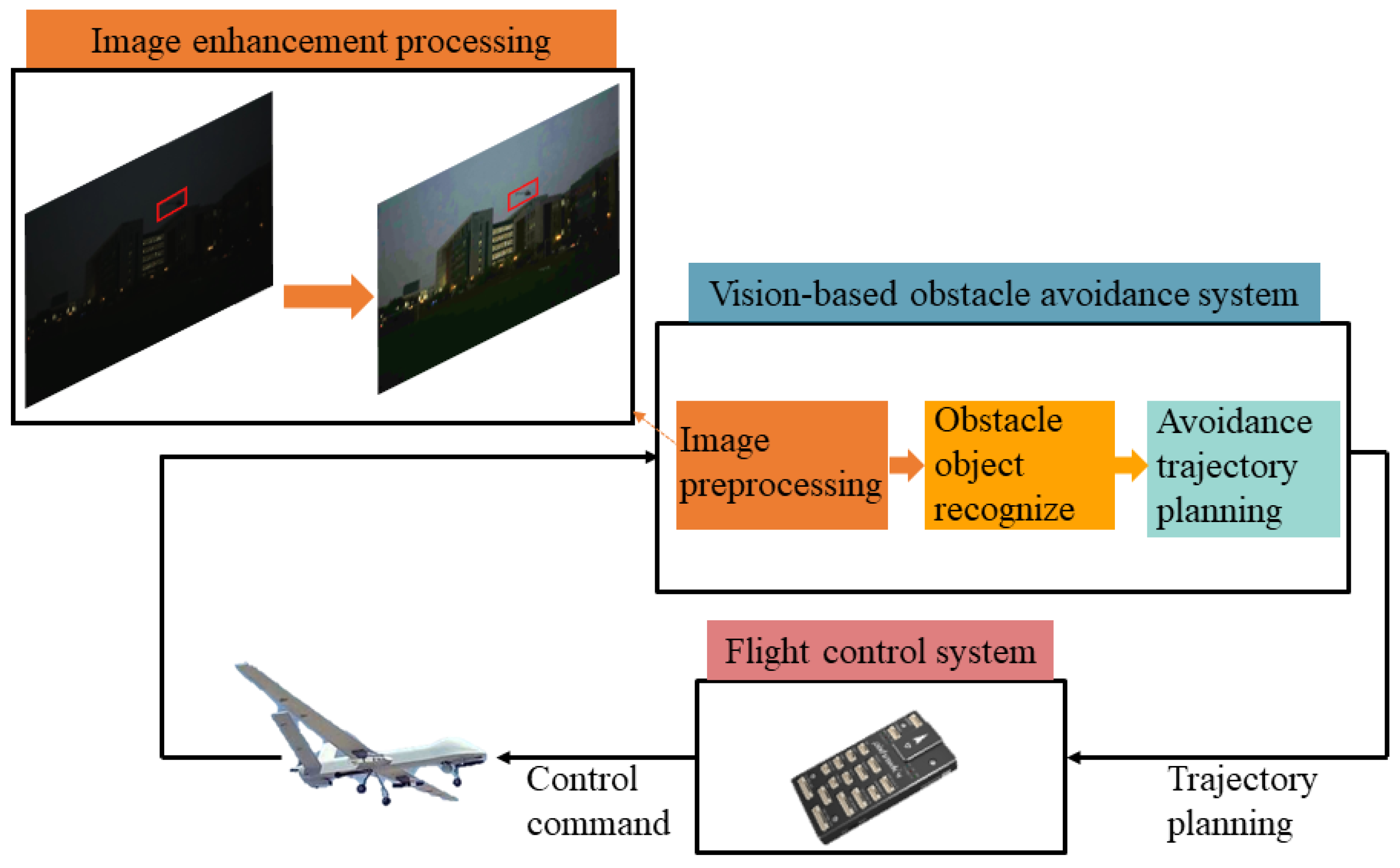
- Vision-based obstacle avoidance [7].
- (1)
- Histogram equalization-based algorithms, its core idea is to extend the image dynamic range by adjusting the histogram, so that the darker areas of the image are visible. Its main advantages are simple and high in efficiency, whereas the disadvantage is that this kind of algorithm is not flexible enough for adjusting the local area of the image, which can easily lead to under-exposure/over-exposure and noise amplification in the local area of the image. Representative algorithms include contrast-accumulated histogram equalization (CAHE) [14], brightness-preserving dynamic histogram equalization (BPDHE) [15], etc.
- (2)
- Defogging-based algorithms, these algorithms first invert the image, then apply the defogging algorithm to the inverted image, and finally invert the defogged image to obtain an enhanced image. The basic model used by this kind of algorithm lacks reasonable physical explanation, and its use of denoising techniques as post-processing will result in the blurring of image details. Representative algorithms include adaptive multiscale retinex (AMSR) [16], ENR [17], etc.
- (3)
- Statistical model-based algorithms, this kind of algorithm utilizes a statistical model to characterize the ideal attributes of an image. The effectiveness of such algorithms relies on prior knowledge of the statistical model. When the assumptions are exceeded, such as strong noise in the input image, the adaptability of such algorithms is insufficient. Representative algorithms include bio-inspired multi-exposure fusion (BIMEF) [18].
- (4)
- Retinex-based algorithms, this kind of algorithm breaks down the image into two components, a reflectance map and an illumination map, and further processes these two components to obtain the enhancement image. The main advantage of such algorithms is that they can dynamically process images and achieve adaptive enhancement for various images. However, their disadvantage is that such algorithms remove illumination by default and do not limit the range of reflectance, so they cannot effectively maintain the naturalness of the image. Representative algorithms include joint enhancement and denoising (JED) [19], low-light image enhancement (LIME) [20], multiple image fusion (MF) [21], Robust [22], etc.
- (5)
- Deep learning-based algorithms, this kind of algorithm enhances an image by the relationship between the poor brightness image and the well-exposed image which is obtained by training a deep neural network. The extraction of powerful prior information from large-scale data gives this algorithm a general performance advantage. However, those algorithms have high computational complexity, are time-consuming, and require large datasets. Representative algorithms include enhancement via edge-enhanced multi-exposure fusion network (EEMEFN) [23], Zero-reference deep curve estimation (Zero DCE) [24], etc.
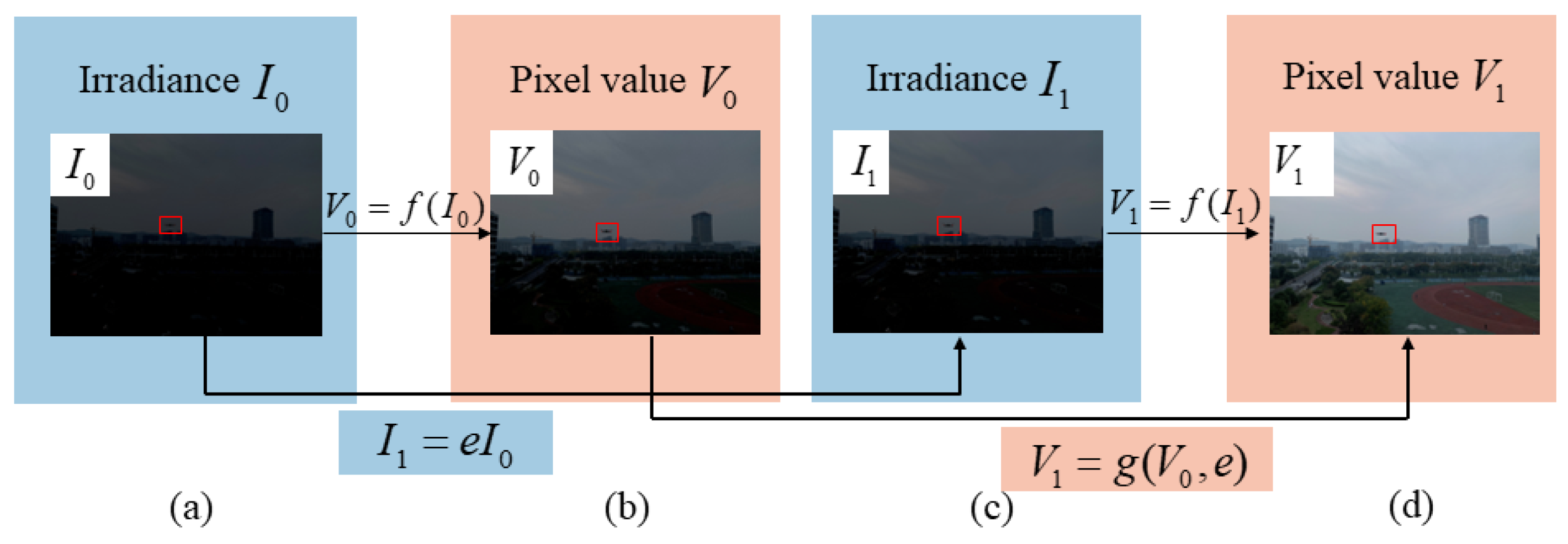
2. Mathematical Model of Scene Brightness Described by Image
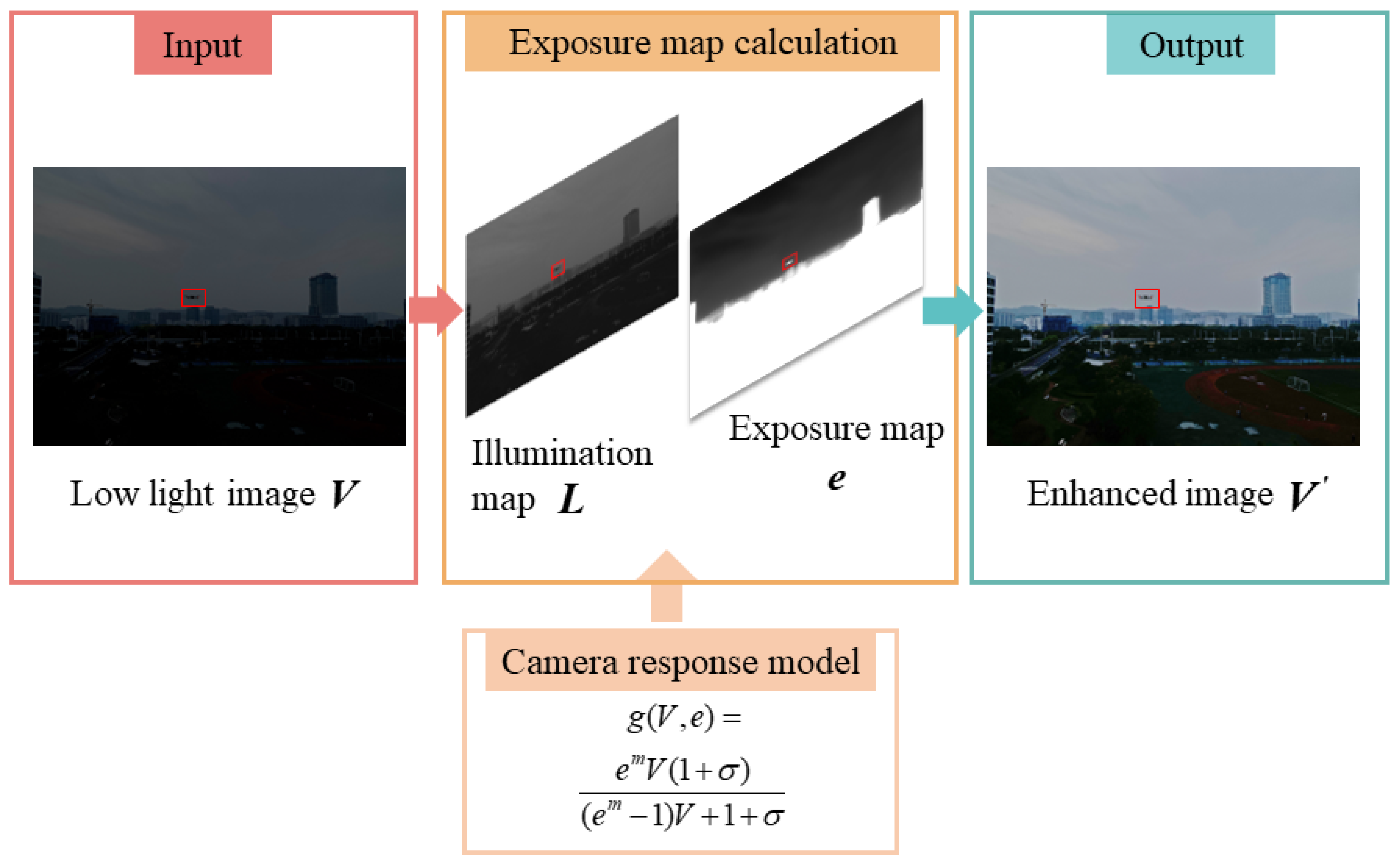
3. The Improved Image Enhancement Algorithm
3.1. Camera Response Model Determination
3.2. Exposure Ratio Matrix Calculation
4. Experimental Results and Analysis
4.1. Dataset Construction
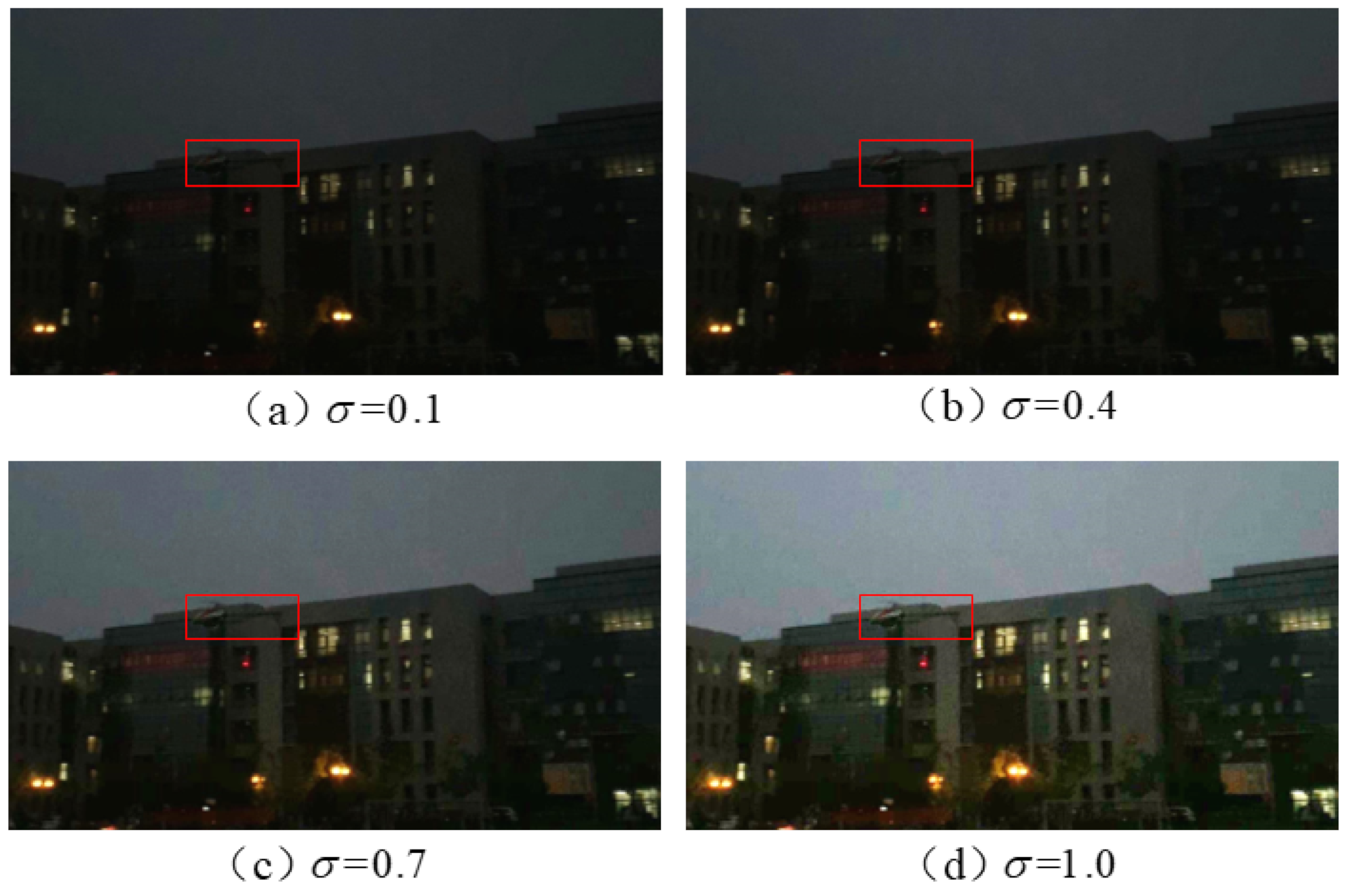
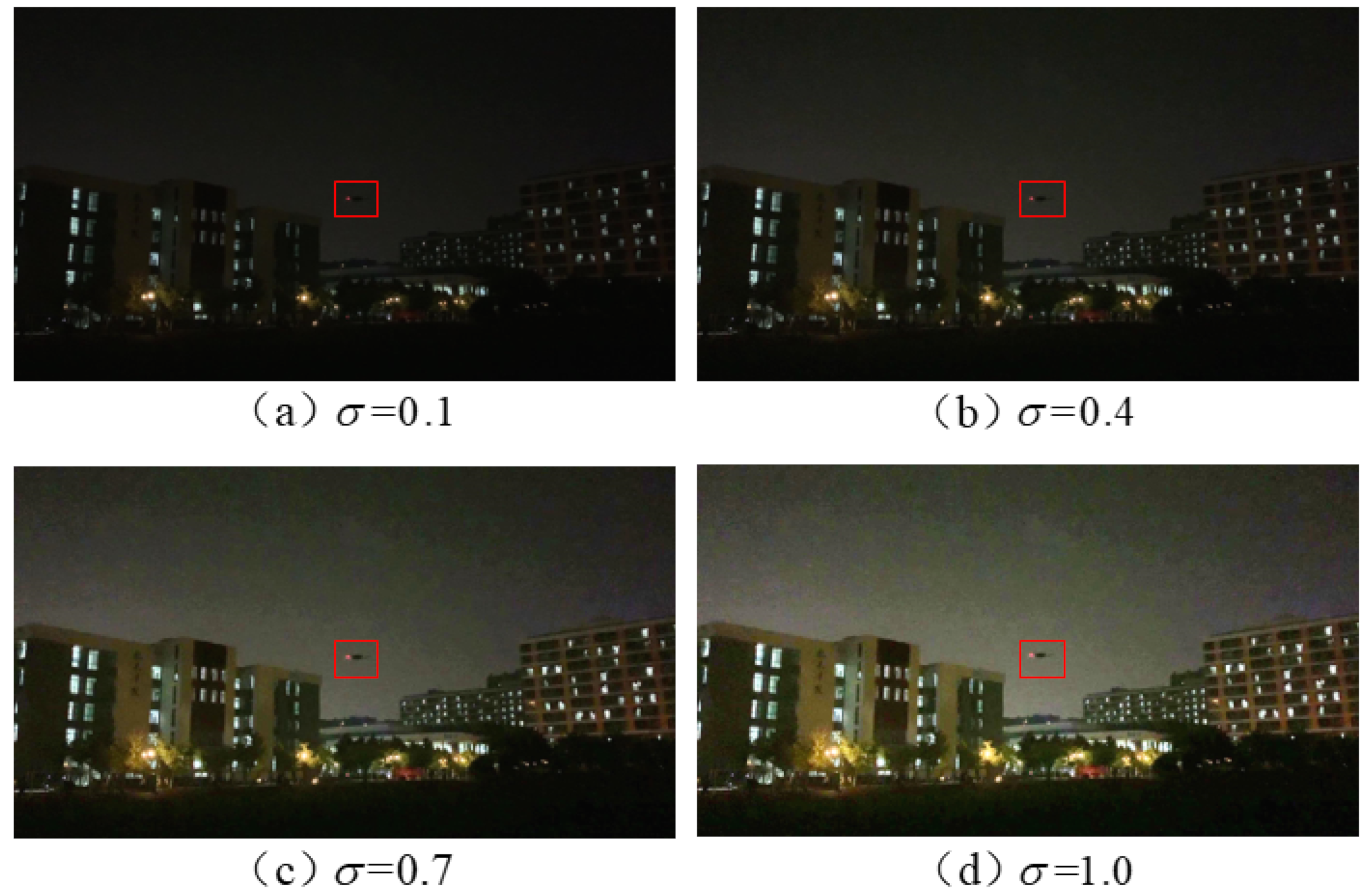
4.2. Enhancement When Changes
4.3. Comparison Experiments
4.3.1. Time-Consumption Comparison with Similar Brightness Enhancement Algorithms
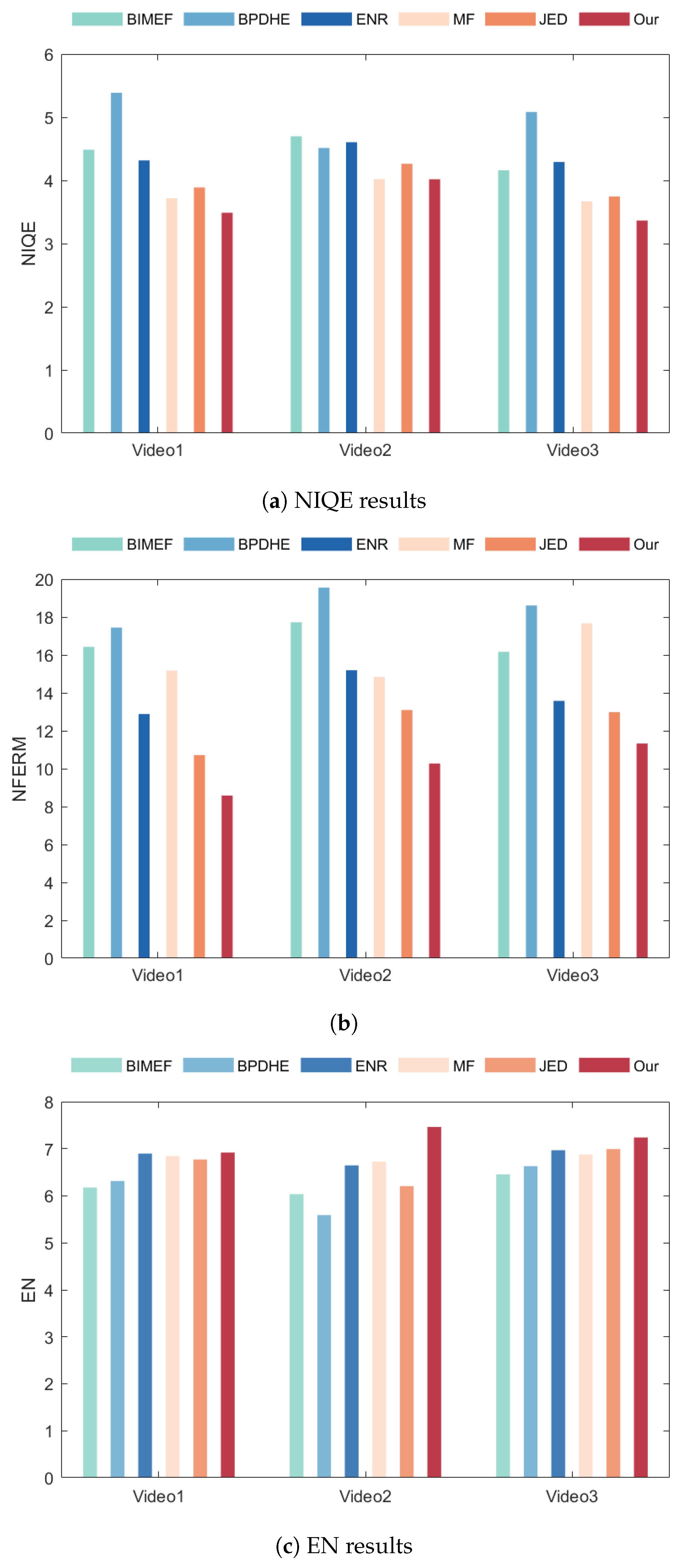
4.3.2. Comparison with Similar Brightness Enhancement Algorithms
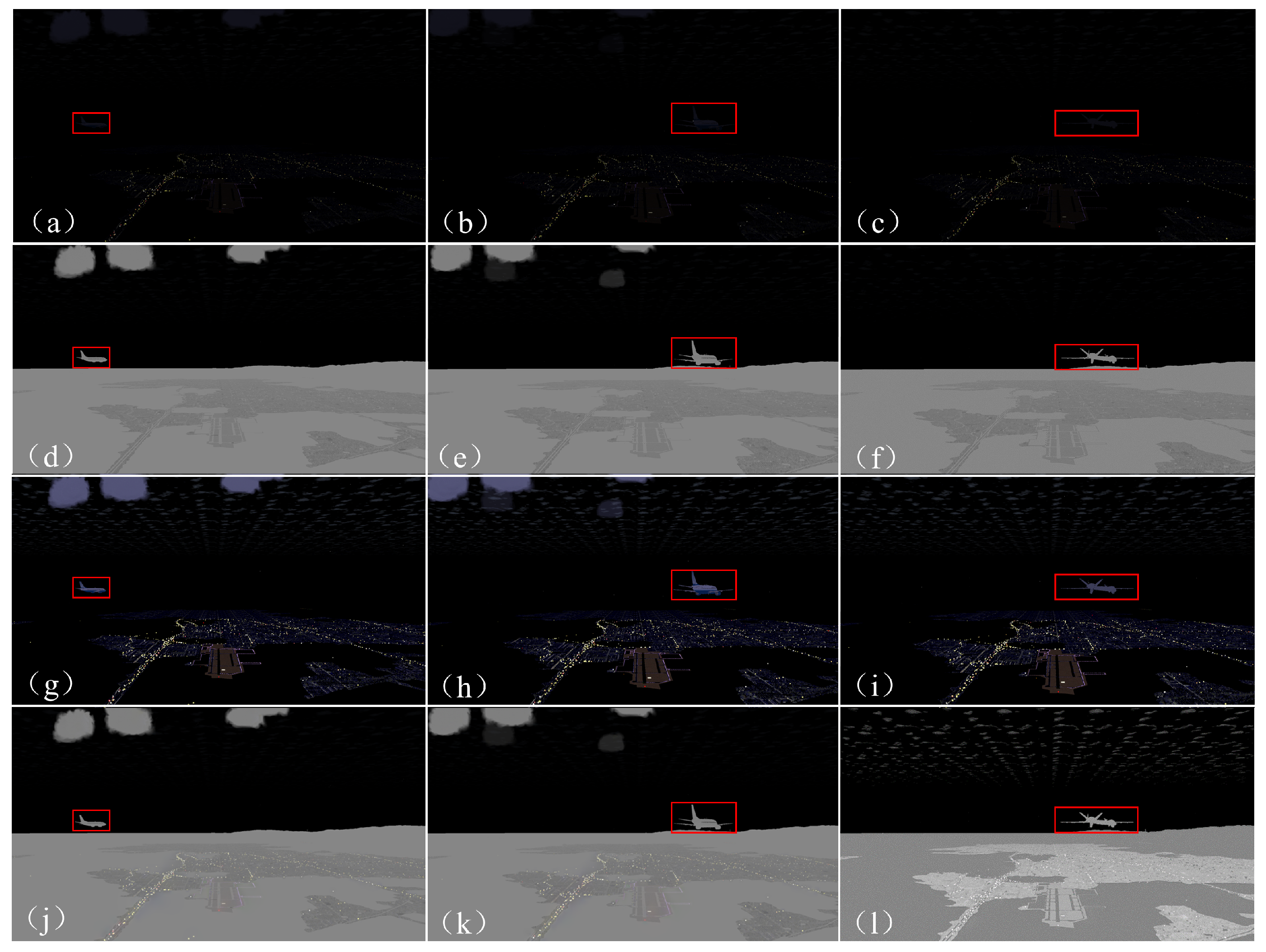
4.3.3. The Effect of Brightness Enhancement on oBstacle Object Detection
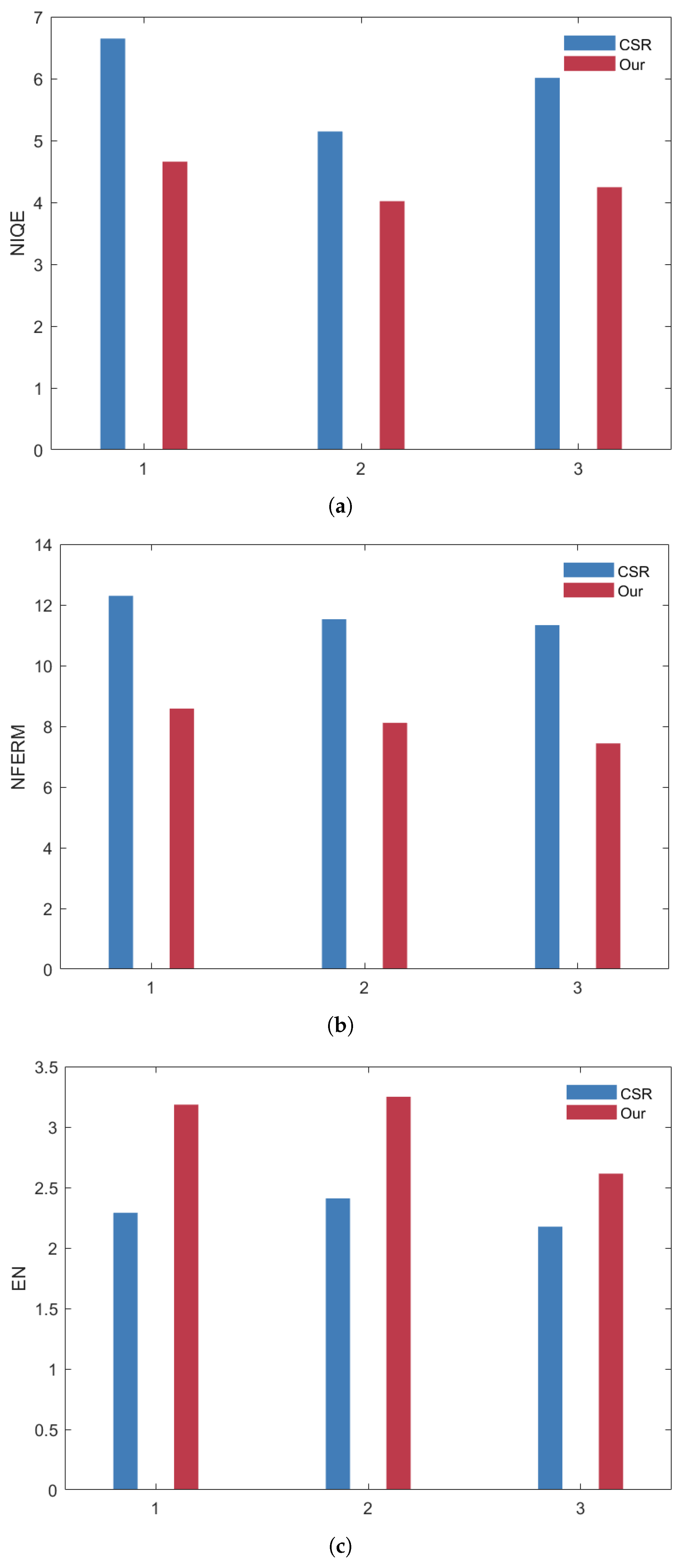
4.3.4. Comparison with the Infrared and Visible Images Fusion Algorithm
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Peterson, M.; Du, M.; Springle, B.; Black, J. SpaceDrones 2.0—Hardware-in-the-Loop Simulation and Validation for Orbital and Deep Space Computer Vision and Machine Learning Tasking Using Free-Flying Drone Platforms. Aerospace 2022, 9, 254. [Google Scholar] [CrossRef]
- Cai, P.; Wang, H.; Huang, H.; Liu, Y.; Liu, M. Vision-based autonomous car racing using deep imitative reinforcement learning. IEEE Robot. Autom. Lett. 2021, 6, 7262–7269. [Google Scholar] [CrossRef]
- Tijmons, S.; De Wagter, C.; Remes, B.; De Croon, G. Autonomous door and corridor traversal with a 20-gram flapping wing MAV by onboard stereo vision. Aerospace 2018, 5, 69. [Google Scholar] [CrossRef] [Green Version]
- Brukarczyk, B.; Nowak, D.; Kot, P.; Rogalski, T.; Rzucidło, P. Fixed Wing Aircraft Automatic Landing with the Use of a Dedicated Ground Sign System. Aerospace 2021, 8, 167. [Google Scholar] [CrossRef]
- Moura, A.; Antunes, J.; Dias, A.; Martins, A.; Almeida, J. Graph-SLAM approach for indoor UAV localization in warehouse logistics applications. In Proceedings of the 2021 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Santa Maria da Feira, Portugal, 28–29 April 2021. [Google Scholar]
- Wang, Z.; Zhao, D.; Cao, Y. Visual Navigation Algorithm for Night Landing of Fixed-Wing Unmanned Aerial Vehicle. Aerospace 2022, 9, 615. [Google Scholar] [CrossRef]
- Corraro, F.; Corraro, G.; Cuciniello, G.; Garbarino, L. Unmanned Aircraft Collision Detection and Avoidance for Dealing with Multiple Hazards. Aerospace 2022, 9, 190. [Google Scholar] [CrossRef]
- Li, H.; Cao, Y.; Ding, M.; Zhuang, L. Removing dust impact for visual navigation in Mars landing. Adv. Space Res. 2016, 57, 340–354. [Google Scholar] [CrossRef]
- González, D.; Patricio, M.A.; Berlanga, A.; Molina, J.M. A super-resolution enhancement of UAV images based on a convolutional neural network for mobile devices. Pers. Ubiquitous Comput. 2022, 26, 1193–1204. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, S.; Zuo, X. Research on Dehazing Algorithm of Single UAV Reconnaissance Image under Different Landforms Based on Retinex. J. Phys. Conf. Ser. 2021, 1846, 012025. [Google Scholar] [CrossRef]
- Zhang, K.; Zheng, R.; Ma, S.; Zhang, L. Uav remote sensing image dehazing based on saliency guided two-scaletransmission correction. In Proceedings of the 2021 IEEE International Conference on Image Processing (ICIP), Anchorage, AK, USA, 19–22 September 2021. [Google Scholar]
- Wang, W.; Peng, Y.; Cao, G.; Guo, X.; Kwok, N. Low-illumination image enhancement for night-time UAV pedestrian detection. IEEE Trans. Ind. Inform. 2020, 17, 5208–5217. [Google Scholar] [CrossRef]
- Gao, T.; Li, K.; Chen, T.; Liu, M.; Mei, S.; Xing, K.; Li, Y.H. A novel UAV sensing image defogging method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2610–2625. [Google Scholar] [CrossRef]
- Wu, X.; Liu, X.; Hiramatsu, K.; Kashino, K. Contrast-accumulated histogram equalization for image enhancement. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017. [Google Scholar]
- Ibrahim, H.; Kong, N.S.P. Brightness preserving dynamic histogram equalization for image contrast enhancement. IEEE Trans. Consum. Electron. 2007, 53, 1752–1758. [Google Scholar] [CrossRef]
- Lee, C.H.; Shih, J.L.; Lien, C.C.; Han, C.C. Adaptive multiscale retinex for image contrast enhancement. In Proceedings of the 2013 International Conference on Signal-Image Technology & Internet-Based Systems, Kyoto, Japan, 2–5 December 2013. [Google Scholar]
- Li, L.; Wang, R.; Wang, W.; Gao, W. A low-light image enhancement method for both denoising and contrast enlarging. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015. [Google Scholar]
- Ying, Z.; Li, G.; Gao, W. A bio-inspired multi-exposure fusion framework for low-light image enhancement. arXiv 2017, arXiv:1711.00591. [Google Scholar]
- Ren, X.; Li, M.; Cheng, W.H.; Liu, J. Joint enhancement and denoising method via sequential decomposition. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018. [Google Scholar]
- Guo, X.; Li, Y.; Ling, H. LIME: Low-light image enhancement via illumination map estimation. IEEE Trans. Image Process. 2016, 26, 982–993. [Google Scholar] [CrossRef]
- Fu, X.; Zeng, D.; Huang, Y.; Liao, Y.; Ding, X.; Paisley, J. A fusion-based enhancing method for weakly illuminated images. Signal Process. 2016, 129, 82–96. [Google Scholar] [CrossRef]
- Li, M.; Liu, J.; Yang, W.; Sun, X.; Guo, Z. Structure-revealing low-light image enhancement via robust retinex model. IEEE Trans. Image Process. 2018, 27, 2828–2841. [Google Scholar] [CrossRef]
- Zhu, M.; Pan, P.; Chen, W.; Yang, Y. Eemefn: Low-light image enhancement via edge-enhanced multi-exposure fusion network. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020. [Google Scholar]
- Guo, C.; Li, C.; Guo, J.; Loy, C.C.; Hou, J.; Kwong, S.; Cong, R. Zero-reference deep curve estimation for low-light image enhancement. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Loh, Y.P.; Chan, C.S. Getting to know low-light images with the exclusively dark dataset. Comput. Vis. Image Underst. 2019, 178, 30–42. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Duan, M.; Chen, W.B.; Shi, H. Adaptive weighted image fusion algorithm based on NSCT multi-scale decomposition. In Proceedings of the 2020 International Conference on System Science and Engineering (ICSSE), Kagawa, Japan, 31 August–3 September 2020. [Google Scholar]
- Hu, P.; Yang, F.; Ji, L.; Li, Z.; Wei, H. An efficient fusion algorithm based on hybrid multiscale decomposition for infrared-visible and multi-type images. Infrared Phys. Technol. 2021, 112, 103601. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Huang, S.; Zuo, Y.; Sun, J. Infrared and visible image fusion using visual saliency sparse representation and detail injection model. IEEE Trans. Instrum. Meas. 2020, 70, 1–15. [Google Scholar] [CrossRef]
- Nirmalraj, S.; Nagarajan, G. Fusion of visible and infrared image via compressive sensing using convolutional sparse representation. ICT Express 2021, 7, 350–354. [Google Scholar] [CrossRef]
- An, W.B.; Wang, H.M. Infrared and visible image fusion with supervised convolutional neural network. Optik 2020, 219, 165120. [Google Scholar] [CrossRef]
- Ren, Y.; Yang, J.; Guo, Z.; Zhang, Q.; Cao, H. Ship classification based on attention mechanism and multi-scale convolutional neural network for visible and infrared images. Electronics 2020, 9, 2022. [Google Scholar] [CrossRef]
- Mann, S. Comparametric equations with practical applications in quantigraphic image processing. IEEE Trans. Image Process. 2000, 9, 1389–1406. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Land, E.H.; McCann, J.J. Lightness and retinex theory. Josa 1971, 61, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Mittal, A.; Soundararajan, R.; Bovik, A.C. Making a “completely blind” image quality analyzer. IEEE Signal Process. Lett. 2012, 20, 209–212. [Google Scholar] [CrossRef]
- Gu, K.; Zhai, G.; Yang, X.; Zhang, W. Using free energy principle for blind image quality assessment. IEEE Trans. Multimed. 2014, 17, 50–63. [Google Scholar] [CrossRef]
- Roberts, J.W.; Van Aardt, J.A.; Ahmed, F.B. Assessment of image fusion procedures using entropy, image quality, and multispectral classification. J. Appl. Remote Sens. 2008, 2, 023522. [Google Scholar]
- Liu, Y.; Chen, X.; Ward, R.K.; Wang, Z.J. Image fusion with convolutional sparse representation. IEEE Signal Process. Lett. 2016, 23, 1882–1886. [Google Scholar] [CrossRef]
- Download Link of FightGear 2020.3. Available online: https://www.flightgear.org/ (accessed on 10 June 2022).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | Image Sensor | Pixels | FOV | Aperture | ISO Range | Shutter Speed | Video Resolution |
|---|---|---|---|---|---|---|---|
| DJI Mavic 2 Pro | 1 inch CMOS | 20 MP | 77 | f/2.8– f/11 | 100–6400 | 8–1/8000 s | 1920 × 1080 |
| UAV | Align 700L V2 | DJI F450 | DJI Mavic 2 Pro |
|---|---|---|---|
| Dimensions | 1320 × 220 × 360 mm | 450 × 450 × 350 mm | 322 × 242 × 84 mm |
| Weight | 5100 g | 1357 g | 907 g |
| Algorithm | BIMEF | BPDHE | ENR | MF | JED | Ours |
|---|---|---|---|---|---|---|
| Mean time consumption (s) | 0.53 | 1.99 | 2.96 | 3.94 | 4.11 | 0.88 |
| Image | Low-Light Image | BIMEF | BPDHE | ENR | MF | JED | Our |
|---|---|---|---|---|---|---|---|
| AP | 0.301 | 0.572 | 0.507 | 0.740 | 0.786 | 0.749 | 0.857 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zhao, D.; Cao, Y. Image Quality Enhancement with Applications to Unmanned Aerial Vehicle Obstacle Detection. Aerospace 2022, 9, 829. https://doi.org/10.3390/aerospace9120829
Wang Z, Zhao D, Cao Y. Image Quality Enhancement with Applications to Unmanned Aerial Vehicle Obstacle Detection. Aerospace. 2022; 9(12):829. https://doi.org/10.3390/aerospace9120829
Chicago/Turabian StyleWang, Zhaoyang, Dan Zhao, and Yunfeng Cao. 2022. "Image Quality Enhancement with Applications to Unmanned Aerial Vehicle Obstacle Detection" Aerospace 9, no. 12: 829. https://doi.org/10.3390/aerospace9120829