1. Introduction
With the growing need for fast-moving intercontinental transportation systems and space tourism, the global research community has renewed its interest in developing safe, reliable, and economical supersonic flight systems. Despite this, the primary challenges faced in developing these vehicles are wave drag, and aerodynamic heating [
1]. It may be possible to make supersonic and hypersonic space exploration missions viable by modifying flow behavior and geometrically optimizing blunt bodies [
2,
3]. Implementing active, passive, and hybrid flow control techniques are actively pursued to reduce air resistance, and heat generation on blunt bodies [
4,
5]. Active flow control techniques involve introducing energy or power to the flow. This involves energy deposition upstream of the body and using an opposing jet. The opposing jet has gained popularity among the active flow control techniques owing to its re-usability and profitability. This effective method comprises the ejection of a jet from the stagnation point of a blunt body in the upstream direction. The free-stream fluid then transforms this jet to flow in the rearward direction forming a shear layer over the body surface, thus protecting it from the external high-pressure and high-temperature environment.
The experiments by Hayashi et al. [
6,
7] and associated numerical studies disclosed the flow field around the blunt-shaped profile at several pressure ratios (PR). Many researchers used this study as a verification criterion for the numerical approach. Venukumar et al. [
8] also proved the productiveness of opposing jets through experimentation. Rong [
9] proposed a new assessment framework incorporating the jet pressure ratio and its area to analyze the impact of opposing jets. Numerical methods have also studied the impact of jet temperature [
10,
11], medium [
12,
13], and nozzle geometric parameters [
2,
14] in reducing the wave drag and heat flux. Similarly, Gerdroodbary et al. [
13] suggested a method that converts one opposing jet into a series of forward-facing micro-jets of the same area resulting in a heat-load reduction of 40%.
Moreover, Shen and Liu [
15] proposed a small, lightweight gas device for opposing jet thermal protection in fast-moving flows, which utilizes the fuel gas generated with solid fuel as cooling gas. Another numerical study on shock reduction through a counter-flow plasma jet also showed pragmatic impacts on drag reduction in the supersonic flow regime [
16]. Finally, as a more efficient method in heat reduction than the steady jet, the opposing pulsed-jet has also attracted some attention [
17,
18].
The flow physics of opposing jets is of significant interest to researchers. The core feature of opposing jets, when installed on blunt bodies, is the formation of long and short penetration modes. The long penetration mode is oscillatory and deemed inappropriate due to unsteady behavior. However, the short penetration mode contributes to a significant reduction in drag and wall-heat flux. Bibi et al. [
2] proposed shape changes in the ejection of opposing jet nozzle to control short and long penetration modes. Similarly, Li et al. [
14,
19] examined the effects of jet nozzle configuration and free-stream flow conditions on drag and heat reduction through a counter-flowing system [
20].
Passive flow control methods involve techniques that do not introduce any energy or power to the flow. Flow is usually manipulated by using different geometric shapes as per application requirements. Various methods are used to separate flow for drag and heat reduction, including grooves, ribs, spikes, and their combinations [
21,
22]. Among these passive techniques, the mechanical spike has gained the most importance. As part of the seminal study by Alexander [
23], he suggested the use of aerospike to reduce wave drag at high-speed flows. Several studies were subsequently proposed to explore the flow physics of fast-moving flows over a blunt profile with an elongated nose tip. Findings from the literature show that the spike modifies the forebody flow field in two ways [
24]. First, it breaks the single strong shock wave into a series of weak oblique shock waves. Second, it causes flow separation and creates a shear layer that re-attaches downstream of the forebody region [
24]. A comprehensive review of spike technology conducted by Ahmed [
25] suggests that the aerospike can reduce drag as it protrudes from the nose tip of the blunt body.
The hybrid flow control technique is an amalgamation of active and passive devices that can significantly reduce aerodynamic drag and heat flux. There are several combinations of active and passive devices available in the literature, such as the combined impact of counter-flowing jets and forward-facing cavities. The forward-facing cavity located at the tip of the blunt body is accepted for wave drag, and aero-heating reduction [
26,
27]. Huang et al. [
28,
29] conducted parametric research concerning the influence of cavity location, length-to-depth ratio, and aft angle of the cavity. Based on the conventional cylindrical configuration, a novel cavity of parabolic geometry was suggested by Sun et al. [
30], which showed greater efficiency in reducing heat and pressure. Moreover, the amalgamated jet and cavity concept was suggested to be better for drag and aero-heating reduction [
26,
27,
28,
29,
30,
31]. Similarly, Gerdroodbary et al. [
12] analyzed the combined effect of an aerospike and an opposing jet at a Mach number of 5.75 by ejecting cooling gas from the top of the blunt body. The analysis outcomes showed the tremendous advantages of a combined thermal protection system for thermal relaxation and drag reduction of blunt bodies. Eghlima et al. [
32,
33] presented numerical simulations of drag variation and heat flow around a spherical head cylinder when an amalgamated thermal protection system was installed, and with air as the jet gas. At a Mach number of 3.98 and using liquid nitrogen, Huang et al. [
28] modeled a combined aerospike and opposing jet system in a hypersonic flow. Jiang et al. [
34] performed a wind tunnel experiment on a hemispherical blunt-shaped body to analyze the impacts of a combined aerospike and transverse jet thermal protection system on thermal protection and drag reduction for a blunt body in high-speed flows.
This allows the aerospike to effectively push the strong bow shock away from the blunt-body wall, generating a weak conical shock wave from the spike tip, and reducing the high pressure and temperature of the flow field after the shock wave pattern. As a result, the additional spike separates the upstream flow field of the blunt body, where the separation flow then attaches to the vehicle’s surface, creating a re-circulation zone adjacent to the vehicle’s head. Despite the well-established idea that elongated aerospikes can reduce extreme pressure drag on blunt bodies, they also increase the heat transfer rate. Since the mechanical spike endures high temperatures during flight, it must be replaced frequently or cooled continuously. The aerospike can be made effective by using a hemispherical blunt tip shield known as an “
aerodisk”, further enhancing the efficiency of the elongated aerospike. The size, shape, and length of the aerodisk and the spike have raised concerns about the flow field around bluntly shaped profiles, as depicted in
Figure 1. A comprehensive summary of the experimental research shows that the aerospike length-to-diameter ratio (L/D) presents a significant geometric parameter of the thermal protection system.
In the present study, a Design of Experiment (DOE) based optimization process was used to improve the passive and hybrid flow control techniques by introducing a greater understanding of the flow field around a blunt body. The goal was to alter the flow field for aerodynamic drag and heat reduction using hybrid techniques. For this purpose, we investigated wave drag and heat reduction employing numerical and statistical approaches. This paper begins with a brief review of different flow control techniques (
Section 1), followed by a description of the research problem through the development of a numerical model used for validation cases and setup for aerodisk design space (
Section 2).
Section 3 presents the optimized design results using a single and double aerodisk. These results include flow physics of optimized geometries. Finally, the main results of this work are summarized in
Section 4.
2. Problem Formulation
Computational Fluid Dynamics (CFD) is used as one of the tools for the numerical analysis of complex flow fields. The modeling and simulation setup was created using Reynolds-Averaged Navier–Stokes (RANS) solver and best-fit turbulence model. These represent the appropriate models for use in CFD simulations.
An axis-symmetrical blunt body was generated with and without an opposing jet at the nose of the blunt body to validate the flow field. Furthermore, the passive and hybrid designs for single and multiple aerodisks on the spiked blunt body were geometrically constructed. The two central equations involved in the analysis are continuity and momentum equations. Furthermore, as the flow is analyzed at high Mach numbers, the energy equation was also incorporated. The continuity equation is expressed in Equation (
1) where
is density and u, v, and w are velocity components in x-, y-, and z-directions, respectively. The first term is the rate of change in density, while the second term describes the net flow of mass out of the elements across its boundaries and is denoted as the convective term.
The three equations are the momentum equation in x-, y-, and z-directions, respectively; where “P” is the pressure, “
” is Reynolds number, and
is the stress.
Since the flow is compressible, the energy equation is also utilized and is given as follows:
2.1. Computational Setup
A fully structured 2D axis-symmetrical computational grid was generated in ANSYS
® Mesher. Due to the symmetry of the problem, only one-half of the geometry was modeled. The grid was highly clustered near the body surface and jet orifice (for the hybrid flow method) to accurately resolve complex flow features in these regions, as shown in
Figure 2. A grid independence study was also performed for the no jet case, as shown in
Figure 3. A total of three grids; coarse (40,000), medium (100,000), and refined (150,000) were used. The refined grid results matched very closely with the experimental surface pressure plots. Therefore, the refined grid was selected for further analysis.
Ansys
® Fluent was used as the numerical solver for performing simulations. Axis-symmetrical steady-state Reynolds-Averaged Navier–Stokes (RANS) equations were solved using a density-based implicit solver. This solver is found to work efficiently for supersonic and hypersonic flows. Since aero-thermal chemical considerations were neglected, the air was therefore modeled as an ideal gas in current operating conditions. Air viscosity was defined by Sutherland’s viscosity law. A turbulence model was introduced to capture complex flow features such as shock waves, separation, and re-circulation regions. The K−
SST turbulence model densely captures the flow field in the inner region of the boundary layer. The flow contours and re-circulation region located in front of the blunt body were more concentrated in the K−
SST model than the Spalart Allmaras model and can be viewed in
Figure 4. Moreover, the results of the K−
turbulence model mapped best with the experimental data [
6]. Therefore, the K−
turbulence model was used in this study.
The baseline configuration with available experimental data was adopted from Hayashi et al. [
6]. The flow conditions in
Table 1 are similar to those used in the experimental work of Hayashi et al. [
6]. The jet flow boundary was set to pressure inlet. The numerical domain was modeled as far-field, with the outlet modeled as a pressure outlet. The selection of these boundary conditions allowed us to successfully compute the overall mass-flow rate of the system and to assess its conservation. A no-slip isothermal condition was applied to the wall. Details of the boundary conditions used are given in
Table 1.
2.2. Validation of Test Case
Validation results were compared against the numerical and experimental work of Hayashi et al. [
6,
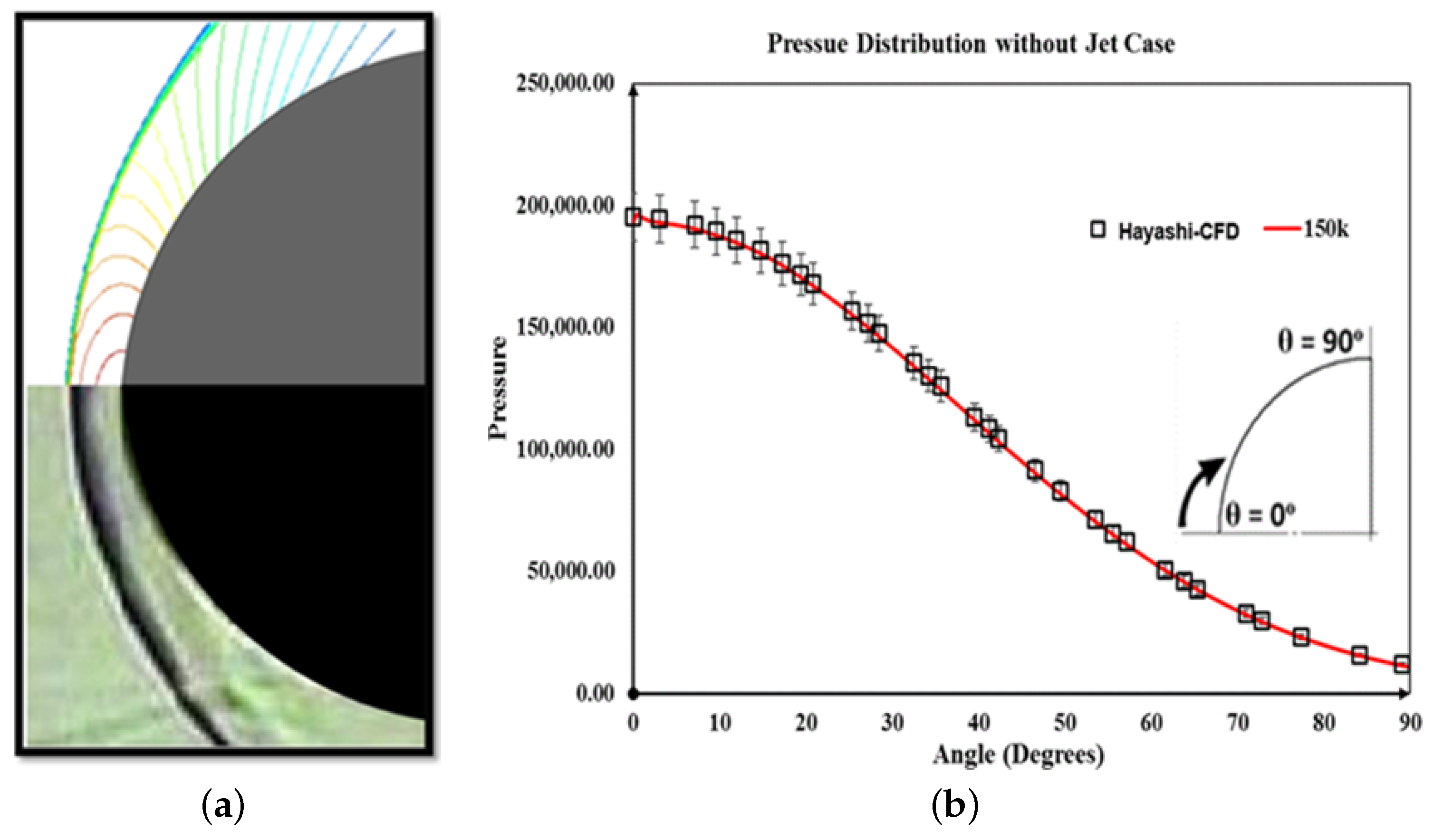
7]. The total surface pressure and wall-heat flux distribution, Stanton number, are compared in the cases with and without jet. The analysis showed the formation of a very thin bow shock visible just ahead of the blunt body in
Figure 5 for the no jet case. The density contour showed that the computed shock stand-off distance is in good agreement with experimental imagery obtained from the work of Hayashi et al. [
6]. Similarly, the pressure distribution comparison demonstrates close agreement with experimental data [
7].
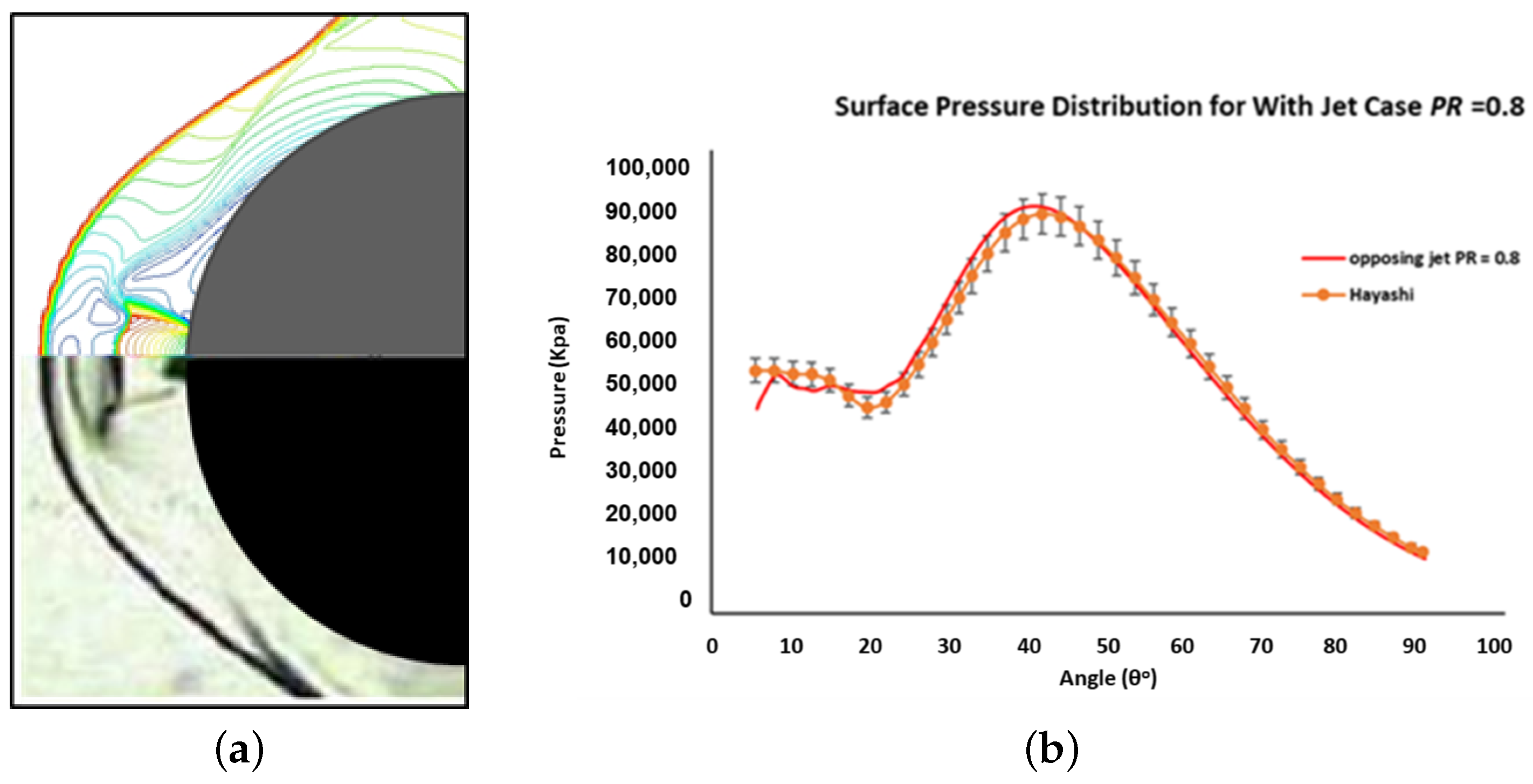
The jet emitted from the nose of the blunt body is specified in terms of total pressure ratio (PR). It describes the ratio of jet stagnation pressure P
to free-stream stagnation pressure P
. In the present work, the jet ejection diameter is kept constant at 4 mm. Numerical simulations of PR = 0.8 are conducted and duly validated with experimental surface pressure data.
Figure 6 shows both numerically validated surface pressure plots and shock stand-off locations with experimental data [
6].
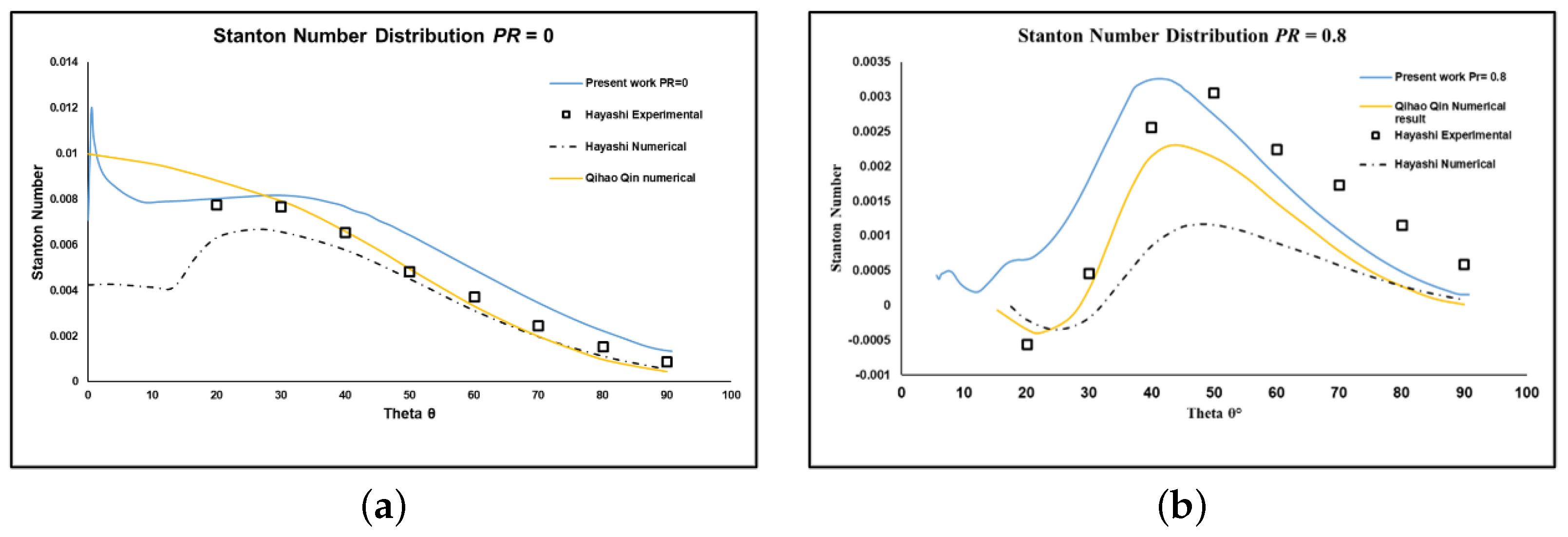
The Stanton number (
St) is a dimensionless number that measures the ratio of heat transferred into a fluid to the thermal capacity of the fluid and is expressed as:
where q
is the surface heat flux, cp
is the specific heat at constant pressure, and T
is the adiabatic wall temperature and computed as:
where Pr
denotes the wall Prandtl number. For the validation case, M
= 3.98, T
= 95.25 K, T
K, C
= 1006.43,
= 1.4, and U
= 778.375 m/s were used. The computed results are compared with those of Hayashi [
6] for the with and without jet cases, as shown in
Figure 7. It can be seen that the Stanton number distributions obtained via numerical methods struggle to cover the experimental results completely. The experimental thermal measurement represents a challenging task from the authors’ point of view. This is mainly due to the rapid thermal response of the blunt body in high-speed flights, whereas starting the wind tunnel and establishing a flow field before the aero-heating measurement occurs is a lengthy process.
2.3. Selection of Design Variables and Their Ranges
Design of Experiments (DOE) is a systematic approach to understand the effect of process and product input parameters on response variables such as product performance, efficiency, processability or optimization of physical properties. It is a mathematical tool used to optimize system performance and interpret the impact of each input parameter on the output responses. In order to predict the product properties and performance within the range selected for the experimental design, DOE employs statistical methodology to understand how a particular input variable affects product performance, and the possible interactions between input variables. In addition, DOE generates the required information using the minimum number of experiments necessary, and applies mathematical analysis to predict the response within experimental limits and under specific experimental conditions. DOE creates a clear division between significant and insignificant input factors. Further, it can be used to determine which factors and interactions are critical and have a major impact on the output response, and which variables and interactions contribute insignificantly to the output. In addition, DOE is computationally extensive and economically cheap in providing a usable understanding of product properties and efficiency. The best use of DOE is during new product development, existing product optimization, and solving technical problems where more than one variable is present. It is also used to help understand the response of multiple variables that can be altered or controlled during experimentation. Another advantage of DOE is that systematic data are generated, summarized, and evaluated to definitively determine whether a project should be continued or the project cannot be resolved and should thus be discontinued. Regardless of whether the DOE results are positive (the experiment shows the desired response) or negative (the experiment shows an undesired response), it is still important to complete the project and document the results so that the project will not be needlessly repeated. In short, the major steps of DOE provide an understanding of the processes and their interactions over the experimental space studied [
35]. A critical step in the DOE process is the selection of input variables and the maximum and minimum range for each input variable. The input factors and ranges directly impact output responses. In the present research, two control variables were selected for the optimization process. A schematic view of the single and double aerodisk configurations with aerospike is shown in
Figure 8.
For passive and hybrid design optimization using a single aerodisk, the two significant factors, spike length, and disk diameter are selected along with their maximum and minimum limits as described in
Table 2.
For an aerospike with a double aerodisk, the two input factors were kept the same as that selected for the single aerodisk; however, the position of the intermediate aerodisk (Disk 2) varied at 25%, 50% and 75% of the overall spike length, as shown in
Figure 8. Therefore, in this case, the three input factors and their maximum and minimum limits are shown in
Table 3.
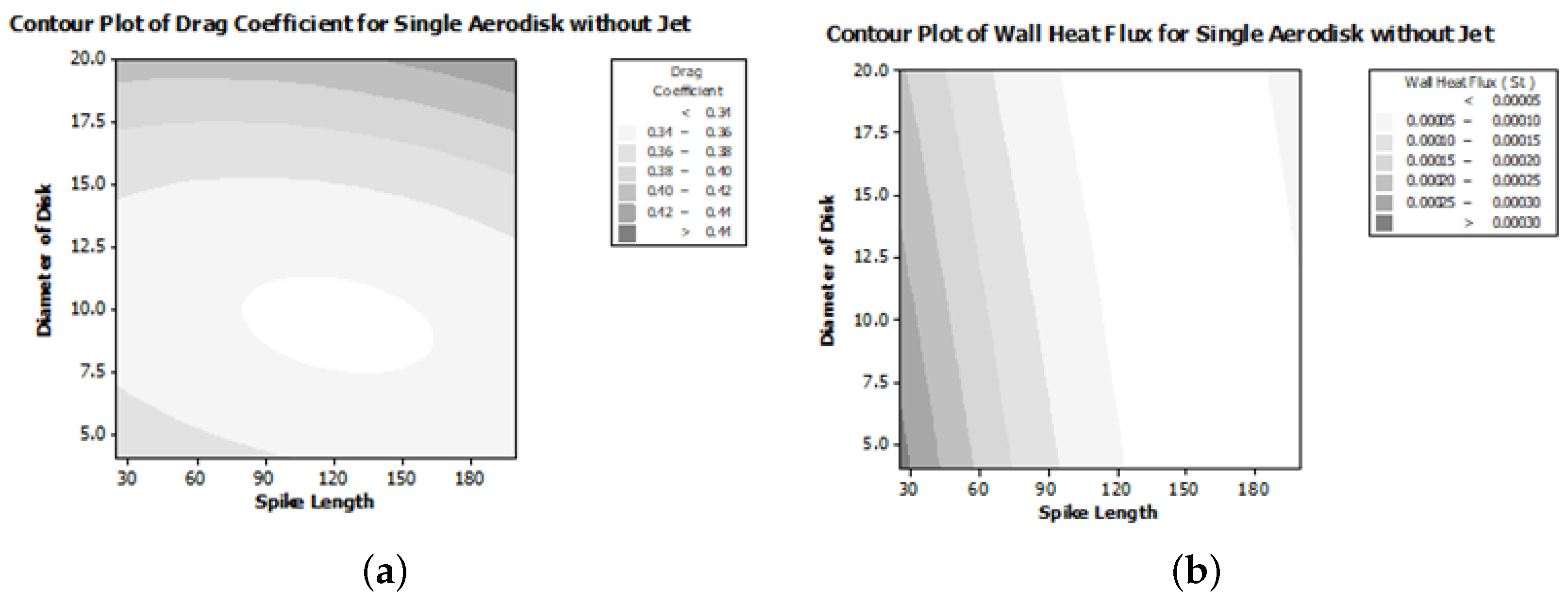
The two significant output responses are the drag coefficient (C
) and the Stanton number (
St). ||
St||
is considered the main output response, and is therefore utilized in analyzing the results for a single aerodisk in the with and without the jet cases. Conceptually, the second norm of values calculates the distance of vector coordinate from the origin of vector space. The result is a positive distance value. The second norm of Stanton number ||
St||
is calculated by taking the square root of the sum of squared values of Stanton numbers of each spatial location over the body surface within 2D vector space.
As the wall-heat flux distribution over the body surface area varies from point to point in vector space; therefore, the second norm of Stanton number, ||
St||
, is selected as the output response as shown in Equation (
8).
2.4. Single and Double Aerodisk Design Space
The central composite design is useful in response surface methodology for building a second-order (quadratic) model for the response variable, without requiring the performance of a complete three-level factorial experiment. Occasionally, iterative linear regression is used after the designed experiment is performed to obtain results. Coded variables are often used when constructing this design. The advantage of using either the Central Composite or Box Behnken designs to generate response surfaces is that fewer experiments are required. Using either the Central Composite or Box Behnken design to fit a cubic model requires further experimentation so that there is at least one experiment for each term in the model. Since quadratic models fit 95% of all experimental designs, it is reasonable to start with a quadratic model. Additional experiments can be added later if a higher-order model is required to predict the responses [
36].
The design space is generated through the Central Composite Design (CCD) method for both the passive (without jet) and hybrid (with jet) single aerodisk, as shown in
Table 4. The table shows critical information obtained from the CCD process. Std Order (Standard order) displays the non-randomized order of the runs used to display the design in standard order. Run Order presents the order in which the experiment is to be performed for potential bias reduction in random order. Pt Type shows the type of point in the designed experiment where 1, 0, −1, 2 represent a corner point, center point, axial point, and edge point, respectively. Blocks represent the categorical variable that identifies groups of experimental runs conducted under relatively homogeneous conditions. Using blocks in experimental design and analysis minimizes bias and error variance due to uncontrolled factors.
Similarly, for the double-aerodisk study, twenty experiments were generated to analyze three input factors against two output responses.
Table 5 summarizes the designs generated for double-aerodisk-spiked blunt body.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}