
GIS-Based Spatial Patterns Analysis of Airspace Resource Availability in China


Abstract
:1. Introduction
2. Related Work
2.1. Evaluation Method of Airspace Resource Availability
2.2. Trajectory Clustering
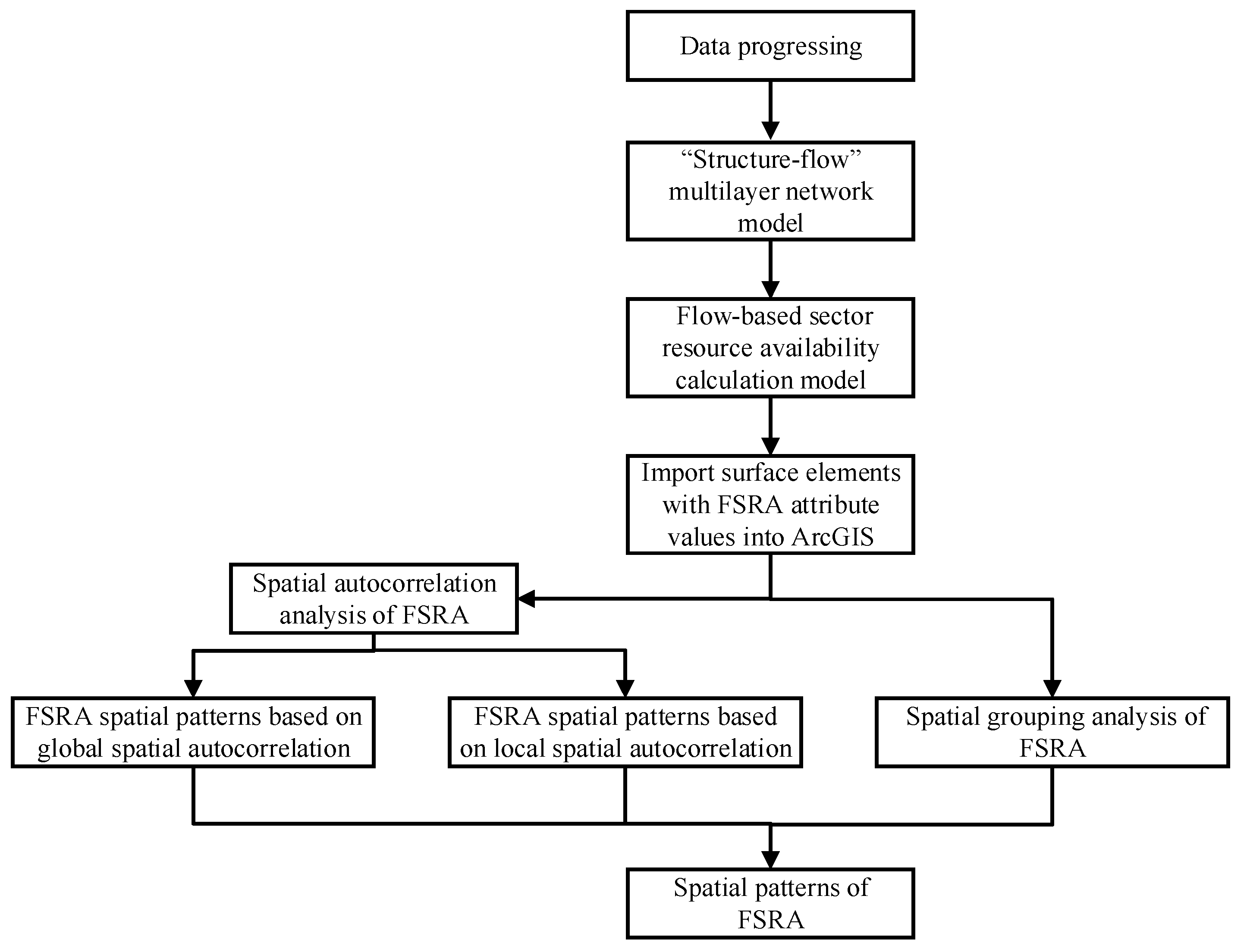
2.3. GIS-Based Spatial Analysis
3. Methodology
3.1. Data Processing
3.2. “Structure-Flow” Multi-Layer Network Model
3.2.1. Flight Trajectory Network (FTN)
3.2.2. Traffic Flow Network (TFN)
| Algorithm 1. TFN based on spectral clustering |
| Input: Similarity matrix A Output: TFN 1. Build the Degree matrix D which is a diagonal matrix where (8); |
| 2. Build the Laplace matrix L of A: (9); |
| 3. Calculate the eigenvalues of L and sort them from large to small, and then extract the eigenvectors corresponding to the first k eigenvalues: ; |
| 4. Build the eigenvector matrix and normalize it to generate matrix Z; |
| 5. Cluster the Z based on the K-means algorithm, the number of clusters is k; |
| 6. Use the mean value method to extract the center track for each clustering result; |
| 7. The TFN is constructed by assembling all the center tracks; |
| 8. end |
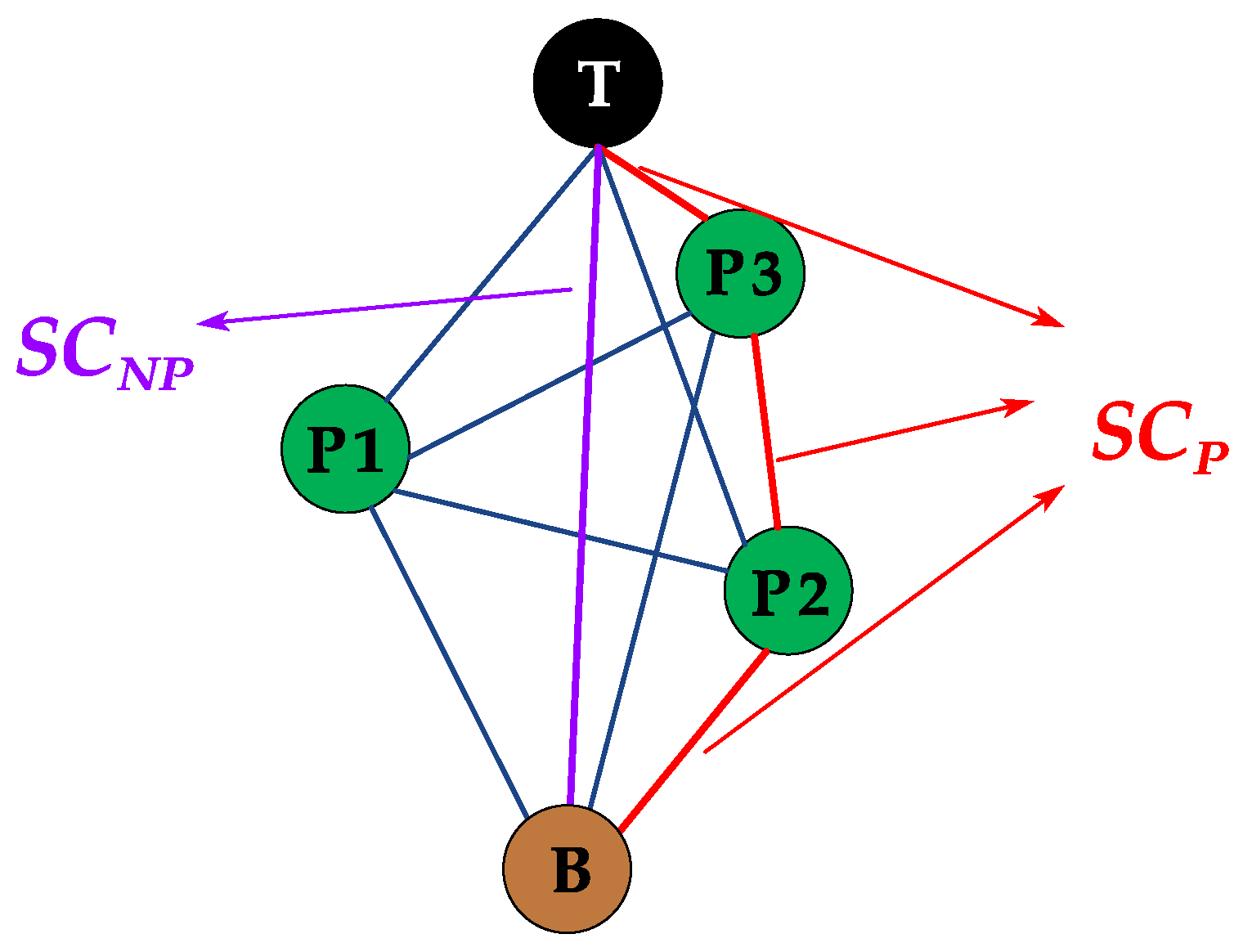
3.2.3. Flow-Based Sector Resource Availability Network (FSRAN)
- (1)
- Sector model abstraction
- All aircrafts cannot pass through PRDs.
- Aircrafts are not permitted to generate or terminate within the sector, and all aircrafts must enter or exit from the boundaries of the sector.
- The research scope is a single flight level, i.e., the aircraft will not change altitude in the sector, and cannot climb or descend within the sector boundary.
- Aircrafts can approach PRDs at will as long as they do not enter them.
- When an aircraft enters and exits from two neighboring boundaries, an “L”-shaped angle constraint with a length of 5 km is set with the safety viewpoint [45]. In Figure 4, A–D are the pinch angle constraints, and “bottleneck” cells are also depicted when aircrafts are flying in and out from different directions.
- (2)
- Construction of FSRAN
3.3. Flow-Based Sector Resource Availability Calculation Model
| Algorithm 2. The whole FSRA calculation process |
| Input: TFN, Sector Structure, FSRAN |
| Output: FSRA |
| 1. for do |
| 2. |
| 3. (11) |
| 4. Calculate the shortest path of using the Dijkstra algorithm which is the min-cut with PRDs; |
| 5. Calculate shortest path of which is the min-cut without PRDs: |
| (12) |
| 6. Calculate the FSRA for flow f: (13) |
| 7. Calculate the weight corresponding to flow f: (14) |
| 8. Calculate the FSRA of a sector: (15) |
| 9. end for |
3.4. Spatial Autocorrelation Analysis
3.4.1. Global Spatial Autocorrelation Analysis
3.4.2. Local Spatial Autocorrelation Analysis
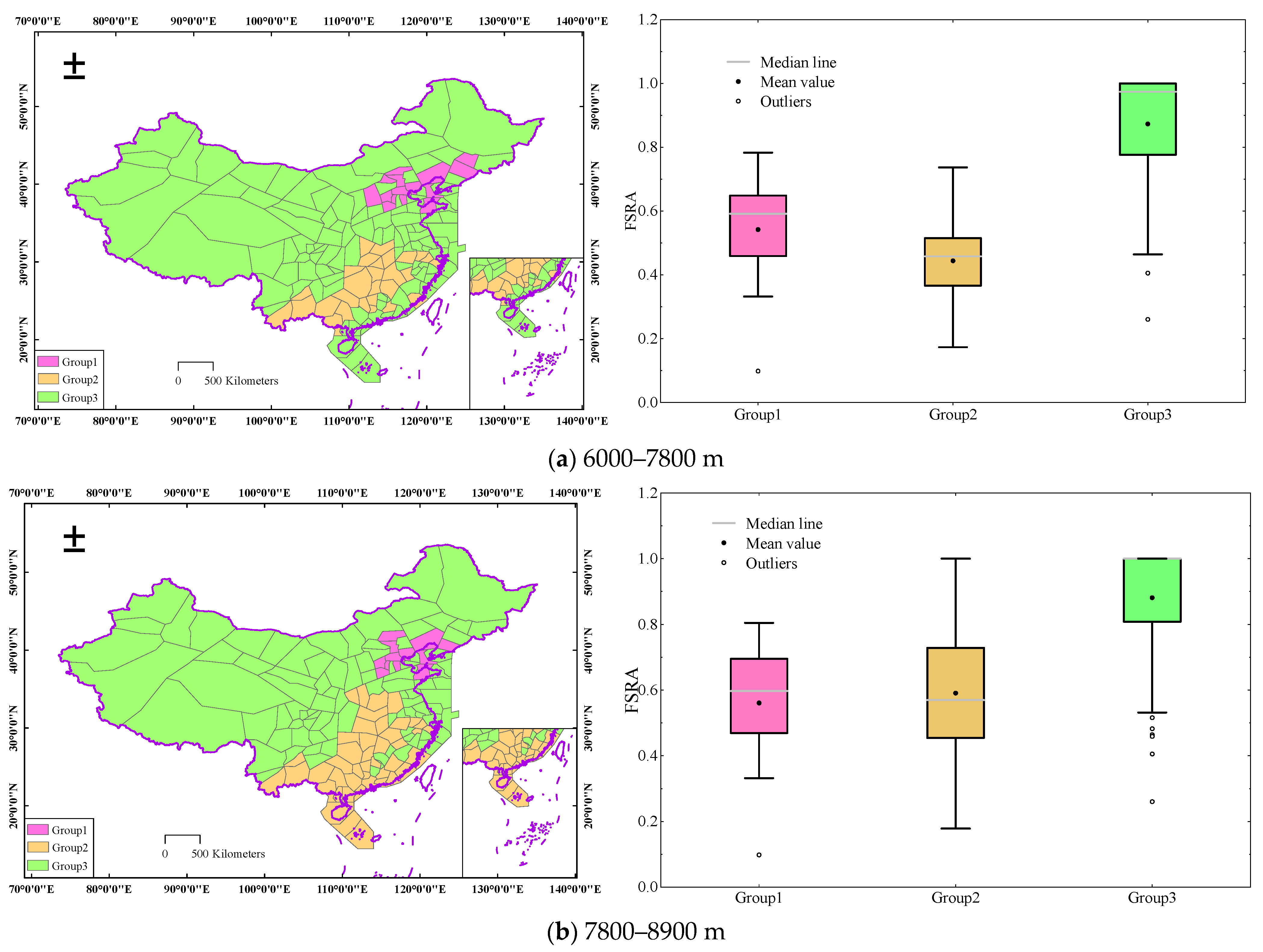
3.5. Spatial Grouping Analysis
4. Results
4.1. FSRA Calculation of an Example Sector
4.2. FSRA Spatial Patterns in Chinese Airspace
4.3. Spatial Autocorrelation Analysis of FSRA
4.3.1. FSRA Spatial Patterns Based on Global Spatial Autocorrelation
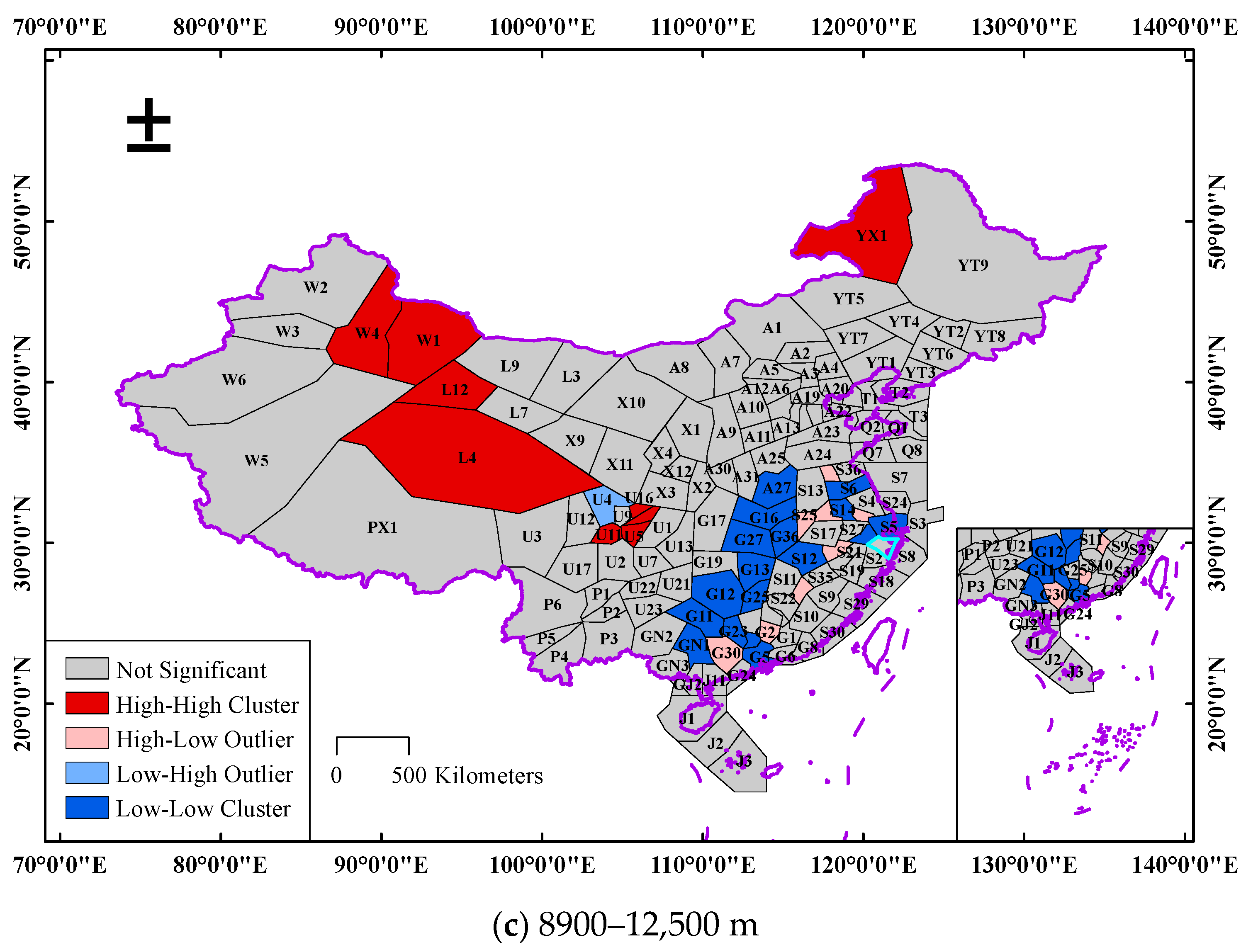
4.3.2. FSRA Spatial Patterns Based on Local Spatial Autocorrelation
4.4. Spatial Grouping Analysis of FSRA
5. Conclusions
- The impact of PRDs and traffic flow on airspace resources. The FSRA is lower when the sector is determined, the density of PRDs is high, the air traffic volume is heavy and the traffic flow pattern is complicated, and the interaction between traffic flow and PRDs and the relationship between PRDs is more complex. When there are fewer PRDs in the sector and the traffic flow pattern is simpler, and the distribution relationship between PRDs and traffic flow is simpler, the FSRA is higher.
- Spatial agglomeration of airspace resource availability in mainland China. From a global spatial perspective, all three altitude ranges significantly reject the null hypothesis, with the largest spatial autocorrelation occurring at 6000–7800 m. From a local spatial perspective, the airspace resource availability of mainland China is split into two distinct agglomerations: a high-value agglomeration concentrated in the western part of China’s airspace, and a low-value agglomeration focused in the southeast. However, there are variances in the distribution of agglomeration areas among the three altitude ranges.
- Spatial distribution characteristics of airspace resource availability in mainland China. The spatial distribution of airspace resource availability in China mainland exhibits substantial regional differences, i.e., the resource availability is lower in the southeast of China’s airspace and is higher in the western and northern portions of China’s airspace. The spatial clustering approach was used, and the three altitude ranges were divided into three groups separately. The grouping results show that the altitude range from 6000 to 7800 m has the best performance in terms of grouping differentiation, with R2 reaching 0.7141. Relevant recommendations are made for various groups to optimize the distribution of airspace resources.
- This paper is a preliminary investigation into the airspace resource availability of China. Future research will focus on a sizable area of continuous airspace with abundant resources to research the FUA with Chinese characteristics by taking into account the development trends of the airspace structure transitioning from fixed to dynamic. In the future, the dynamic real-time monitoring of airspace resources can be carried out based on this method, and research related to dynamic sector division can also be carried out with the objective of balancing sector airspace resources. It is clear from this paper that the airspace resource availability is not only dependent on the size and distribution of the PRDs but is also closely related to traffic flow patterns. As a result, it is possible to study the designation and distribution of PRDs while keeping traffic flow patterns unchanged or to reconfigure routes while keeping the PRDs constant, thereby improving airspace resource availability. This paper proposes a sector capacity calculation method, which can be optimized in the future to carry out research related to sector capacity evaluation. All of the above findings provide new methods and new ideas for ASM.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lintern, G. The airspace as a cognitive system. Int. J. Aviat. Psychol. 2011, 21, 3–15. [Google Scholar] [CrossRef]
- Xu, Z.; Zeng, W.; Chu, X.; Cao, P. Multi-aircraft trajectory collaborative prediction based on social long short-term memory network. Aerospace 2021, 8, 115. [Google Scholar] [CrossRef]
- Lin, Y.; Zhang, J.; Liu, H. Deep learning based short-term air traffic flow prediction considering temporal-spatial correlation. Aerosp. Sci. Technol. 2019, 93, 105113. [Google Scholar] [CrossRef]
- ICAO. Global Air Traffic Management Operational Concept; ICAO: Montreal, Canada, 2005. [Google Scholar]
- Federal Aviation Administration. NAS Operational Evolution Plan; Center for Advanced Aviation System Development: McLean, VA, USA, 2001. [Google Scholar]
- EUROCONTROL. EUROCONTROL Specification for the Application of the Flexible Use of Airspace (FUA); EUROCONTROL Agency: Belgium, France, 2009. [Google Scholar]
- EUROCONTROL. Advanced FUA Concept; EUROCONTROL Agency: Belgium, France, 2015. [Google Scholar]
- Farhadi, F.; Ghoniem, A.; Al-Salem, M. Runway capacity management-an empirical study with application to Doha international airport. Transp. Res. Part E-Logist. Transp. Rev. 2014, 68, 53–63. [Google Scholar] [CrossRef]
- Bertsimas, D.; Gupta, S. Fairness and collaboration in network air traffic flow management: An optimization approach. Transp. Sci. 2016, 50, 57–76. [Google Scholar] [CrossRef]
- Federal Aviation Administration. Aviation System Performance Metrics: Airport Utilization; Center for Advanced Aviation System Development: McLean, VA, USA, 2000. [Google Scholar]
- Wanke, C.; Callaham, M.; Greenbaum, D.; Masalonis, A. Measuring uncertainty in airspace demand predictions for traffic flow management applications. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Austin, TX, USA, 11–14 August 2003; pp. 5708–5718. [Google Scholar]
- Michael, B.; Parimal, K. Combining airspace sectors for the efficient use of air traffic control resources. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; pp. 7222–7236. [Google Scholar]
- Sheth, K.S.; Islam, T.S.; Kopardekar, P.H. Analysis of airspace tube structures. In Proceedings of the 2008 IEEE/AIAA 27th Digital Avionics Systems Conference, St. Paul, MN, USA, 26–30 October 2008; pp. 1–10. [Google Scholar]
- Min, X. Design analysis of corridors-in-the-sky. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; pp. 5859–5869. [Google Scholar]
- Li, Y.; Hu, M.; Xie, H.; Peng, Y. Terminal area utilization rate evaluation based on extension multi-level state classification. Syst. Eng. Electron. 2013, 35, 2534–2539. [Google Scholar]
- Qiu, S.; Yao, D.; Wang, Z. Analysis of low-altitude airspace. J. Phys. Conf. Ser. 2019, 1302, 042032. [Google Scholar] [CrossRef]
- Shi, H.; Zheng, Y.; Zhang, X.; Sun, H. Evaluation of Residual Airspace Resources Based on Civil Aviation Operation Big Data. In Proceedings of the 2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Changsha, China, 20–22 October 2021; pp. 194–198. [Google Scholar]
- Shu, P.; Zheng, Y.; Shi, H.; Liu, S.; Sun, H.; Zhou, X. Three dimensional grid model of airspace resources based on Beidou grid code. In Proceedings of the 2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Changsha, China, 20–22 October 2021; pp. 380–383. [Google Scholar]
- Zhao, Y.; Wang, C.; Li, S.; Zhang, Z. Dependable clustering method of flight trajectory in terminal area based on resampling. J. Southwest Jiaotong Univ. 2017, 52, 817–825+834. [Google Scholar]
- Barratt, S.T.; Kochenderfer, M.J.; Boyd, S.P. Learning probabilistic trajectory models of aircraft in terminal airspace from position data. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3536–3545. [Google Scholar] [CrossRef] [Green Version]
- Zhong, H.; Liu, H.; Qi, G. Analysis of terminal area airspace operation status based on trajectory characteristic point clustering. IEEE Access 2021, 9, 16642–16648. [Google Scholar] [CrossRef]
- Chu, X.; Tan, X.; Zeng, W. A clustering ensemble method of aircraft trajectory based on the similarity matrix. Aerospace 2022, 9, 269. [Google Scholar] [CrossRef]
- Wang, G.; Chen, H.; Liu, K.; Guo, R.; Wei, Y. A flight trajectory prediction method based on trajectory clustering. In Proceedings of the 2019 IEEE 1st International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Kunming, China, 17–19 October 2019; pp. 654–660. [Google Scholar]
- Corrado, S.J.; Puranik, T.G.; Pinon, O.J.; Mavris, D.N. Trajectory clustering within the terminal airspace utilizing a weighted distance function. Proceedings 2020, 59, 7. [Google Scholar]
- Xiao, Y.; Ma, Y.; Ding, H.; Xu, Q. Flight trajectory clustering based on a novel distance from a point to a segment set. In Proceedings of the Fourth International Workshop on Pattern Recognition, Nanjing, China, 31 July 2019; pp. 11–16. [Google Scholar]
- Sun, S.; Wang, C.; Zhao, Y. Parameter independent clustering of air traffic trajectory based on silhouette coefficient. J. Comput. Appl. 2019, 33, 3293–3297. [Google Scholar]
- Olive, X.; Basora, L.; Viry, B.; Alligier, R. Deep Trajectory Clustering with Autoencoders. In Proceedings of the International Conference on Research in Air Transportation, online, 15 September 2020. [Google Scholar]
- Zeng, W.; Xu, Z.; Cai, Z.; Chu, X.; Lu, X. Aircraft trajectory clustering in terminal airspace based on deep autoencoder and Gaussian mixture model. Aerospace 2021, 8, 266. [Google Scholar] [CrossRef]
- Daniel, B. Spatial autocorrelations. Trends Ecol. Evol. 1999, 14, 196. [Google Scholar]
- Anselin, L. Spatial Data Analysis with GIS: An Introduction to Application in the Social Sciences; National Center for Geographic Information and Analysis: Santa Barbara, CA, USA, 1992. [Google Scholar]
- Ulak, M.B.; Ozguven, E.E.; Spainhour, L.; Vanli, O.A. Spatial investigation of aging-involved crashes: A GIS-based case study in Northwest Florida. J. Transp. Geogr. 2017, 58, 71–91. [Google Scholar] [CrossRef]
- Lu, H.; Luo, S.; Li, R. GIS-based spatial patterns analysis of urban road traffic crashes in Shenzhen. China J. Highw. Transp. 2019, 27, 156–164. [Google Scholar]
- Wang, H.; Liu, Z.; Liu, Z.; Wang, X.; Wang, J. GIS-based analysis on the spatial patterns of global maritime accidents. Ocean Eng. 2022, 245, 110569. [Google Scholar] [CrossRef]
- Khalil, A.; Hanich, L.; Hakkou, R.; Lepage, M. GIS-based environmental database for assessing the mine pollution: A case study of an abandoned mine site in Morocco. J. Geochem. Explor. 2014, 144, 468–477. [Google Scholar] [CrossRef]
- Jibran, K.; Konstantinos, K.; Ole, R.; Jørgen, B.; Steen, S.J.; Thomas, E.; Matthias, K. Development and performance evaluation of new AirGIS–A GIS based air pollution and human exposure modelling system. Atmos. Environ. 2019, 198, 102–121. [Google Scholar]
- Jiang, Y.; Li, L.; Groves, C.; Yuan, D.; Kambesis, P. Relationships between rocky desertification and spatial pattern of land use in typical karst area, Southwest China. Environ. Earth Sci. 2009, 59, 881–890. [Google Scholar] [CrossRef]
- Majumder, R.; Bhunia, G.; Patra, P.; Mandal, A.; Ghosh, D.; Shit, P. Assessment of flood hotspot at a village level using GIS-based spatial statistical techniques. Arab. J. Geosci. 2019, 12, 409. [Google Scholar] [CrossRef]
- Naseer, S.; Ul Haq, T.; Khan, A.; Tanoli, J.L.; Khan, N.G.; Qaiser, F.; Shah, S.T.H. GIS-based spatial landslide distribution analysis of district Neelum, AJ&K, Pakistan. Nat. Hazards 2021, 106, 965–989. [Google Scholar]
- Wang, Y. Geographic visualization and spatial analysis of COVID-19 based on GIS. J. Phys.Conf. Ser. 2021, 2006, 012055. [Google Scholar] [CrossRef]
- Cahyadi, M.N.; Handayani, H.H.; Warmadewanthi, I.; Rokhmana, C.A.; Sulistiawan, S.S.; Waloedjo, C.S.; Raharjo, A.B.; Atok, M.; Navisa, S.C.; Wulansari, M.; et al. Spatiotemporal analysis for COVID-19 delta variant using GIS-based air parameter and spatial modeling. Int. J. Environ. Res. Public Health 2022, 19, 1614. [Google Scholar] [CrossRef] [PubMed]
- Scaini, C.; Folch, A.; Bolic, T.; Castelli, L. A GIS-based tool to support air traffic management during explosive volcanic eruptions. Transp. Res. Part C-Emerg. Technol. 2014, 49, 19–31. [Google Scholar] [CrossRef]
- Oktal, H.; Yaman, K.; Kasimbeyli, R. A mathematical programming approach to optimum airspace sectorisation problem. J. Navig. 2020, 73, 599–612. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Wang, L.; Guan, X. Research on potential ground risk regions of aircraft crashes based on ADS-B flight tracking data and GIS. J. Transp. Saf. Secur. 2022, 14, 152–176. [Google Scholar] [CrossRef]
- Nataliani, Y.; Yang, M.S. Powered Gaussian kernel spectral clustering. Neural Comput. Appl. 2019, 31, 557–572. [Google Scholar] [CrossRef]
- Krozel, J.; Mitchell, J.; Polishchuk, V.; Prete, J. Capacity Estimation for Airspaces with Convective Weather Constraints. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 23 August 2007; pp. 6451–6465. [Google Scholar]
- Strang, G. Maximal flow through a domain. Math. Program. 1983, 26, 123–143. [Google Scholar] [CrossRef]
- Gewali, L.P.; Meng, A.C.; Mitchell, J.S.; Ntafos, S. Path planning in 0/1/∞ weighted regions with applications. ORSA J. Comput. 1990, 2, 253–272. [Google Scholar] [CrossRef]
- Chu, Y.; Liu, S. Researching on Grey incidence between logistics industry and economic development. In Proceedings of the International Symposium on Intelligent Information Technology Application Workshops, Shanghai, China, 21 December 2008; pp. 927–931. [Google Scholar]
- Anselin, L.; Sridharan, S.; Gholston, S. Using exploratory spatial data analysis to leverage social indicator databases: The discovery of interesting patterns. Soc. Indic. Res. 2007, 82, 287–309. [Google Scholar] [CrossRef]
- Liu, J.; Shan, C.; Liang, X. Research on spatial aggregation of PM2.5 and zoning control in Tangshan based on GIS. China Environ. Sci. 2020, 40, 513–522. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metadata | Property Description |
|---|---|
| Sector boundary points | Latitude and longitude coordinates constituting sector boundaries |
| Sector altitude | The altitude range of the sector, including minimum and maximum altitude |
| PRD boundary points | Latitude and longitude coordinates constituting PRD boundaries |
| PRD altitude | The altitude range of PRDs, including minimum and maximum altitude |
| Flight trajectories | All ADS-B trajectories in the sector |
| Flow distribution | Latitude and longitude coordinates of the flow |
| Traffic volume | Number of aircraft on the flow |
| Interaction | Interaction among flow, PRDs, and sector boundaries |
| Parameter | Implication |
|---|---|
| F | Set of all the flows in TFN, . |
| P | Set of all the PRDs in sector structure, . |
| f | Flow index, . |
| h | PRD index, . |
| Set of all the elements in FSRAN under flow f, . | |
| Top edge under flow f, . | |
| Bottom edge under flow f, . | |
| Min-cut with PRDs under flow f, . | |
| Min-cut without PRDs under flow f, . | |
| FSRA under flow f, . | |
| The number of aircraft on the flow f, . | |
| Weight of flow f, . | |
| Shortest Euclidean distance between p and q. |
| Parameter of FSRA | Value |
|---|---|
| 7108 | |
| 1792 | |
| 0.799 | |
| 0.201 | |
| 0.736 | |
| 0.939 | |
| 0.777 |
| Parameter of FSRA | Value |
|---|---|
| 6668 | |
| 7156 | |
| 1768 | |
| 0.428 | |
| 0.459 | |
| 0.113 | |
| 1 | |
| 1 | |
| 0.939 | |
| 0.993 |
| Altitude Ranges | Moran’s I | Z Score | p Value |
|---|---|---|---|
| 6000–7800 m | 0.113458 | 3.293467 | 0.000990 |
| 7800–8900 m | 0.089418 | 2.637853 | 0.008343 |
| 8900–12,500 m | 0.087378 | 2.585902 | 0.009712 |
| Altitude Ranges | R2 |
|---|---|
| 6000–7800 m | 0.7141 |
| 7800–8900 m | 0.6926 |
| 8900–12,500 m | 0.6679 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Q.; Hu, M.; Yang, L.; Zhao, Z. GIS-Based Spatial Patterns Analysis of Airspace Resource Availability in China. Aerospace 2022, 9, 763. https://doi.org/10.3390/aerospace9120763
Gao Q, Hu M, Yang L, Zhao Z. GIS-Based Spatial Patterns Analysis of Airspace Resource Availability in China. Aerospace. 2022; 9(12):763. https://doi.org/10.3390/aerospace9120763
Chicago/Turabian StyleGao, Qi, Minghua Hu, Lei Yang, and Zheng Zhao. 2022. "GIS-Based Spatial Patterns Analysis of Airspace Resource Availability in China" Aerospace 9, no. 12: 763. https://doi.org/10.3390/aerospace9120763