
Detection and Recognition of Drones Based on a Deep Convolutional Neural Network Using Visible Imagery

 ,
,
Abstract
:1. Introduction
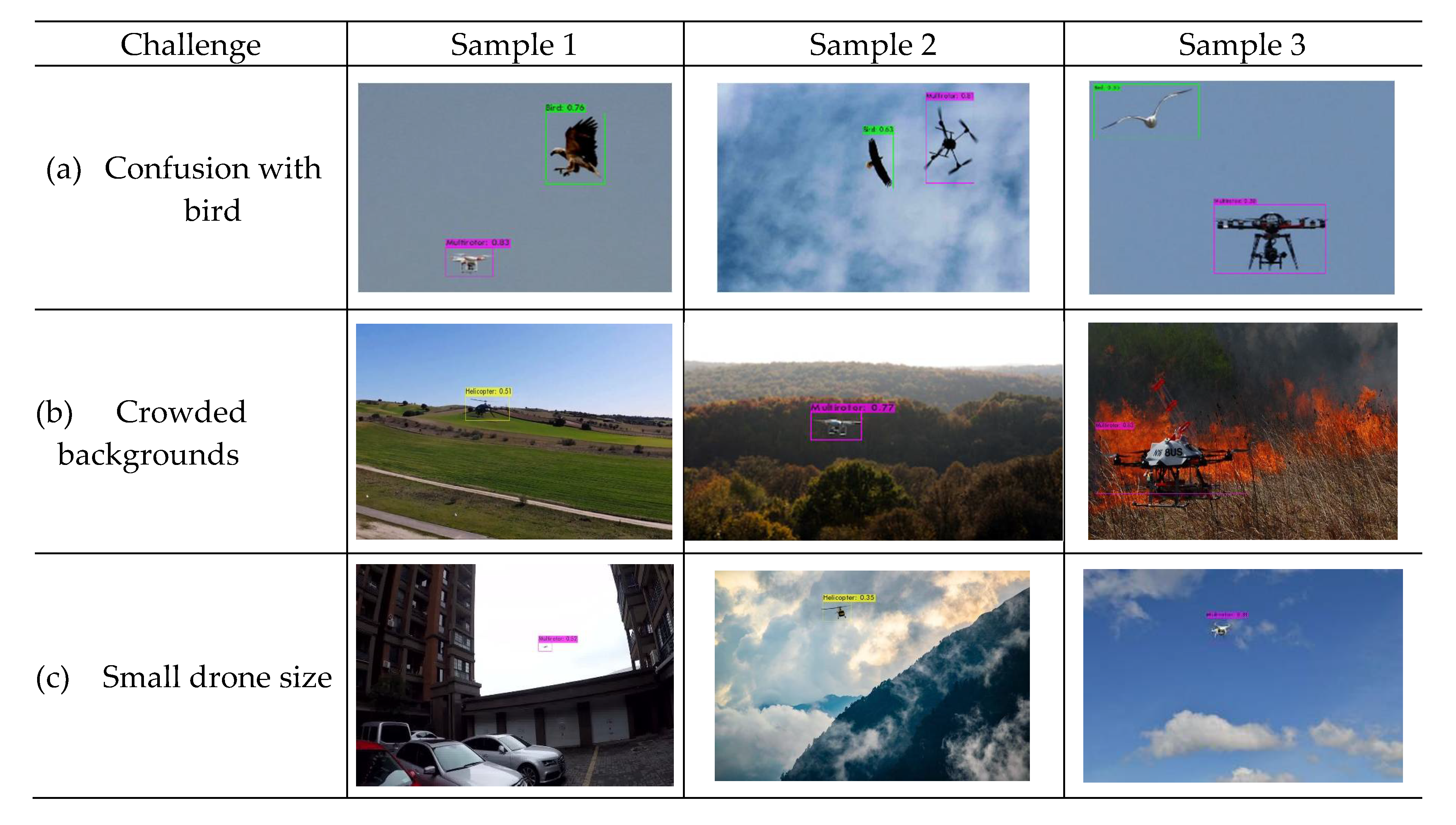
1.1. Drone Detection and Recognition Challenges
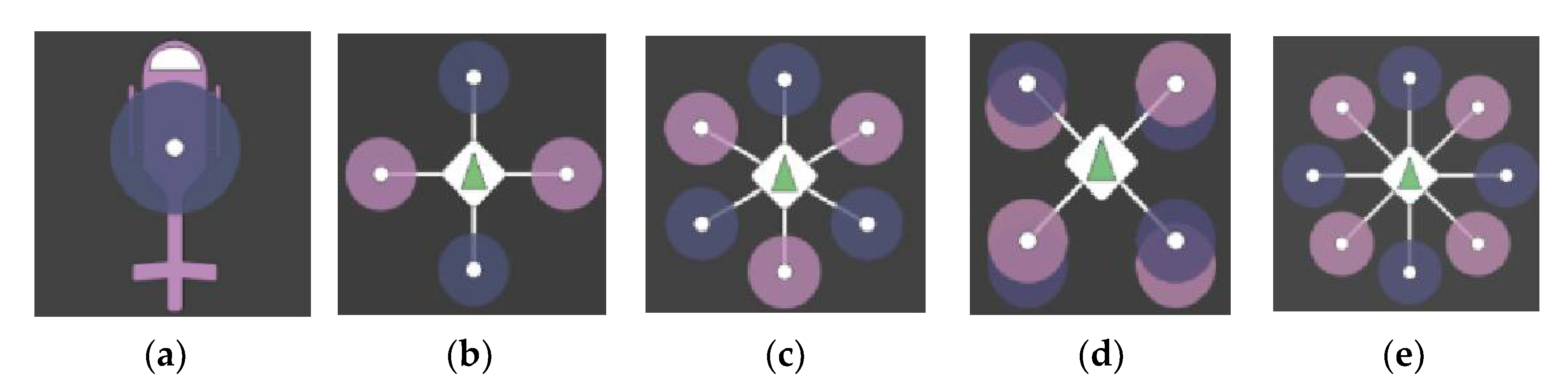
1.1.1. The Resemblance of Drones and Birds
1.1.2. Different Weather Conditions and Crowded Background
1.1.3. Small Size of Drones at Long Distances
1.1.4. Lack of Scalability
2. Related Works
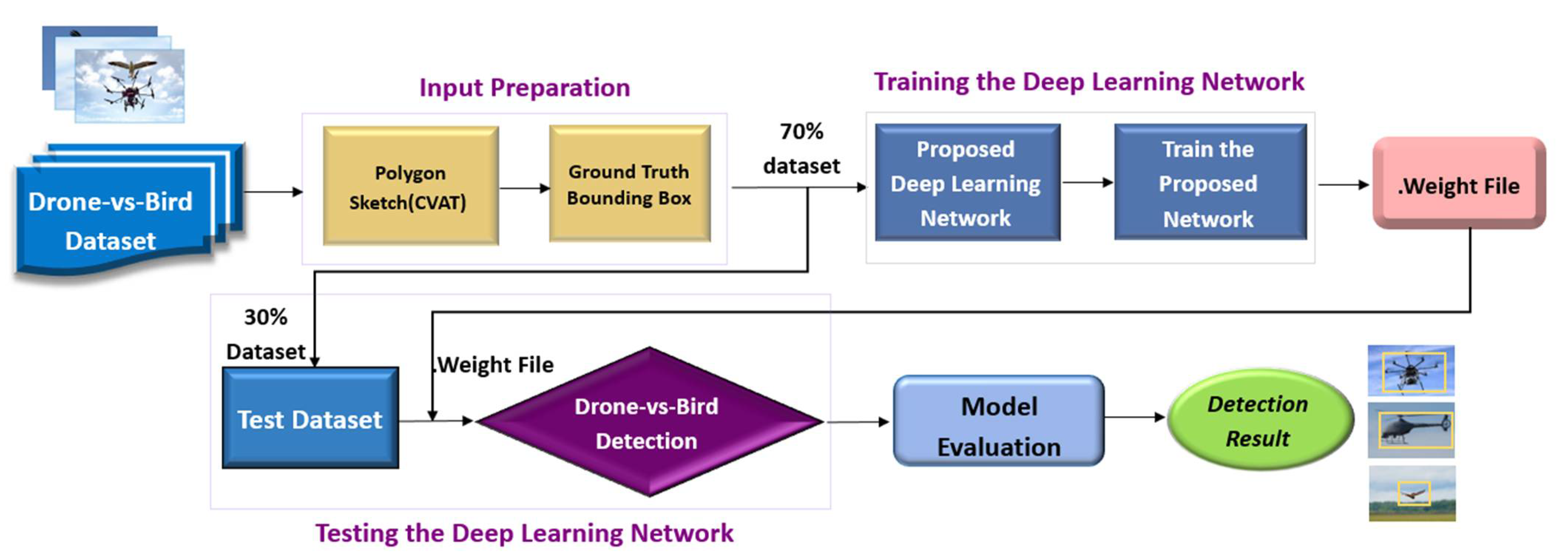
3. Materials and Methods
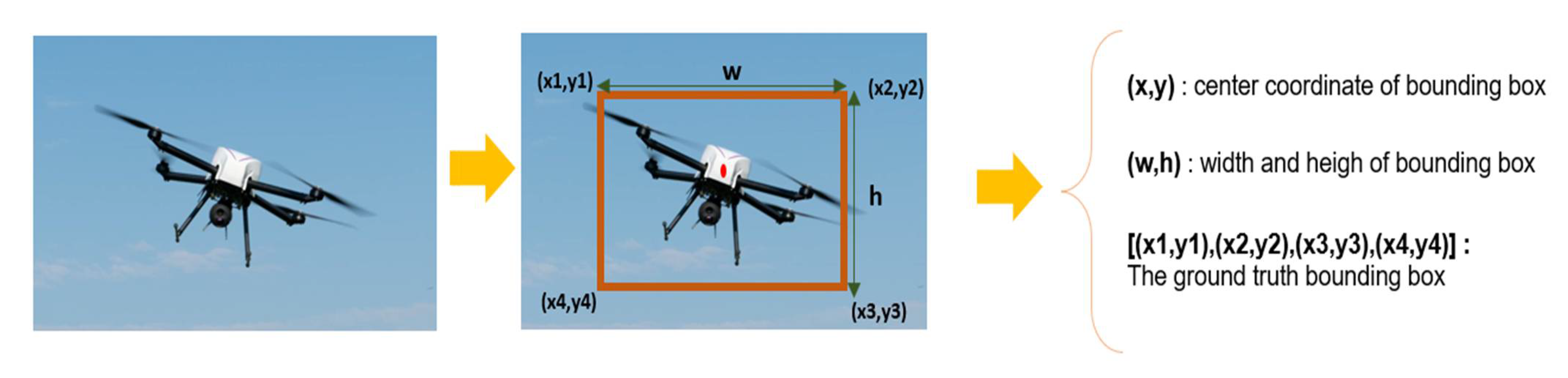
3.1. Input Preparation
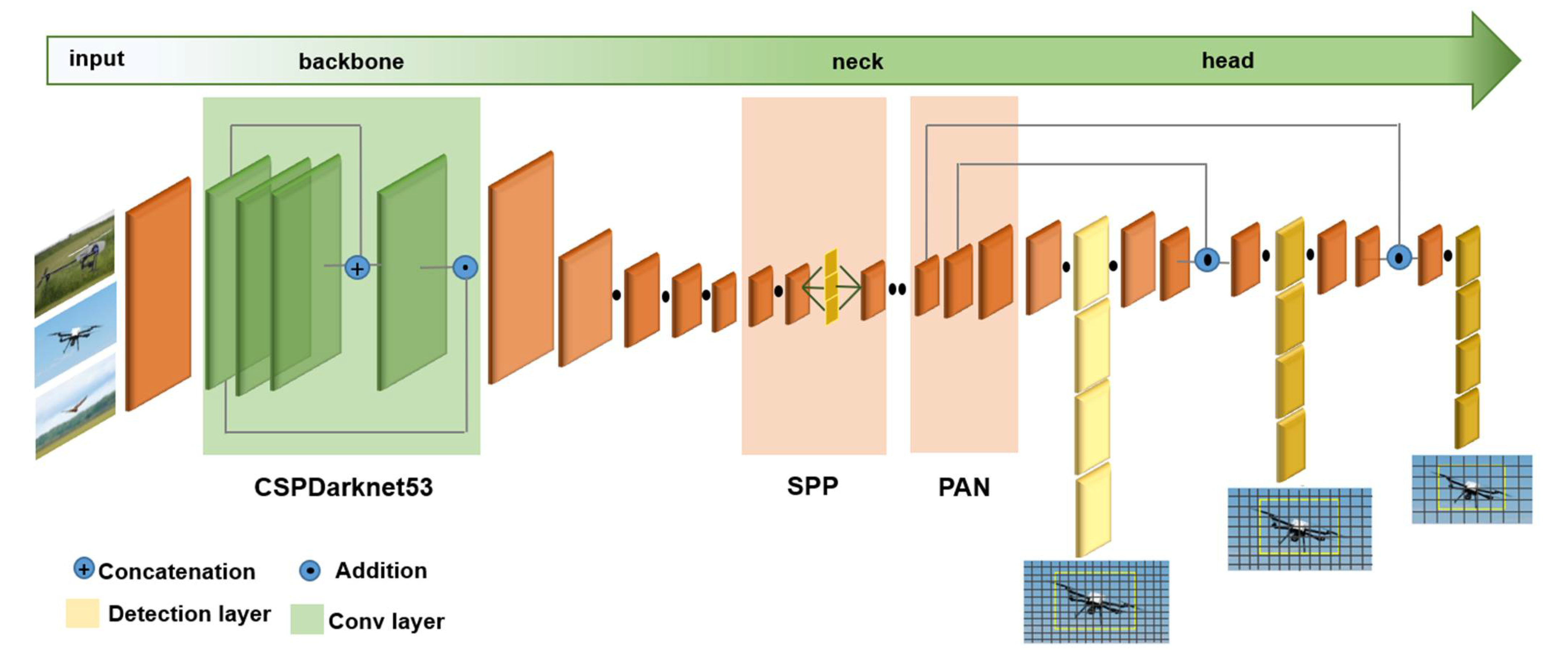
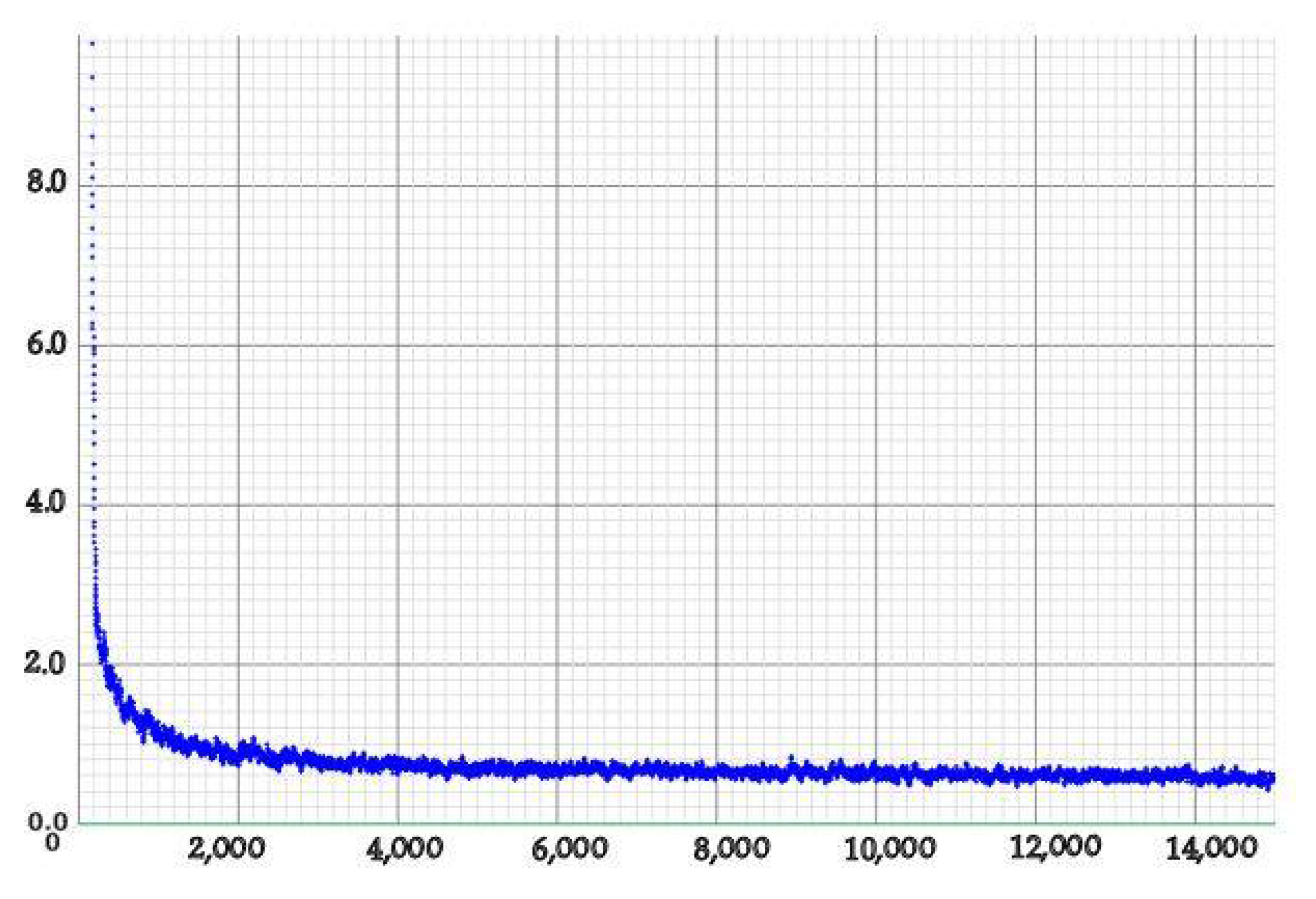
3.2. Training the Deep Learning Network
3.2.1. Backbone; Feature Map Extractor
- CSPDarknet53
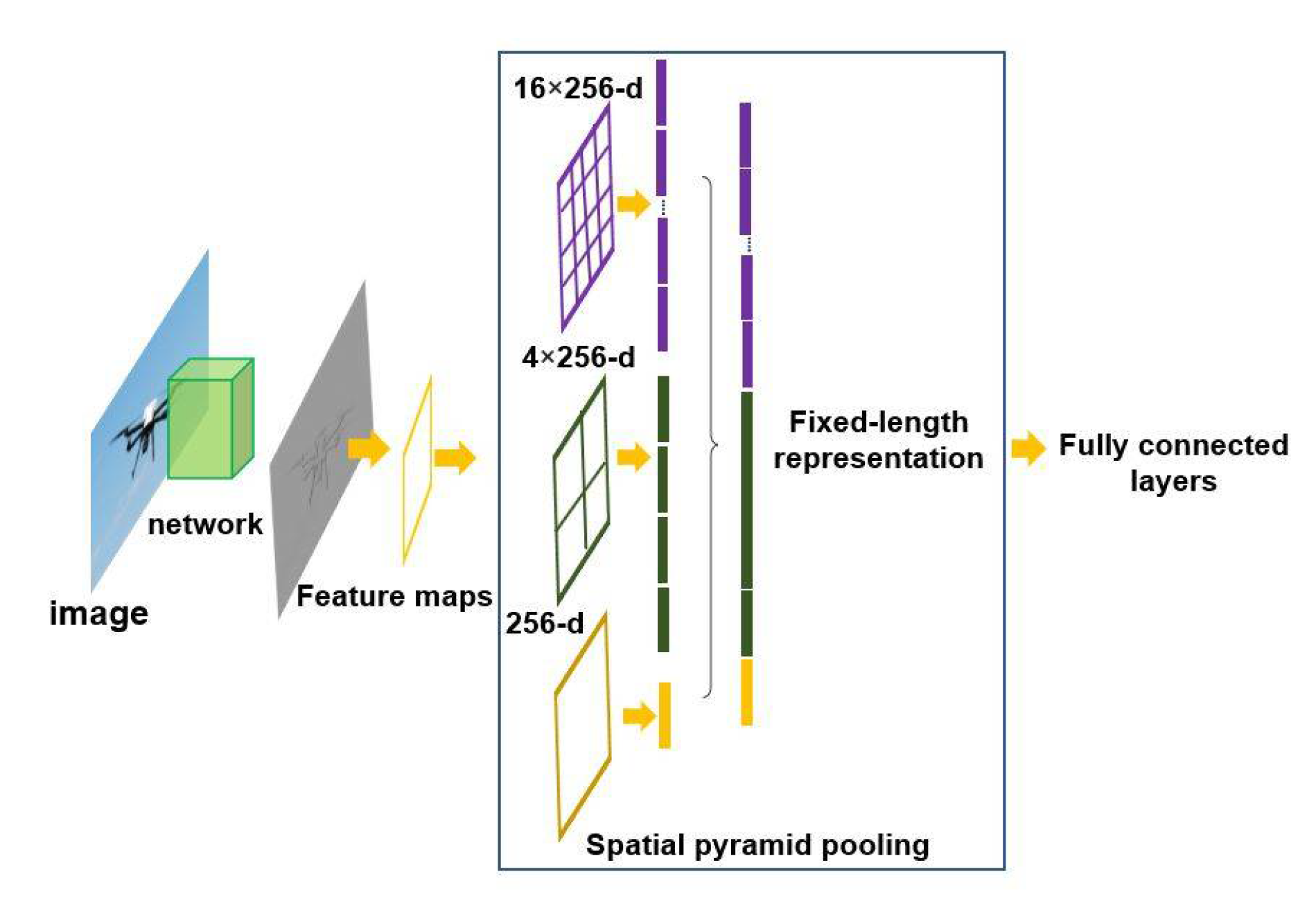
3.2.2. Neck; Feature Map Collector
3.2.3. Head; Detection and Recognition Results
- Bag of Freebies (BoF)
- 2.
- Bag of Specials (BoS)
3.3. Testing the Deep Learning Network
3.4. Evaluation Metrics
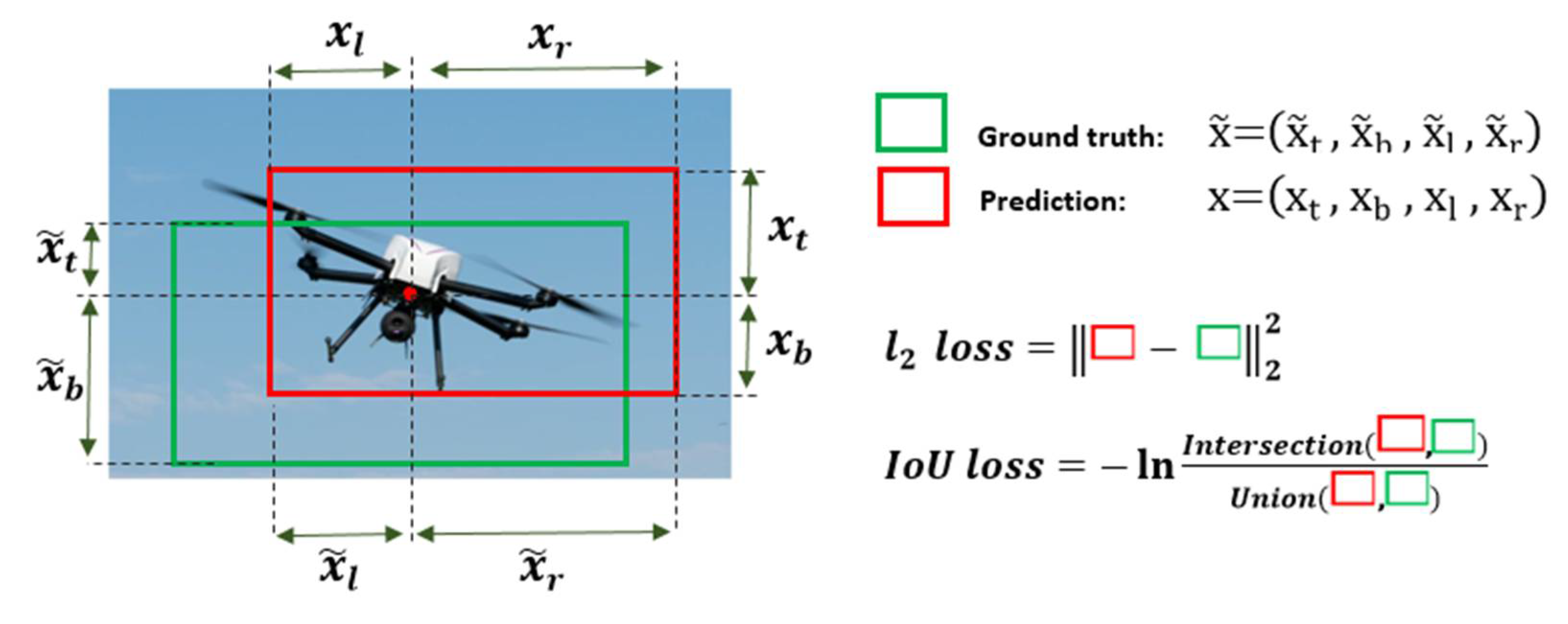
- IoU (Intersection over Union). This evaluation metric means the degree of overlap between the predicted bounding box and the ground truth bounding box. In this study, a threshold of 0.7 was used to classify the input data. This means that if the IoU value is more than 0.7, the classification is True Positive (TP) and otherwise False Positive (FP). Using the number of these values, a complexity matrix was formed, and the rest of the evaluation metrics were calculated using it.
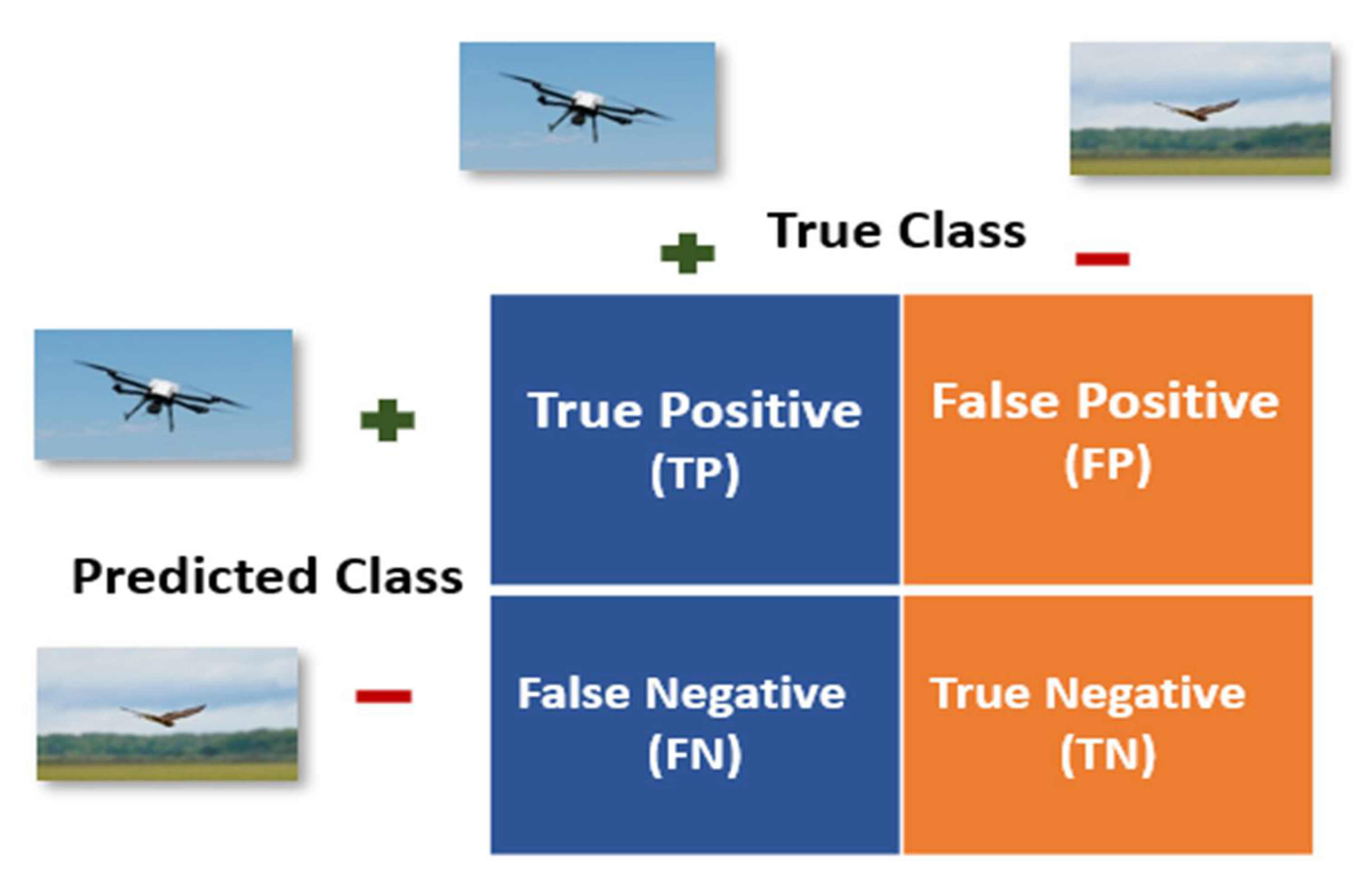
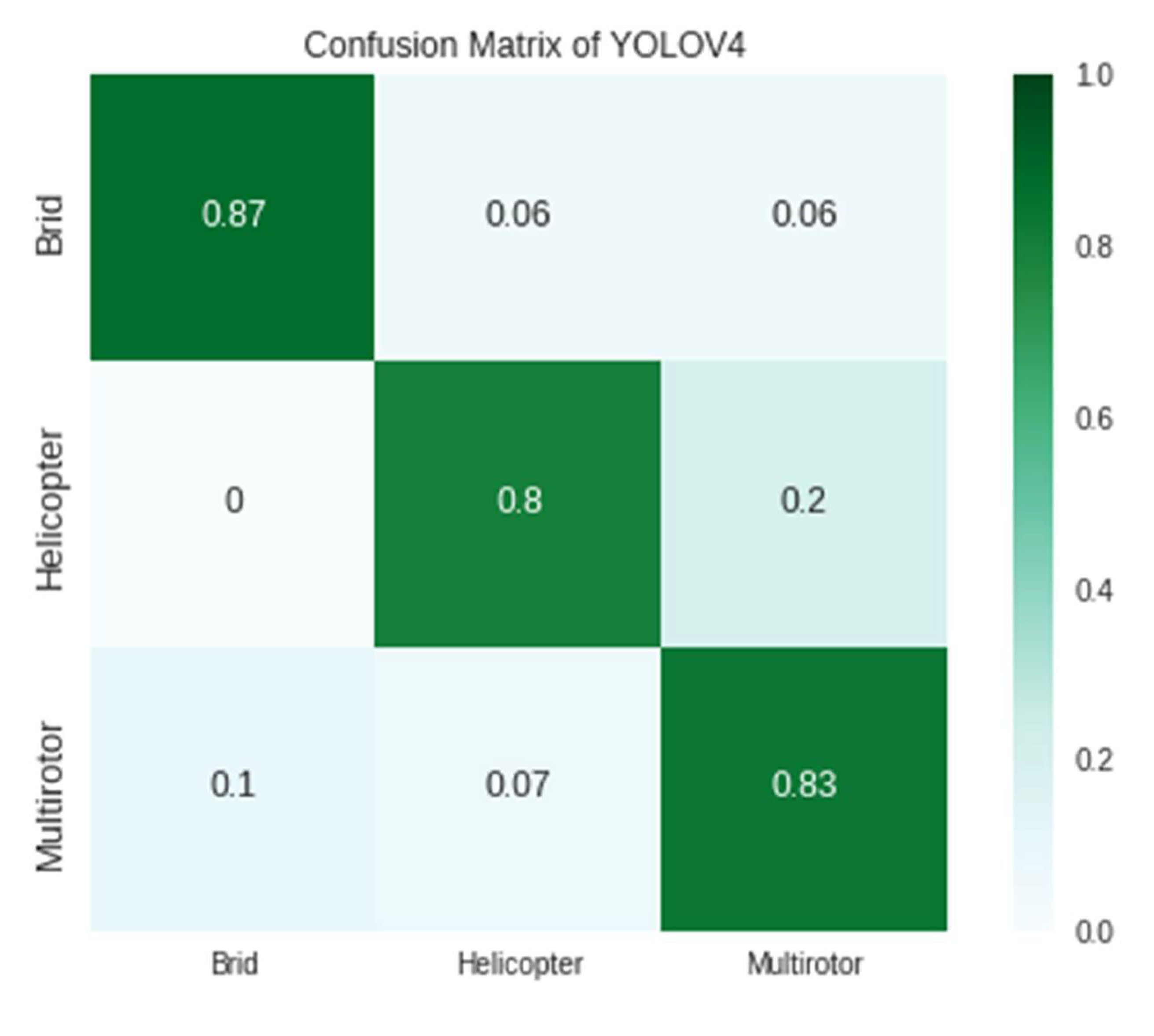
- Confusion matrix. This is a matrix of size n × n (n = number of classes) to show how accurate the model works [59]. The columns of this matrix represent the true class of intended objects, which in this case includes two types of drones and birds. On the other hand, the rows of this matrix represent the predicted classes by the proposed deep learning model. For a better explanation of the confusion matrix in this application, an example of the confusion matrix 2 × 2 is shown in Figure 11. The positive class is related to drones, and the negative class is related to birds. Since this study involves three classes, this matrix is generalized to a size of 3 × 3. Precision, recall, F1-score, and accuracy can be calculated using FN, TN, TP, and FP values.
- Precision means that among the inputs whose class is predicted to be positive, what percentage of them are actually positive class members [59]. According to Equation (3), the value of this metric is between zero and one. Precision is calculated separately for each of the classes. In this study, precision is defined in each of the multirotor, helicopter, and bird classes. For instance, the precision of the multirotor class means that of all the inputs projected as multirotor, what percentage are actually multirotor. Similarly, these criteria are defined for other classes.
- mAP is determined by calculating the average precision of the multirotor, helicopter, and bird classes. In other words, the mAP evaluation metric compares the ground truth bounding box with the predicted bounding box of the targets and calculates a certain value as the score. An increase in this number indicates the more accurate performance of the proposed model in detection and recognition (Equation (4)).
- Recall indicates the percentage of the total data in the positive class, which is predicted to be positive [59]. Similar to the concept of precision, recall is calculated separately for each class. For example, the recall in the multirotor class means that among all the entries that are multirotor, what percentage of them are correctly detected and recognized as multirotor (Equation (5)).
- Accuracy shows the overall performance of the model [59]. Accuracy means that the proposed model correctly detects and recognizes what percentage of the data is truly positive and negative. In this study, accuracy means that the deep learning model correctly detects the percentage of the input data class (multirotor, helicopter, and bird).
4. Experiments and Result
4.1. Data Acquisition and Model Implementation
4.2. Evaluation of the Proposed Method
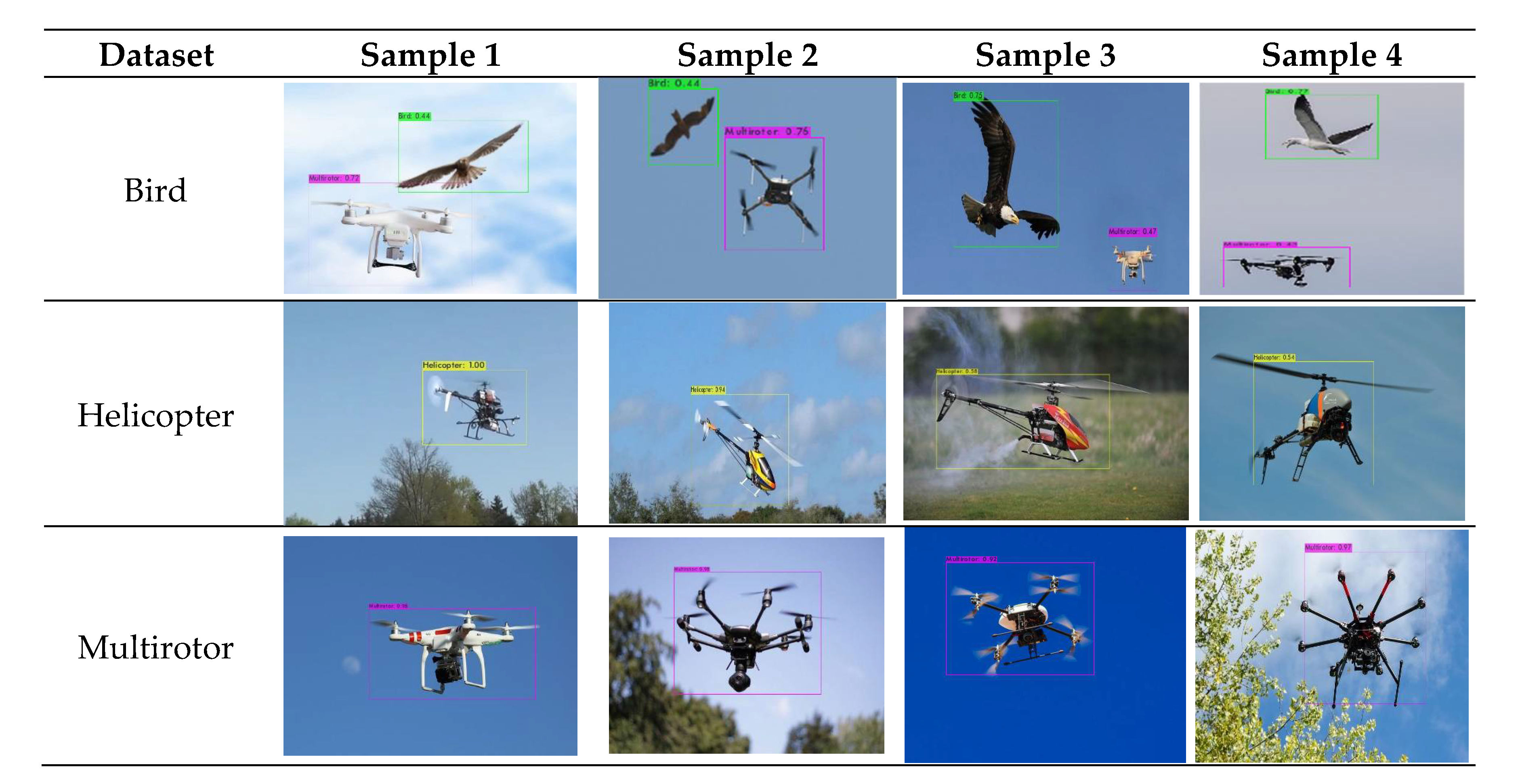
4.3. Model Evaluation in Addressing the Challenges
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shi, X.; Weige, X.; Yang, C.; Shi, Z.; Chen, J. Synthesis: Anti-Drone System with Multiple Surveillance Technologies: Architecture, Implementation, and Challenges. IEEE Commun. Mag. 2018, 56, 68–74. [Google Scholar] [CrossRef]
- Anwar, M.; Kaleem, Z.; Jamalipour, A. Machine Learning Inspired Sound-Based Amateur Drone Detection for Public Safety Applications. IEEE Trans. Veh. Technol. 2019, 68, 2526–2534. [Google Scholar] [CrossRef]
- Sathyamoorthy, D. A Review of Security Threats of Unmanned Aerial Vehicles and Mitigation Steps. J. Def. Secur. 2015, 6, 81–97. [Google Scholar]
- Zwęgliński, T. The Use of Drones in Disaster Aerial Needs Reconnaissance and Damage Assessment–Three-Dimensional Modeling and Orthophoto Map Study. Sustainability 2020, 12, 6080. [Google Scholar] [CrossRef]
- Hayeri Khyavi, M. Rescue Network: Using UAVs (Drones) in Earthquake Crisis Management. arXiv 2021, arXiv:2105.07172. [Google Scholar]
- Gomez, C.; Purdie, H. UAV-based Photogrammetry and Geocomputing for Hazards and Disaster Risk Monitoring—A Review. Geoenviron. Disasters 2016, 3, 23. [Google Scholar] [CrossRef] [Green Version]
- Yaacoub, J.-P.; Noura, H.; Salman, O.; Chehab, A. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 100218. [Google Scholar] [CrossRef]
- Solodov, A.A.; Williams, A.D.; Al Hanaei, S.; Goddard, B. Analyzing the threat of unmanned aerial vehicles (UAV) to nuclear facilities. Secur. J. 2018, 31, 305–324. [Google Scholar] [CrossRef]
- Pyrgies, J. The UAVs threat to airport security: Risk analysis and mitigation. J. Airl. Airpt. Manag. 2019, 9, 63. [Google Scholar] [CrossRef] [Green Version]
- Shvetsova, S.V.; Shvetsov, A.V. Ensuring safety and security in employing drones at airports. J. Transp. Secur. 2021, 14, 41–53. [Google Scholar] [CrossRef]
- Park, S.; Kim, H.; Lee, S.; Joo, H.; Kima, H. Survey on Anti-Drone Systems: Components, Designs, and Challenges. IEEE Access 2021, 9, 42635–42659. [Google Scholar] [CrossRef]
- Drozdowicz, J.; Wielgo, M.; Samczynski, P.; Kulpa, K.; Krzonkalla, J.; Mordzonek, M.; Bryl, M.; Jakielaszek, Z. 35 GHz FMCW drone detection system. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016; pp. 1–4. [Google Scholar]
- Semkin, V.; Yin, M.; Hu, Y.; Mezzavilla, M.; Rangan, S. Drone Detection and Classification Based on Radar Cross Section Signatures. In Proceedings of the 2020 International Symposium on Antennas and Propagation (ISAP), Osaka, Japan, 25–28 January 2021; pp. 223–224. [Google Scholar]
- de Haag, M.U.; Bartone, C.G.; Braasch, M.S. Flight-test evaluation of small form-factor LiDAR and radar sensors for sUAS detect-and-avoid applications. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–29 September 2016; pp. 1–11. [Google Scholar]
- Nguyen, P.; Ravindranatha, M.; Nguyen, A.; Han, R.; Vu, T. Investigating cost-effective rf-based detection of drones. In Proceedings of the 2nd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Singapore, 26 June 2016; pp. 17–22. [Google Scholar]
- Basak, S.; Rajendran, S.; Pollin, S.; Scheers, B. Combined RF-based drone detection and classification. IEEE Trans. Cogn. Commun. Netw. 2021, 1. [Google Scholar] [CrossRef]
- Mezei, J.; Fiaska, V.; Molnár, A. Drone sound detection. In Proceedings of the 2015 16th IEEE International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 19–21 November 2015; pp. 333–338. [Google Scholar]
- Svanström, F.; Englund, C.; Alonso-Fernandez, F. Real-Time Drone Detection and Tracking With Visible, Thermal and Acoustic Sensors. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 7265–7272. [Google Scholar]
- Andraši, P.; Radišić, T.; Muštra, M.; Ivošević, J. Night-time detection of uavs using thermal infrared camera. Transp. Res. Procedia 2017, 28, 183–190. [Google Scholar] [CrossRef]
- Seidaliyeva, U.; Alduraibi, M.; Ilipbayeva, L.; Almagambetov, A. Detection of loaded and unloaded UAV using deep neural network. In Proceedings of the 2020 Fourth IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 9–11 November 2020; pp. 490–494. [Google Scholar]
- Behera, D.K.; Raj, A.B. Drone Detection and Classification using Deep Learning. In Proceedings of the 2020 4th International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 13–15 May 2020; pp. 1012–1016. [Google Scholar]
- Isaac-Medina, B.K.; Poyser, M.; Organisciak, D.; Willcocks, C.G.; Breckon, T.P.; Shum, H.P. Unmanned aerial vehicle visual detection and tracking using deep neural networks: A performance benchmark. arXiv 2021, arXiv:2103.13933. [Google Scholar]
- Liu, H.; Qu, F.; Liu, Y.; Zhao, W.; Chen, Y. A drone detection with aircraft classification based on a camera array. IOP Conf. Ser. Mater. Sci. Eng. 2018, 322, 052005. [Google Scholar] [CrossRef]
- Ye, D.H.; Li, J.; Chen, Q.; Wachs, J.; Bouman, C. Deep learning for moving object detection and tracking from a single camera in unmanned aerial vehicles (UAVs). Electron. Imaging 2018, 2018, 4661–4666. [Google Scholar] [CrossRef] [Green Version]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Processing Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 580–587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Processing Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [Green Version]
- Rozantsev, A.; Lepetit, V.; Fua, P. Flying objects detection from a single moving camera. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 4128–4136. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 21–37. [Google Scholar]
- Zhao, Z.-Q.; Zheng, P.; Xu, S.-T.; Wu, X. Object detection with deep learning: A review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Blake, W.; Burger, I. Small Drone Detection Using Airborne Weather Radar. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–4. [Google Scholar]
- Liu, H.; Fan, K.; Ouyang, Q.; Li, N. Real-Time Small Drones Detection Based on Pruned YOLOv4. Sensors 2021, 21, 3374. [Google Scholar] [CrossRef] [PubMed]
- De Quevedo, Á.D.; Urzaiz, F.I.; Menoyo, J.G.; López, A.A. Drone Detection with X-Band Ubiquitous Radar. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; pp. 1–10. [Google Scholar]
- Gao, Q.; Parslow, A.; Tan, M. Object motion detection based on perceptual edge tracking. In Proceedings of the Second International Workshop on Digital and Computational Video, Tampa, FL, USA, 8–9 February 2001; pp. 78–85. [Google Scholar]
- Lai, J.; Mejias, L.; Ford, J. Airborne Vision-Based Collision-Detection System. J. Field Robot. 2011, 28, 137–157. [Google Scholar] [CrossRef] [Green Version]
- Ganti, S.R.; Kim, Y. Implementation of detection and tracking mechanism for small UAS. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1254–1260. [Google Scholar]
- Li, J.; Ye, D.H.; Chung, T.; Kolsch, M.; Wachs, J.; Bouman, C. Multi-target detection and tracking from a single camera in Unmanned Aerial Vehicles (UAVs). In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4992–4997. [Google Scholar]
- Wu, Y.; Sui, Y.; Wang, G. Vision-Based Real-Time Aerial Object Localization and Tracking for UAV Sensing System. IEEE Access 2017, 5, 23969–23978. [Google Scholar] [CrossRef]
- Schumann, A.; Sommer, L.; Klatte, J.; Schuchert, T.; Beyerer, J. Deep cross-domain flying object classification for robust UAV detection. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar]
- Saqib, M.; Khan, S.D.; Sharma, N.; Blumenstein, M. A study on detecting drones using deep convolutional neural networks. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–5. [Google Scholar]
- Aker, C.; Kalkan, S. Using deep networks for drone detection. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar]
- Suresh Arunachalam, T.; Shahana, R.; Vijayasri, R.; Kavitha, T. Flying Object Detection and Classification using Deep Neural Networks. Int. J. Adv. Eng. Res. Sci. 2019, 6, 180–183. [Google Scholar] [CrossRef]
- Nalamati, M.; Kapoor, A.; Saqib, M.; Sharma, N.; Blumenstein, M. Drone Detection in Long-Range Surveillance Videos. In Proceedings of the 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, 18–21 September 2019; pp. 1–6. [Google Scholar]
- Shi, Q.; Li, J. Objects Detection of UAV for Anti-UAV Based on YOLOv4. In Proceedings of the 2020 IEEE 2nd International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Weihai, China, 14–16 October 2020; pp. 1048–1052. [Google Scholar]
- Kavitha, T.; Lakshmi, K. Evaluation of the Performance of Tiny YOLOv3 based Drone Detection System with Different Drone Datasets. J. Crit. Rev. 2020, 7, 835–848. [Google Scholar] [CrossRef]
- Ashraf, M.W.; Sultani, W.; Shah, M. Dogfight: Detecting Drones from Drones Videos. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 7067–7076. [Google Scholar]
- Xun, D.T.W.; Lim, Y.L.; Srigrarom, S. Drone detection using YOLOv3 with transfer learning on NVIDIA Jetson TX2. In Proceedings of the 2021 Second International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 20–22 January 2021; pp. 1–6. [Google Scholar]
- Singha, S.; Aydin, B. Automated Drone Detection Using YOLOv4. Drones 2021, 5, 95. [Google Scholar] [CrossRef]
- Coluccia, A.; Fascista, A.; Schumann, A.; Sommer, L.; Dimou, A.; Zarpalas, D.; Méndez, M.; De la Iglesia, D.; González, I.; Mercier, J.-P. Drone vs. Bird Detection: Deep Learning Algorithms and Results from a Grand Challenge. Sensors 2021, 21, 2824. [Google Scholar] [CrossRef]
- Wang, C.-Y.; Liao, H.-Y.M.; Yeh, I.-H.; Wu, Y.-H.; Chen, P.-Y.; Hsieh, J.-W. CSPNet: A New Backbone that can Enhance Learning Capability of CNN. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 1571–1580. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path Aggregation Network for Instance Segmentation. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–28 June 2018; pp. 8759–8768. [Google Scholar]
- Yun, S.; Han, D.; Oh, S.J.; Chun, S.; Choe, J.; Yoo, Y. Cutmix: Regularization strategy to train strong classifiers with localizable features. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 6023–6032. [Google Scholar]
- Ghiasi, G.; Lin, T.-Y.; Le, Q.V. Dropblock: A regularization method for convolutional networks. arXiv 2018, arXiv:1810.12890. [Google Scholar]
- De Boer, P.-T.; Kroese, D.P.; Mannor, S.; Rubinstein, R.Y. A tutorial on the cross-entropy method. Ann. Oper. Res. 2005, 134, 19–67. [Google Scholar] [CrossRef]
- Susmaga, R. Confusion matrix visualization. In Intelligent Information Processing and Web Mining; Springer: Berlin/Heidelberg, Germany, 2004; pp. 107–116. [Google Scholar]
- Redmon, J. Darknet: Open Source Neural Networks in C. 2013–2016. Available online: http://pjreddie.com/darknet/ (accessed on 1 January 2021).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Num of Images | Precision % | Recall % | F1-Score % | Accuracy % | mAP % | IoU % |
|---|---|---|---|---|---|---|---|
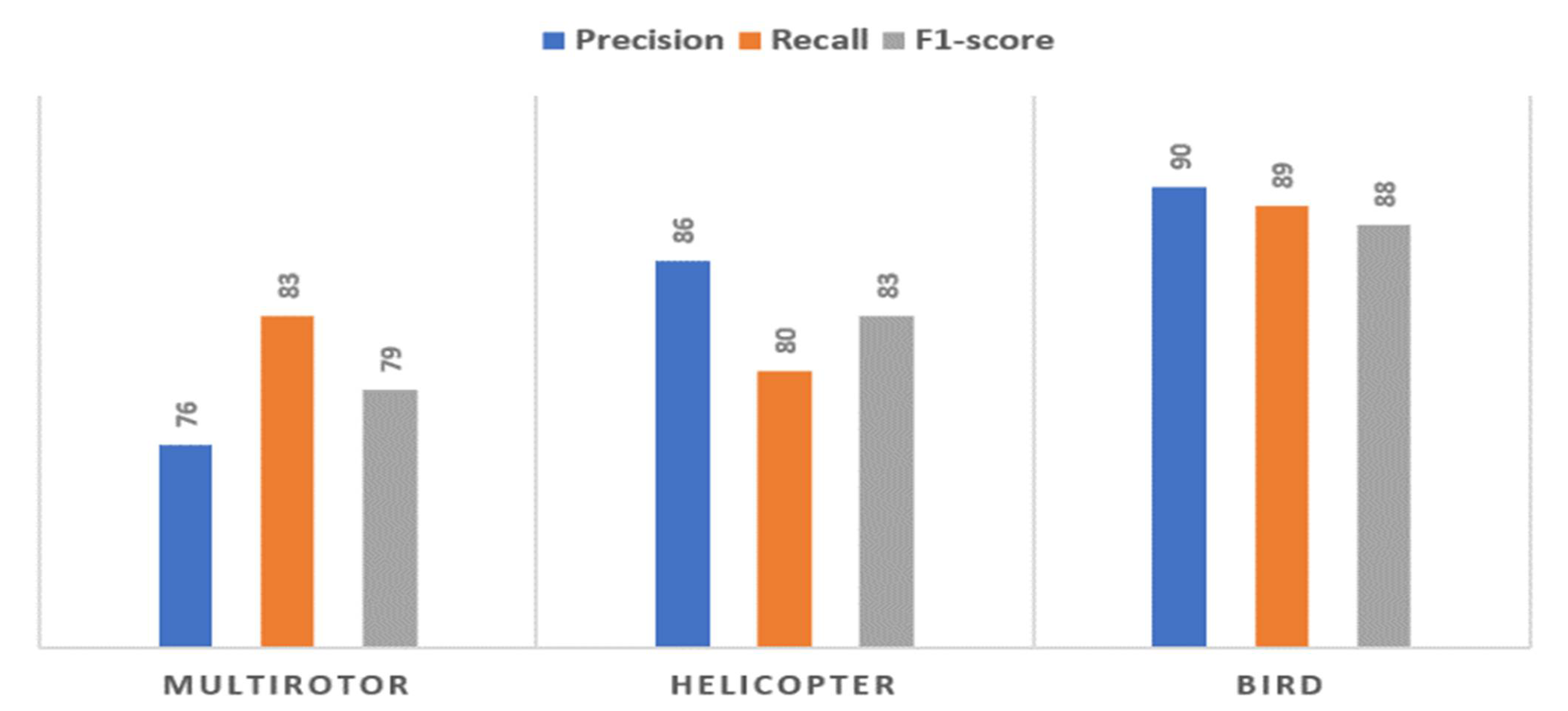
| Bird | 1000 | 90 | 87 | 88 | - | - | - |
| Helicopter | 1000 | 86 | 80 | 83 | - | - | - |
| Multirotor | 1000 | 76 | 83 | 79 | - | - | - |
| Total | 3000 | - | - | - | 83 | 84 | 81 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samadzadegan, F.; Dadrass Javan, F.; Ashtari Mahini, F.; Gholamshahi, M. Detection and Recognition of Drones Based on a Deep Convolutional Neural Network Using Visible Imagery. Aerospace 2022, 9, 31. https://doi.org/10.3390/aerospace9010031
Samadzadegan F, Dadrass Javan F, Ashtari Mahini F, Gholamshahi M. Detection and Recognition of Drones Based on a Deep Convolutional Neural Network Using Visible Imagery. Aerospace. 2022; 9(1):31. https://doi.org/10.3390/aerospace9010031
Chicago/Turabian StyleSamadzadegan, Farhad, Farzaneh Dadrass Javan, Farnaz Ashtari Mahini, and Mehrnaz Gholamshahi. 2022. "Detection and Recognition of Drones Based on a Deep Convolutional Neural Network Using Visible Imagery" Aerospace 9, no. 1: 31. https://doi.org/10.3390/aerospace9010031