
Design Process and Environmental Impact of Unconventional Tail Airliners


Abstract
:1. Introduction
2. Materials and Methods
2.1. Design Strategy and Reference Aircraft
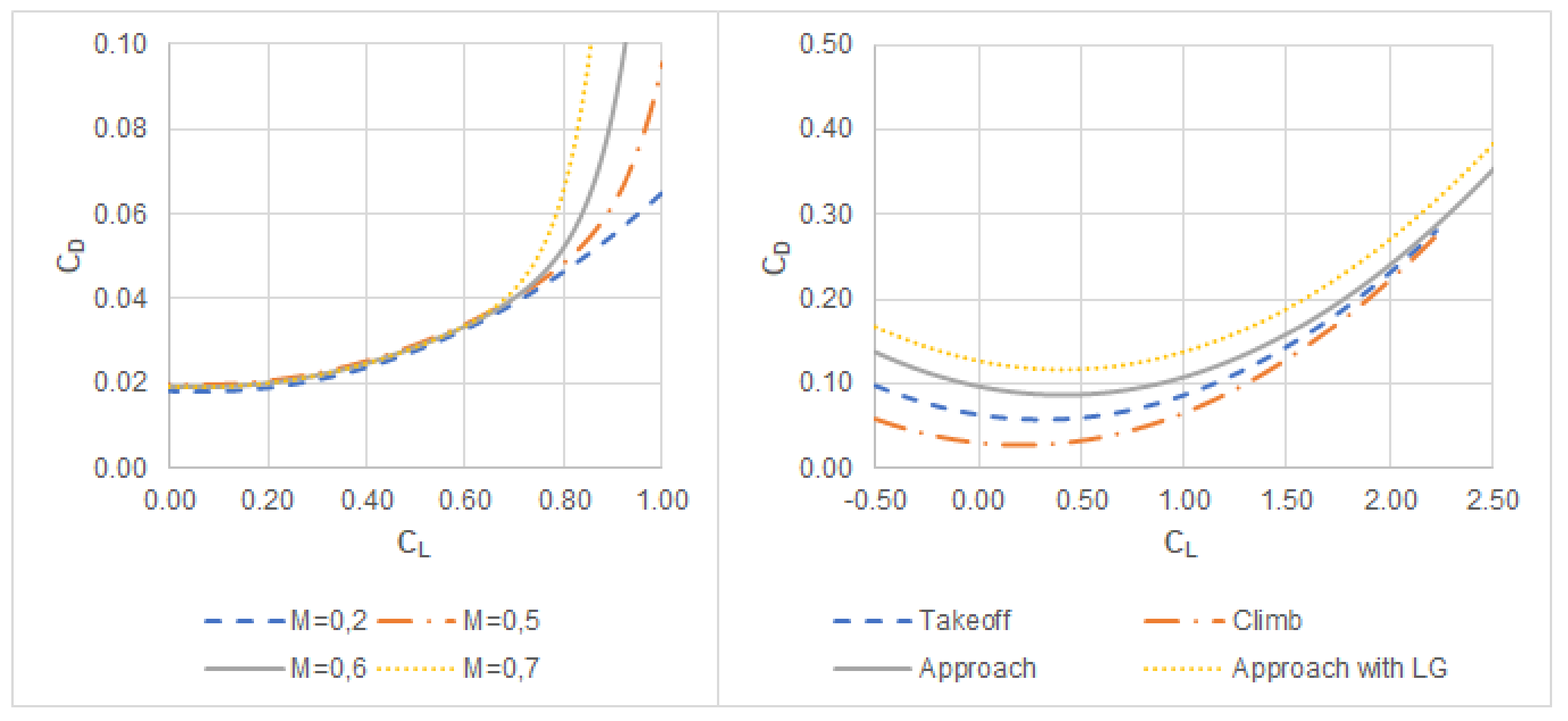
2.2. Aerodynamic Model
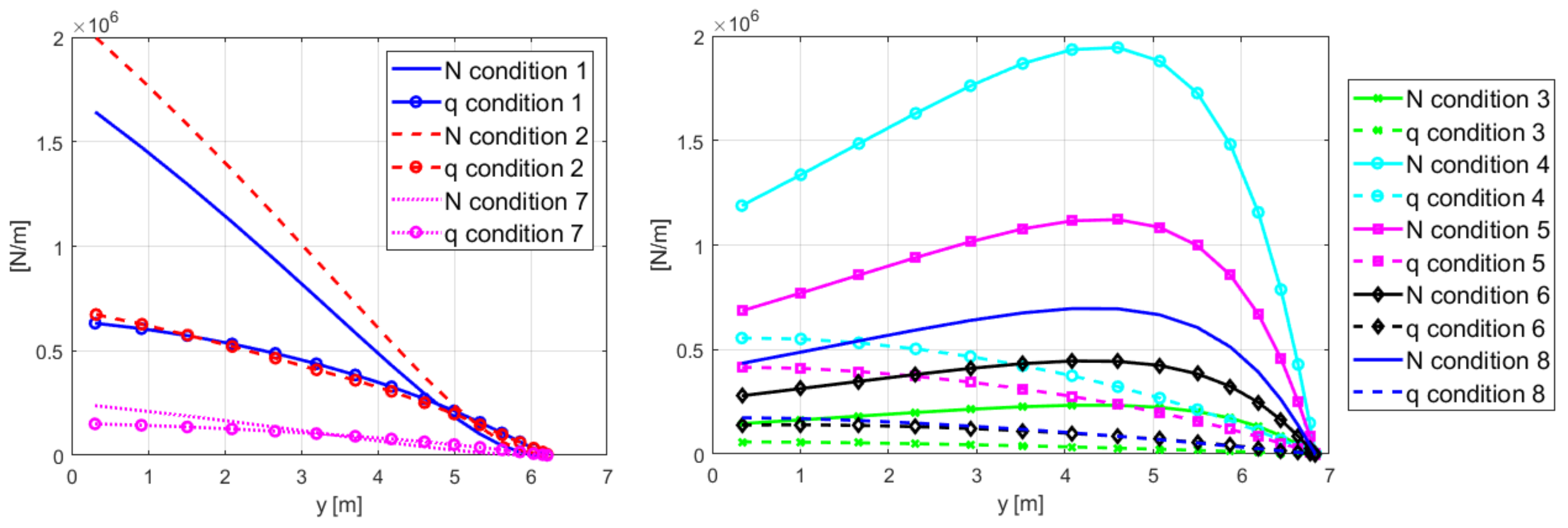
2.3. Load Cases for Tails Design
2.3.1. Symmetric Maneuvers
2.3.2. Gusts Loads
2.3.3. Asymmetric Maneuvers
2.4. Weight Estimation Models
- the torsion box bears bending, shear and torsion;
- the torsion box is approximated by a rectangular geometry, as shown in Figure 2;
- the stringers have Z-shape section, and the relation between width and height is a factor of 0.3;
- the spars are stiffened by vertical elements located every certain distance;
- the caps define the extremes of the spars, and their areas are neglected when comparing to total panel area;
- for each section, extrados and intrados panels have the same geometry (this consideration is taken because the tail surface could generate lift upwards or downwards, depending on the flight condition of the aircraft); and
- the panel is sized for a uniform shear load, corresponding to the maximum that appears in the panel.
2.5. Emissions Models
3. Results
3.1. Test Case for Conventional Tail Configuration
- Steady turn at speed at limit maneuvering load factor at 22,000 ft, as a symmetric steady maneuver.
- Sudden deflection of the elevator in cruising flight at speed at 22,000 ft, as symmetric unchecked maneuver.
- Lateral balancing of the aircraft after critical engine failure in climbing after taking off with no sideslip angle at sea level altitude.
- Flight at speed with 10° sideslip angle, without any deflection of the rudder, at 22,000 ft. This maneuver corresponds to Maneuver 2 of those explained in the asymmetric maneuvers section.
- Flight at speed with 10° of sideslip angle and maximum rudder deflection in the direction opposite to the turn, at 22,000 ft. This maneuver corresponds to Maneuver 3 of those explained in the asymmetric maneuvers section.
- Lateral gust at speed at 22,000 ft.
- Vertical and positive gust at speed at 22,000 ft.
- Flight at speed with zero sideslip angle, but with maximum rudder deflection. This maneuver corresponds to Maneuver 1 of those explained in the asymmetric maneuvers section.
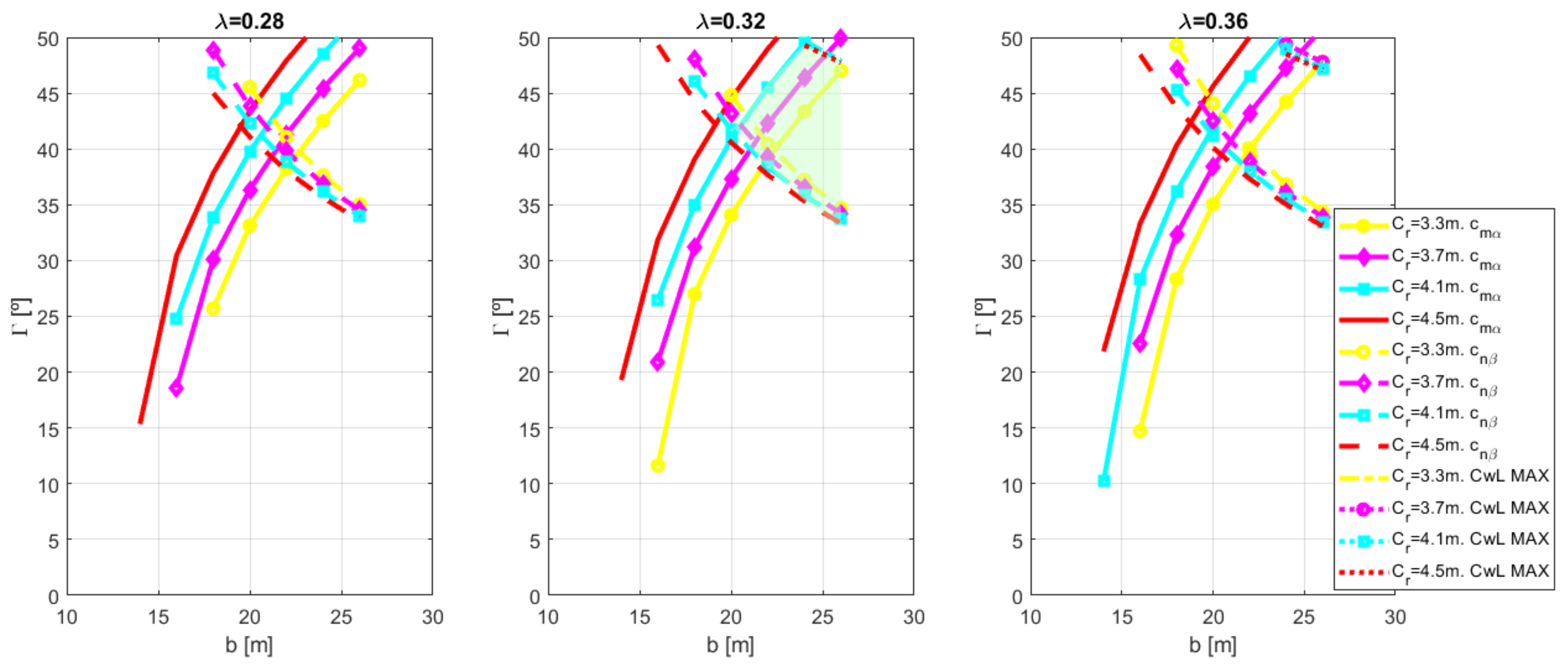
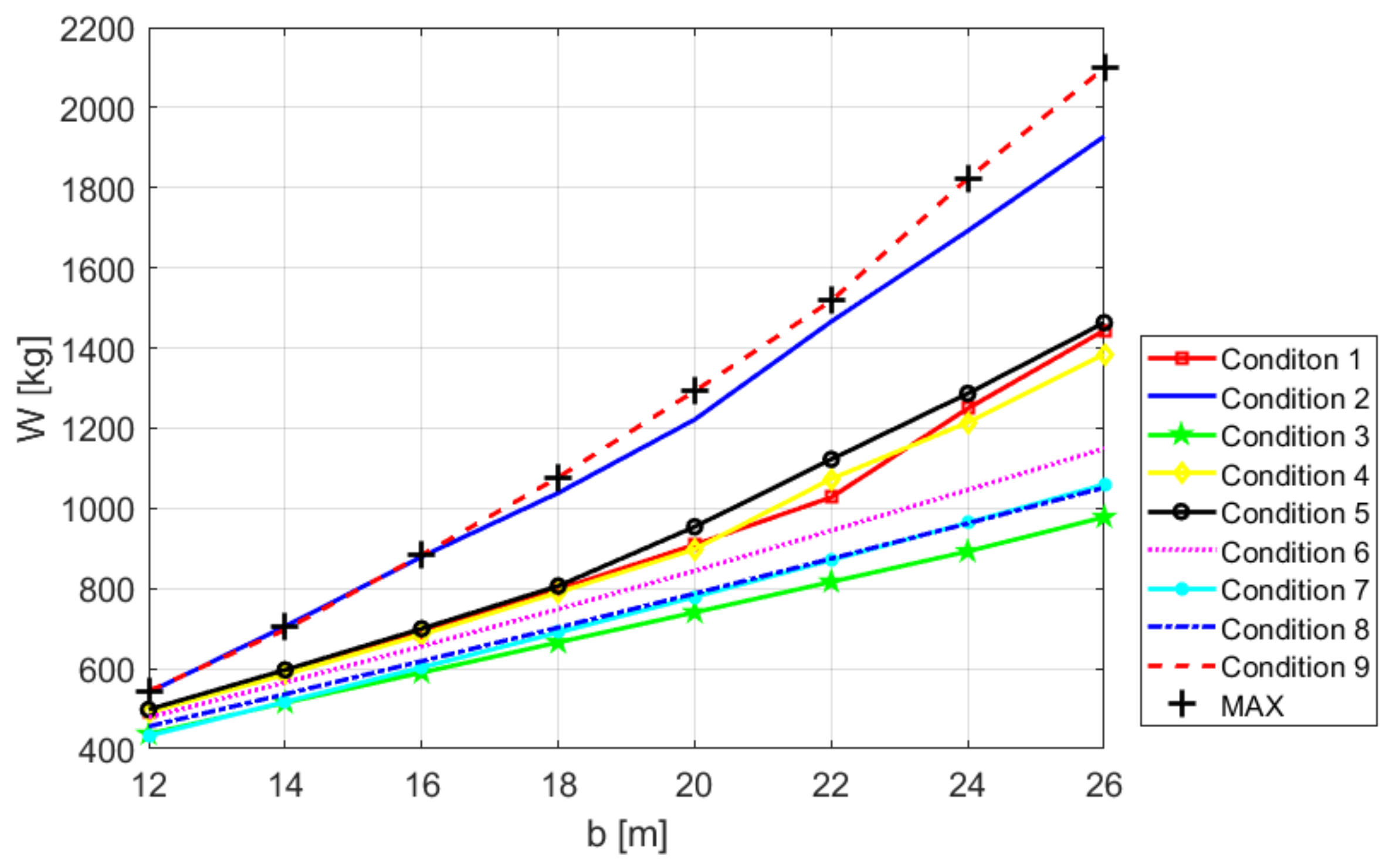
3.2. Unconventional Tail Design
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- ACARE (The Advisory Council for Aeronautics Research in Europe). Aeronautics and Air Transport beyond Vision 2020 (Towards 2050); Technical Report; European Commission: Brussels, Belgium, 2010. [Google Scholar]
- European Aviation Safety Agency. European Aviation Environmental Report; Technical Report; European Aviation Safety Agency: Cologne, Germany, 2019. [Google Scholar]
- Darecki, M.; Edelstenne, C.; Enders, T.; Fernandez, E.; Hartman, P.; Herteman, J.P.; Kerkloh, M.; King, I.; Ky, P.; Mathieu, M.; et al. Flightpath 2050 Europe’s Vision for Aviation. Report of the High Level Group on Aviation Research Policy; European Commission: Brussels, Belgium, 2011. [Google Scholar] [CrossRef]
- European Parliament, C.o.t.E.U. Directive 2008/101/EC of the European Parliament and of the Council of 19 November 2008 amending Directive 2003/87/EC so as to include aviation activities in the scheme for greenhouse gas emission allowance trading within the Community. Off. J. Eur. Union 2009, 52, 3–21, ISSN 1725-2555. [Google Scholar]
- Lee, D.; Pitari, G.; Grewe, V.; Gierens, K.; Penner, J.; Petzold, A.; Prather, M.; Schumann, U.; Bais, A.; Berntsen, T. Transport impacts on atmosphere and climate: Aviation. Atmos. Environ. 2010, 44, 4678–4734. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Macintosh, A.; Wallace, L. International aviation emissions to 2025: Can emissions be stabilised without restricting demand? Energy Policy 2009, 37, 264–273. [Google Scholar] [CrossRef] [PubMed]
- Wasiuk, D.K.; Khan, M.A.H.; Shallcross, D.E.; Lowenberg, M.H. A commercial aircraft fuel burn and emissions inventory for 2005–2011. Atmosphere 2016, 7, 78. [Google Scholar] [CrossRef] [Green Version]
- BOEING. Commercial Market Outlook 2020–2039; BOEING: Arlington, VA, USA, 2020. [Google Scholar]
- AIRBUS. Global Market Forecast. Cities, Airports and Aircraft 2019–2038; AIRBUS: CEDEX Blagnac, France, 2019. [Google Scholar]
- FAA. FAA Aerospace Forecasts Fiscal Years 2020–2040; Technical Report; Forecasts and Performance Analysis Division (APO-100), Federal Aviation Administration: Washington, DC, USA, 2020.
- Anderson, J. The Airplane: A History of Its Technology; AIAA: Reston, VI, USA, 2002. [Google Scholar]
- Martinez-Val, R.; Perez, E. Aeronautics and astronautics: Recent progress and future trends. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2009, 223, 2767–2820. [Google Scholar] [CrossRef]
- Tasca, A.L.; Cipolla, V.; Salem, K.A. Innovative Box-Wing Aircraft: Emissions and Climate Change. Sustainability 2021, 13, 3282. [Google Scholar] [CrossRef]
- Kroo, I. Nonplanar Wing Concepts for Increased Aircraft Efficiency. In Proceedings of the VKI lecture series of Innovative Configurations and Advanced Concepts for Future Civil Aircraft, Sint-Genesius-Rode, Belgium, 6–10 June 2005; pp. 1–29. [Google Scholar]
- Frota, J.; Nicholls, K.; Whurr, J.; Müller, M.; Gall, P.E.; Loerke, J.; Macgregor, K.; Schmollgruber, P.; Russell, J.; Hepperle, M.; et al. Final Activity Report. New Aircraft Concept Research (NACRE); Technical Report; SIXTH FRAMEWORK PROGRAMME PRIORITY 4. Aeronautics and Space. FP6-2003-AERO-1; NACRE Consortium: Blagnac, France, 2010. [Google Scholar]
- Torenbeek, E. Advanced Aircraft Design; John Wiley & Sons, Ltd.: Chichester, UK, 2013. [Google Scholar]
- Garcia-Benitez, J.; Cuerno-Rejado, C.; Gomez-Blanco, R. Conceptual design of a nonplanar wing airliner. Aircraft Eng. Aerospace Technol. 2016, 88, 561–571. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, Z.; Zhu, X.; Meng, P. Nonlinear static aeroelastic and trim analysis of Highly Flexible Joined-Wing aircraft. AIAA J. 2018, 56, 4988–4999. [Google Scholar] [CrossRef]
- Belardo, M.; Marano, A.D.; Beretta, J.; Diodati, G.; Graziano, M.; Capasso, M.; Ariola, P.; Orlando, S.; Di Caprio, F.; Paletta, N.; et al. Wing Structure of the Next-Generation Civil Tiltrotor: From Concept to Preliminary Design. Aerospace 2021, 8, 102. [Google Scholar] [CrossRef]
- SAE. Procedure for the Calculation of Aircraft Emissions; Technical Report AIR5715; SAE International: Warrendale, PA, USA, 2009. [Google Scholar]
- EASA. Introduction to the ICAO Engine Emissions Databank; Technical Report; EASA: Cologne, Germany, 2021. [Google Scholar]
- Eyers, C.; Norman, P.; Middel, J.; Plohr, M.; Michot, S.; Atkinson, K.; Christou, R. AERO2k Global Aviation Emissions Inventories for 2002 and 2025; Technical Report; QinetiQ Ltd.: Farnborough, UK, 2004. [Google Scholar]
- Anderson, J.D. Aircraft Performance and Design; WCB McGraw-Hill: Boston, MA, USA, 1999. [Google Scholar]
- Sanchez-Carmona, A.; Cuerno-Rejado, C. Vee-tail conceptual design criteria for commercial transport aeroplanes. Chin. J. Aeronaut. 2019, 32, 595–610. [Google Scholar] [CrossRef]
- Torenbeek, E. Synthesis of Subsonic Airplane Design; Delft University Press: Delft, The Netherlands; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1982. [Google Scholar]
- Roskam, J. Airplane Deisgn. Part V: Component Weight Estimation; DAR Corporation: Ottawa, KS, USA, 1999. [Google Scholar]
- Raymer, D.P. Aircraft Design: A Conceptual Approach, 1st ed.; American Institute of Aeronautics and Astronautics, Inc.: Washington, DC, USA, 1989. [Google Scholar]
- Sadraey, M.H. Aircraft Design. A Systems Engineering Approach, 1st ed.; John Wiley & Sons, Ltd.: Chichester, UK, 2013. [Google Scholar]
- Lucas, S.D.; Velazquez, A.; Vega, J.M. An Optimization Method for an Aircraft Rear-end Conceptual Design Based on Surrogate Models. In Proceedings of the World Congress of Engineering, London, UK, 6–8 July 2011; Volume 3, pp. 2610–2615. [Google Scholar]
- García-Hernández, L.; Cuerno-Rejado, C.; Pérez-Cortés, M. Dynamics and Failure Models for a V-Tail Remotely Piloted Aircraft System. J. Guid. Control Dyn. 2017, 41, 506–514. [Google Scholar] [CrossRef]
- Musa, N.A.; Mansor, S.; Ali, A.; Omar, W.Z.W. Importance of transient aerodynamic derivatives for V-tail aircraft flight dynamic design. In Proceedings of the 30th Congress of the International Council of the Aeronautical Sciences, ICAS 2016, Daejeon, Korea, 25–30 September 2016. [Google Scholar]
- Zhang, G.Q.; Yu, S.C.M.; Chien, A.; Xu, Y. Investigation of the Tail Dihedral Effects on the Aerodynamic Characteristics for the Low Speed Aircraft. Adv. Mech. Eng. 2013, 2013, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Risse, K.; Schäfer, K.; Schültke, F.; Stumpf, E. Central Reference Aircraft data System (CeRAS) for research community. CEAS Aeronaut. J. 2016, 7, 121–133. [Google Scholar] [CrossRef]
- Nicolai, L.M.; Carichner, G.E. Fundamentals of Aircraft and Airship Design. Volume I: Aircraft Design, AIAA educa ed.; American Institute of Aeronautics and Astronautics, Inc.: Blacksburg, VI, USA, 2010. [Google Scholar]
- Sanchez-Carmona, A.; Cuerno-Rejado, C.; Garcia-Hernandez, L. Unconventional Tail Configurations for Transport Aircraft. In Progress in Flight Physics Volume 9; Knight, D.D., Bondar, Y., Lipatov, I.I., Reijasse, P., Eds.; Torus Press: Moscow, Russia; EDP Sciences: Les Ulis, France, 2017; Chapter 1; pp. 127–148. [Google Scholar]
- Martinez-Val, R.; Roa, J.; Perez, E.; Cuerno, C. Effects of the mismatch between design capabilities and actual aircraft utilization. J. Aircraft 2011, 48, 1921–1927. [Google Scholar] [CrossRef]
- Martinez-Val, R.; Palacin, J.F.; Perez, E. The evolution of jet airliners explained through the range equation. Proc. Inst. Mech. Eng. Part G J. Aerospace Eng. 2008, 222, 915–919. [Google Scholar] [CrossRef]
- Melin, T. A Vortex Lattice MATLAB Implementation for Linear Aerodynamic Wing Applications. Master’s Thesis, Royal Institute of Technology (KTH), Stockholm, Sweden, 2000. [Google Scholar]
- Polhamus, E.C. Charts for Predicting the Subsonic Vortex-Lift Characteristics of Arrow, Delta, and Diamond Wings; Technical Report April, NASA TN D-6243; NASA: Washington, DC, USA, 1971.
- Certification Specifications and Acceptance Means of Compilance for Large Aeroplanes CS-25. arXiv 2019, arXiv:1011.1669v3. [CrossRef]
- Airworthiness Standard: Transport Category Airplanes. Title 14—Chapter I—Subchapter C—Part 25 Code of Federal Regulations. 2017. Available online: https://www.faa.gov/aircraft/air_cert/airworthiness_certification/std_awcert/std_awcert_regs/regs/ (accessed on 1 June 2021).
- Lomax, T.L. Structural Loads Analysis for Commercial Transport Aircraft: Theory and Practice; AIAA Education Series: Reston, VI, USA, 1996. [Google Scholar]
- Pratt, K. A Revised Formula for Caluclation of Gust Loads; Technical Report, NACA TN 2964; NASA: Washington, DC, USA, 1953.
- Pratt, K.; Walker, W. Revised Gust Load Formula and a Re-Evaluation of V-G Data Taken on Civil Transport Airplanes from 1933 to 1950; Technical Report, NACA Report 1206; NASA: Washington, DC, USA, 1953.
- Dababneh, O.; Kipouros, T. A review of aircraft wing mass estimation methods. Aerospace Sci. Technol. 2018, 72, 256–266. [Google Scholar] [CrossRef]
- Farrar, D. The design of compression structures for minimum weight. J. R. Aeronaut. Soc. 1949, 53, 1041–1052. [Google Scholar] [CrossRef]
- ICAO. ICAO Aircraft Engine Emissions Databank; ICAO: Montreal, QC, Canada, 2021. [Google Scholar]
- Schaefer, M.; Bartosch, S. Overview on Fuel Flow Correlation Methods for the Calculation of NOx, CO and HC Emissions and Their Implementation into Aircraft Performance Software; Technical Report; DLR: Cologne, Germany, 2013. [Google Scholar]
- Dubois, D.B.; Paynter, G.C.B. “Fuel Flow Method 2” for Estimating Aircraft Emissions. SAE Trans. 2006, 115, 1–14. [Google Scholar] [CrossRef]
- Jelinek, F.; Carlier, S.; Smith, J. The Advanced Emission Model (AEM3)—Validation Report—Version 1.5—Appendices A, B and C; Technical Report; Eurocontrol: Bretigny-sur-Orge, France, 2004. [Google Scholar]
- Papalambros, P. Monotonicity Analysis in Engineering Design Optimization. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1979. [Google Scholar]
- Papalambros, P.Y.; Wilde, D.J. Principles of Optimal Design: Modeling and Computation, 3rd ed.; Cambridge University Press: Cambridge, UK, 2017; p. 484. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value |
|---|---|
| Maximum take of weight | 77,000 kg |
| Operating empty weight | 42,100 kg |
| Number of passengers | 150 |
| Mach number | 0.78 |
| Wing area | 122.41 m2 |
| Horizontal tail area | 32.23 m2 |
| Vertical tail area | 28.21 m2 |
| Horizontal tail weight | 682 kg |
| Vertical tail weight | 522 kg |
| Parameter | kg |
|---|---|
| CO2 | 47,007.8 |
| H2O | 17,134.2 |
| SOx | 12.54 |
| HC | 1.438 |
| CO | 39.926 |
| NOx | 173.59 (BFFM2)/160.00 (DLR) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanchez-Carmona, A.; Cuerno-Rejado, C. Design Process and Environmental Impact of Unconventional Tail Airliners. Aerospace 2021, 8, 175. https://doi.org/10.3390/aerospace8070175
Sanchez-Carmona A, Cuerno-Rejado C. Design Process and Environmental Impact of Unconventional Tail Airliners. Aerospace. 2021; 8(7):175. https://doi.org/10.3390/aerospace8070175
Chicago/Turabian StyleSanchez-Carmona, Alejandro, and Cristina Cuerno-Rejado. 2021. "Design Process and Environmental Impact of Unconventional Tail Airliners" Aerospace 8, no. 7: 175. https://doi.org/10.3390/aerospace8070175