
Multi-Aircraft Trajectory Collaborative Prediction Based on Social Long Short-Term Memory Network



Abstract
:1. Introduction
2. Related Work
2.1. State Estimation Models
2.2. Kinetic Models
2.3. Machine Learning Models
2.4. Method Overview
- (a)
- In order to simultaneously predict the 4D trajectory of multiple aircraft at any time, it is necessary to encode the aircraft state sequence dynamically. On the one hand, each aircraft enters and exits the airspace at different time points. How to dynamically update the historical state information input to the model is problematic. On the other hand, inputting the state sequence of multiple aircraft as a whole will cause the input dimension to be too high. How to balance the model’s generalization ability and computational efficiency is another problem.
- (b)
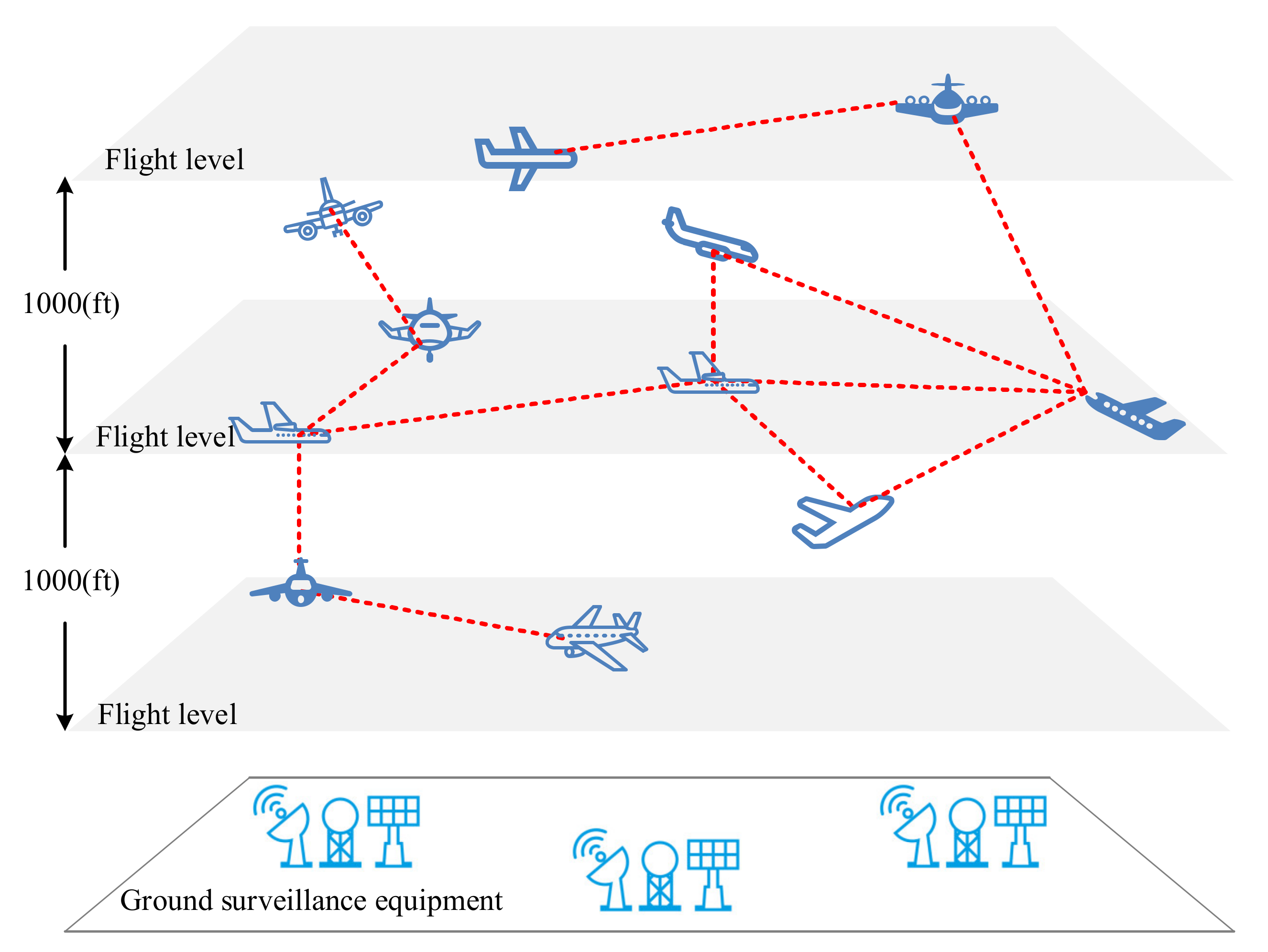
- How to reasonably consider the interaction between aircraft in the airspace is another significant difficulty in constructing a high-precision trajectory prediction model. Usually, during aircraft flight, the controller will perform conflict resolution based on the aircraft’s flight trend, specified minimum interval, and sector capacity to avoid collisions between aircraft or seek a balance between sector demand and capacity. For example, controllers sometimes designate aircraft to deviate from planned routes to relieve congestion in the airspace sector. This kind of trajectory deviation cannot be predicted by observing an aircraft alone, but other aircraft around which are most likely to affect it need to be considered.
3. Methods
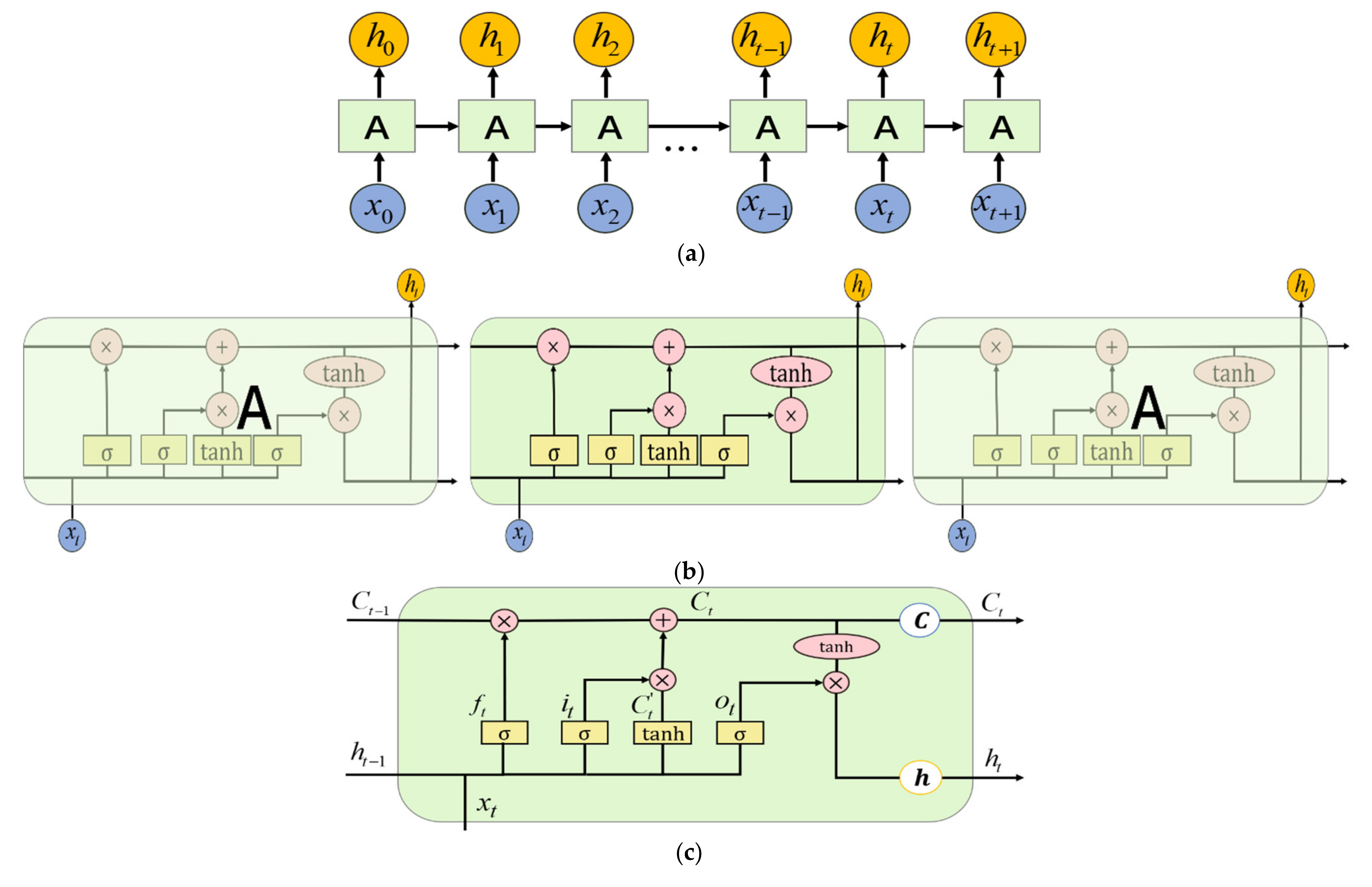
3.1. The Structure of LSTM
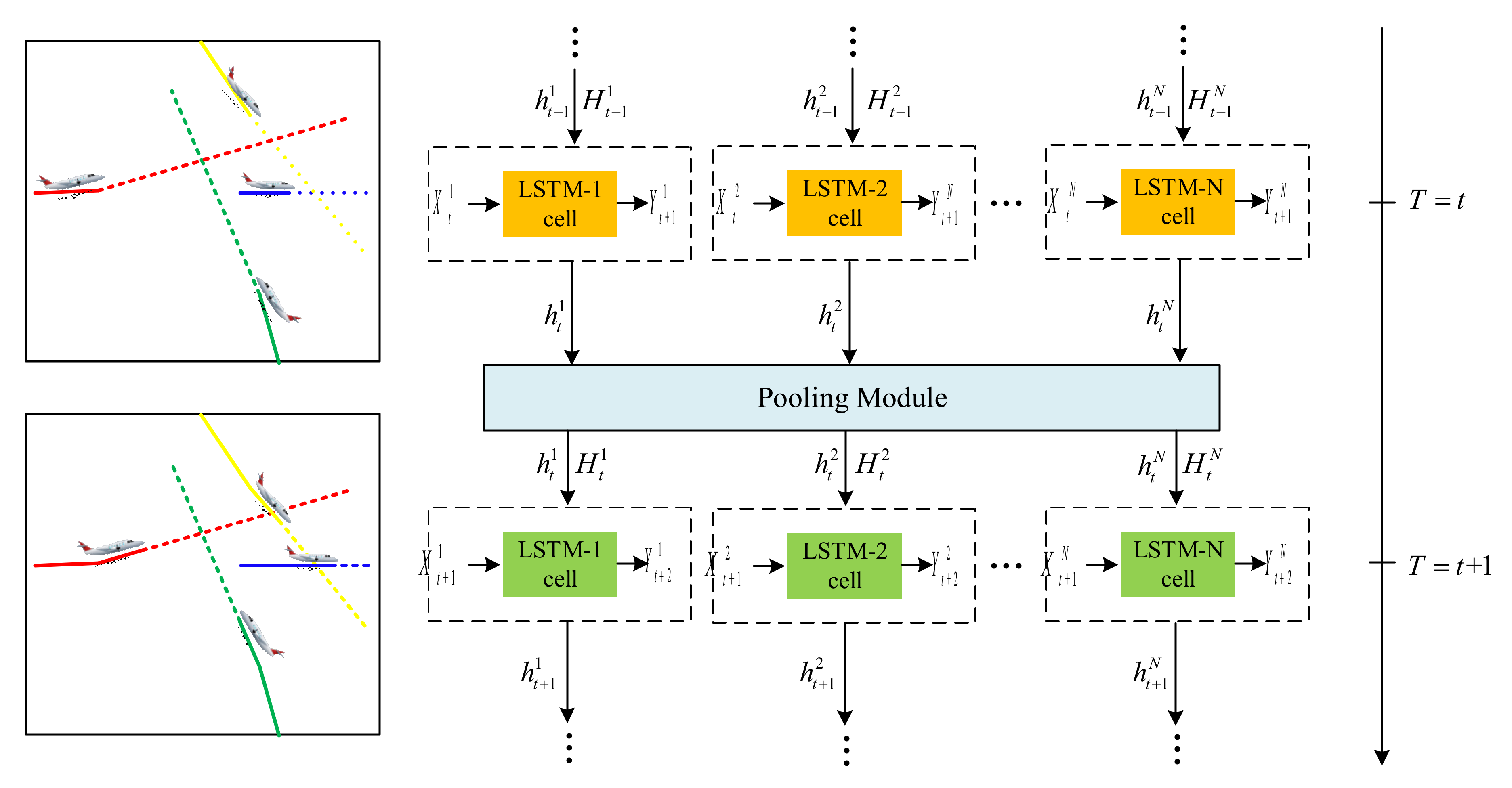
3.2. The Structure of Social LSTM
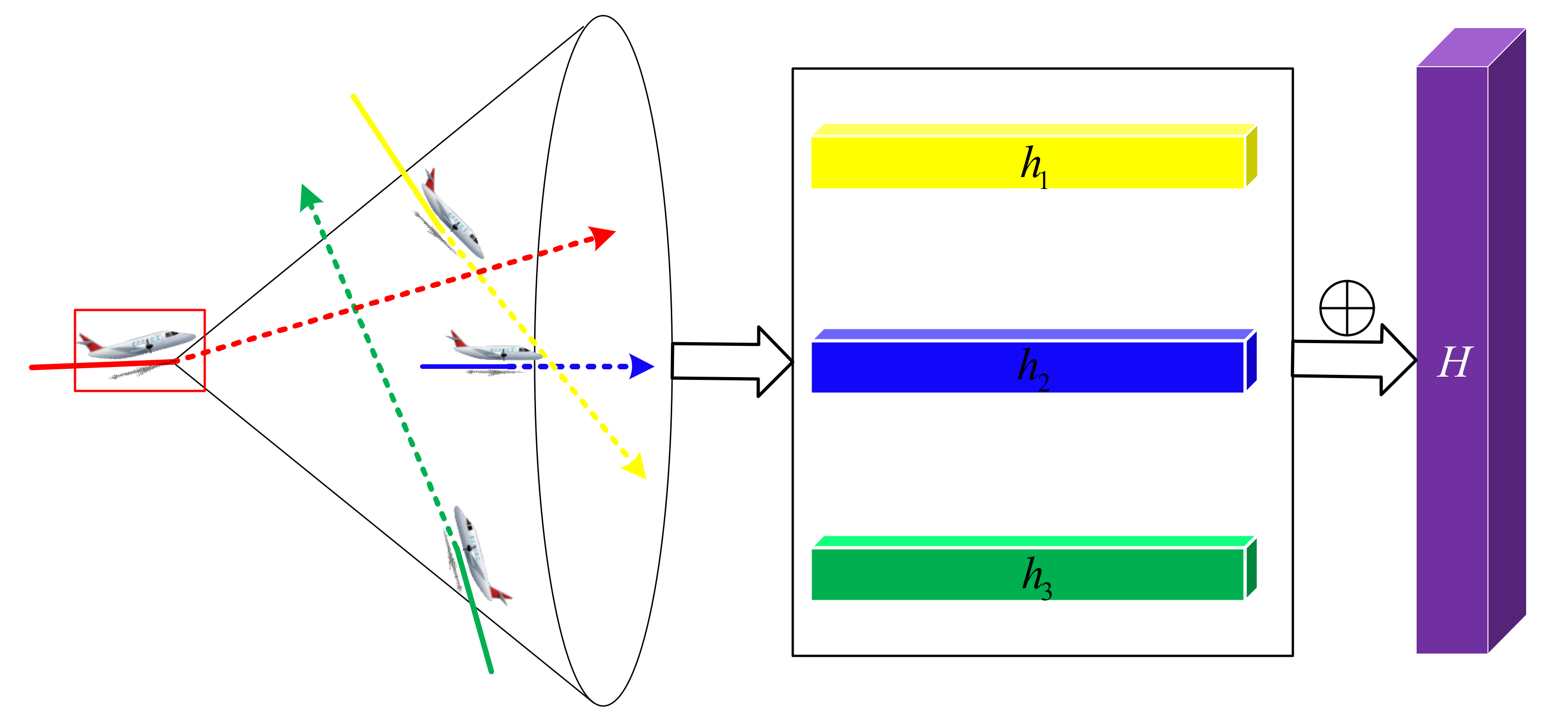
3.3. Pooling Layers
3.4. Trajectory Inference Process
4. Case Analysis
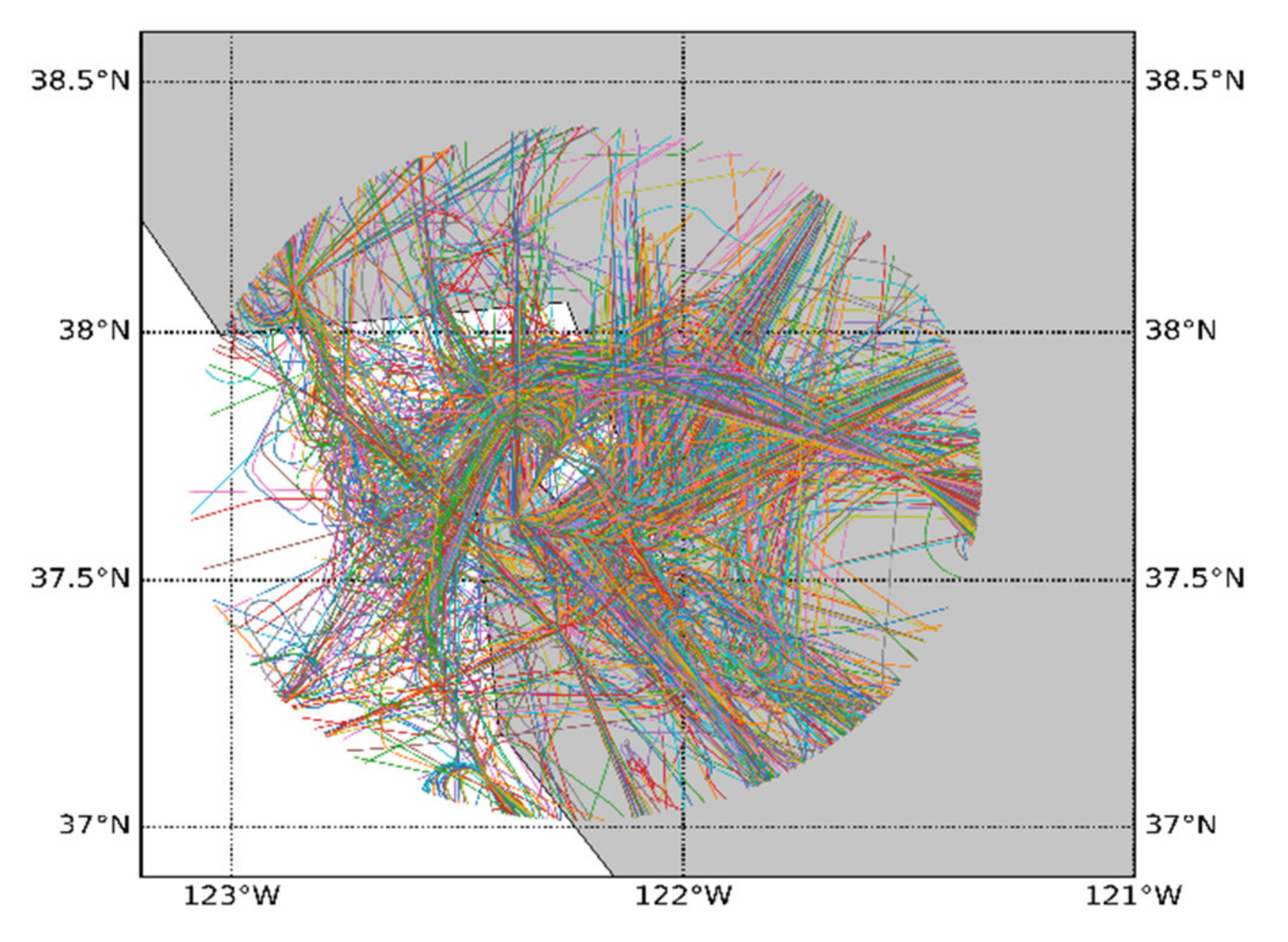
4.1. Data Processing
4.2. Evaluation Index
4.3. Parameter Setting
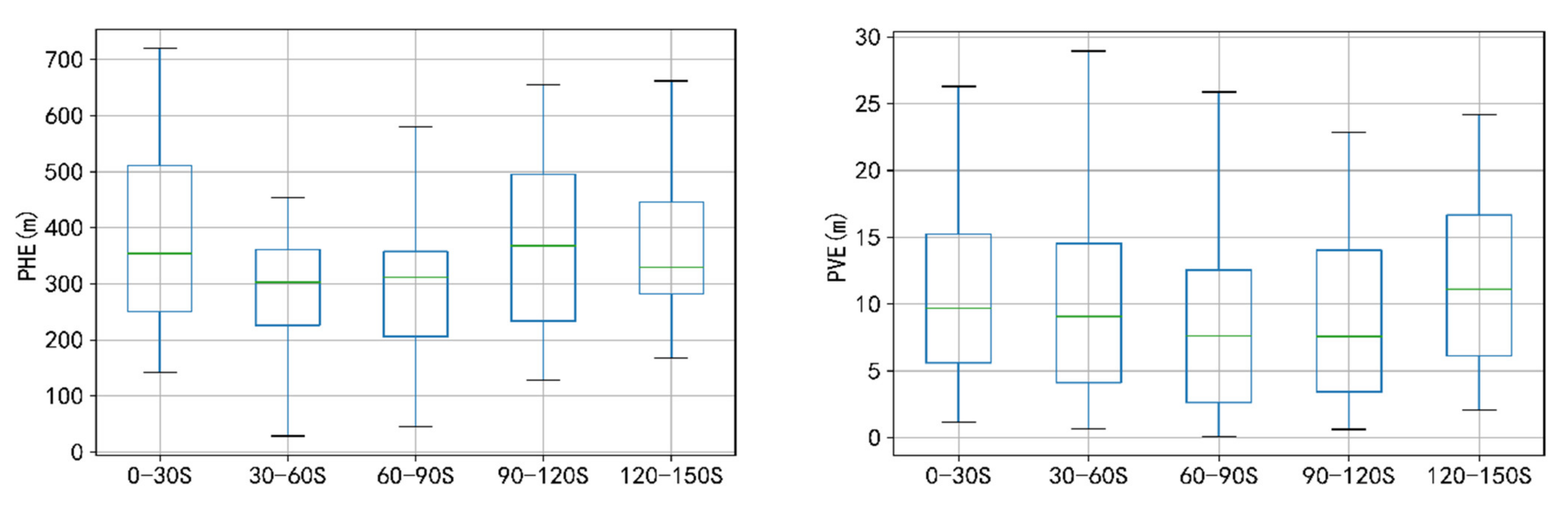
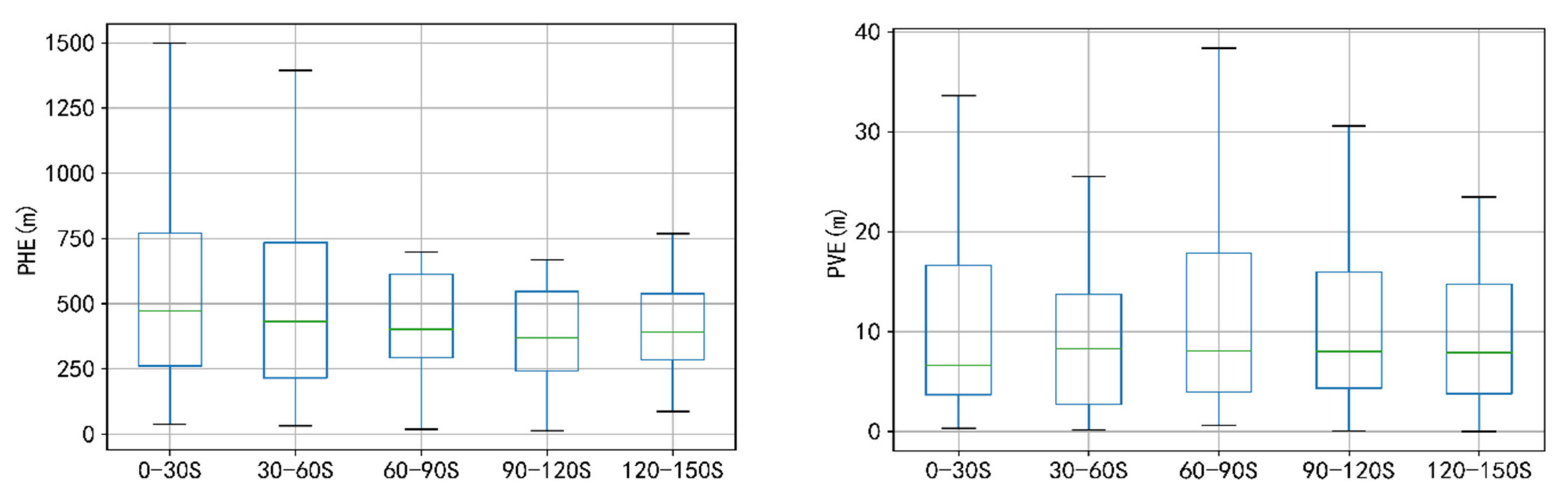
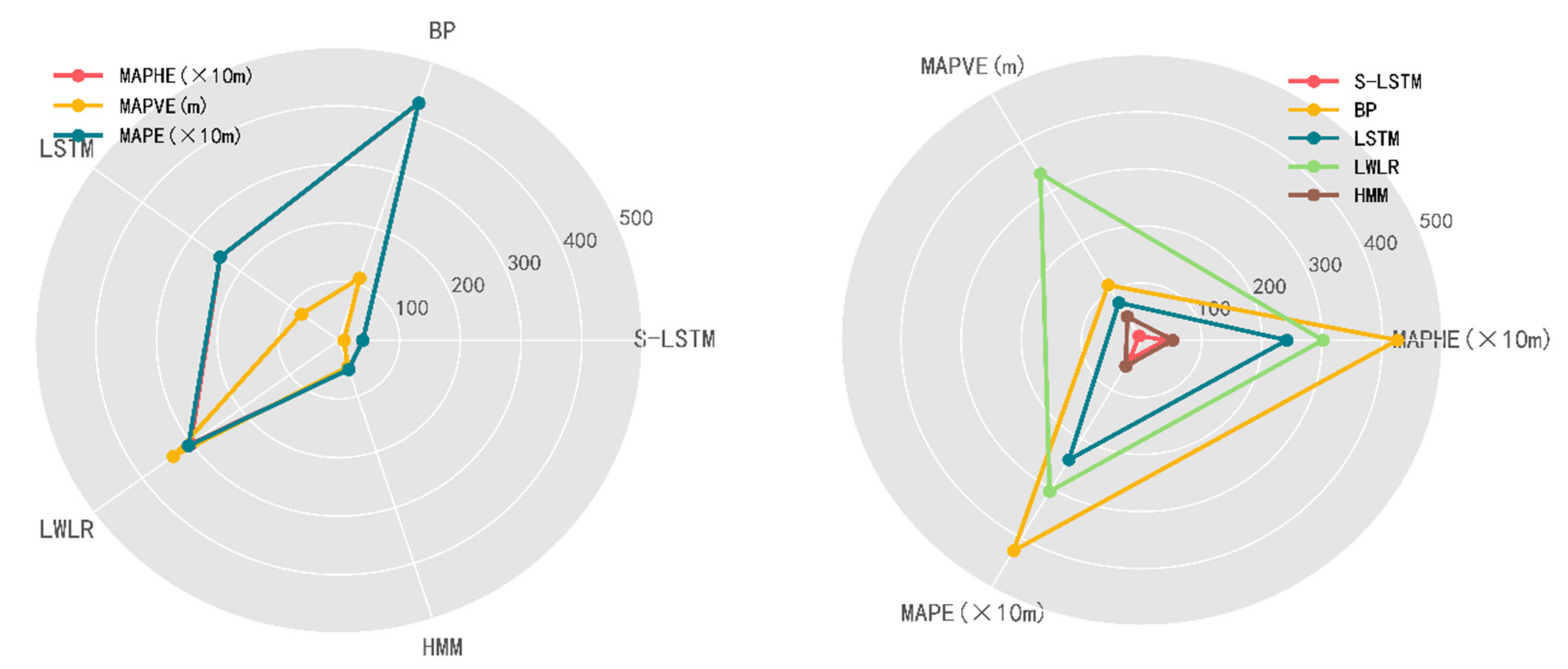
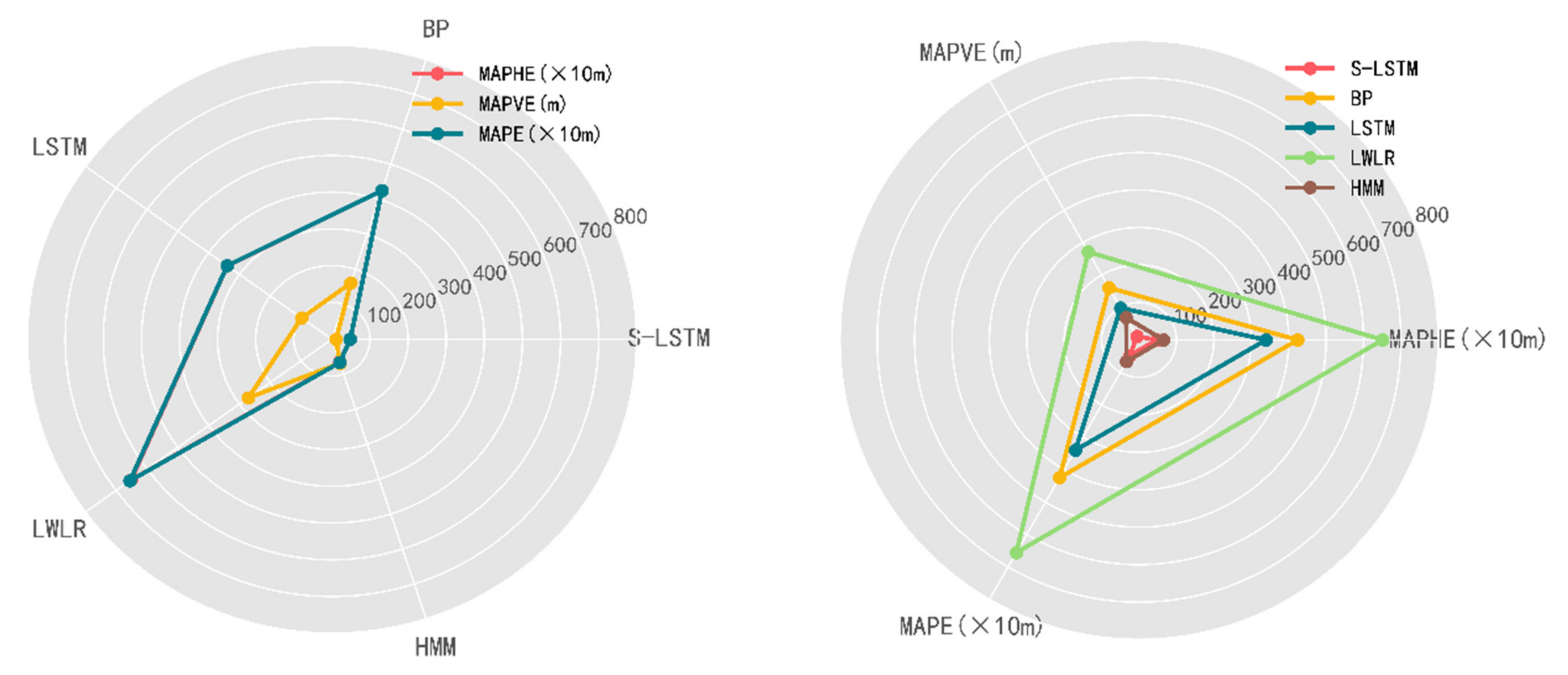
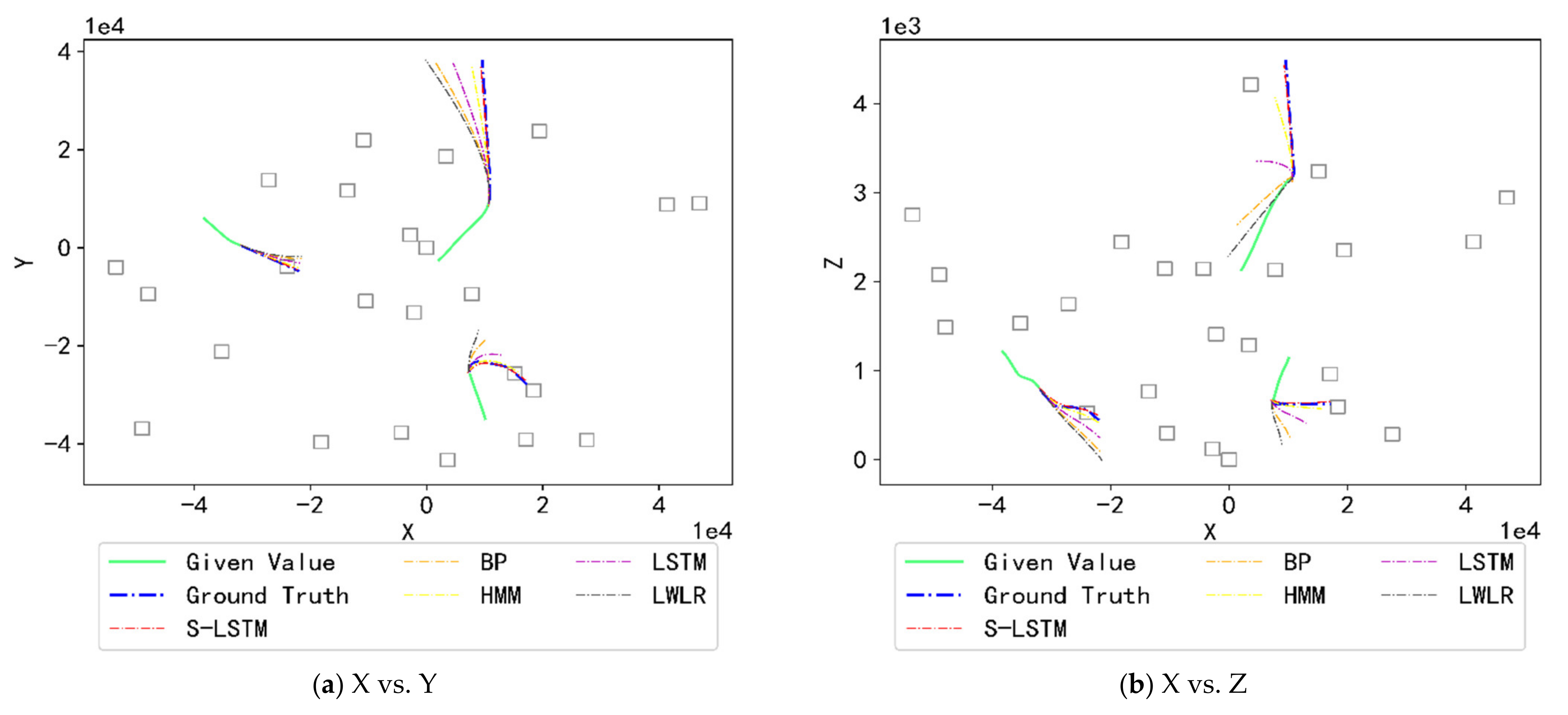
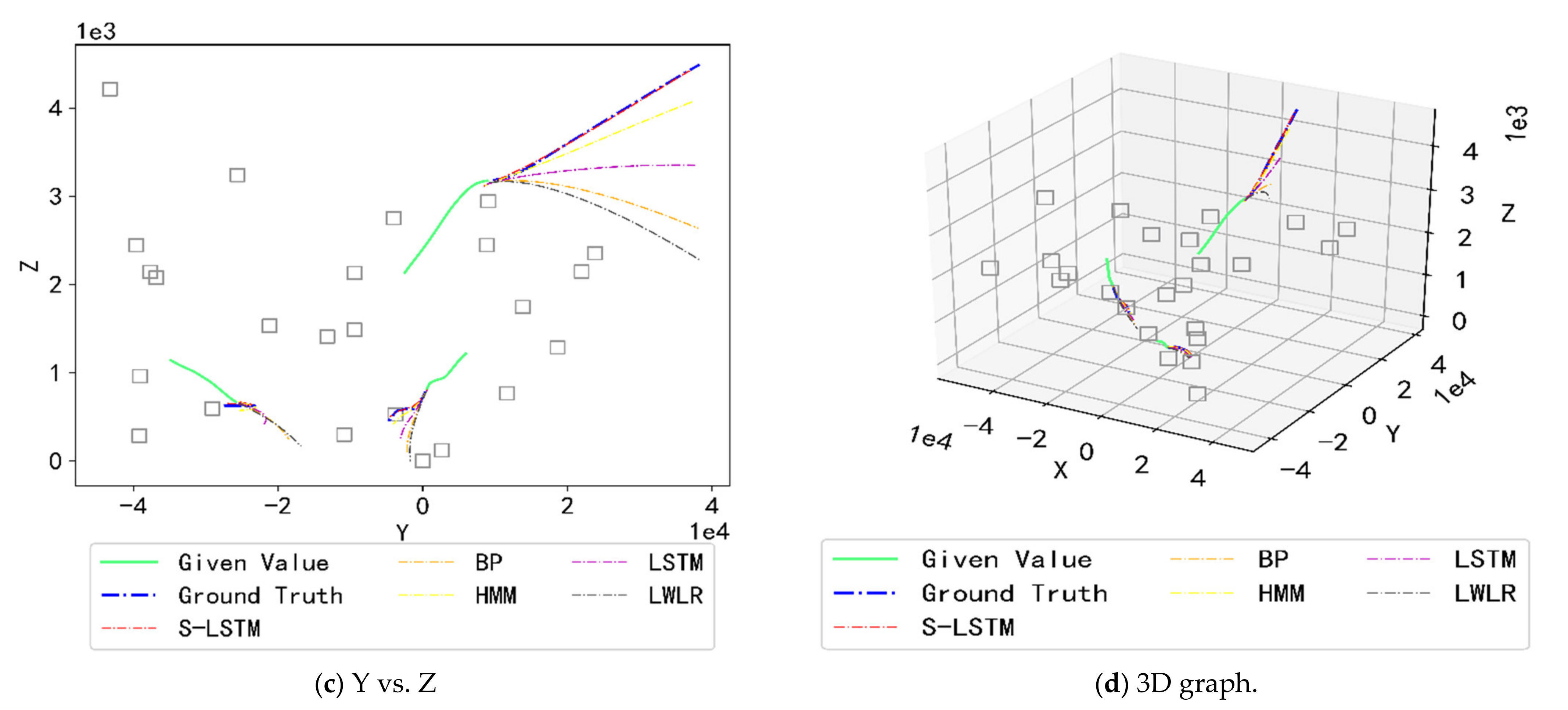
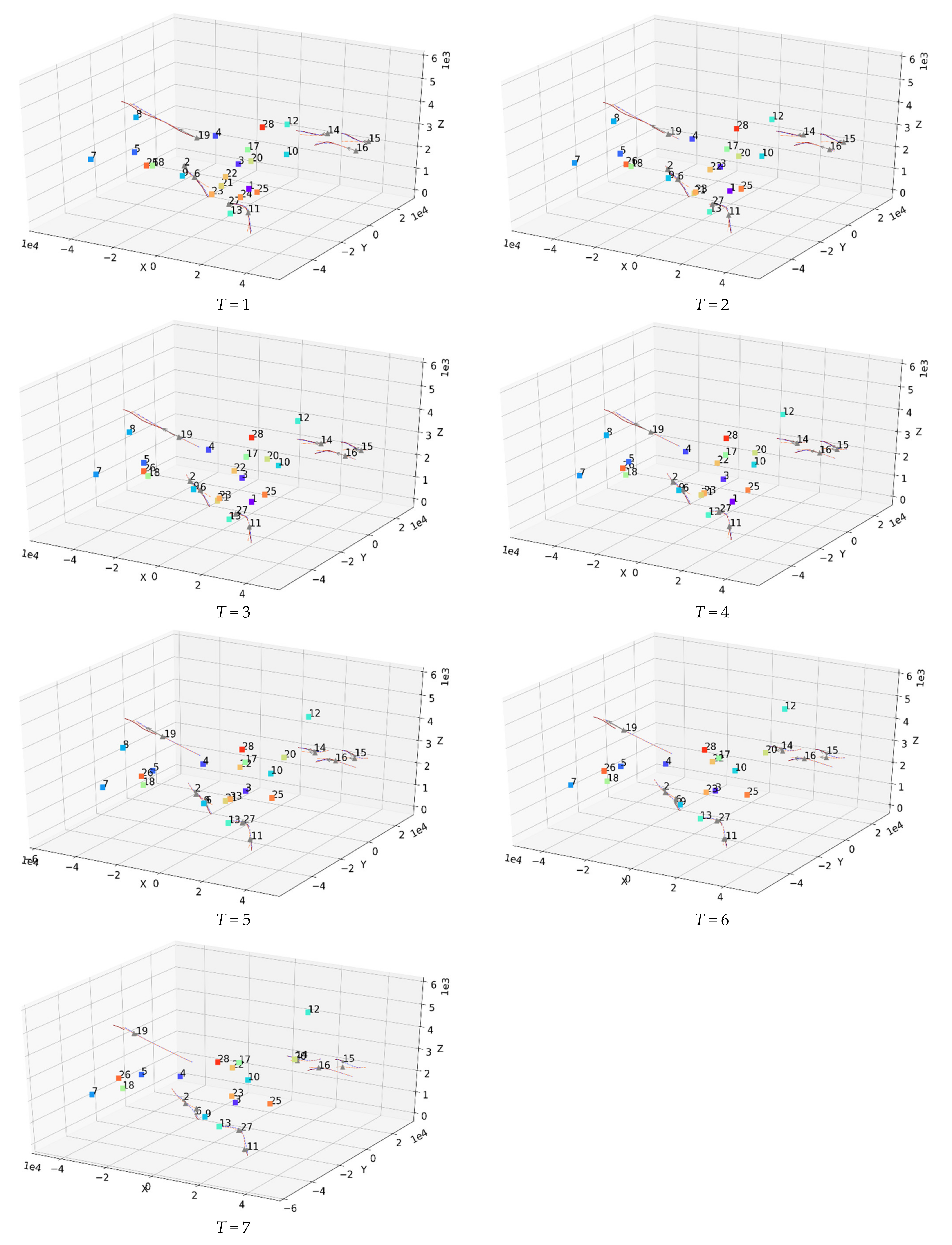
4.4. Model Performance Analysis
4.5. Discussion of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Joint Planning And Development Office. Concept of Operations for the Next Generation Air Transportation System; Joint Planning and Development Office: Washington, DC, USA, 2007. [Google Scholar]
- Undertaking, S.J. The European ATM Master Plan, Edition 2, October 2012. Available online: https://www.atmmasterplan.eu/download/25 (accessed on 30 October 2012).
- Li, X.; Peng, L.; Yao, X.; Cui, S.; Hu, Y.; You, C.; Chi, T. Long short-term memory neural network for air pollutant concentration predictions: Method development and evaluation. Environ. Pollut. 2017, 231, 997–1004. [Google Scholar] [CrossRef]
- Fischer, T.; Krauss, C. Deep learning with long short-term memory networks for financial market predictions. Eur. J. Oper. Res. 2018, 270, 654–669. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Sun, S.; Li, J.; Lin, X.; Tian, Y. Traffic flow prediction using LSTM with feature enhancement. Neurocomputing 2019, 332, 320–327. [Google Scholar] [CrossRef]
- Zeng, W.; Quan, Z.; Zhao, Z.; Xie, C.; Lu, X. A deep learning approach for aircraft trajectory prediction in terminal airspace. IEEE Access 2020, 8, 151250–151266. [Google Scholar] [CrossRef]
- Chatterji, G. Short-term trajectory prediction methods. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit, Portland, OR, USA, 9–11 August 1999; p. 4233. [Google Scholar]
- Avanzini, G. Frenet-based algorithm for trajectory prediction. J. Guid. Control. Dynam. 2004, 27, 127–135. [Google Scholar] [CrossRef]
- Lymperopoulos, I.; Lygeros, J. Sequential Monte Carlo methods for multi-aircraft trajectory prediction in air traffic management. Int. J. Adapt. Control Signal Process. 2010, 24, 830–849. [Google Scholar] [CrossRef]
- Choi, P.P.; Hebert, M. Learning and predicting moving object trajectory: A piecewise trajectory segment approach. Robot. Inst. 2006, 337, 1–17. [Google Scholar]
- Ayhan, S.; Samet, H. Aircraft trajectory prediction made easy with predictive analytics. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 14–19 August 2016; pp. 21–30. [Google Scholar]
- Lin, Y.; Zhang, J.-W.; Liu, H. An algorithm for trajectory prediction of flight plan based on relative motion between positions. Front. Inf. Technol. Electron. Eng. 2018, 19, 905–916. [Google Scholar] [CrossRef]
- Lin, Y.; Yang, B.; Zhang, J.; Liu, H. Approach for 4-d trajectory management based on HMM and trajectory similarity. J. Mar. Sci. Technol. 2019, 27, 246–256. [Google Scholar]
- Rezaie, R.; Li, X.R. Trajectory modeling and prediction with waypoint information using a conditionally Markov sequence. In Proceedings of the 2018 56th Annual Allerton Conference on Communication, Control, and Computing, Champaign, IL, USA, 2–5 October 2018; pp. 486–493. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Yepes, J.L.; Hwang, I.; Rotea, M. New algorithms for aircraft intent inference and trajectory prediction. J. Guid. Control Dynam. 2007, 30, 370–382. [Google Scholar] [CrossRef]
- Jun-feng, Z.; Xiao-guang, W.; Fei, W. Aircraft trajectory prediction based on modified interacting multiple model algorithm. J. Donghua Univ. 2015, 180–184. [Google Scholar]
- Xi, L.; Jun, Z.; Yanbo, Z.; Wei, L. Simulation study of algorithms for aircraft trajectory prediction based on ADS-B technology. In Proceedings of the 2008 Asia Simulation Conference-7th International Conference on System Simulation and Scientific Computing, Beijing, China, 10–12 October 2008; pp. 322–327. [Google Scholar]
- Liu, Y.; Li, X.R. Intent based trajectory prediction by multiple model prediction and smoothing. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 5–9 January 2015; p. 1324. [Google Scholar]
- Seah, C.E.; Hwang, I. A hybrid estimation algorithm for terminal-area aircraft tracking. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6691. [Google Scholar]
- Seah, C.E.; Hwang, I. Terminal-area aircraft tracking using hybrid estimation. J. Guid. Control Dynam. 2009, 32, 836–849. [Google Scholar] [CrossRef]
- Hwang, I.; Seah, C.E. Intent-based probabilistic conflict detection for the next generation air transportation system. In Proceedings of the IEEE, Beijing, China, 2–5 November 2008; Volume 96, pp. 2040–2059. [Google Scholar]
- Liu, W.; Hwang, I. Probabilistic trajectory prediction and conflict detection for air traffic control. J. Guid. Control Dynam. 2011, 34, 1779–1789. [Google Scholar] [CrossRef]
- Fukuda, Y.; Shirakawa, M.; Senoguchi, A. Development and evaluation of trajectory prediction model. In Proceedings of the Proceedings of the 27th International Congress of the Aeronautical Sciences, Nice, France, 19–24 September 2010. [Google Scholar]
- Schuster, W. Trajectory prediction for future air traffic management–complex manoeuvres and taxiing. Aeronaut. J. 2015, 119, 121–143. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Liu, J.; Hu, R.; Zhu, H. Online four dimensional trajectory prediction method based on aircraft intent updating. Aerosp. Sci. Technol. 2018, 77, 774–787. [Google Scholar] [CrossRef]
- Lymperopoulos, I.; Lygeros, J.; Lecchini, A. Model based aircraft trajectory prediction during takeoff. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 6098. [Google Scholar]
- Tang, X.-M.; Han, Y.-X. 4D trajectory estimation for air traffic control automation system based on hybrid system theory. PROMET-ZAGREB 2012, 24, 91–98. [Google Scholar] [CrossRef]
- Lee, J.; Lee, S.; Hwang, I. Hybrid System Modeling and Estimation for Arrival Time Prediction in Terminal Airspace. J. Guid. Control Dynam. 2016, 39, 903–910. [Google Scholar] [CrossRef]
- Félix, F.A.N.; Ruiz, M.A.V.; Querejeta, C.; Gallo, E.; Leonés, J.L. Predicting Aircraft Trajectory. Patent No. 9,020,662, 28 April 2015. [Google Scholar]
- Schuster, W.; Ochieng, W.; Porretta, M. High-performance trajectory prediction for civil aircraft. In Proceedings of the 29th Digital Avionics Systems Conference, Salt Lake City, UT, USA, 3–7 October 2010. [Google Scholar]
- Schuster, W.; Porretta, M.; Ochieng, W. High-accuracy four-dimensional trajectory prediction for civil aircraft. Aeronaut. J. 2012, 116, 45–66. [Google Scholar] [CrossRef] [Green Version]
- Porretta, M.; Dupuy, M.-D.; Schuster, W.; Majumdar, A.; Ochieng, W. Performance evaluation of a novel 4D trajectory prediction model for civil aircraft. J. Navig. 2008, 61, 393. [Google Scholar] [CrossRef]
- Thipphavong, D.P.; Schultz, C.A.; Lee, A.G.; Chan, S.H. Adaptive algorithm to improve trajectory prediction accuracy of climbing aircraft. J. Guid. Control Dynam. 2013, 36, 15–24. [Google Scholar] [CrossRef] [Green Version]
- Baklacioglu, T.; Cavcar, M. Aero-propulsive modelling for climb and descent trajectory prediction of transport aircraft using genetic algorithms. Aeronaut. J. 2014, 118, 65–79. [Google Scholar] [CrossRef]
- De Leege, A.; van Paassen, M.; Mulder, M. A machine learning approach to trajectory prediction. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4782. [Google Scholar]
- Hamed, M.G.; Gianazza, D.; Serrurier, M.; Durand, N. Statistical prediction of aircraft trajectory: Regression methods vs point-mass model. In Proceedings of the ATM Seminar, Chicago, IL, USA, 10–13 June 2013. [Google Scholar]
- Tastambekov, K.; Puechmorel, S.; Delahaye, D.; Rabut, C. Aircraft trajectory forecasting using local functional regression in Sobolev space. Transp. Res. Part C Emerg. Technol. 2014, 39, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Le Fablec, Y.; Alliot, J.-M. Using Neural Networks to Predict Aircraft Trajectories. In Proceedings of the IC-AI, Las Vegas, NV, USA, 28 June–1 July 1999; pp. 524–529. [Google Scholar]
- Shi, Z.; Xu, M.; Pan, Q.; Yan, B.; Zhang, H. LSTM-based flight trajectory prediction. In Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Fernando, T.; Denman, S.; McFadyen, A.; Sridharan, S.; Fookes, C. Tree memory networks for modelling long-term temporal dependencies. Neurocomputing 2018, 304, 64–81. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Yao, M.; Hong, T.; Li, B. Aircraft surface trajectory prediction method based on lstm with attenuated memory window. J. Phys. Conf. Ser. 2019, 1215, 012003. [Google Scholar] [CrossRef]
- Liu, Y.; Hansen, M.; Lovell, D.J.; Chuang, C.; Ball, M.O.; Gulding, J. Causal analysis of en route flight inefficiency-the US experience. In Proceedings of the Twelfth USA/Europe Air Traffic Management Research and Development Seminar, Seattle, WA, USA, 27–30 June 2017. [Google Scholar]
- Pang, Y.; Xu, N.; Liu, Y. Aircraft trajectory prediction using LSTM neural network with embedded convolutional layer. In Proceedings of the Annual Conference of the PHM Society, Scottsdale, AZ, USA, 21–26 September 2019. [Google Scholar]
- Wu, Z.-J.; Tian, S.; Ma, L. A 4D trajectory prediction model based on the BP neural network. J. Intell. Syst. 2019, 29, 1545–1557. [Google Scholar] [CrossRef]
- Han, P.; Yue, J.; Fang, C.; Shi, Q.; Yang, J. Short-term 4D trajectory prediction based on LSTM neural network. In Proceedings of the Second Target Recognition and Artificial Intelligence Summit Forum, Shenyang, China, 28–30 August 2020; p. 114270M. [Google Scholar]
- Zhang, X.; Mahadevan, S. Bayesian neural networks for flight trajectory prediction and safety assessment. Decis. Support. Syst. 2020, 131, 113246. [Google Scholar] [CrossRef]
- Pang, Y.; Liu, Y. Probabilistic aircraft trajectory prediction considering weather uncertainties using dropout as bayesian approximate variational inference. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1413. [Google Scholar]
- Pang, Y.; Liu, Y. Conditional Generative Adversarial Networks (CGAN) for Aircraft Trajectory Prediction considering weather effects. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1853. [Google Scholar]
- Wang, Z.; Liang, M.; Delahaye, D. Short-term 4d trajectory prediction using machine learning methods. In Proceedings of the SESAR Innovation Days, Belgrade, Serbia, 28–30 November 2017; pp. 1–10. [Google Scholar]
- Wang, Z.; Liang, M.; Delahaye, D. A hybrid machine learning model for short-term estimated time of arrival prediction in terminal manoeuvring area. Transp. Res. Part C Emerg. Technol. 2018, 95, 280–294. [Google Scholar] [CrossRef]
- Georgiou, H.; Pelekis, N.; Sideridis, S.; Scarlatti, D.; Theodoridis, Y. Semantic-aware aircraft trajectory prediction using flight plans. Int. J. Data Sci. Anal. 2020, 9, 215–228. [Google Scholar] [CrossRef]
- Hamed, M.G. Méthodes Non-Paramétriques Pour la Prévision D’intervalles Avec Haut Niveau de Confiance: Application à la Prévision de Trajectoires D’avions. Ph.D. Thesis, Institut National Polytechnique de Toulouse-INPT, Toulouse, France, 2014. [Google Scholar]
- Shen, Z.; Tang, X. A Novel 4D track prediction approach combining empirical mode decomposition with nonlinear correlation coefficient. In Proceedings of the 15th COTA International Conference of Transportation Professionals, Beijing, China, 24–27 July 2015; pp. 25–34. [Google Scholar]
- Gallego, C.E.V.; Comendador, V.F.G.; Carmona, M.A.A.; Valdés, R.M.A.; Nieto, F.J.S.; Martínez, M.G. A machine learning approach to air traffic interdependency modelling and its application to trajectory prediction. Transp. Res. Part C Emerg. Technol. 2019, 107, 356–386. [Google Scholar] [CrossRef]
- Tang, X.; Chen, P.; Zhang, Y. 4D trajectory estimation based on nominal flight profile extraction and airway meteorological forecast revision. Aerosp. Sci. Technol. 2015, 45, 387–397. [Google Scholar] [CrossRef]
- Fernández, E.C.; Cordero, J.M.; Vouros, G.; Pelekis, N.; Kravaris, T.; Georgiou, H.; Fuchs, G.; Andrienko, N.; Andrienko, G.; Casado, E. DART: A machine-learning approach to trajectory prediction and demand-capacity balancing. In Proceedings of the SESAR Innovation Days, Belgrade, Serbia, 28–30 November 2017; pp. 28–30. [Google Scholar]
- Barratt, S.T.; Kochenderfer, M.J.; Boyd, S.P. Learning probabilistic trajectory models of aircraft in terminal airspace from position data. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3536–3545. [Google Scholar] [CrossRef]
- Le, T.-H.; Tran, P.N.; Pham, D.-T.; Schultz, M.; Alam, S. Short-Term trajectory prediction using generative machine learning methods. In Proceedings of the ICRAT 2020 Conference, Tampa, FL, USA, 15 September 2020. [Google Scholar]
- Alahi, A.; Goel, K.; Ramanathan, V.; Robicquet, A.; Fei-Fei, L.; Savarese, S. Social lstm: Human trajectory prediction in crowded spaces. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 961–971. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Olah, C. Understanding Lstm Networks. 2015. Available online: http://colah.github.io/posts/2015-08-Understanding-LSTMs (accessed on 12 April 2021).
- Liu, Y.; Hansen, M.J. Predicting aircraft trajectories: A deep generative convolutional recurrent neural networks approach. arXiv 2018, arXiv:1812.11670. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 23 | |
| 123 | |
| 21 | |
| 29 | |
| 90 | |
| 4,000,800 | |
| 2 |
| Aircraft Number | MAPHE (m) | MAPVE (m) | MAPE (m) | |||
|---|---|---|---|---|---|---|
| S-LSTM | LSTM | S-LSTM | LSTM | S-LSTM | LSTM | |
| 2 | 435.52 | 765.67 | 28.41 | 131.66 | 436.44 | 776.90 |
| 6 | 481.51 | 581.63 | 45.55 | 204.44 | 483.66 | 616.52 |
| 11 | 548.52 | 892.38 | 49.02 | 47.17 | 550.71 | 893.63 |
| 14 | 544.52 | 868.61 | 15.57 | 109.92 | 544.75 | 875.54 |
| 15 | 414.20 | 688.75 | 18.33 | 144.01 | 414.61 | 703.64 |
| 16 | 343.39 | 500.51 | 38.25 | 76.61 | 345.52 | 506.34 |
| 27 | 303.30 | 600.91 | 21.27 | 37.86 | 304.05 | 602.10 |
| Input | Output | MAPHE (m) | MAPVE (m) | MAPE (m) |
|---|---|---|---|---|
| arrival | arrival | 690.24 | 15.42 | 690.58 |
| departure | departure | 762.39 | 22.93 | 762.96 |
| all | all | 660.05 | 13.07 | 660.17 |
| all | arrival | 651.97 | 11.19 | 652.44 |
| all | departure | 675.31 | 16.46 | 675.51 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Zeng, W.; Chu, X.; Cao, P. Multi-Aircraft Trajectory Collaborative Prediction Based on Social Long Short-Term Memory Network. Aerospace 2021, 8, 115. https://doi.org/10.3390/aerospace8040115
Xu Z, Zeng W, Chu X, Cao P. Multi-Aircraft Trajectory Collaborative Prediction Based on Social Long Short-Term Memory Network. Aerospace. 2021; 8(4):115. https://doi.org/10.3390/aerospace8040115
Chicago/Turabian StyleXu, Zhengfeng, Weili Zeng, Xiao Chu, and Puwen Cao. 2021. "Multi-Aircraft Trajectory Collaborative Prediction Based on Social Long Short-Term Memory Network" Aerospace 8, no. 4: 115. https://doi.org/10.3390/aerospace8040115