
Fuel Planning Strategies Considering Operational Uncertainties of Aerodynamic Formation Flight



Abstract
:1. Introduction
2. Adaptation of Decision Point Procedure to AWSE
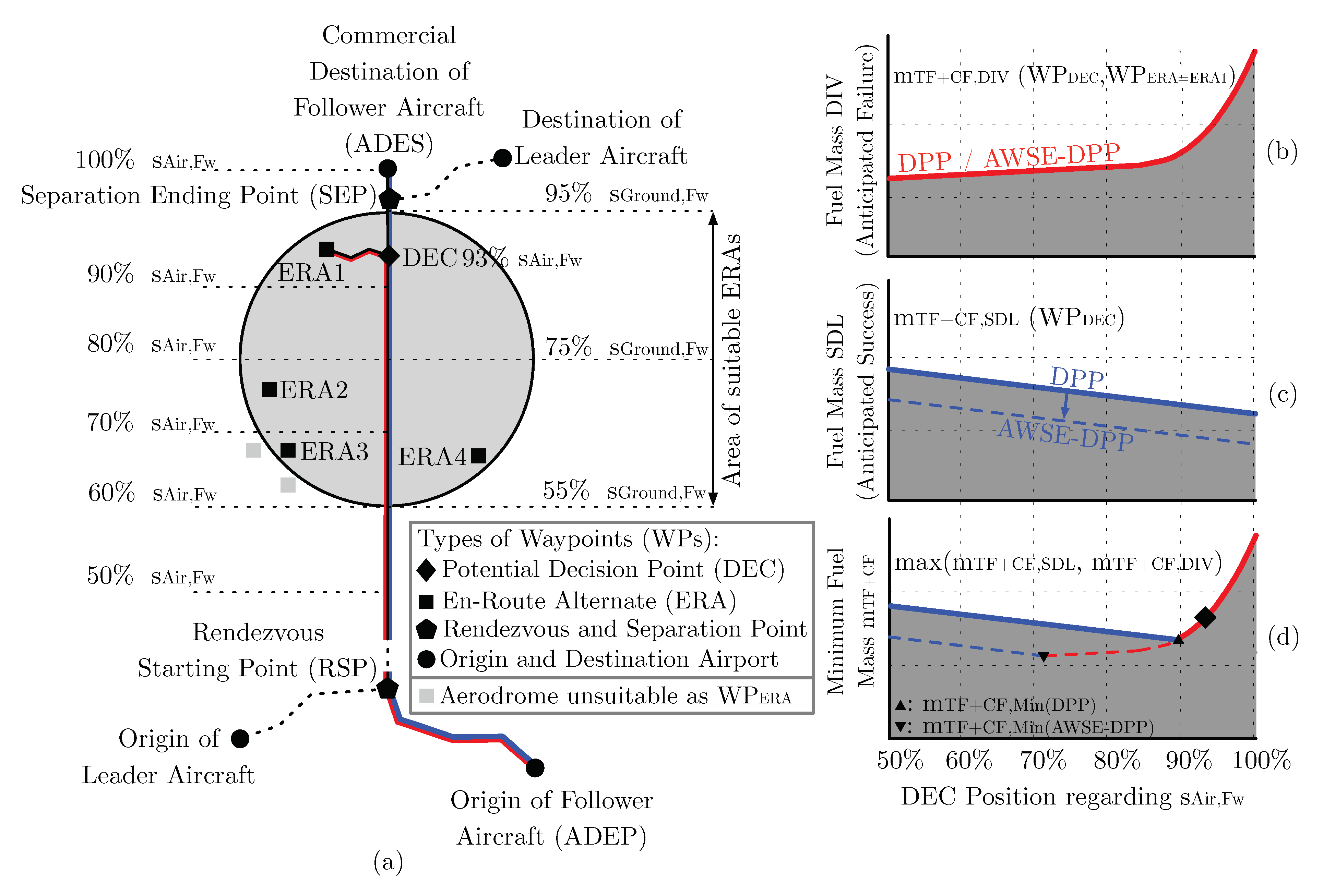
2.1. The Principle of DPP
2.2. Minimum Required Fuel with DPP
2.3. Application of Adapted AWSE-DPP
3. Optimized Flight Planning with AWSE-DPP
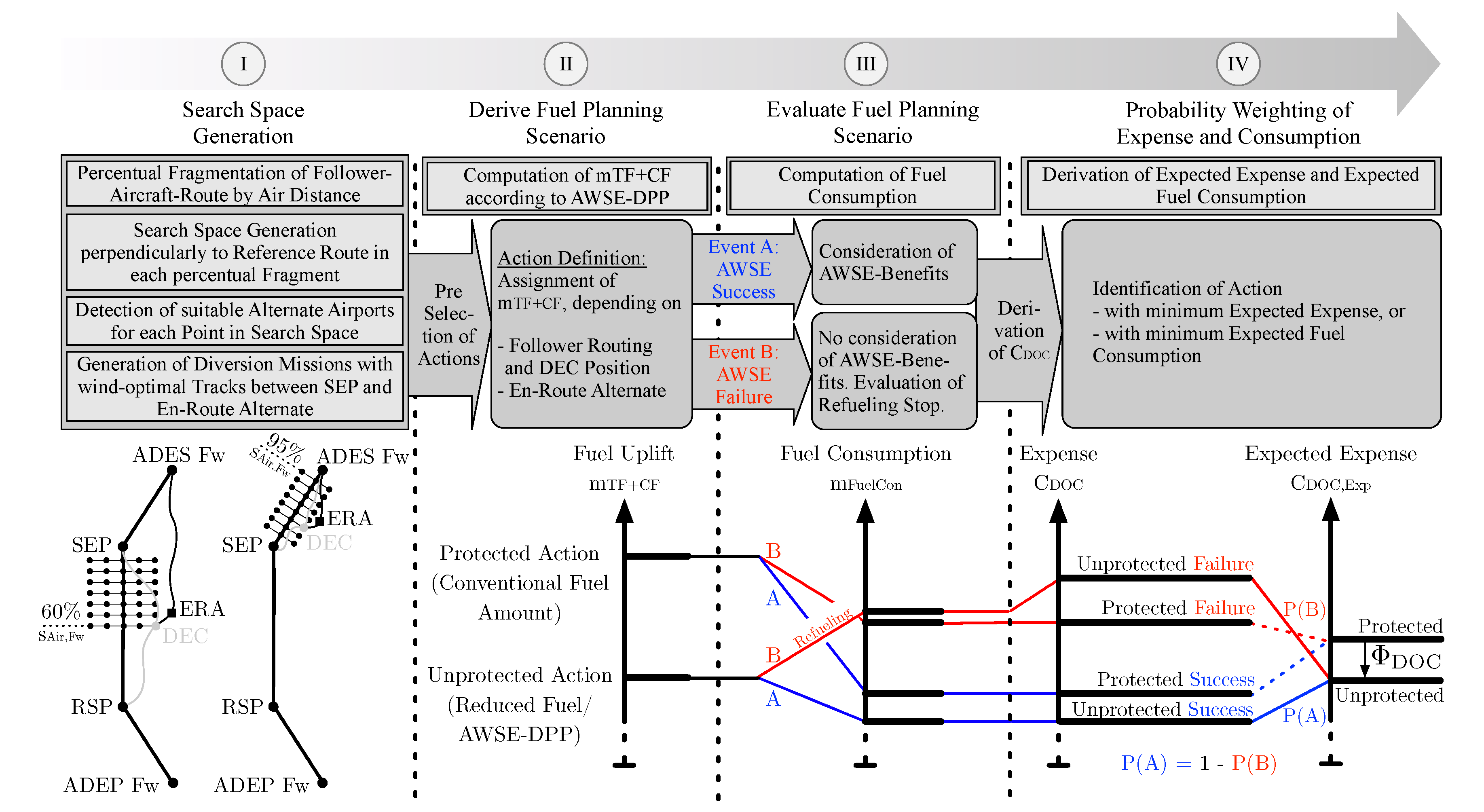
3.1. Search Space Generation
3.2. Derivation and Evaluation of Fuel Planning Scenarios
3.3. Selection of Fuel Planning Scenarios
4. Assumptions, Data Input, and Scope of Investigation
5. Results and Discussion
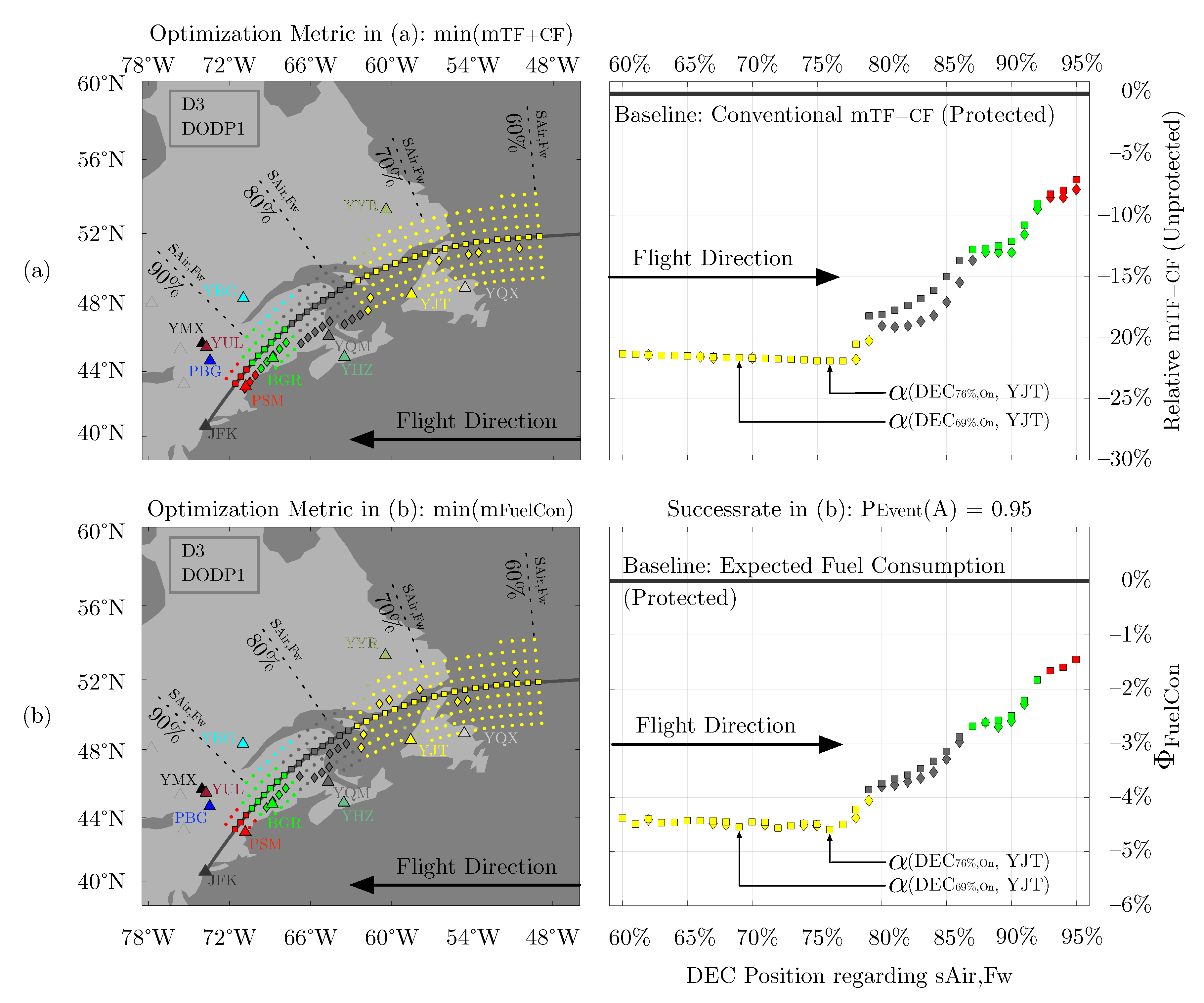
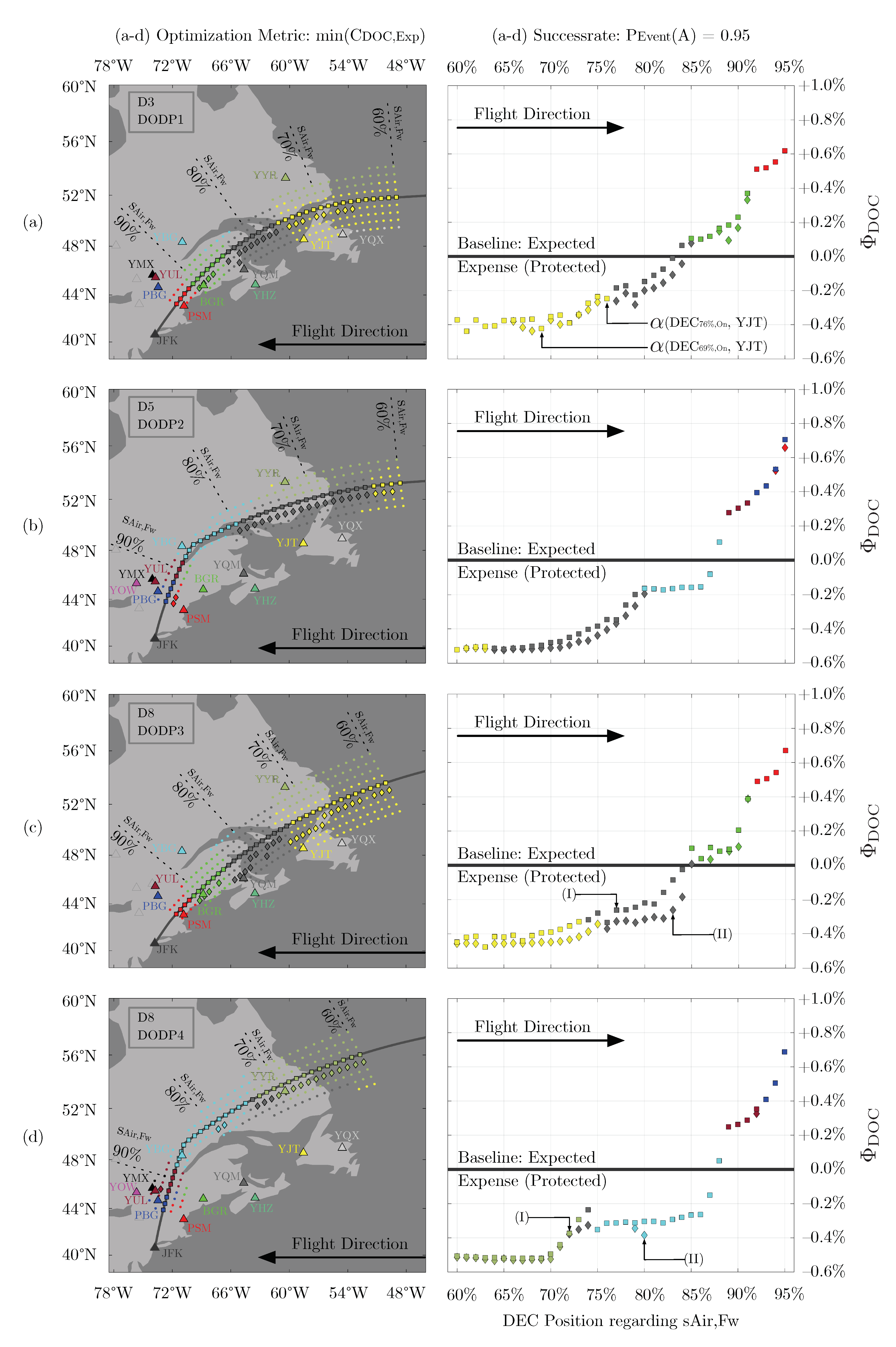
5.1. Selection and Evaluation of Optimal Actions
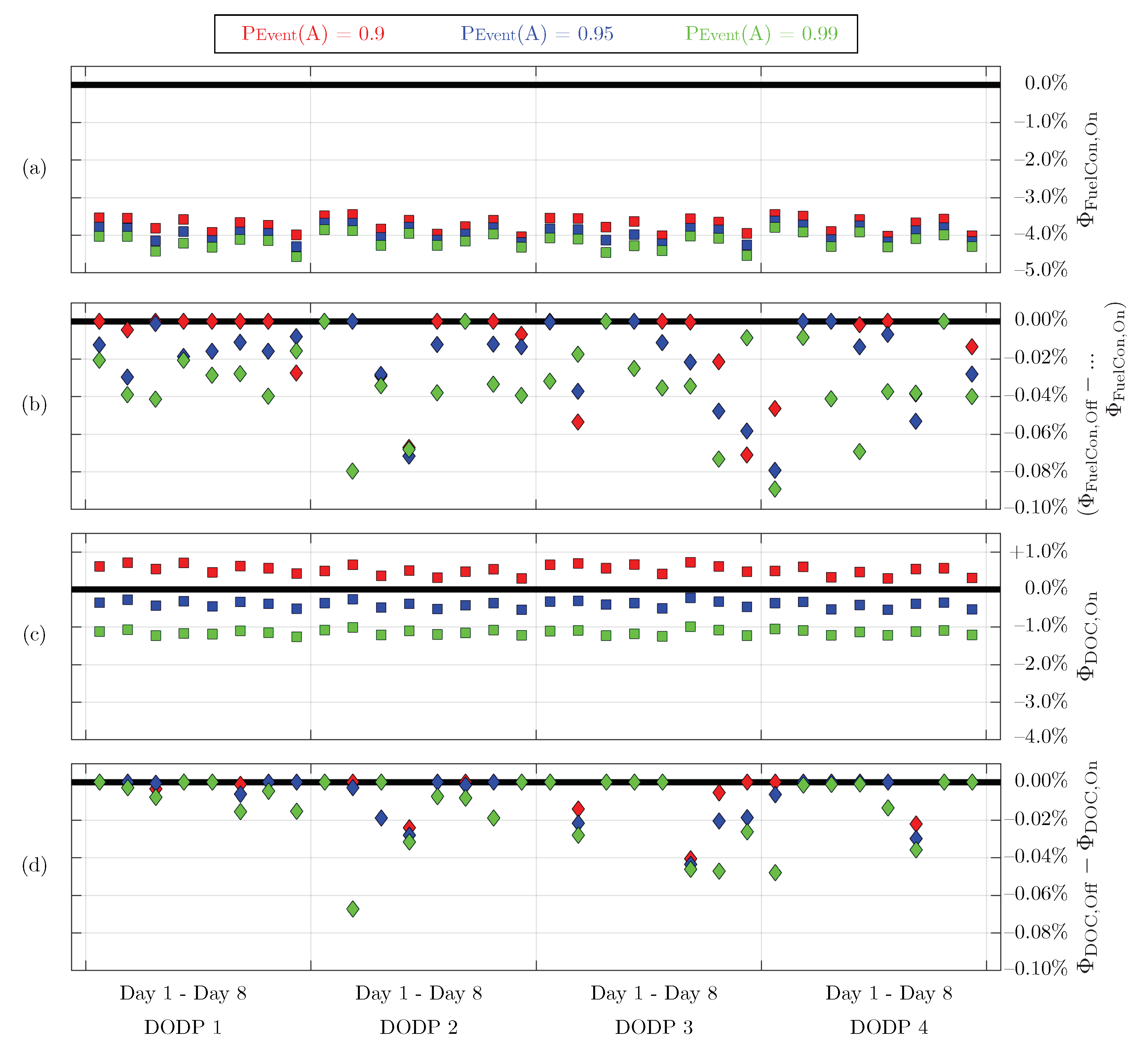
5.2. Quantification of Savings Potential
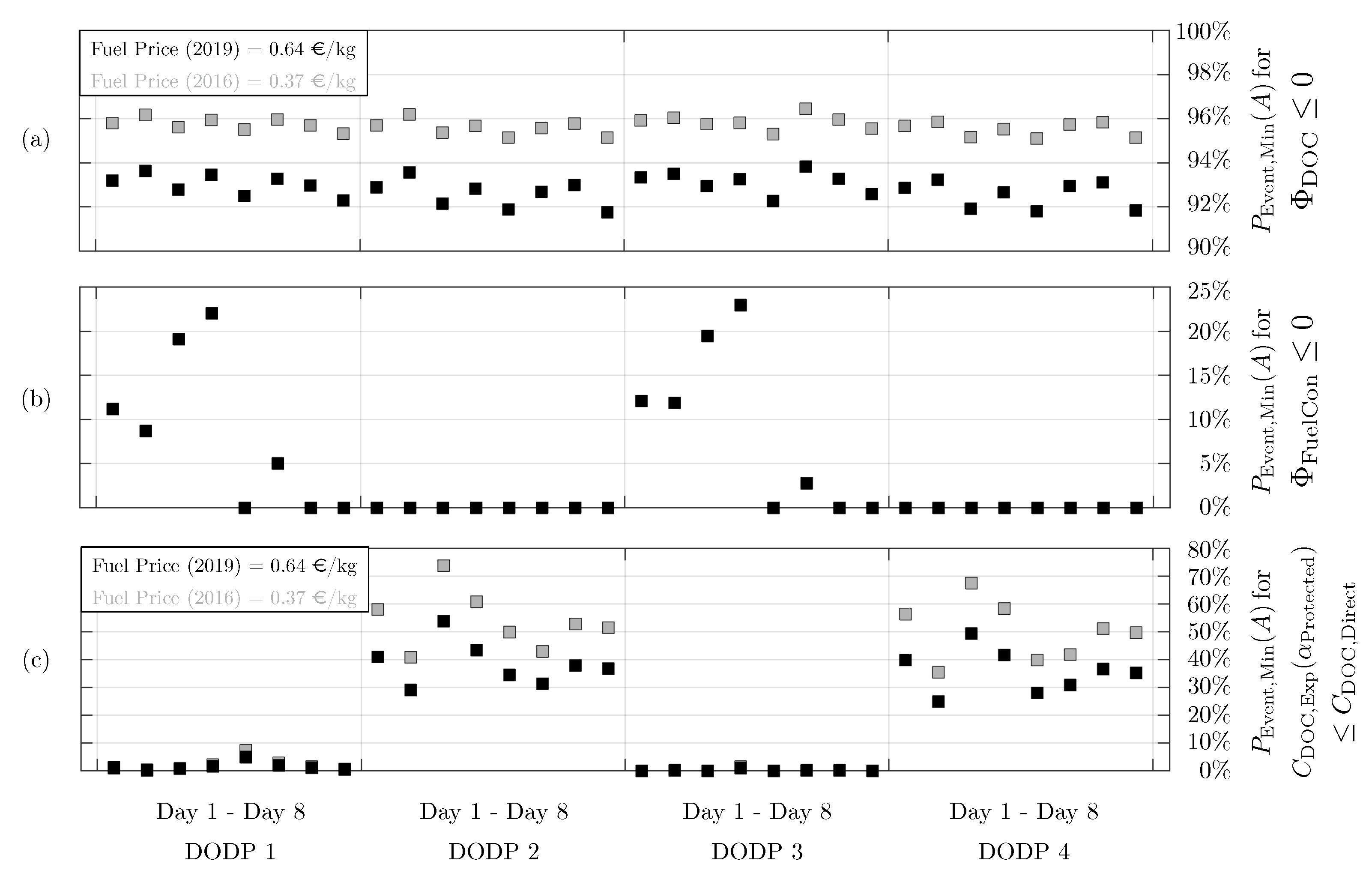
5.3. Minimum Required Success Probability
6. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADEP | Departure Airport |
| ADES | Destination Airport |
| AWSE | Aircraft Wake-Surfing for Efficiency |
| CF | Contingency Fuel |
| DEC | Decision Point |
| DIV | Diversion |
| DOC | Direct Operating Cost |
| DODP | Double-Origin-Destination-Pair |
| DPP | Decision Point Procedure |
| ECMWF | European Center for Medium-Range Weather Forecasts |
| ERA | En-Route Alternate Airport |
| FFF | Fuel-for-Fuel |
| FW | Follower Aircraft |
| RSP | Rendezvous Starting Point |
| SDL | Schedule |
| SEP | Separation Ending Point |
| TCM | Trajectory Calculation Module |
| TF | Trip Fuel |
| WP | Waypoint |
Appendix A. Atmosphere Days

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Atmosphere Day (Y-M-D-T) |
|---|---|
| D1 | Summer Pattern 1: 2008-08-02-12 |
| D2 | Summer Pattern 2: 2012-06-08-12 |
| D3 | Summer Pattern 3: 2012-08-29-12 |
| D4 | Winter Pattern 1: 2006-12-30-12 |
| D5 | Winter Pattern 2: 2011-02-22-12 |
| D6 | Winter Pattern 3: 2009-02-17-12 |
| D7 | Winter Pattern 4: 2010-02-19-12 |
| D8 | Winter Pattern 5: 2008-02-04-12 |
Appendix B. Aerodromes

| ICAO Code | IATA Code | Departure Aerodromes | Latitude | Longitude |
|---|---|---|---|---|
| EGLL | LHR | London Heathrow Airport | 51.4775 | −0.4614 |
| LFPG | CDG | Paris Charles de Gaulle Airport | 49.0097 | 2.5478 |
| ICAO Code | IATA Code | Destination Aerodromes | Latitude | Longitude |
| KJFK | JFK | John F. Kennedy International Airport | 40.6398 | −73.7789 |
| KORD | ORD | Chicago O’Hare International Airport | 41.9786 | −87.9048 |
| ICAO Code | IATA Code | En-Route-Alternate Aerodromes | Latitude | Longitude |
| KBGR | BGR | Bangor International Airport | 44.8074 | −68.8281 |
| KPBG | PBG | Plattsburgh International Airport | 44.6509 | −73.4681 |
| KPSM | PSM | Portsmouth International at Pease Airport | 43.0779 | −70.8233 |
| KRME | RME | Griffiss International Airport | 43.2338 | −75.4070 |
| CYBG | YBG | CFB Bagotville | 48.3306 | −70.9964 |
| CYHZ | YHZ | Halifax/Stanfield International Airport | 44.8808 | −63.5086 |
| CYJT | YJT | Stephenville Airport | 48.5442 | −58.5500 |
| CYMX | YMX | Montreal International (Mirabel) Airport | 45.6795 | −74.0387 |
| CYOW | YOW | Ottawa Macdonald-Cartier International Airport | 45.3225 | −75.6692 |
| CYQM | YQM | Greater Moncton International Airport | 46.1122 | −64.6786 |
| CYQX | YQX | Gander International Airport | 48.9369 | −54.5681 |
| CYUL | YUL | Montreal/Pierre Elliott Trudeau International Airport | 45.4706 | −73.7408 |
| CYVO | YVO | Val-d’Or Airport | 48.0533 | −77.7828 |
| CYYR | YYR | Goose Bay Airport | 53.3192 | −60.4258 |
References
- Easy Access Rules for Air Operations, Regulation (EU) No 965/2012. October 2019. Available online: https://www.easa.europa.eu/sites/default/files/dfu/EasyAccessRules_for_AirOperations-Oct2019.pdf (accessed on 10 July 2020).
- Fuel Planning and Management, Sub-NPA (A), Aeroplanes—Annex I (Definitions), Part-ARO, Part-CAT. July 2016. Available online: https://www.easa.europa.eu/sites/default/files/dfu/NPA%202016-06%20%28A%29.pdf (accessed on 10 July 2020).
- Ryerson, M.S.; Hansen, M.; Hao, L.; Seelhorst, M. Landing on Empty: Estimating the Benefits from Reducing Fuel Uplift in US Civil Aviation; IOP Publishing: Bristol, UK, 2015. [Google Scholar]
- Ayra, E.; Rios, D.; Cano, J. To Fuel or Not to Fuel. Is that the Question? J. Am. Stat. Assoc. 2014, 109, 465–476. [Google Scholar] [CrossRef]
- Linke, F.; Grewe, V.; Gollnick, V. The Implications of Intermediate Stop Operations on Aviation Emissions and Climate. Meteorol. Z. 2017, 26. [Google Scholar] [CrossRef]
- Kent, E.T.; Richards, A.G. Analytic Approach to Optimal Routing for Commercial Formation Flight. J. Guid. Control. Dyn. 2015, 38. [Google Scholar] [CrossRef]
- Swaid, M.; Marks, T.; Lührs, B.; Gollnick, V. Quantification of Formation Flight Benefits under Consideration of Uncertainties on Fuel Planning. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences, Belo Horizonte, Brazil, 9–14 September 2018. [Google Scholar]
- Marks, T.; Swaid, M.; Lührs, B.; Gollnick, V. Identification of optimal rendezvous and separation areas for formation flight under consideration of wind. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences, Belo Horizonte, Brazil, 9–14 September 2018. [Google Scholar]
- Flight Planning and Fuel Management Manual. DOC 9976; Advanced 2012 Edition (Unedited); International Civil Aviation Organization: Montréal, QC, Canada, 2012.
- Lührs, B.; Linke, F.; Gollnick, V. Erweiterung eines Trajektorienrechners zur Nutzung meteorologischer Daten für die Optimierung von Flugzeugtrajektorien. In Proceedings of the 63th Deutscher Luft- und Raumfahrtkongress (DLRK), Augsburg, Germany, 16–18 September 2014. [Google Scholar]
- Murphy, A.H. Decision Making and the Value of Forecasts in a Generalized Model of the Cost-Loss Ratio Situation. Monthly Weather Rev. 1984, 113, 362–369. [Google Scholar] [CrossRef] [Green Version]
- Irvine, E.A.; Hoskins, B.J.; Shine, K.P.; Lunnon, R.W.; Froemming, C. Characterizing North Atlantic weather patterns for climate-optimal aircraft routing. Meteorol. Appl. 2013, 20, 80–93. [Google Scholar] [CrossRef] [Green Version]
- Berrisford, P.; Dee, D.; Poli, P.; Brugge, R.; Fielding, K.; Fuentes, M.; Kållberg, P.; Kobayashi, S.; Uppala, S.; Simmons, A. The ERA-Interim Archive; European Center for Medium-Range Weather Forecasts: Shinfield Park, UK, 2011. [Google Scholar]
- Marks, T.; Zumegen, C.; Gollnick, V.; Stumpf, E. Assessing formation flight benefits on trajectory level including turbulence and gust. In Proceedings of the Italian Association of Aeronautics and Astronautics XXV International Congress, Rome, Italy, 9–12 September 2019. [Google Scholar]
- Nuic, A.; Mouillet, V. User Manual for the Base of Aircraft Data (BADA) Family 4; ECC Technical/Scientific Report No. 12/11/22-58; Eurocontrol: Brussels, Belgium, 2012. [Google Scholar]
- The Boeing Company. Airplane Performance. Available online: http://www.boeing.com/assets/pdf/commercial/airports/acaps/7772sec3.pdf (accessed on 28 February 2021).
- OurAirports. 2018. Available online: https://ourairports.com/data/ (accessed on 1 January 2018).
- Thorbeck, J. With remarks by Scholz, D. DOC-Assessment Method. In Proceedings of the 3rd Symposium on Collaboration in Aircraft Design, Linköping, Sweden, 19–20 September 2013. Available online: https://www.fzt.haw-hamburg.de/pers/Scholz/Aero/TU-Berlin_DOC-Method_with_remarks_13-09-19.pdf (accessed on 28 February 2021).






| Parameter | Value |
|---|---|
| DODP 1 | CDG and LHR to JFK and JFK |
| DODP 2 | CDG and LHR to ORD and JFK |
| DODP 3 | LHR and LHR to JFK and JFK |
| DODP 4 | LHR and LHR to ORD and JFK |
| Number of meteorological days | 8 |
| Aircraft type (Ld and Fw) | B777-200 |
| Cruise Mach | 0.84 |
| Cruise Flight Level | FL390 |
| Loadfactor | 0.78 |
| Fuel reserves | 4500 kg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Swaid, M.; Marks, T.; Linke, F.; Gollnick, V. Fuel Planning Strategies Considering Operational Uncertainties of Aerodynamic Formation Flight. Aerospace 2021, 8, 67. https://doi.org/10.3390/aerospace8030067
Swaid M, Marks T, Linke F, Gollnick V. Fuel Planning Strategies Considering Operational Uncertainties of Aerodynamic Formation Flight. Aerospace. 2021; 8(3):67. https://doi.org/10.3390/aerospace8030067
Chicago/Turabian StyleSwaid, Majed, Tobias Marks, Florian Linke, and Volker Gollnick. 2021. "Fuel Planning Strategies Considering Operational Uncertainties of Aerodynamic Formation Flight" Aerospace 8, no. 3: 67. https://doi.org/10.3390/aerospace8030067