
Multi-Objective and Multi-Phase 4D Trajectory Optimization for Climate Mitigation-Oriented Flight Planning


Abstract
:1. Introduction
1.1. 4D Trajectory Optimization
1.2. Climate Mitigation-Oriented Flight Planning
2. Materials and Methods
2.1. Direct Trajectory Optimization
2.2. Aircraft Model
2.2.1. State Equations
2.2.2. Performance Model
2.2.3. Emissions Model
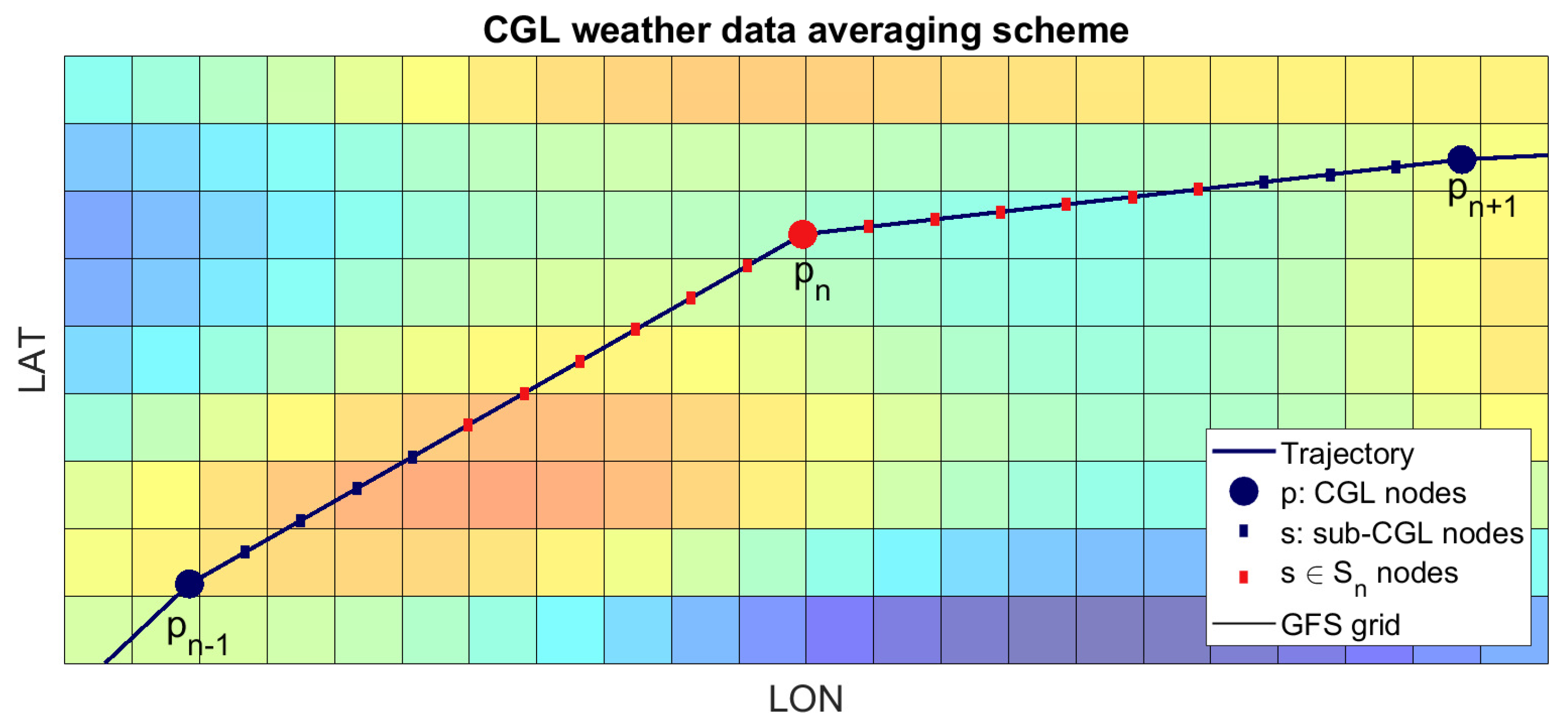
2.3. Atmosphere Model
Sub-CGL Grid
2.4. Aircraft-Induced Clouds Model
2.5. Multi-Objective Cost Functional
2.5.1. Direct Operating Cost
2.5.2. Environmental Cost
2.5.3. Multi-Objective Cost Function
2.6. Multi-Phase Trajectory Optimization
2.6.1. Climb Phase
Climb Phase Cost Function
- (i)
- the lateral path of the approximated cruise lays on the geodesic curve that links the TOC to WP2 (i.e., minimum distance lateral path);
- (ii)
- the TOD of the approximated cruise corresponds to WP2 since for long-haul flights the descent track path distance is negligible when compared to cruise distance, hence . This assumption allows the avoidance of the estimation of the TOD for each iteration of the cost function;
- (iii)
- the vertical path and the true airspeed of the aircraft for each point in the cruise trajectory are such that the SPR is maximized. Hence:where is cruise ground distance.
Climb Phase Initial Guess
2.6.2. Cruise Phase
Cruise Phase Cost Function
Cruise Phase Initial Guess
2.6.3. Descent Phase
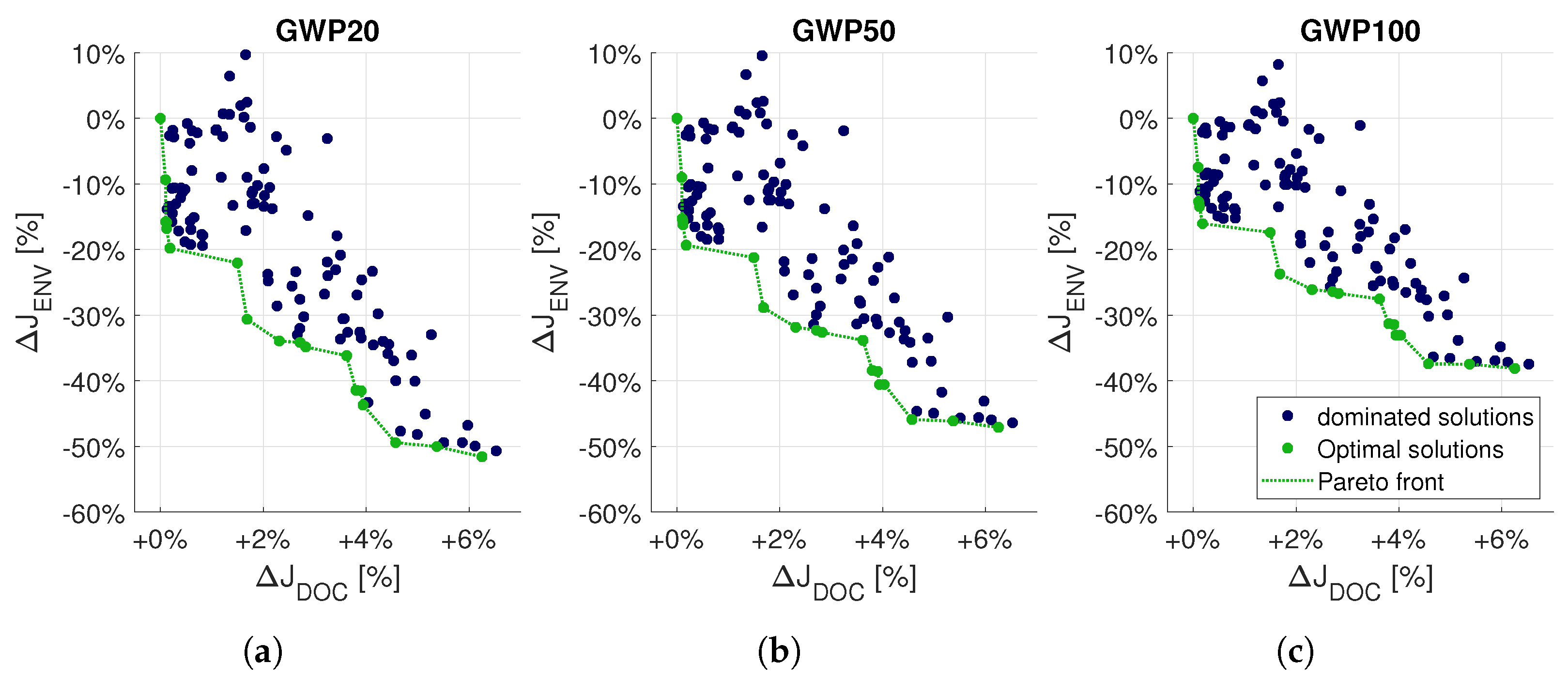
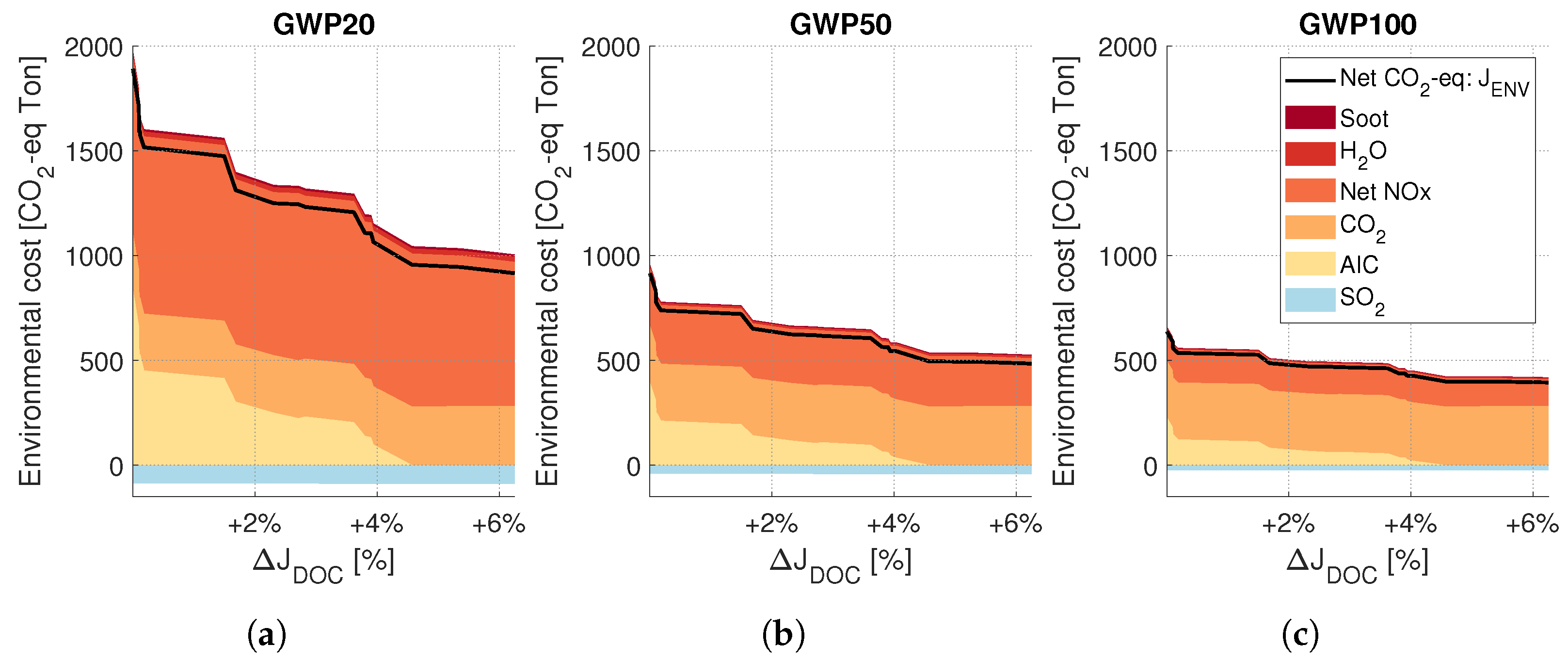
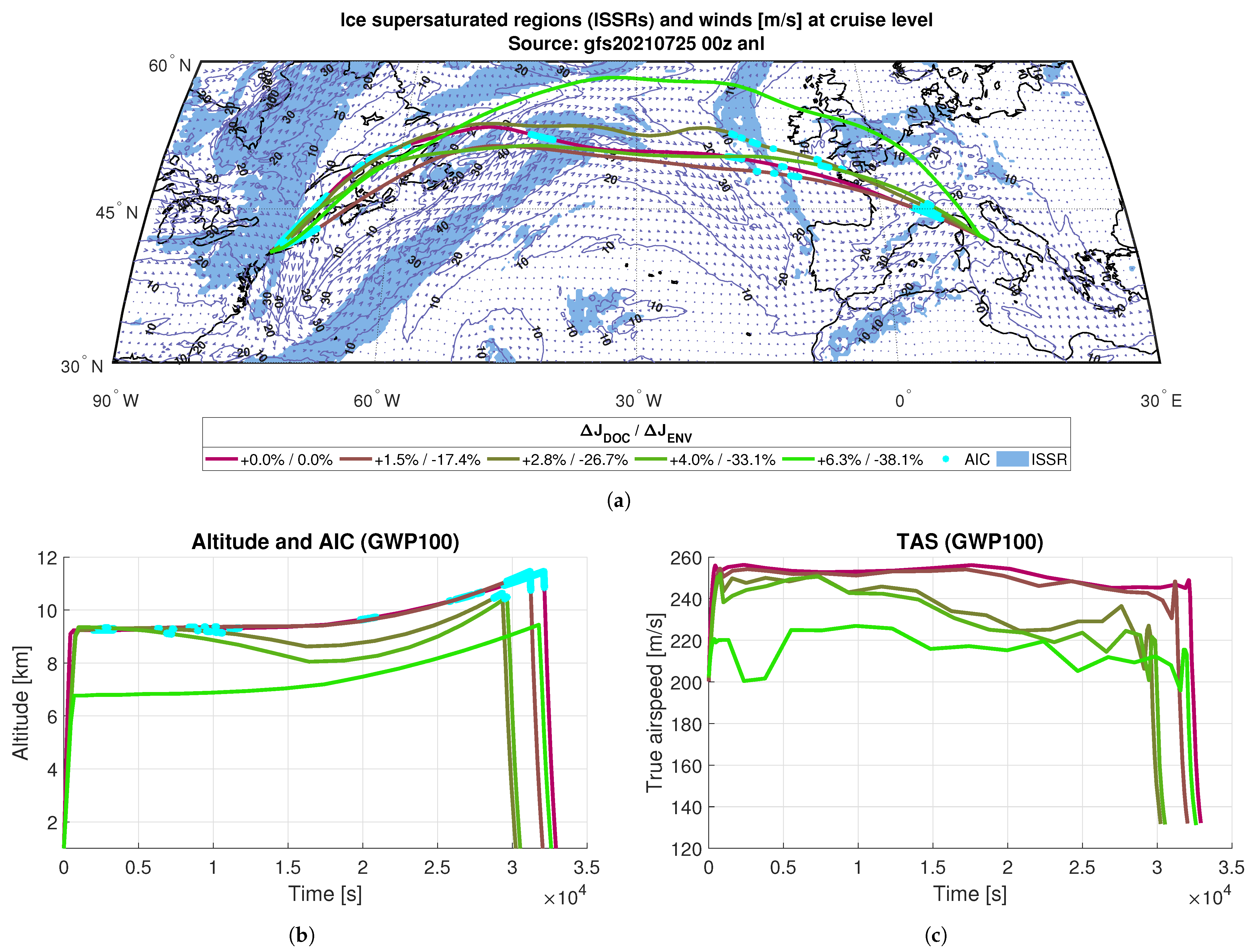
3. Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AIC | Aircraft-induced clouds | GWP | Global Warming Potential |
| ATC | Air Traffic Control | ISSR | Ice supersaturated regions |
| ATM | Air Traffic Management | NLP | Nonlinear Programming problem |
| BADA | Base of aircraft data | OCP | Optimal Control Problem |
| BM2 | Boeing Fuel Flow Method 2 | RE | Route extension |
| CGL | Chebyshev-Gauss-Lobatto | REI | Relative Emission In |
| DOC | Direct Operating Cost | RF | Radiative Forcing |
| DOF | Degrees of freedom | RH | Relative Humi |
| EI | Emission Index | ROC | Rate of Climb |
| ENV | Environmental Cost | SAC | Schmidt-Appleman Criterion |
| ERF | Equivalent Radiative Forcing | SPR | Specific Range |
| FF | Fuel Fl | TOC | Top of Climb |
| FMS | Flight Management System | TOD | Top of Descent |
| GFS | Global Forecast System | TSFC | Thrust Specific Fuel Consumpti |
| GHG | Greenhouse Gas | WP | Waypoint |
References
- Lee, D.S.; Fahey, D.W.; Forster, P.M.; Newton, P.J.; Wit, R.C.; Lim, L.L.; Owen, B.; Sausen, R. Aviation and Global Climate Change in the 21st Century. Atmos. Environ. 2009, 43, 3520–3537. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eurocontrol, Free Route Airspace. Available online: https://www.eurocontrol.int/concept/free-route-airspace (accessed on 12 October 2021).
- AIP Italia, ENAV, FRAIT—Free Route Italy. Available online: https://ec.europa.eu/transport/sites/default/files/AIC_A_2016_11.pdf (accessed on 12 October 2021).
- EASA. European Aviation Environmental Report. 2019. Available online: https://www.easa.europa.eu/eaer/ (accessed on 12 October 2021).
- Eurocontrol, Free Routes Airspace (FRA) Design Guidelines. Available online: https://www.eurocontrol.int/sites/default/files/2020-11/fra-design-guidelines-1.0.pdf (accessed on 12 October 2021).
- Kistan, T.; Gardi, A.; Sabatini, R.; Ramasamy, S.; Batuwangala, E. An evolutionary outlook of air traffic flow management techniques. Prog. Aerosp. Sci. 2017, 88, 15–42. [Google Scholar] [CrossRef]
- Betts, J.T. Survey of Numerical Methods for Trajectory Optimization. J. Guid. Control Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- Rao, A.V. Survey of Numerical Methods for Optimal Control. Adv. Astronaut. Sci. 2010, 135, 497–528. [Google Scholar]
- Hagelauer, P.; Mora-Camino, F. Flight Management Systems and Aircraft 4D Trajectory Optimization. IFAC Proc. Vol. 1997, 30, 351–356. [Google Scholar] [CrossRef]
- Bryson, A.; Ho, Y.C. Numerical solution of optimal programming and control problems. In Applied Optimal Control: Optimization, Estimation, and Control, 1st ed.; Taylor & Francis: Abingdon, UK, 1975; pp. 212–243. [Google Scholar]
- Fornberg, B.; Sloan, D.M. A review of pseudospectral methods for solving partial differential equations. Acta Numer. 1994, 3, 203–267. [Google Scholar] [CrossRef]
- The Optimal Control Problem. Practical Methods for Optimal Control and Estimation Using Nonlinear Programming, 2nd ed.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010; pp. 123–217. [Google Scholar]
- Ross, I.M.; Fahroo, F. Pseudospectral Knotting Methods for Solving Nonsmooth Optimal Control Problems. J. Guid. Control. Dyn. 2004, 27, 397–405. [Google Scholar] [CrossRef]
- Betts, J.T.; Cramer, E.J. Application of Direct Transcription to Commercial Aircraft Trajectory Optimization. J. Guid. Control Dyn. 1995, 18, 151–159. [Google Scholar] [CrossRef]
- Soler, M.; Olivares, A.; Staffetti, E. Multiphase Optimal Control Framework for Commercial Aircraft Four-Dimensional Flight-Planning Problems. J. Aircr. 2015, 52, 274–286. [Google Scholar] [CrossRef]
- Rao, A.V.; Benson, D.A.; Darby, C.; Patterson, M.A.; Francolin, C.; Sanders, I.; Huntington, G.T. Algorithm 902: GPOPS, A MATLAB Software for Solving Multiple-Phase Optimal Control Problems Using the Gauss Pseudospectral Method. ACM Trans. Math. Softw. 2010, 37, 1–39. [Google Scholar] [CrossRef]
- Ross, I.M. Enhancements to the DIDO Optimal Control Toolbox. arXiv 2020, arXiv:math.OC/2004.13112. Available online: https://arxiv.org/pdf/2004.13112.pdf (accessed on 12 October 2021).
- Rutquist, E.; Edvall, M.M. PROPT-Matlab Optimal Control Software. Available online: https://www.tomopt.com/docs/TOMLAB_PROPT.pdf (accessed on 12 October 2021).
- Cassaro, M.; Gunetti, P.; Battipede, M.; Gili, P. Overview of the Multipurpose Aircraft Simulation Laboratory experience. In Proceedings of the 2013 Aviation Technology, Integration, and Operations Conference, Los Angeles, CA, USA, 12–14 August 2013. [Google Scholar]
- Sirigu, G.; Battipede, M.; Gili, P.; Cassaro, M. FMS and AFCS Interface for 4D Trajectory Operations; SAE Technical Paper-2015; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- Mazzotta, D.G.; Sirigu, G.; Cassaro, M.; Battipede, M.; Gili, P. 4D Trajectory Optimization Satisfying Waypoint and No-Fly Zone Constraints. WSEAS Trans. Syst. Control 2017, 12, 221–231. [Google Scholar]
- Nuic, A.; Poles, D.; Moulliet, V. BADA: An advanced aircraft performance model for present and future ATM systems. Int. J. Adapt. Control Signal Process. 2010, 24, 850–866. [Google Scholar] [CrossRef]
- Hanke, C.; Nordwall, D. The simulation of a jumbo jet Transport aircraft Volume II: Modeling data. In D6-30643; The Boeing Company: Wichita, KS, USA, 1970. [Google Scholar]
- Fahroo, F.; Ross, I.M. Direct Trajectory Optimization by a Chebyshev Pseudospectral Method. J. Guid. Control Dyn. 2002, 25, 160–166. [Google Scholar] [CrossRef] [Green Version]
- Lufthansa Systems, Lido Flight 4D. Available online: https://www.lhsystems.com/solutions-services/operations-solutions/lidoflightplanning/lidoflight4D (accessed on 12 October 2021).
- Montzka, S.A.; Dlugokencky, E.J.; Butler, J.H. Non-CO2 greenhouse gases and climate change. Nature 2011, 476, 43–50. [Google Scholar] [CrossRef]
- Lee, D.; Fahey, D.; Skowron, A.; Allen, M.; Burkhardt, U.; Chen, Q.; Doherty, S.; Freeman, S.; Forster, P.; Fuglestvedt, J.; et al. The contribution of global aviation to anthropogenic climate forcing for 2000 to 2018. Atmos. Environ. 2021, 244, 117834. [Google Scholar] [CrossRef] [PubMed]
- ICAO. Assessing Current Scientific Knowledge, Uncertainties and Gaps in Quantifying Climate Change, Noise and Air Quality Aviation Impacts. Available online: https://www.icao.int/environmental-protection/Documents/CaepImpactReport.pdf (accessed on 12 October 2021).
- Park, S.G.; Clarke, J.P. Vertical Trajectory Optimization to Minimize Environmental Impact in the Presence of Wind. J. Aircr. 2016, 53, 725–737. [Google Scholar] [CrossRef] [Green Version]
- Sirigu, G.; Clarke, J.P.; Battipede, M.; Gili, P. Hybrid Particle Swarm Optimization with Parameter Fixing: Application to Automatic Taxi Management. J. Air Transp. 2020, 28, 36–48. [Google Scholar] [CrossRef]
- Kärcher, B. Formation and radiative forcing of contrail cirrus. Nat. Commun. 2018, 9, 117834. [Google Scholar] [CrossRef] [PubMed]
- Sridhar, B.; Ng, H.K.; Chen, N.Y. Aircraft Trajectory Optimization and Contrails Avoidance in the Presence of Winds. J. Guid. Control Dyn. 2011, 34, 1577–1584. [Google Scholar] [CrossRef]
- Soler, M.; Zou, B.; Hansen, M. Contrail Sensitive 4D Trajectory Planning with Flight Level Allocation Using Multiphase Mixed-Integer Optimal Control. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Irvine, E.A.; Hoskins, B.J.; Shine, K.P. A simple framework for assessing the trade-off between the climate impact of aviation carbon dioxide emissions and contrails for a single flight. Environ. Res. Lett. 2014, 9, 064021. [Google Scholar] [CrossRef]
- Rosenow, J.; Fricke, H. Individual Condensation Trails in Aircraft Trajectory Optimization. Sustainability 2019, 11, 6082. [Google Scholar] [CrossRef] [Green Version]
- Teoh, R.; Schumann, U.; Majumdar, A.; Stettler, M.E.J. Mitigating the Climate Forcing of Aircraft Contrails by Small-Scale Diversions and Technology Adoption. Environ. Sci. Technol. 2020, 54, 2941–2950. [Google Scholar] [CrossRef] [PubMed]
- Matthes, S.; Lührs, B.; Dahlmann, K.; Grewe, V.; Linke, F.; Yin, F.; Klingaman, E.; Shine, K.P. Climate-Optimized Trajectories and Robust Mitigation Potential: Flying ATM4E. Aerospace 2020, 7, 156. [Google Scholar] [CrossRef]
- Myhre, G.; Shindell, D.; Pongratz, J. Intergovernmental Panel on Climate Change, Anthropogenic and Natural Radiative Forcing. In Climate Change 2013–The Physical Science Basis: Working Group I Contribution to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2014; pp. 659–740. [Google Scholar]
- DuBois, D.; Paynter, G.C. Fuel Flow Method2 for Estimating Aircraft Emissions. In Non-Conference Specific Technical Papers-2006; SAE International: Warrendale, PA, USA, 2006. [Google Scholar]
- European Union Aviation Safety Agency. ICAO Aircraft Engine Emissions Databank. Available online: https://www.easa.europa.eu/domains/environment/icao-aircraft-engine-emissions-databank (accessed on 12 October 2021).
- Schumann, U. A contrail cirrus prediction model. Geosci. Model Dev. 2012, 5, 543–580. [Google Scholar] [CrossRef] [Green Version]
- Kim, I.; de Weck, O. Adaptive weighted-sum method for bi-objective optimization: Pareto front generation. Struct. Multidiscipl. Optim. 2005, 29, 149–158. [Google Scholar] [CrossRef]
- Trefethen, L.N. Equispaced Points, Runge Phenomenon. In Approximation Theory and Approximation Practice, Extended Edition; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2019; pp. 95–102. [Google Scholar]
- Trefethen, L.N. Chebyshev Differentiation Matrices. In Spectral Methods in MATLAB; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2000; pp. 51–59. [Google Scholar]
- Waldvogel, J. Fast Construction of the Fejér and Clenshaw–Curtis Quadrature Rules. BIT Numer. Math. 2006, 46, 195–202. [Google Scholar] [CrossRef] [Green Version]
- National Weather Service: Pressure Altitude. Available online: https://www.weather.gov/media/epz/wxcalc/pressureAltitude.pdf (accessed on 12 October 2021).
- Picard, A.; Davis, R.S.; Gläser, M.; Fujii, K. Revised formula for the density of moist air (CIPM-2007). Metrologia 2008, 45, 149–155. [Google Scholar] [CrossRef]
- World Meteorological Organization (WMO). Cloud Atlas. Available online: https://cloudatlas.wmo.int/aircraft-condensation-trails.html (accessed on 12 October 2021).
- Sonntag, D. Advancements in the field of hygrometry. Meteorol. Z. 1994, 3, 51–66. [Google Scholar] [CrossRef]
- Federal Aviation Administration, Benefit-Cost Analysis: Aircraft Operating Costs. Available online: https://www.faa.gov/regulations_policies/policy_guidance/benefit_cost/media/econ-value-section-4-op-costs.pdf (accessed on 12 October 2021).
- Federal Aviation Administration, Benefit-Cost Analysis: Economic Values Related to Aircraft Performance. Available online: https://www.faa.gov/regulations_policies/policy_guidance/benefit_cost/media/econ-value-section-6-perf-factors.pdf (accessed on 12 October 2021).
- Schumann, U.; Penner, J.E.; Chen, Y.; Zhou, C.; Graf, K. Dehydration effects from contrails in a coupled contrail—Climate model. Atmos. Chem. Phys. 2015, 15, 11179–11199. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.S. Chapter 14—Multi-Objective Optimization. In Nature-Inspired Optimization Algorithms; Yang, X.S., Ed.; Elsevier: Oxford, UK, 2014; pp. 197–211. [Google Scholar]
- Bellman, R.E. The Structure of Dynamic Programming Process. In Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1957; pp. 81–115. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Emission | Emission Index (EI) |
|---|---|
| CO2 | 3.159 kg/kg fuel |
| H2O | 1.231 kg/kg fuel |
| SO2 | 1.2 g/kg fuel |
| Soot | 0.03 g/kg fuel |
| Emission | GWP20 | GWP50 | GWP100 |
|---|---|---|---|
| CO2 | 1 | 1 | 1 |
| AIC (Tg CO2 basis) | 14.87 | 6.99 | 4.04 |
| AIC (km basis) | 256 | 122 | 71 |
| Net NOX | 619 | 205 | 114 |
| Soot | 4288 | 2018 | 1166 |
| SO2 | −832 | −392 | −226 |
| Water vapor | 0.22 | 0.10 | 0.06 |
| Lat | Lon | Altitude | Aircraft Mass | Date | Time (UTC) | |
|---|---|---|---|---|---|---|
| WP1 | 41.9028 | 12.4964 | 1000 m | 340 Ton | 25 July 2021 | 00:00 |
| WP2 | 40.7306 | −73.9352 | 1000 m | - | - | - |
| Op. Costs | Env. Costs (GWP100) | Route | Fuel | AIC | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| JDOC | JDOC | JENV | JENV | Extension | Time | Mass | Length | |||
| ID | [k$] | [%] | [CO2-eq Ton] | [%] | [km] | [%] | [min] | [Ton] | [km] | [%] |
| 1 | 77.11 | - | 637.4 | - | 218 | +3.16% | 549 | 85.6 | 1607 | 22.6% |
| 2 | 77.18 | +0.10% | 589.9 | −7.4% | 91 | +1.32% | 524 | 85.6 | 1229 | 17.6% |
| 3 | 77.19 | +0.10% | 556.6 | −12.7% | 150 | +2.18% | 476 | 85.7 | 1005 | 14.3% |
| 4 | 77.20 | +0.11% | 555.4 | −12.9% | 85 | +1.23% | 517 | 85.7 | 966 | 13.8% |
| 5 | 77.20 | +0.12% | 551.8 | −13.4% | 86 | +1.24% | 532 | 85.6 | 969 | 13.9% |
| 6 | 77.25 | +0.18% | 535.2 | −16.0% | 97 | +1.41% | 515 | 85.8 | 850 | 12.1% |
| 7 | 78.26 | +1.50% | 526.6 | −17.4% | 91 | +1.32% | 534 | 86.7 | 753 | 10.8% |
| 8 | 78.41 | +1.68% | 486.3 | −23.7% | 187 | +2.71% | 501 | 86.5 | 575 | 8.1% |
| 9 | 78.89 | +2.31% | 471.1 | −26.1% | 106 | +1.53% | 518 | 86.8 | 407 | 5.8% |
| 10 | 79.20 | +2.71% | 469.1 | −26.4% | 117 | +1.70% | 495 | 87.3 | 367 | 5.2% |
| 11 | 79.29 | +2.82% | 467.5 | −26.7% | 255 | +3.69% | 504 | 87.3 | 411 | 5.8% |
| 12 | 79.90 | +3.62% | 461.9 | −27.5% | 77 | +1.11% | 518 | 87.9 | 363 | 5.2% |
| 13 | 80.04 | +3.80% | 438.0 | −31.3% | 75 | +1.09% | 529 | 87.8 | 211 | 3.0% |
| 14 | 80.12 | +3.90% | 437.1 | −31.4% | 372 | +5.39% | 507 | 87.9 | 220 | 3.0% |
| 15 | 80.15 | +3.94% | 426.8 | −33.0% | 197 | +2.86% | 526 | 88.0 | 155 | 2.2% |
| 16 | 80.22 | +4.03% | 426.7 | −33.1% | 170 | +2.47% | 509 | 88.1 | 123 | 1.7% |
| 17 | 80.63 | +4.57% | 398.9 | −37.4% | 222 | +3.22% | 517 | 88.3 | 0 | 0.0% |
| 18 | 81.25 | +5.37% | 398.7 | −37.4% | 427 | +6.19% | 539 | 88.9 | 0 | 0.0% |
| 19 | 81.93 | +6.25% | 394.5 | −38.1% | 357 | +5.17% | 543 | 89.3 | 0 | 0.0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vitali, A.; Battipede, M.; Lerro, A. Multi-Objective and Multi-Phase 4D Trajectory Optimization for Climate Mitigation-Oriented Flight Planning. Aerospace 2021, 8, 395. https://doi.org/10.3390/aerospace8120395
Vitali A, Battipede M, Lerro A. Multi-Objective and Multi-Phase 4D Trajectory Optimization for Climate Mitigation-Oriented Flight Planning. Aerospace. 2021; 8(12):395. https://doi.org/10.3390/aerospace8120395
Chicago/Turabian StyleVitali, Alessio, Manuela Battipede, and Angelo Lerro. 2021. "Multi-Objective and Multi-Phase 4D Trajectory Optimization for Climate Mitigation-Oriented Flight Planning" Aerospace 8, no. 12: 395. https://doi.org/10.3390/aerospace8120395