
Orbital Design and Control for Jupiter-Observation Spacecraft


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Orbit Selection for Jupiter-Observation
2.1. Sun-Synchronous Orbits
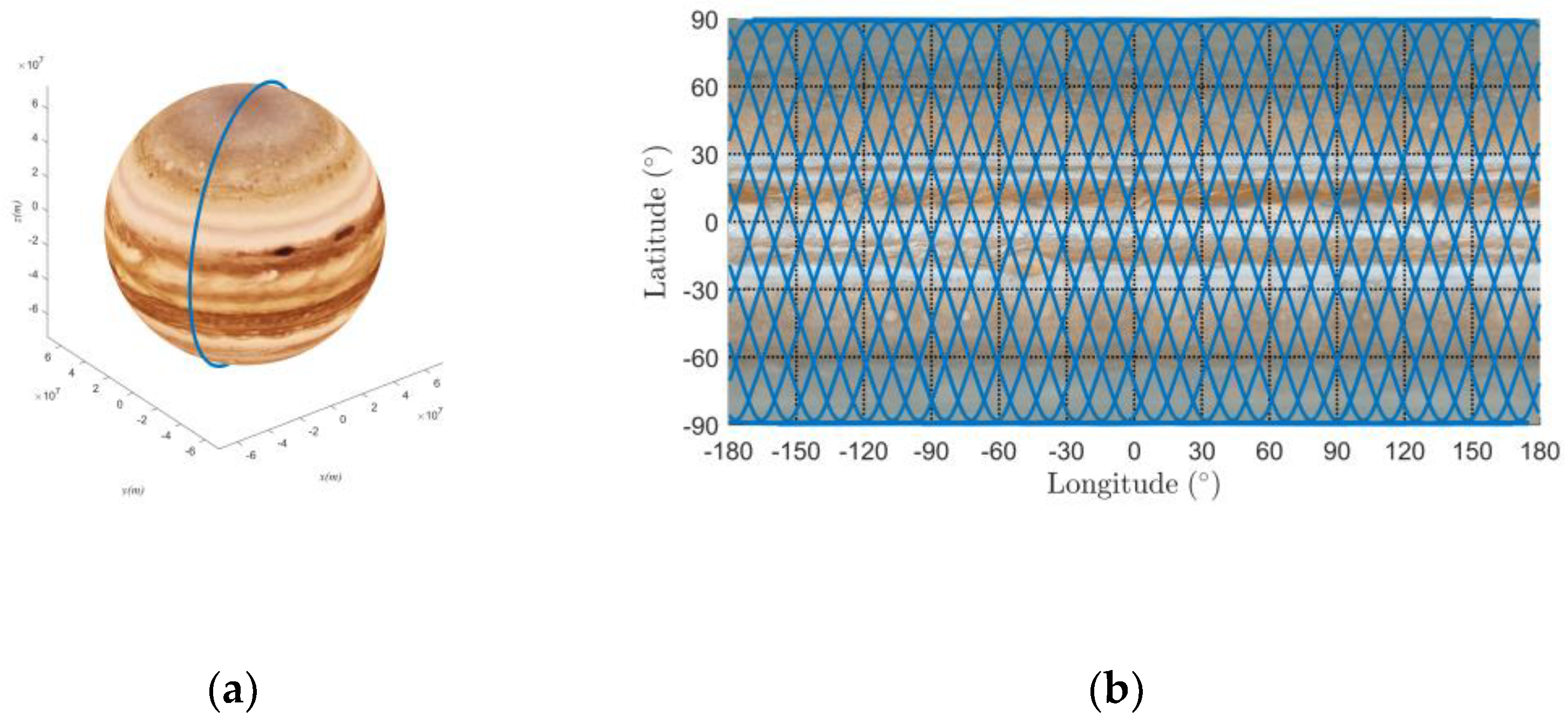
2.2. Repeating Ground Track Orbits
2.3. Sun-Synchronous Repeating Ground Track Orbits
3. Perturbation and Control of Orbits around Jupiter
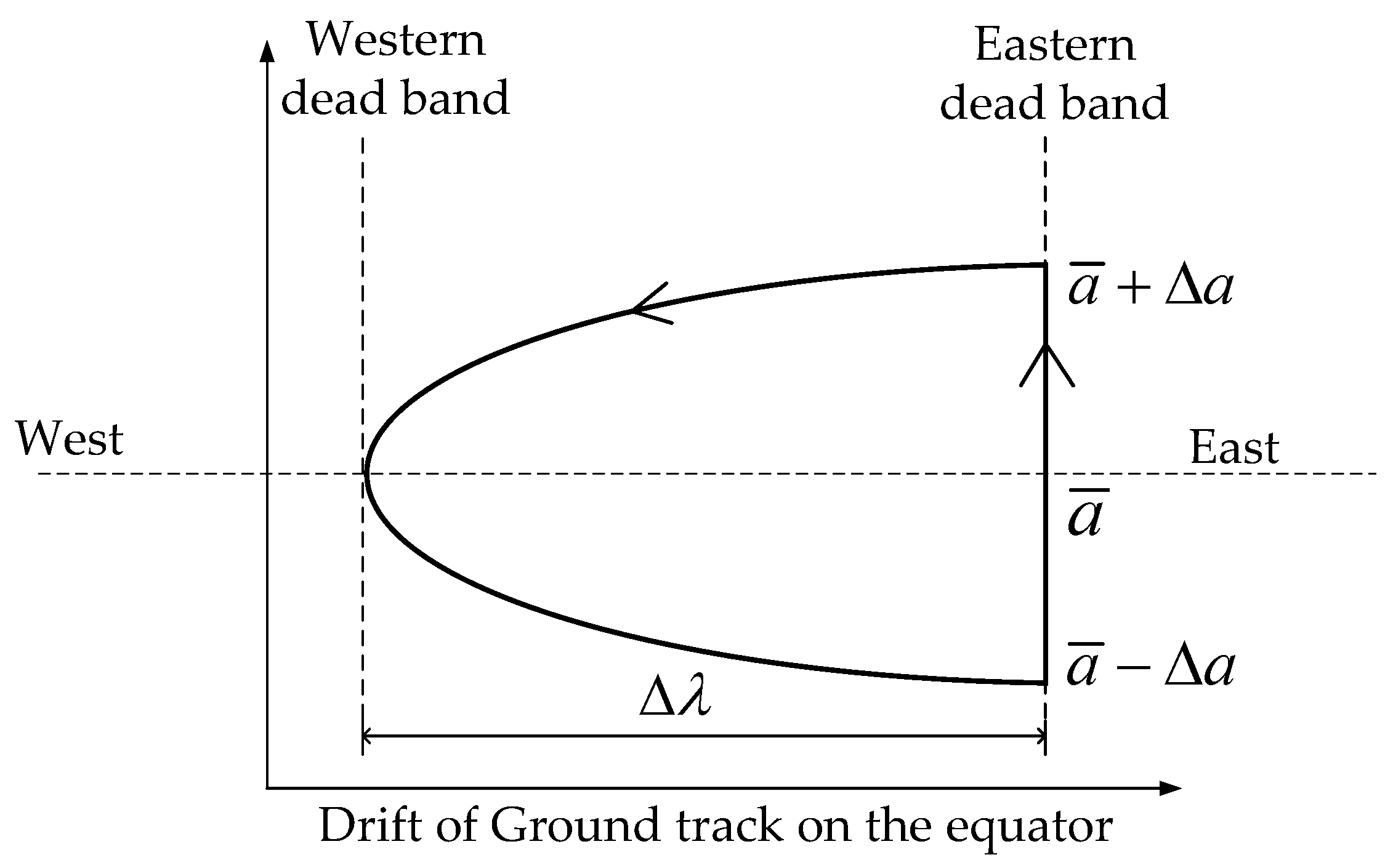
3.1. Influence on Semimajor Axis Caused by the Atmosphere
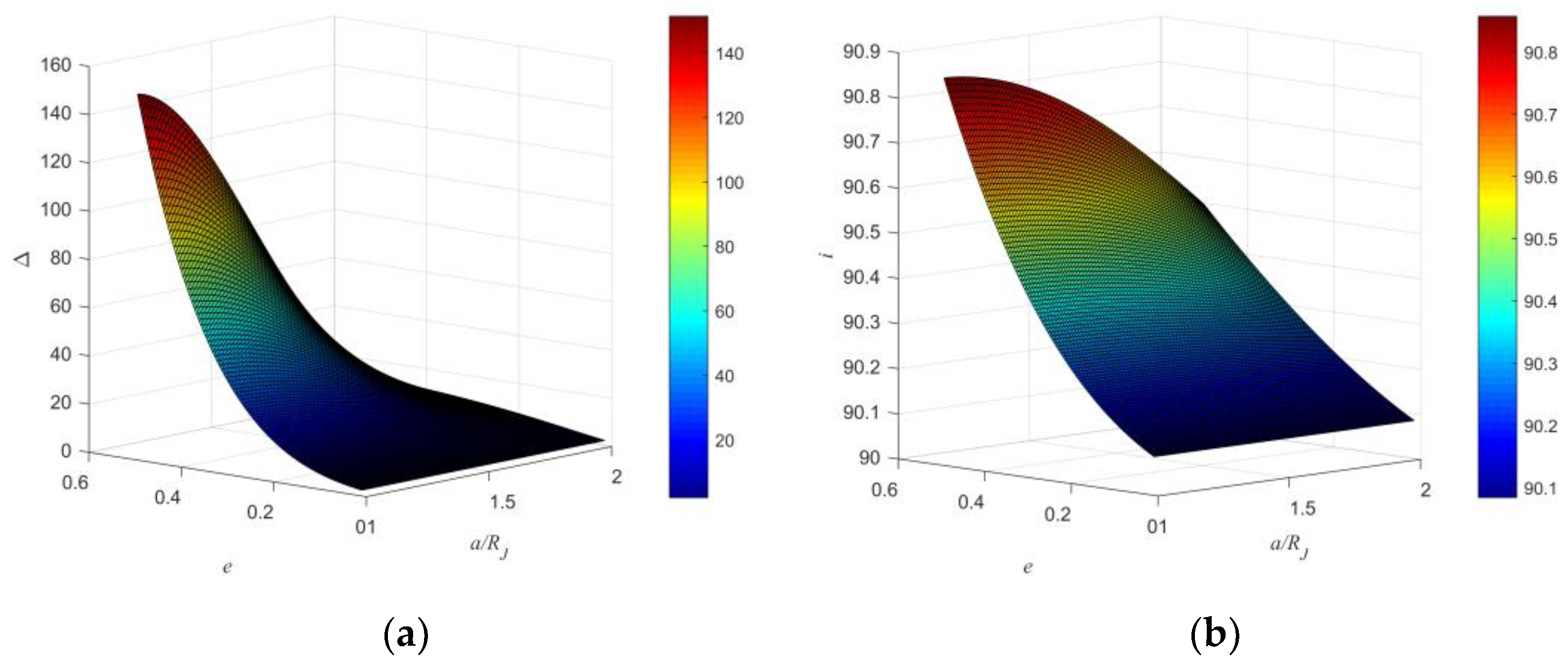
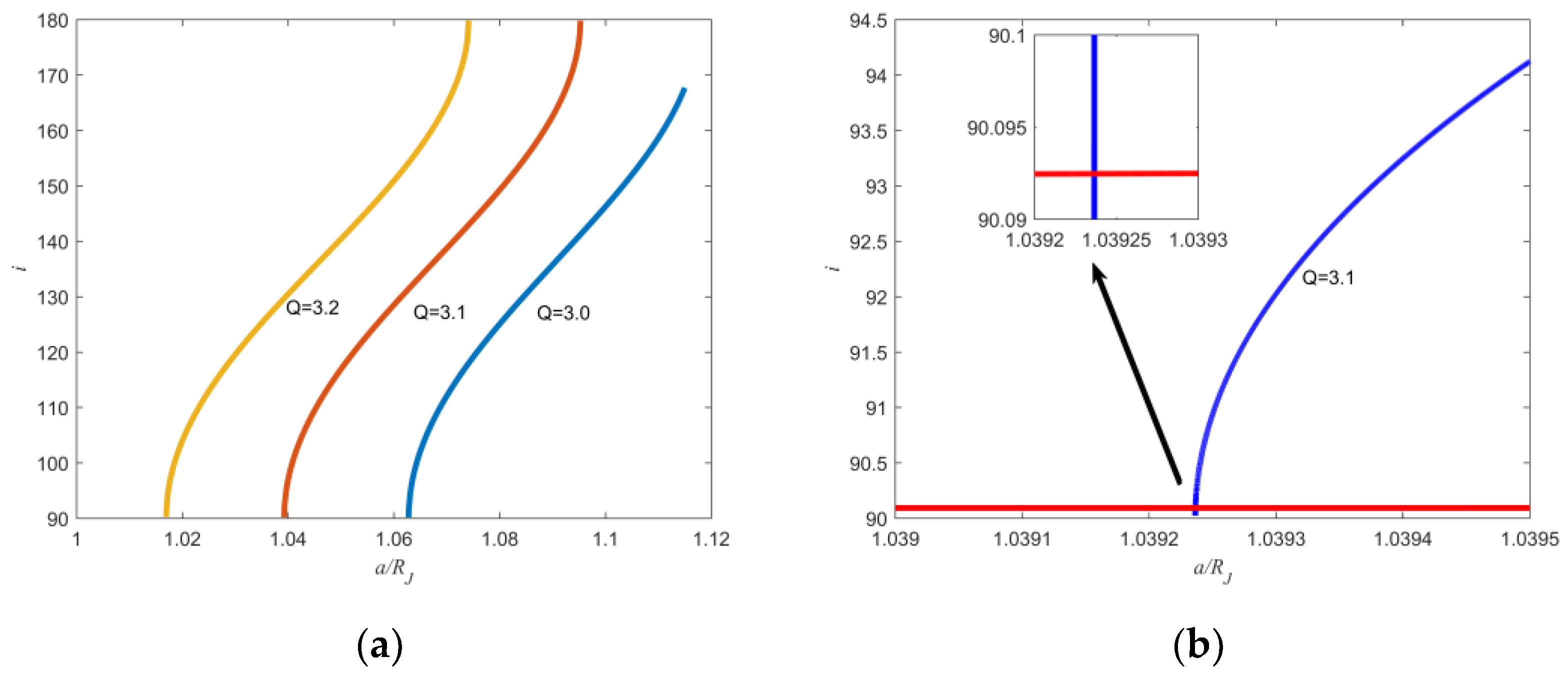
3.2. Influence on Orbital Inclination Caused by the Sun’s Gravity
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Brusch, R.G. Trajectory Optimization for the Atlas/Centaur Launch Vehicle. In Proceedings of the 1976 IEEE Conference on Decision and Control including the 15th Symposium on Adaptive Processes, Clearwater, FL, USA, 1–3 December 1976; pp. 492–500. [Google Scholar]
- Huang, G.Q.; Lu, Y.P.; Nan, Y. A survey of numerical algorithms for trajectory optimization of flight vehicles. Sci. China Technol. Sci. 2012, 55, 2538–2560. [Google Scholar] [CrossRef]
- Brusch, R.G. Constrained impulsive trajectory optimization for orbit-to-orbit transfer. J. Guid. Control. Dyn. 1979, 2, 204–212. [Google Scholar] [CrossRef]
- Sims, J.; Finlayson, P.; Rinderle, E.; Vavrina, M.; Kowalkowski, T. Implementation of a low-thrust trajectory optimization algorithm for preliminary design. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Boston, MA, USA, 21–24 August 2006; p. 6746. [Google Scholar]
- Morante, D.; Sanjurjo Rivo, M.; Soler, M. Multi-objective low-thrust interplanetary trajectory optimization based on generalized logarithmic spirals. J. Guid. Control. Dyn. 2019, 42, 476–490. [Google Scholar] [CrossRef]
- D’Amario, L.A.; Byrnes, D.V.; Stanford, R.H. Interplanetary trajectory optimization with application to Galileo. J. Guid. Control. Dyn. 1981, 5, 465–471. [Google Scholar] [CrossRef]
- Li, X.; Qiao, D.; Chen, H. Interplanetary transfer optimization using cost function with variable coefficients. Astrodynamics 2019, 3, 173–188. [Google Scholar] [CrossRef]
- Huang, A.Y.; Yan, B.; Li, Z.Y.; Shu, P.; Luo, Y.Z.; Yang, Z. Orbit design and mission planning for global observation of Jupiter. Astrodynamics 2021, 5, 39–48. [Google Scholar] [CrossRef]
- Circi, C.; Ortore, E.; Bunkheila, F.; Ulivieri, C. Elliptical multi-sun-synchronous orbits for mars exploration. Celest. Mech. Dyn. Astron. 2012, 114, 215–227. [Google Scholar] [CrossRef]
- Xue, M.; Li, J. Distant quasi-periodic orbits around mercury. Astrophys. Space Sci. 2013, 343, 83–93. [Google Scholar]
- Liu, X.; Baoyin, H.; Ma, X. Analytical investigations of quasi-circular frozen orbits in the martian gravity field. Celest. Mech. Dyn. Astron. 2011, 109, 303–320. [Google Scholar] [CrossRef]
- Xue, M.; Li, J. Artificial frozen orbits around mercury. Astrophys. Space Sci. 2013, 348, 345–365. [Google Scholar]
- Rogers, J.H. The Giant Planet Jupiter; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Whiffen, G.J. An investigation of a Jupiter Galilean moon orbiter trajectory. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Big Sky, Montana, 3–7 August 2003. [Google Scholar]
- Meltzer, M. Mission to Jupiter: A history of the Galileo project. NASA STI/Recon Tech. Rep. N 2007, 7, 13975. [Google Scholar]
- Matousek, S. The Juno new frontiers mission. Acta Astronaut. 2007, 61, 932–939. [Google Scholar] [CrossRef]
- Witasse, O. JUICE (Jupiter Icy Moon Explorer): A European mission to explore the emergence of habitable worlds around gas giants. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 3–8 April 2011. [Google Scholar]
- Bolton, S.J.; Adriani, A.; Adumitroaie, V.; Allison, M.; Anderson, J.; Atreya, S.; Bloxham, J.; Brown, S.; Connerney, J.E.P.; DeJong, E.; et al. Jupiter’s interior and deep atmosphere: The initial pole-to-pole passes with the Juno spacecraft. Science 2017, 356, 821–825. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barbieri, C.; Rahe, J.H.; Johnson, T.V.; Sohus, A.M. The Three Galileos: The Man, the Spacecraft, the Telescope; Springer Science & Business Media: Secaucus, NJ, USA, 2013. [Google Scholar]
- Bolton, S.J.; Lunine, J.; Stevenson, D.; Connerney, J.E.P.; Levin, S.; Owen, T.C. The Juno mission. Space Sci. Rev. 2017, 213, 5–37. [Google Scholar] [CrossRef]
- Liu, X.; Schmidt, J. Dust in the Jupiter system outside the rings. Astrodynamics 2019, 3, 17–29. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Jiang, Y.; Li, H.; Zhang, H. Some special types of orbits around Jupiter. Aerospace 2021, 8, 183. [Google Scholar] [CrossRef]
- The State Council Information Office of the People’s Republic of China. China’s Space Activities in 2016. Available online: http://www.cnsa.gov.cn/english/n6465652/n6465653/c6768527/content.html (accessed on 19 July 2021).
- Ortore, E.; Circi, C.; Ulivieri, C.; Cinelli, M. Multi-sunsynchronous orbits in the solar system. Earth Moon Planets 2014, 111, 157–172. [Google Scholar] [CrossRef]
- Aorpimai, M.; Palmer, P.L. Repeat-groundtrack orbit acquisition and maintenance for earth-observation satellites. J. Guid. Control. Dyn. 2012, 30, 654–659. [Google Scholar] [CrossRef]
- Liu, X.; Baoyin, H.; Ma, X. Five special types of orbits around Mars. J. Guid. Control. Dyn. 2011, 33, 1294–1301. [Google Scholar] [CrossRef]
- Arnas, D. Linearized model for satellite station-keeping and tandem formations under the effects of atmospheric drag. Acta Astronaut. 2020, 178, 835–845. [Google Scholar] [CrossRef]
- Nazarenko, A.I. Sun synchronous orbits. predicting the local solar time of the ascending node. Acta Astronaut. 2021, 181, 585–593. [Google Scholar] [CrossRef]
- Wu, Z.; Jiang, F.; Li, J. Artificial Martian frozen orbits and sun-synchronous orbits using continuous low-thrust control. Astrophys. Space Sci. 2014, 352, 503–514. [Google Scholar] [CrossRef]
- Vedder, J.D.; Tabor, J.L. New method for estimating low-earth-orbit collision probabilities. J. Spacecr. Rocket. 1991, 28, 210–215. [Google Scholar] [CrossRef]
- Wang, T. Analysis of Debris from the Collision of the Cosmos 2251 and the Iridium 33 Satellites. Sci. Glob. Secur. 2010, 18, 87–118. [Google Scholar] [CrossRef]
- Iess, L.; Folkner, W.M.; Durante, D.; Parisi, M.; Kaspi, Y.; Galanti, E. Measurement of Jupiter’s asymmetric gravity field. Nature 2018, 555, 220–222. [Google Scholar] [CrossRef]
- Lyons, D.T.; Beerer, J.G.; Esposito, P.; Johnston, M.D.; Willcockson, W.H. Mars global surveyor: Aerobraking mission overview. J. Spacecr. Rocket. 1999, 36, 307–313. [Google Scholar] [CrossRef] [Green Version]
- Brouwer, D. Solution of the Problem of Artificial Satellite Theory without Drag; Yale University: New Haven, CT, USA, 1959. [Google Scholar]
- Seiff, A.; Kirk, D.B.; Knight, T.C.; Mihalov, J.D.; Blanchard, R.C.; Young, R.E. Structure of the atmosphere of Jupiter: Galileo probe measurements. Science 1996, 272, 844–845. [Google Scholar] [CrossRef] [PubMed]
- Seiff, A.; Kirk, D.B.; Knight, T.C.; Young, L.A.; Milos, F.S.; Venkatapathy, E. Thermal structure of Jupiter’s upper atmosphere derived from the Galileo probe. Science 1997, 276, 102–104. [Google Scholar] [CrossRef]
- Jiang, Y. Control of Satellite Formation Flying and Constellation. in press.








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Liu, Y.; Jiang, Y.; Li, H. Orbital Design and Control for Jupiter-Observation Spacecraft. Aerospace 2021, 8, 282. https://doi.org/10.3390/aerospace8100282
Jiang C, Liu Y, Jiang Y, Li H. Orbital Design and Control for Jupiter-Observation Spacecraft. Aerospace. 2021; 8(10):282. https://doi.org/10.3390/aerospace8100282
Chicago/Turabian StyleJiang, Chunsheng, Yongjie Liu, Yu Jiang, and Hengnian Li. 2021. "Orbital Design and Control for Jupiter-Observation Spacecraft" Aerospace 8, no. 10: 282. https://doi.org/10.3390/aerospace8100282