3.1. Pareto Sets of Flight Performance for Selection of Optimal Propellers
Multi-objective optimization by means of Pareto sets is based on search for boundary values of objective functions dependent on the same variable
X of these functions. Values of objective functions are evaluated for every value of the independent variable
X and plotted in the graph (see
Figure 1). An element of Pareto set represents mutual relation of all considered objective functions for one given value of the independent variable
X.
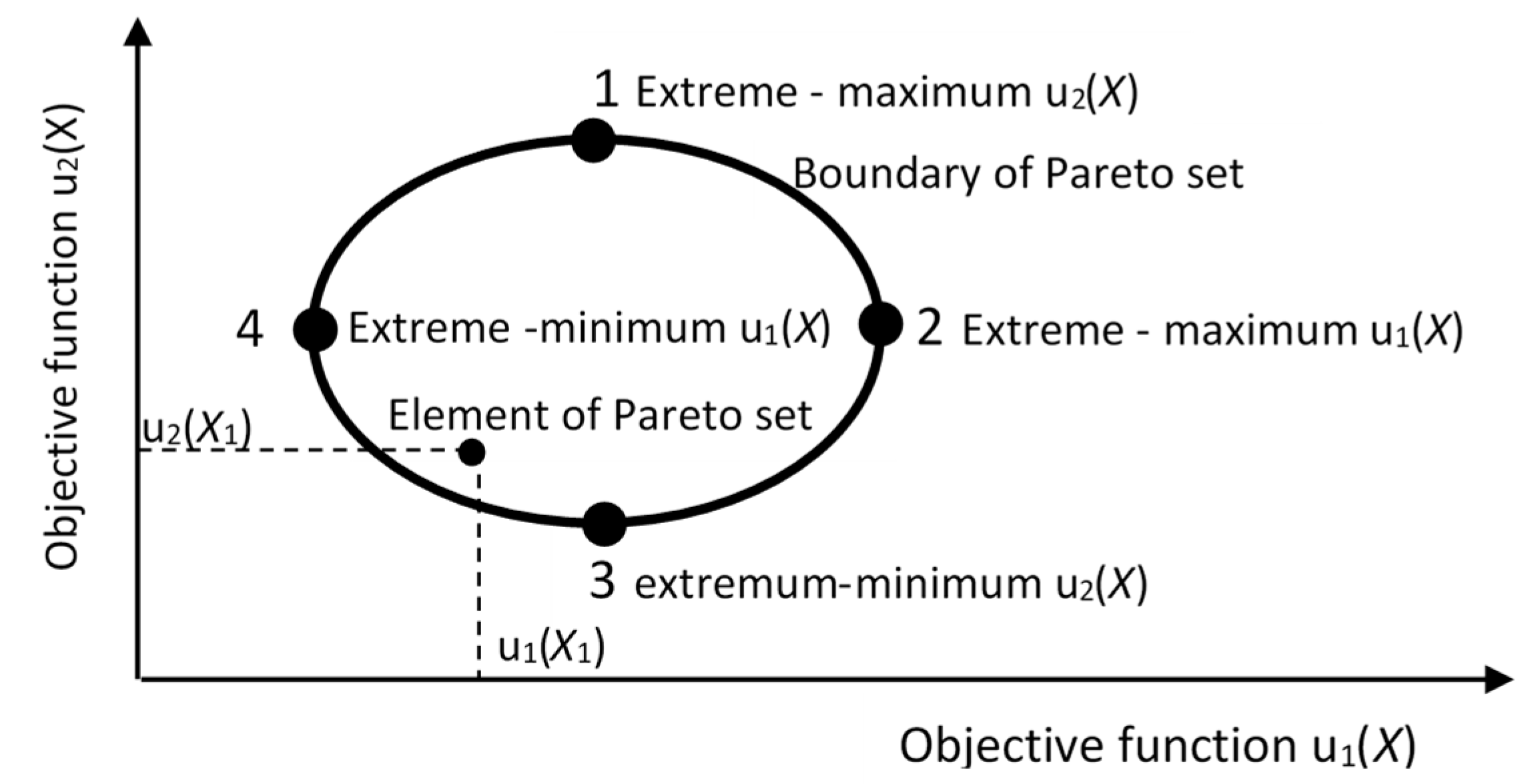
In the case of multi-objective optimization with two objective functions, Pareto sets have the form of plane graphs. One axis represents values of the first objective function and the second one values of the second objective function, as shown in
Figure 1. Corresponding pairs of both functions (for the same variable values
X) create Pareto set as the area of the graph. The set area limits are bound to a defined condition range of an independent variable for each function. The bound of Pareto sets makes outer limits of achievable values of the objective functions.
Peak points of the bound (Points 1, 2, 3, and 4 in
Figure 1) depict extremes (minimum, maximum) of one and the other objective functions. Parts of the boundary between extremes match optimal values of variable
X, because if the extremes of both these functions are simultaneously required (e.g., maximum 1 for
u2(
X) and maximum 2 for
u1(
X)), the extreme is achievable only for the first or second function. The change on Pareto boundary when dropping under the extreme of the first function approximates in the optimal way the solution to the extreme of the second function (for each variable
X, between 1 and 2, both functions reach their maximum values). All variables
X on Pareto boundary between these two extremes (Pareto-optimal front) are optimal (the most appropriate) because it is not possible to decide which combination of both objective functions is better. None of these solutions is worse or better—the solutions are mutually non-dominant.
In the case that the extreme of one function is also the extreme of the second function (for one value of the variable X, both extremes are reached) then Pareto-optimal front passes at one point (e.g., extremes 1 and 2 are identified) and the multi-objective optimization is one optimal solution only.
The goal of optimization is to find a non-dominant solution that requires the functions to be in contradiction (conflict). A change of variable
X for one function towards its required extreme value delays the second function from its required minimum/maximum. A more detailed description of multi-objective optimization by means of Pareto sets can be found in literature [
16] or [
17].
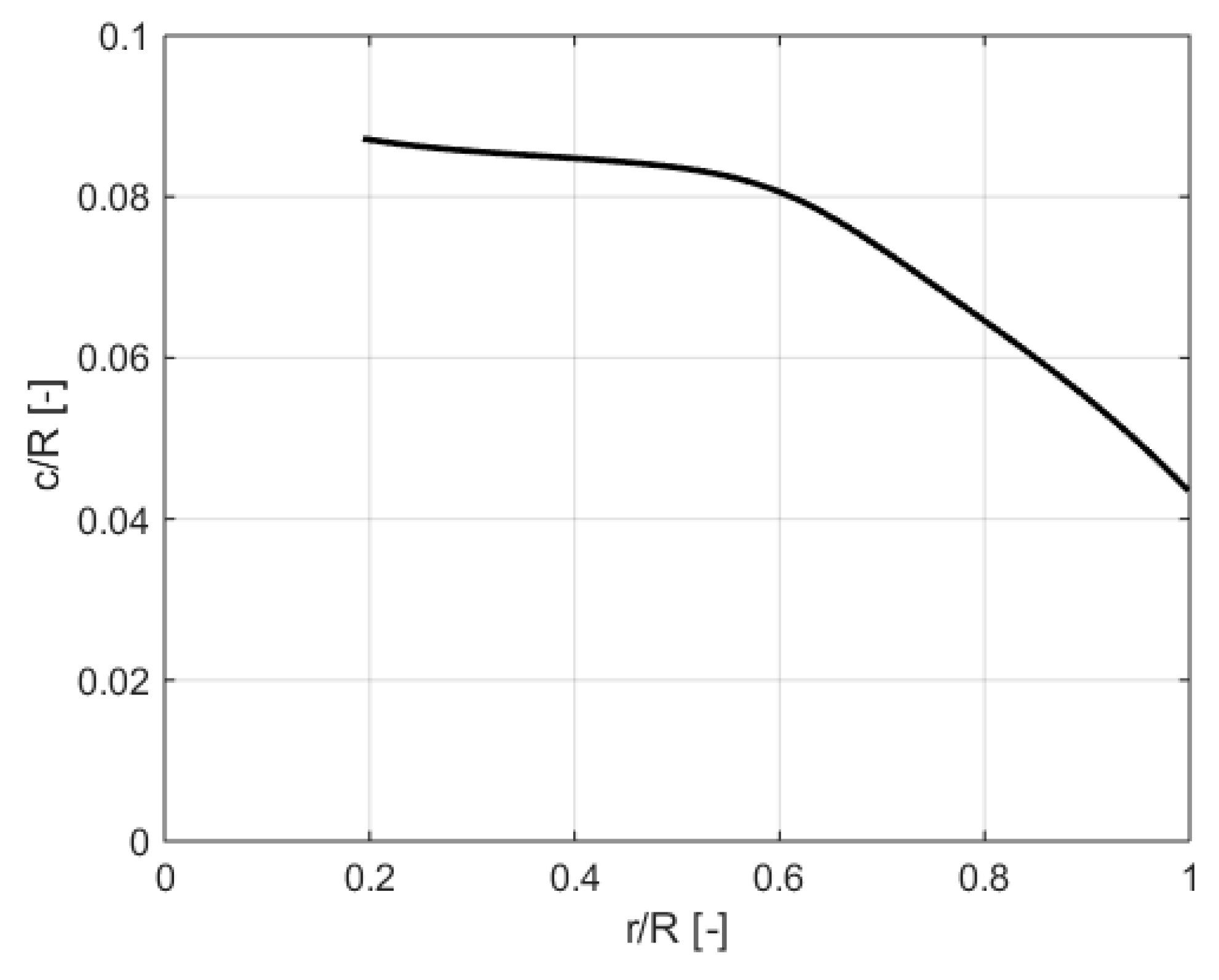
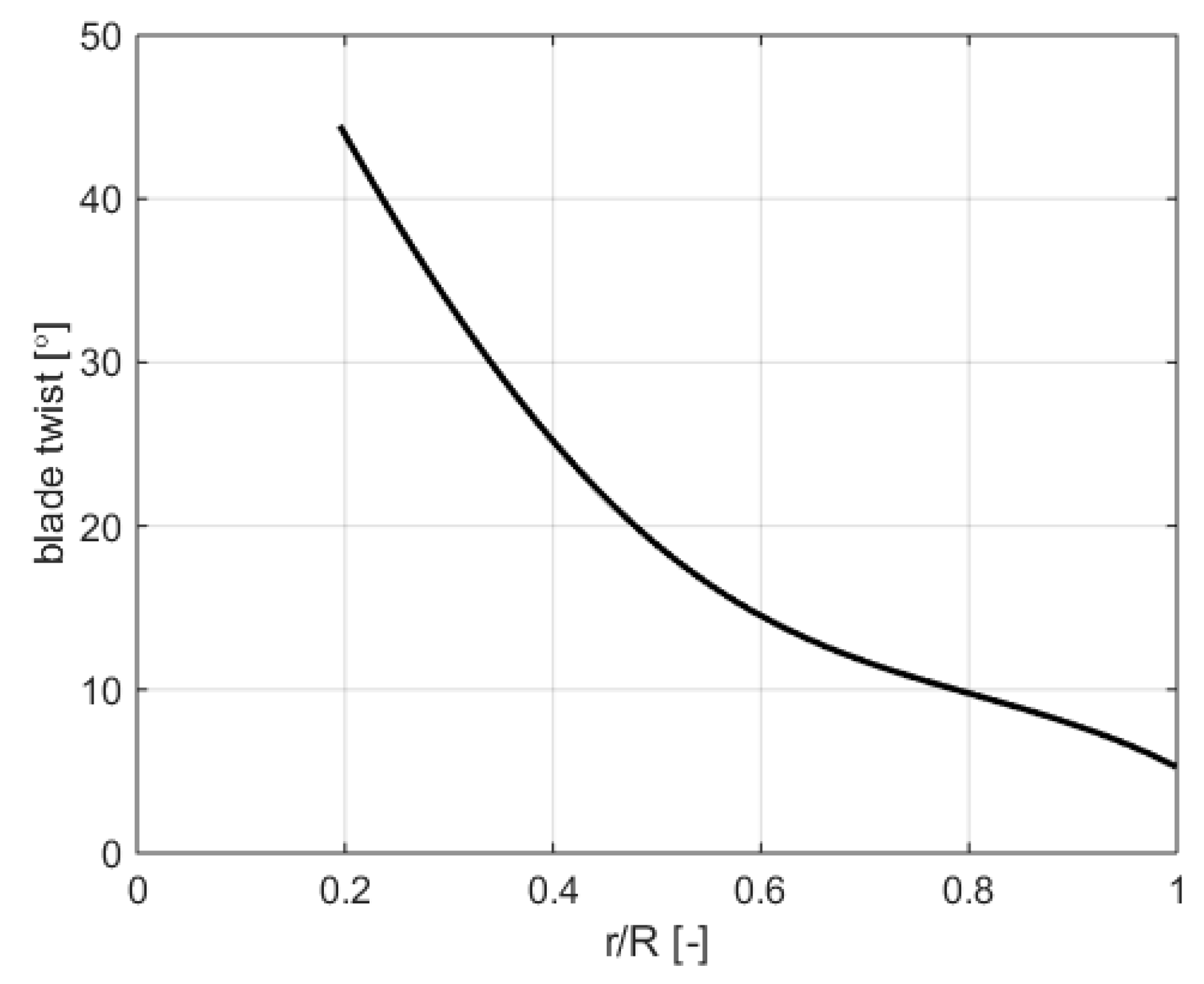
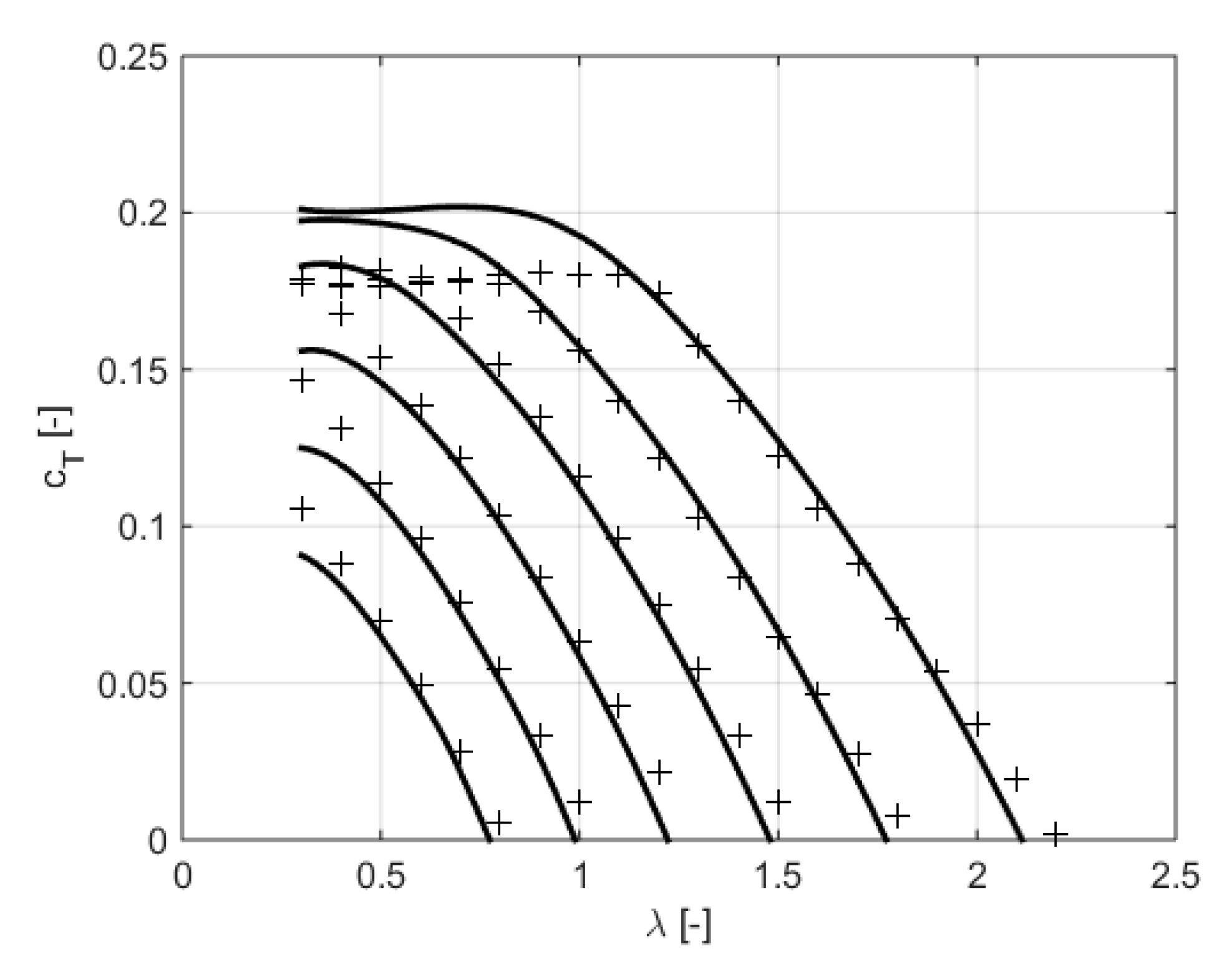
In the optimization selection of propellers from the family of propeller, the discrete points represent individual propellers. The propeller geometry comprises both continuously geometric parameters (mainly distribution of the chord length, twist and thickness of the airfoils used along the blade, the propeller diameter) and discrete parameter—the number of blades. The propeller aerodynamic characteristics represent the dependence of the thrust and power coefficients on the advance ratio (cT(λ), cP(λ)) that together with an engine power curve enables to set the available isolated thrust curve of the power unit.
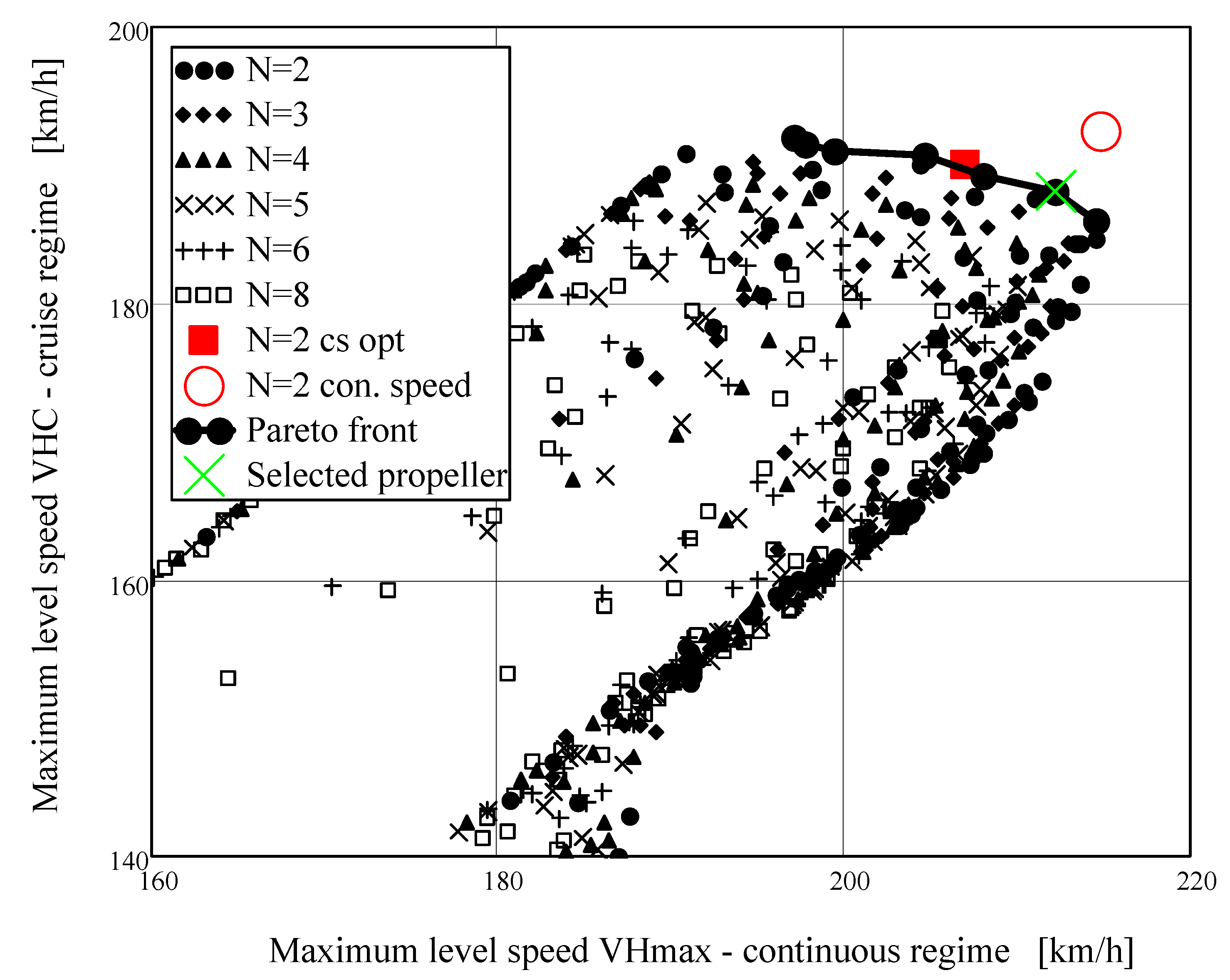
Pareto sets are composed from final number of points (equal to the number of propellers in the family of propeller) of appropriate pairs of the contradictory flight conditions objective functions: [maximum horizontal flight speed–take-off distance], [maximum horizontal flight speed–maximum rate of climb], [take-off distance–maximum rate of climb]. The pair of [maximum horizontal flight speed (continuous engine regime)–maximum horizontal flight speed (cruise regime)] is also included.
The optimization selection of the propeller by means of Pareto-optimal sets consists of the following sequential actions:
Assessment of free flight aerodynamic characteristics of the airplane (lift curve cL(α), lift-drag polar cL(cD) without the propeller influence on the airplane drag in the relevant flight configuration of the flight performance.
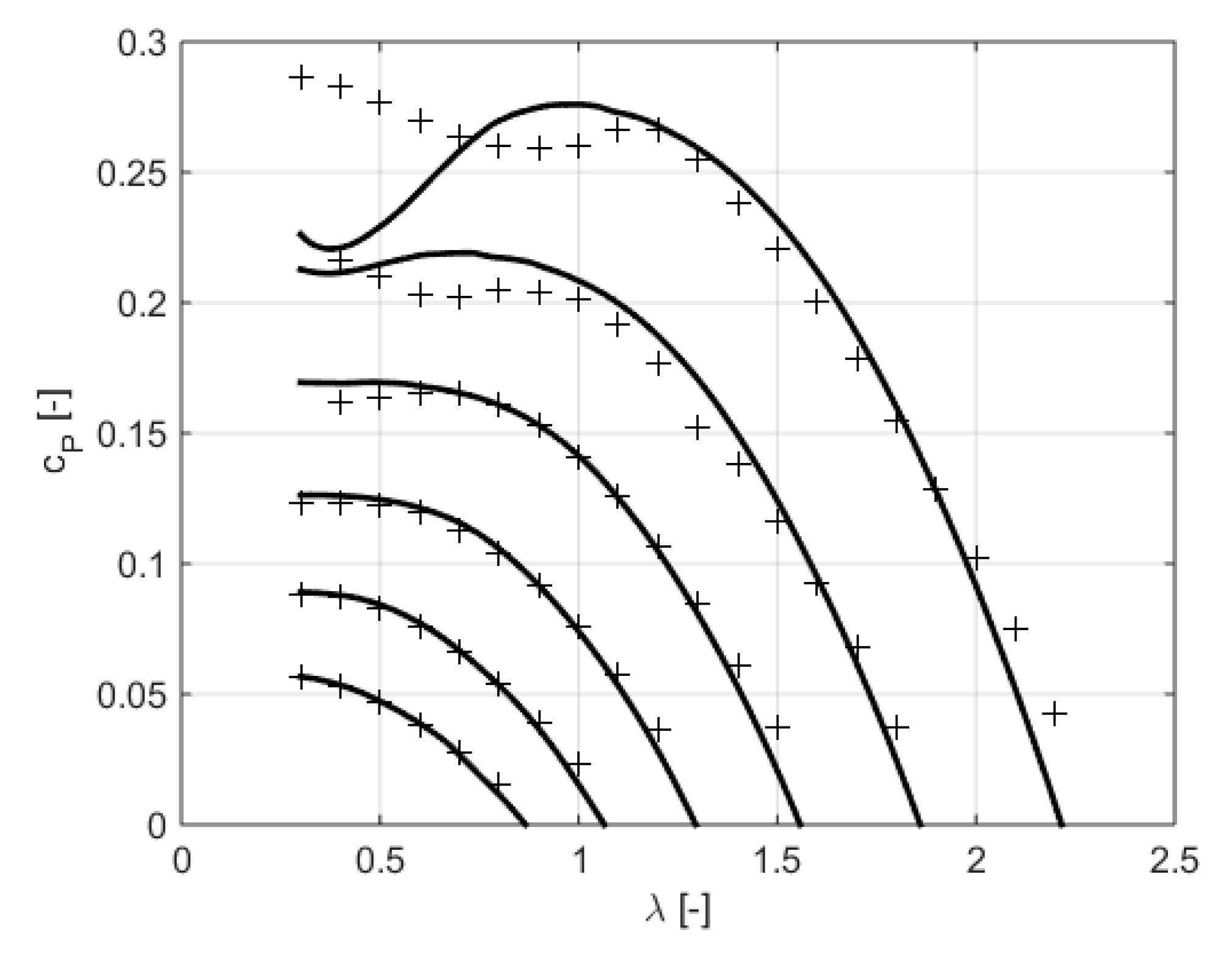
Determination of propeller aerodynamic characteristics—thrust and power coefficients cT(λ), cP(λ).
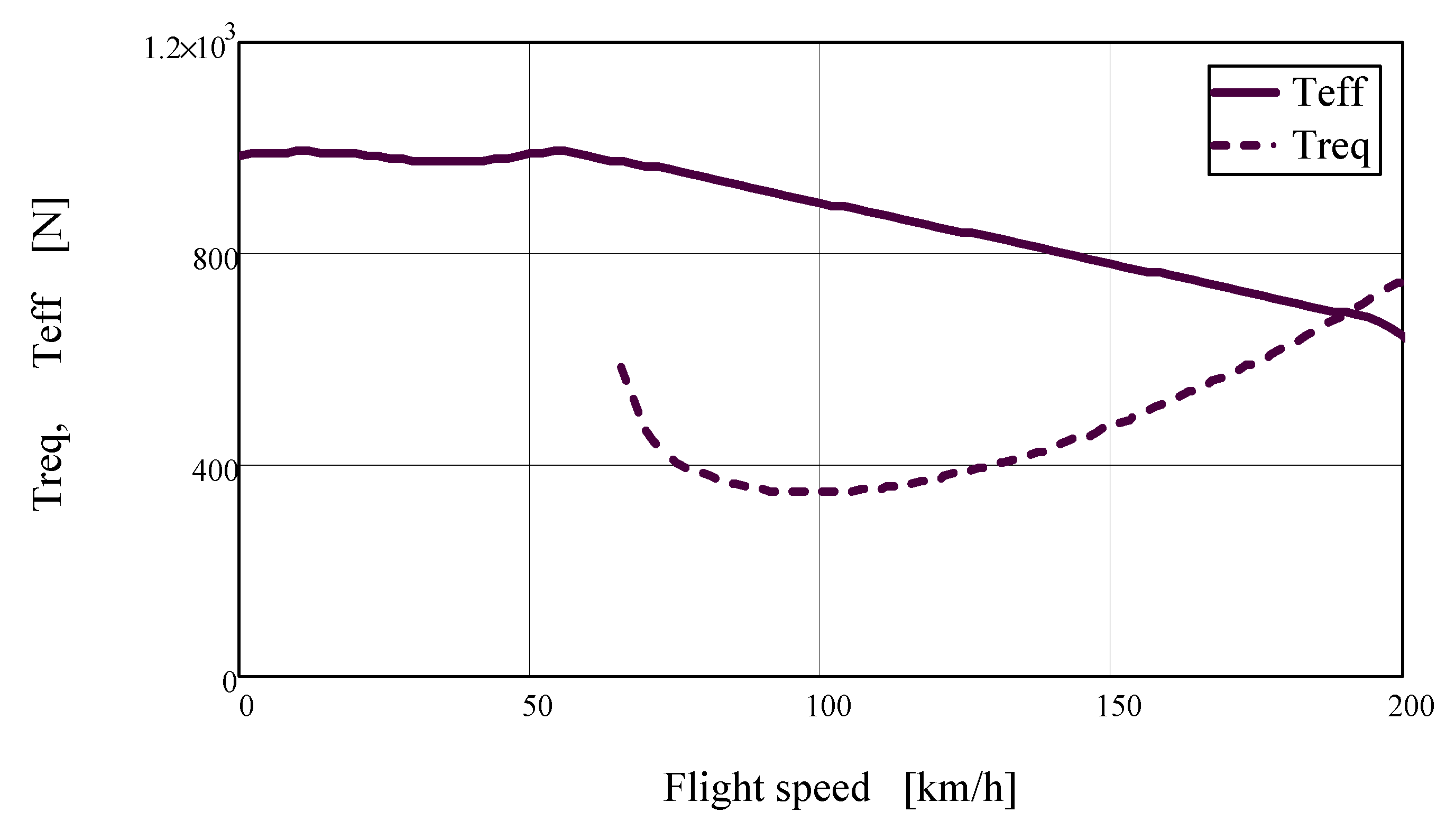
Calculation of the isolated thrust curve Tis(V) corresponding to the flight condition with the given engine regime, Tis(V) correction to the true T(V) and effective thrust Tef(V).
Calculation of all flight performance with the free airplane aerodynamic characteristics corrected for the respective ground effect of each flight condition.
Set up of the contradictory pairs of the flight conditions and creation of Pareto set graphs.
Evaluation of optimal Pareto fronts on Pareto sets graphs as the optimization selection.
3.2. Aerodynamic Characteristics of the Aeroplane
A model study of a small two-seat sport airplane with a requirement for a short take-off and landing (STOL) was chosen. The airplane is designed as the high-wing arrangement in which 13 m2 trapezoidal wing of the aspect ratio equals to 7.2. The wing is equipped with a combined high-lift device on the leading and trailing edge—a slotted leading edge (slat) and Fowler flap. The whole wing leading edge is equipped with slat; Fowler flap is installed on 60% of the wing trailing edge. Wing airfoil was developed from GA(W)-1 in order to increase lift coefficient. The airplane is drawn up with the standard side-by-side seat arrangement and a fixed taildragger landing gear with fairing.
Lift and drag aerodynamic characteristics were determined according to the methodology described in
Appendix B for the following flight lift device configuration:
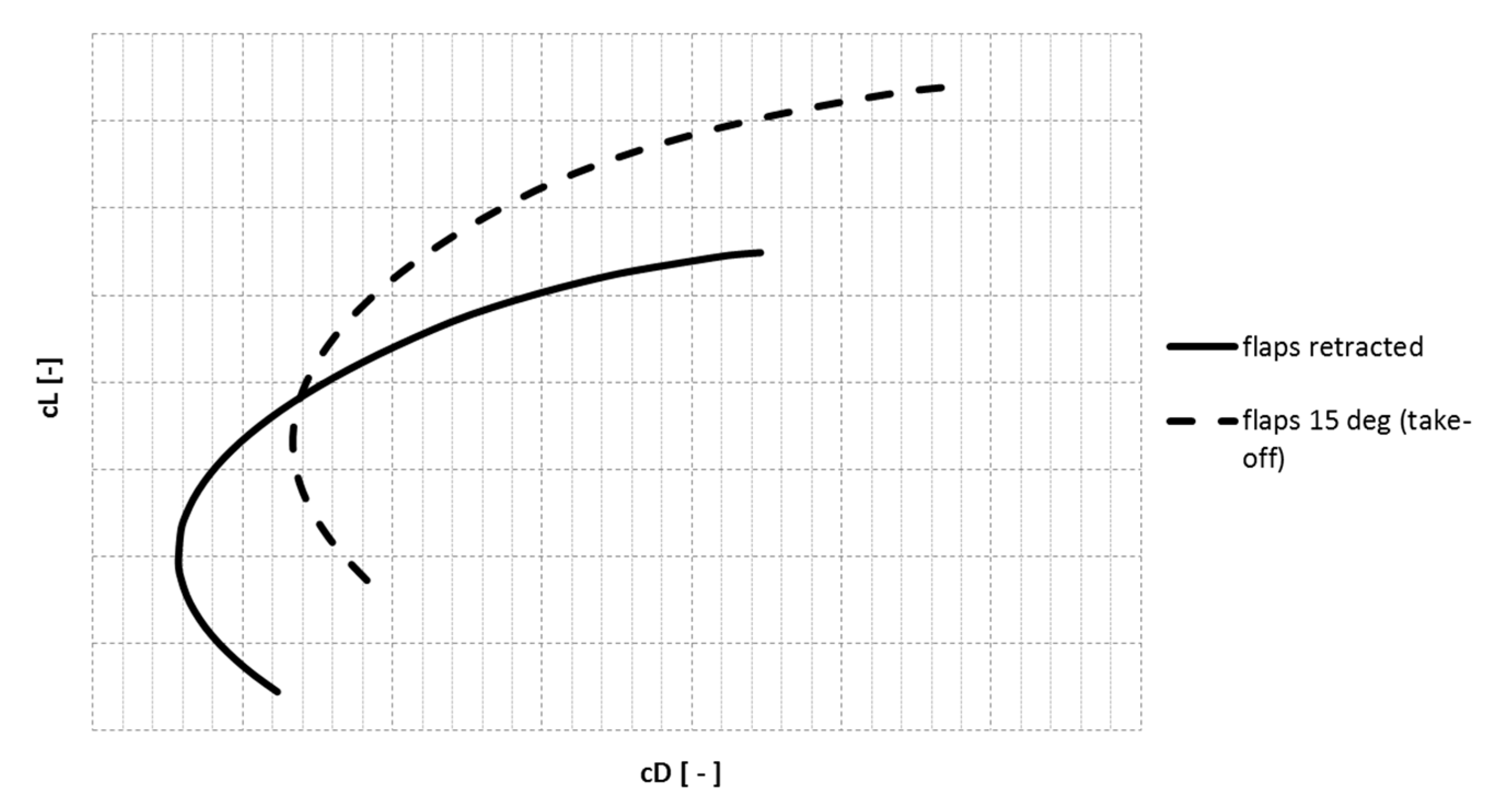
The primary characteristics are determined without the propeller influence on the aerodynamic drag of the airplane and without the ground effect (see
Figure 2). The characteristics correspond to moment-balanced states in the typical flight configuration. The primary lift and drag characteristics of take-off and landing configurations are corrected for the ground effect depending on the actual height above the ground. An additional airplane aerodynamic drag due to the propeller stream is included in the true propeller thrust.
3.6. Flight Performance for Pareto Sets
Aircraft performance is computed by methods described in [
6] and [
21]. More detailed explanation can be found in
Appendix B. Computation is performed for 0 meters international standard atmosphere (ISA), i.e., air pressure 101,325 Pa, air density 1.225 kg·m
−3 and air temperature 288.15 K (15 °C). Pareto sets require the pairing of such requirements, which are contradictory. The respective pairs of flight conditions required to achieve their extreme values (minimum, maximum) act on each other so that increasing one flight condition towards the extreme decreases the second flight condition from its desired extreme.
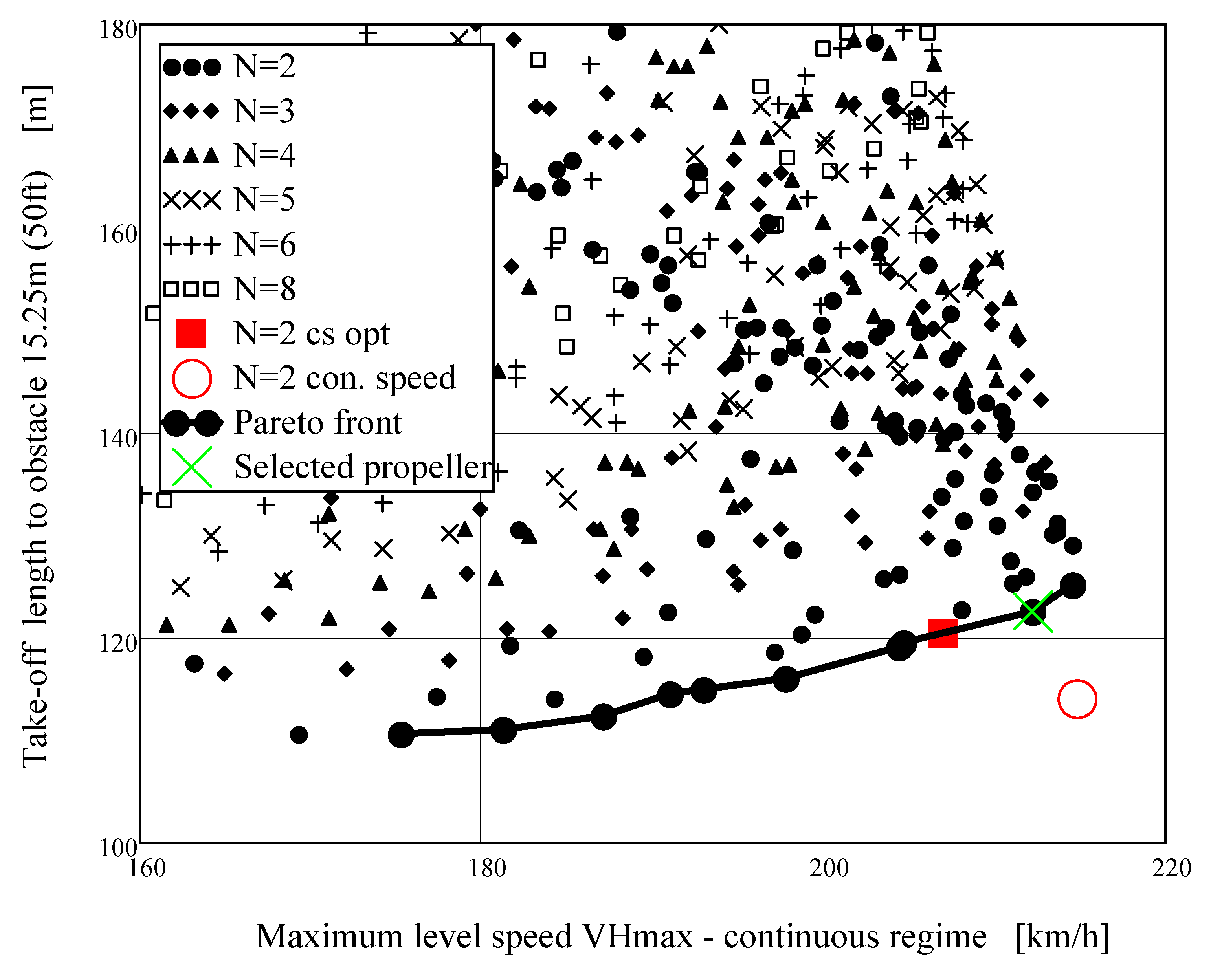
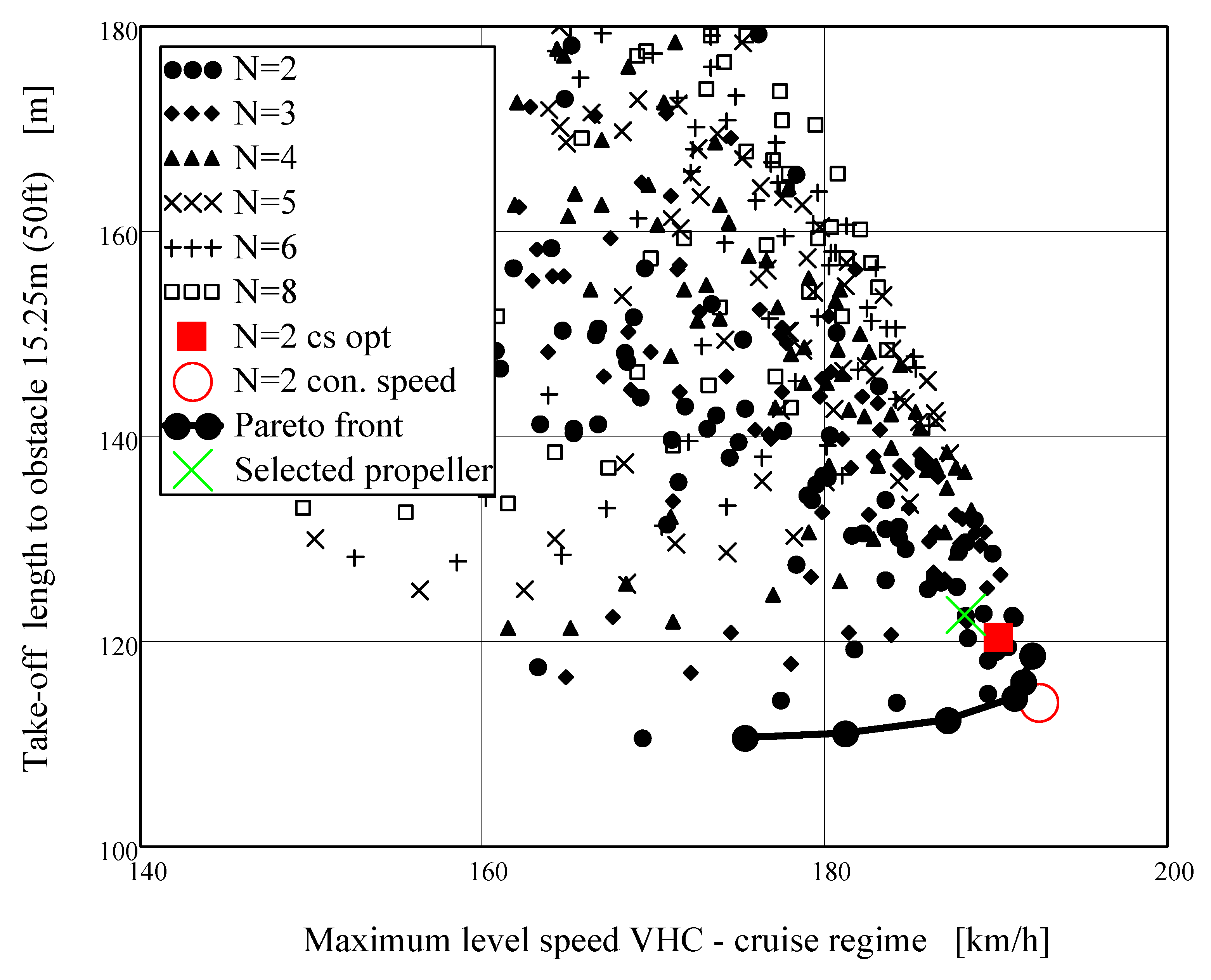
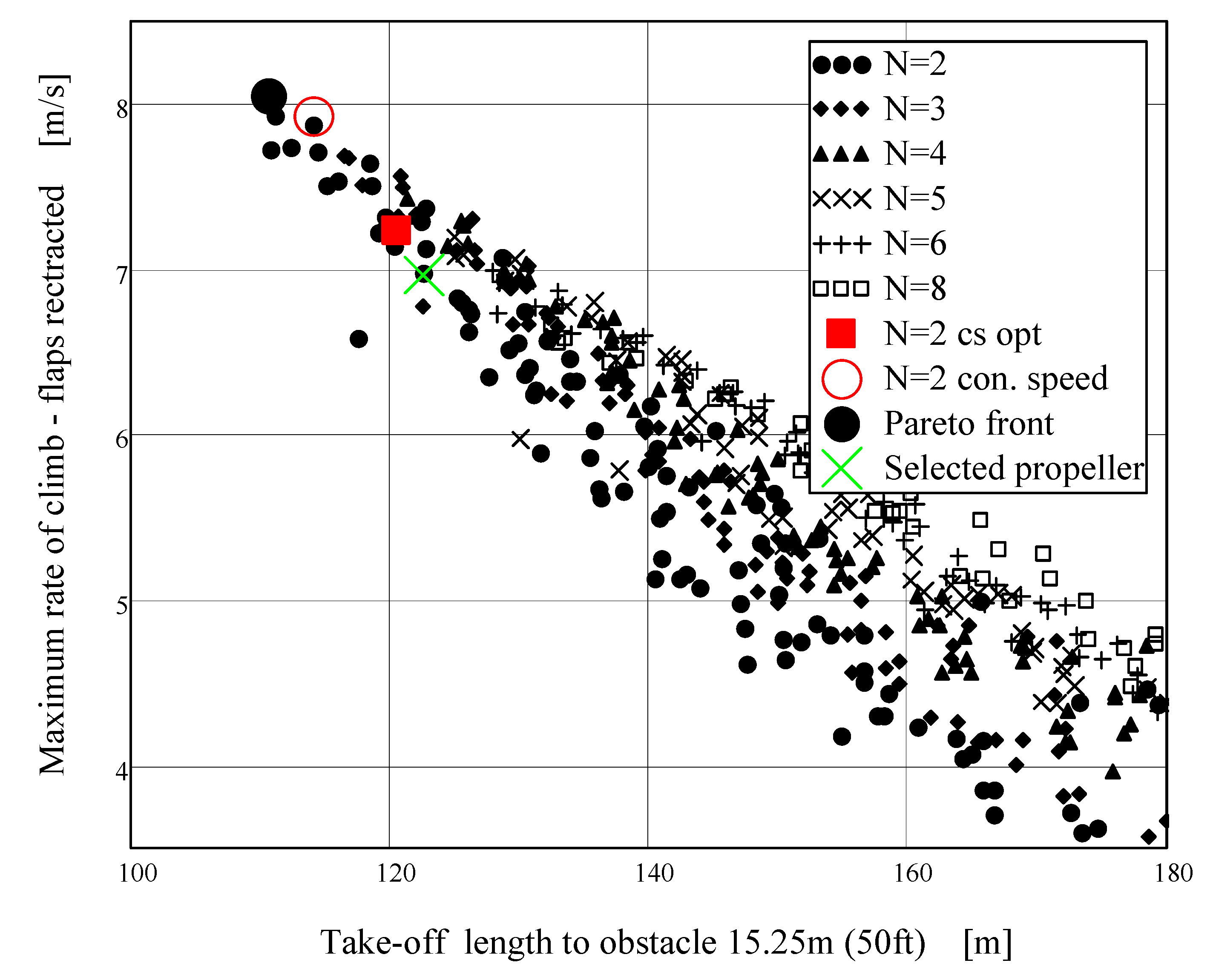
In general, it can be expected that the propellers with good take-off performance are not good for reaching maximum flight speeds and vice versa. Therefore, for pairs of the flight conditions for Pareto set, the following are used:
Maximum horizontal flight speed (continuous engine regime)–Take-off distance (take-off engine regime).
Maximum horizontal flight speed (cruise engine regime)–Take-off distance (take-off engine regime).
Maximum horizontal flight speed (continuous engine regime)–Maximum rate of climb (take-off engine regime).
Maximum horizontal flight speed (cruise engine regime)–Maximum rate of climb (take-off engine regime).
Take-off distance (take-off engine regime)–Maximum rate of climb (take-off engine regime).
Maximum horizontal flight speed (continuous engine regime)–maximum horizontal flight speed (cruise regime).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}