Modelling Flexibility and Qualification Ability to Assess Electric Propulsion Architectures for Satellite Megaconstellations



Abstract
:1. Introduction
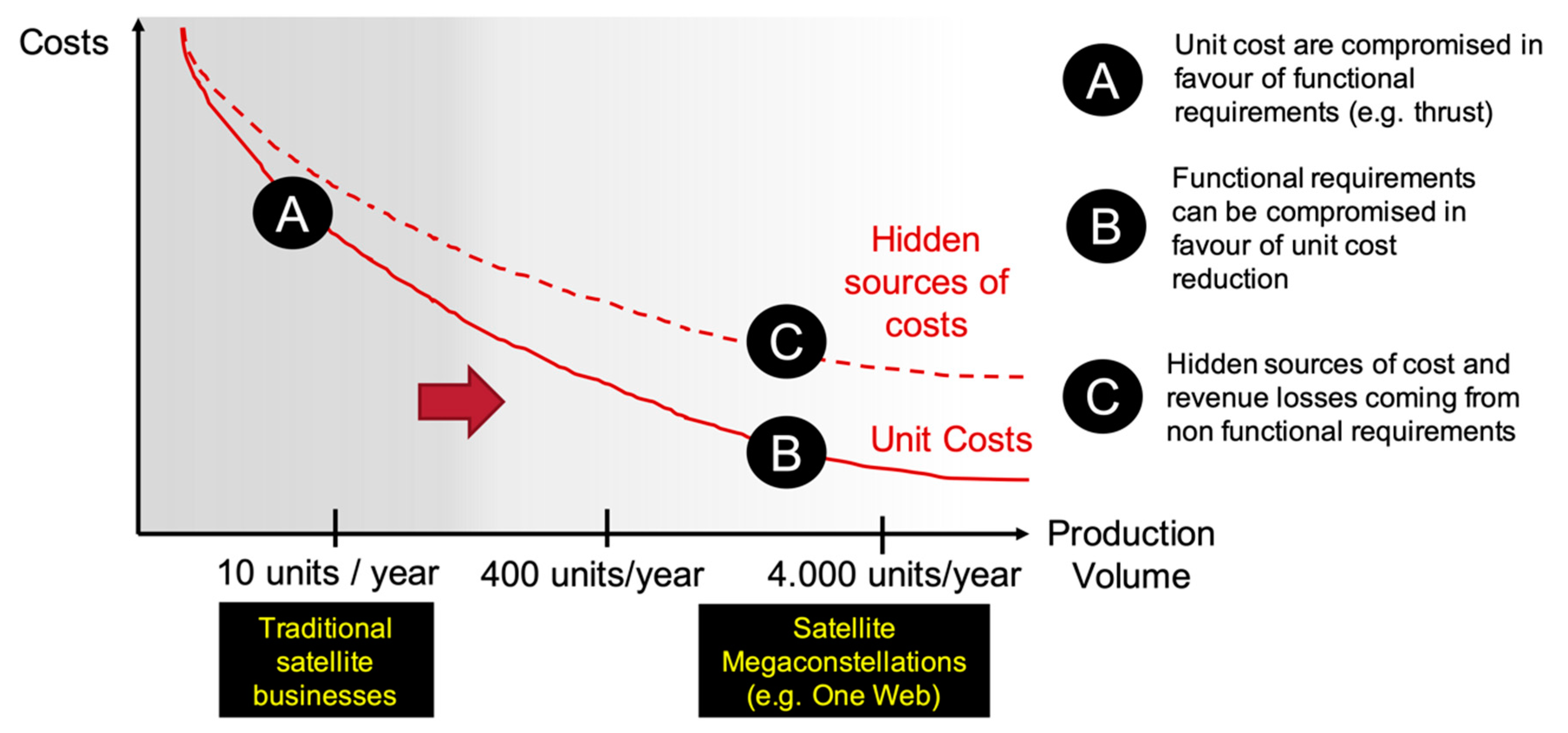
1.1. The Rising Importance of Including Non-Functional Requirements in Preliminary Design
1.2. Modelling Flexiblity in Preliminary Design Trade-Off Studies
1.3. Modelling Testing and Qualification Ability in Preliminary Design Trade-Off Studies
2. Materials and Methods
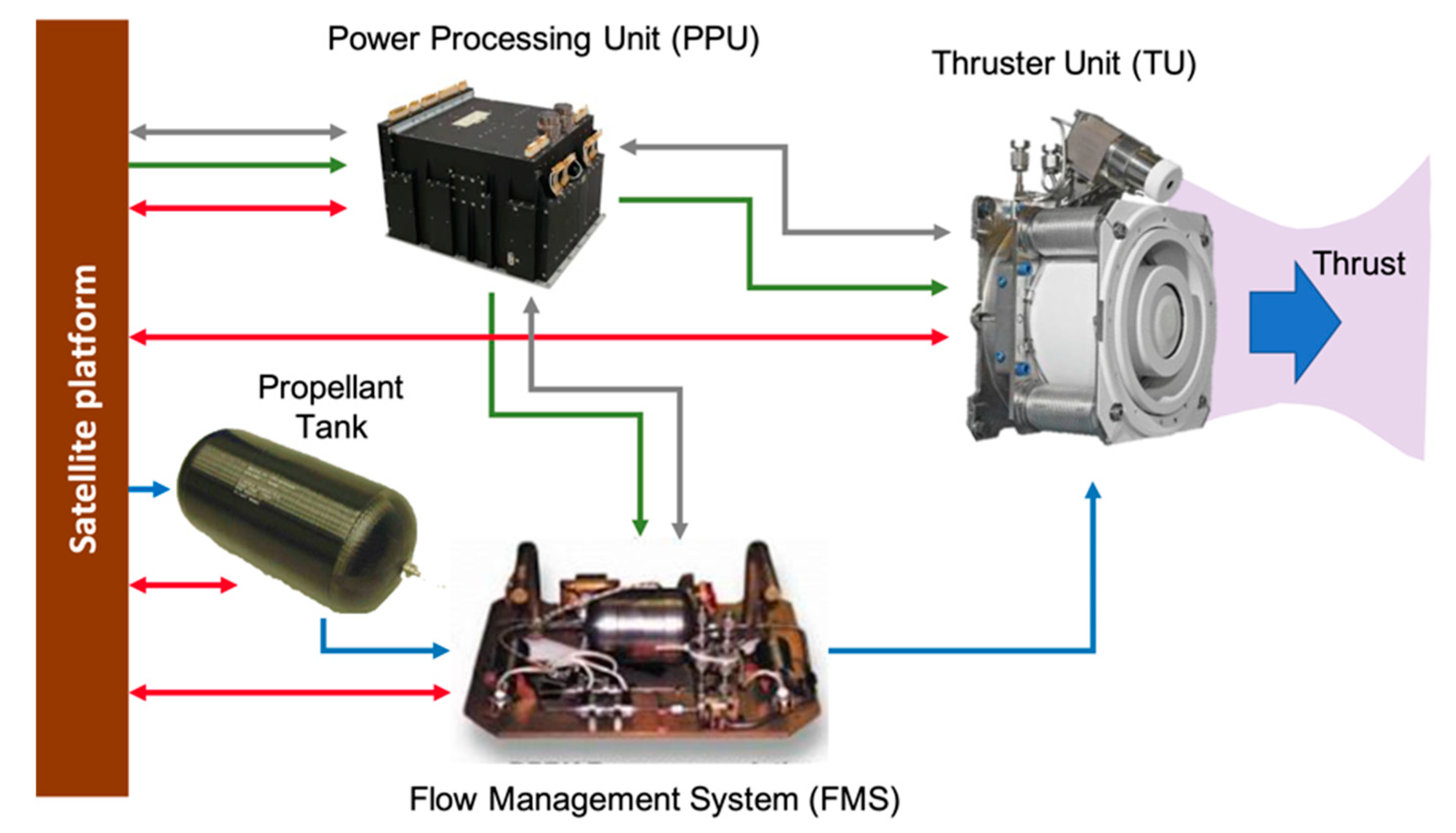
2.1. Research Context
- -
- The thruster unit (TU), which transforms electric energy and propellant into thrust,
- -
- The power processing unit (PPU), which feeds the thruster with electric power from the satellite bus and manages it,
- -
- The flow management system (FMS), which feeds the thruster with propellant from a propellant tank and manages it.
2.2. ‘New Space’ Market Conditions that Determine the Value of Next-Generation Satellite Propulsion Systems
3. Results
3.1. Identify Sources of Uncertainty and Generate Alternatives in Satellite Megaconstellation Scenarios
3.2. Develop Surplus Value Model
- and are multipliers on a single year’s revenue and costs based on the discount rate and mission life for the producers/manufacturers and customer (operator) respectively.
- Market size is the number of satellites sold every year.
- Revenue per year generated from satellite operations.
- SK costs refer to the ground operations necessary to manoeuvre the satellite during station keeping (SK).
- OR costs refer to the ground operations necessary to manoeuvre the satellite during orbit raising (OR).
- Propellant costs refer to cost of propellant used to propel the satellite during OR and SK.
- Launch costs refers to the costs incurred during launch.
- Satellite costs without EP refers to the cost sustained during the production and integration of the satellite.
- The total capital investment is the sum of Launch costs, Satellite costs without EP and EP product costs.
- Interest costs refers to the costs incurred by the interest on capital.
- Insurance costs refers to the costs incurred by the insurance paid for the satellite in orbit.
- Test and qualification costs refers to the development costs for satellite and EP. These costs derive from the test and qualification model that will be described in the next section. Often, these costs are also defined in the space sector as non-recurring costs.
3.3. Calculate Test and Qualification Costs through a Discrete-Event Qualification Model
3.4. Generate Market Scenarios and Run First Surplus Value Assessment
- Market 1: this market considers the case of a more ‘conservative’ megaconstellation with a relatively small number (300) of heavy satellites to be operated in “high-LEO” orbits (1500 km).
- Market 2: this market represents the case of a megaconstellation with high number (900) of medium-sized satellites that operate in “medium-LEO” orbits (1200 km).
- Market 3: this scenario features a more advanced business scenario in which a very high number (4000) of small satellites operate in “low-LEO” orbits (800 km). Also, this market features the case of more favorable conditions in terms of launch cost (e.g., considering the case of a cheaper launcher being developed) and a more aggressive launch strategy with a higher number of satellites that can fit in a single launch.
- Option 1 (single development xenon) presents highest surplus value and lowest LCC.
- The high test and qualification costs (i.e., non-recurring costs) involved in the development a high-performance and reliable krypton option (equal to a mature xenon option available today) does not overweight its benefits.
- Developing a flexible option (compatible with both xenon and krypton) in an efficient way (with lower test and qualification costs than a high-performance xenon and krypton option, Figure 6) does not overweight its benefits, due to the lower performance levels and lower reliability levels involved in this option.
- Increasing the reliability levels on the flexible option by adding a redundant thruster and TSU does not overcome its benefits, as additional costs and weight are introduced due to the addition of these new components. Also, the test and qualification are increased with this alternative, as the TSU needs to be developed, tested and qualified.
3.5. Introduce Uncertainty of Input Market Data in the Surplus Value Model
- The future prices of xenon and krypton. These parameters impact the cost of the propellant required to enter the operational orbit.
- The revenue that the operators will generate from megaconstellation businesses. This parameter impacts the benefit of higher thrust, as the operator can enter in operation earlier and thus start to generate revenues earlier. At the same time, this parameter also impacts the benefit of higher reliability, since there is less probability of losing the mission during operation.
- The cost of launch per kilogram. This parameter impacts the overall launch cost for the satellite constellations, which is a decisive factor to determine the impact of the wet mass of the EP.
3.6. Calculate Surplus Value of Alternatives, Visualize Results and Make Decisions
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Öhrwall Rönnbäck, A.B.; Isaksson, O. Product development challenges for space sub-system manufacturers. In Proceedings of the DESIGN 2018 15th International Design Conference, Dubrovnik, Croatia, 21–24 May 2018; pp. 1937–1944. [Google Scholar]
- Reid, T.G.; Neish, A.M.; Walter, T.F.; Enge, P.K. Leveraging commercial broadband LEO constellations for navigation. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, ON, USA, 12–16 September 2016. [Google Scholar]
- Alvarez, J.; Walls, B. Constellations, clusters, and communication technology: Expanding small satellite access to space. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–11. [Google Scholar]
- Golkar, A.; Cruz, I.L. The Federated Satellite Systems paradigm: Concept and business case evaluation. Acta Astronaut. 2015, 111, 230–248. [Google Scholar] [CrossRef]
- Kishi, N. Management analysis for the space industry. Space Policy 2017, 39, 1–6. [Google Scholar] [CrossRef]
- Malyy, M.; Tekic, Z.; Golkar, A. What Drives Technology Innovation in New Space? A Preliminary Analysis of Venture Capital Investments in Earth Observation Start-Ups. IEEE Geosci. Remote Sens. Mag. 2019, 7, 59–73. [Google Scholar] [CrossRef]
- Köchel, S.; Langer, M. New Space: Impacts of Innovative Concepts in Satellite Development on the Space Industry. In Proceedings of the 69th International Astronautical Congress, Bremen, Germany, 1–5 October 2018. [Google Scholar]
- Curzi, G.; Modenini, D.; Tortora, P. Large Constellations of Small Satellites: A Survey of Near Future Challenges and Missions. Aerospace 2020, 7, 133. [Google Scholar] [CrossRef]
- Pahl, G.; Beitz, W. Engineering Design: A Systematic Approach; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Worinkeng, E.; Joshi, S.; Summers, J.D. An experimental study: Analyzing requirement type influence on novelty and variety of generated solutions. Int. J. Des. Creat. Innov. 2015, 3, 61–77. [Google Scholar] [CrossRef]
- Ebert, C. Dealing with nonfunctional requirements in large software systems. Ann. Softw. Eng. 1997, 3, 367–395. [Google Scholar] [CrossRef]
- Raudberget, D.; Levandowski, C.; Isaksson, O.; Kipouros, T.; Johannesson, H.; Clarkson, J. Modelling and assessing platform architectures in pre-embodiment phases through set-based evaluation and change propagation. J. Aerosp. Oper. 2015, 3, 203–221. [Google Scholar] [CrossRef]
- Ross, A.M.; Rhodes, D.H.; Hastings, D.E. Defining changeability: Reconciling flexibility, adaptability, scalability, modifiability, and robustness for maintaining system lifecycle value. Syst. Eng. 2008, 11, 246–262. [Google Scholar] [CrossRef] [Green Version]
- Collopy, P.D. A System for Values, Communication and Leadership in Product Design. In Proceedings of the International Powered Lift, Conference Proceedings, Jupiter, FL, USA, 18–20 November 1997; pp. 95–98. [Google Scholar]
- Brown, O.C.; Eremenko, P.; Collopy, P.D. Value-centric design methodologies for fractionated spacecraft: Progress summary from phase 1 of the DARPA System F6 program. In Proceedings of the AIAA SPACE 2009 Conference & Exposition, Pasadena, CA, USA, 14−17 September 2009. [Google Scholar] [CrossRef] [Green Version]
- Panarotto, M. A Model-Based Methodology for Value Assessment in Conceptual Design. Ph.D. Thesis, Blekinge Institute of Technology, Karlskrona, Sweden, 2015. [Google Scholar]
- Panarotto, M.; Wall, J.; Bertoni, M.; Larsson, T.; Jonsson, P. Value-driven simulation: Thinking together through simulation in early engineering design. In Proceedings of the 21st International Conference on Engineering Design (ICED), Vancouver, BC, Canada, 21–25 August 2017. [Google Scholar]
- Huber, G.P. Multi-attribute utility models: A review of field and field-like studies. Manag. Sci. 1974, 20, 1393–1402. [Google Scholar] [CrossRef]
- Collopy, P.D.; Hollingsworth, P.M. Value-Driven Design. J. Aircr. 2011, 48, 749–759. [Google Scholar] [CrossRef]
- Vanhoucke, M.; Demeulemeester, E.; Herroelen, W. On maximizing the net present value of a project under renewable resource constraints. Manag. Sci. 2001, 47, 1113–1121. [Google Scholar] [CrossRef]
- Jugulum, R.; Frey, D.D. Toward a taxonomy of concept designs for improved robustness. J. Eng. Des. 2007, 18, 139–156. [Google Scholar] [CrossRef]
- Cardin, M.A. Enabling flexibility in engineering systems: A taxonomy of procedures and a design framework. J. Mech. Des. 2014, 136. [Google Scholar] [CrossRef] [Green Version]
- De Neufville, R.; Scholtes, S. Flexibility in Engineering Design; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Huchzermeier, A.; Loch, C.H. Project management under risk: Using the real options approach to evaluate flexibility in R… D. Manag. Sci. 2001, 47, 85–101. [Google Scholar] [CrossRef]
- De Weck, O.; de Neufville, R.; Chaize, M. Enhancing the economics of communication satellites via orbital reconfigurations and staged deployment. In Proceedings of the AIAA Space 2003 Conference & Exposition, Long Beach, CA, USA, 23−25 September 2003; p. 6317. [Google Scholar]
- Kamrad, B.; Schmidt, G.M.; Ülkü, S. Analyzing product architecture under technological change: Modular upgradeability tradeoffs. IEEE Trans. Eng. Manag. 2013, 60, 289–300. [Google Scholar] [CrossRef]
- Viscito, L.; Ross, A. Quantifying flexibility in tradespace exploration: Value-weighted filtered outdegree. In Proceedings of the AIAA SPACE 2009 Conference & Exposition, Pasadena, CA, USA, 14−17 September 2009; p. 6561. [Google Scholar]
- Tahera, K.; Earl, C. Testing and PLM: Connecting Process and Product Models in Product Development. In Product Lifecycle Management-Terminology and Applications; IntechOpen: London, UK, 2018. [Google Scholar]
- ISO. ISO/IEC 12207:2008 [ISO/IEC 12207:2008]. Systems and Software Engineering—Software Life Cycle Processes ISO/IEC 12207:2008. 2008. Available online: https://www.iso.org/standard/43447.html (accessed on 5 September 2020).
- Shabi, J.; Reich, Y.; Diamant, R. Planning the verification, validation, and testing process: A case study demonstrating a decision support model. J. Eng. Des. 2017, 28, 171–204. [Google Scholar] [CrossRef]
- ISO. ISO/IEC/IEEE 15288:2015. Systems and Software Engineering—System Life Cycle Processes. 2015. Available online: https://www.iso.org/standard/63711.html (accessed on 5 September 2020).
- Engel, A.; Barad, M. A methodology for modeling VVT risks and costs. Syst. Eng. 2003, 6, 135–151. [Google Scholar] [CrossRef]
- Browning, T.R.; Eppinger, S.D. Modeling impacts of process architecture on cost and schedule risk in product development. IEEE Trans. Eng. Manag. 2002, 49, 428–442. [Google Scholar] [CrossRef] [Green Version]
- Ben-Arieh, D.; Qian, L. Activity-based cost management for design and development stage. Int. J. Prod. Econ. 2003, 83, 169–183. [Google Scholar] [CrossRef]
- Tahera, K.; Wynn, D.C.; Earl, C.; Eckert, C.M. Testing in the incremental design and development of complex products. Res. Eng. Des. 2019, 30, 291–316. [Google Scholar] [CrossRef] [Green Version]
- Taccogna, F.; Garrigues, L. Latest Progress in Hall Thrusters Plasma Modelling. Rev. Mod. Plasma Phys. 2019, 3, 12. [Google Scholar] [CrossRef]
- Mazouffre, S. Electric propulsion for satellites and spacecraft: Established technologies and novel approaches. Plasma Sources Sci. Technol. 2016, 25, 033002. [Google Scholar] [CrossRef]
- Lev, D.R.; Mikellides, I.G.; Pedrini, D.; Goebel, D.M.; Jorns, B.A.; McDonald, M.S. Recent progress in research and development of hollow cathodes for electric propulsion. Rev. Mod. Plasma Phys. 2019, 3, 6. [Google Scholar] [CrossRef]
- Lorand, A.; Duchemin, O.; Cornu, N. Next Generation of Thruster Module Assembly. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]
- Massey, R.; Lucatello, S.; Benvenuti, P. The challenge of satellite megaconstellations. Nat. Astron. 2020, 4, 1022–1023. [Google Scholar] [CrossRef]
- OneWeb Satellite Constellation. In Wikipedia. Available online: https://en.wikipedia.org/wiki/OneWeb_satellite_constellation (accessed on 10 November 2020).
- Starlink. In Wikipedia. Available online: https://en.wikipedia.org/wiki/Starlink (accessed on 10 November 2020).
- SpaceNews. Telesat Preparing for Mid-2020 Constellation Manufacturer Selection. 2020. Available online: https://spacenews.com/telesat-preparing-for-mid-2020-constellation-manufacturer-selection/ (accessed on 10 November 2020).
- Geospatial World. How Many Satellites Orbit Earth and Why Space Traffic Management is Crucial. 2020. Available online: https://www.geospatialworld.net/blogs/how-many-satellites-orbit-earth-and-why-space-traffic-management-is-crucial/ (accessed on 10 November 2020).
- SpaceNews. Telesat Says Ideal LEO Constellation is 292 Satellites, But Could Be 512. 2020. Available online: https://spacenews.com/telesat-says-ideal-leo-constellation-is-292-satellites-but-could-be-512/ (accessed on 10 November 2020).
- OneWeb. 2020. Available online: https://www.oneweb.world/media-center/oneweb-files-for-chapter-11-restructuring-to-execute-sale-process (accessed on 5 April 2020).
- Goebel, D.M.; Katz, I. Fundamentals of Electric Propulsion: Ion and Hall Thrusters; John Wiley & Sons: Hoboken, NJ, USA, 2008; Volume 1. [Google Scholar]
- Hofer, R.R.; Randolph, T.M. Mass and cost model for selecting thruster size in electric propulsion systems. J. Propuls. Power 2012, 29, 166–177. [Google Scholar] [CrossRef]
- Castet, J.F.; Saleh, J.H. Satellite and satellite subsystems reliability: Statistical data analysis and modeling. Reliab. Eng. Syst. Saf. 2009, 94, 1718–1728. [Google Scholar] [CrossRef]
- Croes, V.; Tavant, A.; Lucken, R.; Martorelli, R.; Lafleur, T.; Bourdon, A.; Chabert, P. The effect of alternative propellants on the electron drift instability in Hall-effect thrusters: Insight from 2D particle-in-cell simulations. Phys. Plasmas 2018, 25, 063522. [Google Scholar] [CrossRef]
- Dragnea, H.C.; Ortega, A.L.; Kamhawi, H.; Boyd, I.D. Simulation of a Hall Effect Thruster Using Krypton Propellant. J. Propuls. Power 2020, 36, 335–345. [Google Scholar] [CrossRef]
- Andreussi, T.; Giannetti, V.; Leporini, A.; Ducci, C.; Estublier, D.; Edwards, C.; Rossodivita, A.; Andrenucci, M. Temporal evolution of the performance and channel erosion of a 5 kW-class Hall effect thruster operating with alternative propellants. In Proceedings of the 5th Space Propulsion Conference, Rome, Italy, 2–6 May 2016. [Google Scholar]
- Lev, D.; Misuri, T.; Albertoni, R.; Ducci, C.; Waldvogel, B.; Appel, L.; Eytan, R.; Dannemayer, K.; Di Cara, D. MEPS: A low power electric propulsion system for small satellites. In Proceedings of the 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, 20–24 April 2015; pp. 20–24. [Google Scholar]
- Robinson, S. Simulation: The Practice of Model Development and Use; Wiley: Chichester, UK, 2004; Volume 50. [Google Scholar]
- Wu, C.L. Airline Operations and Delay Management: Insights from Airline Economics, Networks and Strategic Schedule Planning; Routledge: Abingdon-on-Thames, UK, 2016. [Google Scholar]
- Rovey, J.L.; Lyne, C.T.; Mundahl, A.J.; Rasmont, N.; Glascock, M.S.; Wainwright, M.J.; Berg, S.P. Review of multimode space propulsion. Prog. Aerosp. Sci. 2020, 118, 100627. [Google Scholar] [CrossRef]
- Panarotto, M.; Isaksson, O.; Habbassi, I.; Cornu, N. Value-Based Development Connecting Engineering and Business: A Case on Electric Space Propulsion. IEEE Trans. Eng. Manag. 2020. [Google Scholar] [CrossRef]
- Bertoni, M.; Bertoni, A.; Eres, M.H. Value Driven Design Revisited: Emerging Modelling Concepts and Applications. In Proceedings of the Design Society: International Conference on Engineering Design, Delft, The Netherlands, 5–8 August 2019; Cambridge University Press: Cambridge, UK, 2019; Volume 1, pp. 2407–2416. [Google Scholar]
- Soban, D.S.; Price, M.A.; Hollingsworth, P. Defining a research agenda in Value Driven Design: Questions that need to be asked. J. Aerosp. Oper. 2012, 1, 329–342. [Google Scholar] [CrossRef]
- Cantoni, M.; Marseguerra, M.; Zio, E. Genetic algorithms and Monte Carlo simulation for optimal plant design. Reliab. Eng. Syst. Saf. 2000, 68, 29–38. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Market 1 | Market 2 | Market 3 |
|---|---|---|---|
| Final Orbit (km) | 1500 | 1200 | 800 |
| Constellation Size (Number of Satellites) | 300 | 900 | 4000 |
| Min Constellation Size (Number of Satellites) | 100 | 300 | 500 |
| Number of Satellites per Launch | 20 | 40 | 60 |
| Cost Xenon (k€/kg) | 3 | 3 | 3 |
| Cost Krypton (k€/kg) | 0.5 | 0.5 | 0.5 |
| Satellite Mass without EP (kg) | 800 | 600 | 400 |
| Launch Cost per Kilo (k€/kg) | 4 | 3 | 1.9 |
| Market 1 (0–5 Years) | Market 2 (5–10 Years) | Market 3 (10–15 Years) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Opt 1 | Opt 2 | Opt 3 | Opt 4 | Opt 1 | Opt 2 | Opt 3 | Opt 4 | Opt 1 | Opt 2 | Opt 3 | Opt 4 | |
| Number xenon | 500 | 500 | 438 | 269 | 494 | 494 | 325 | 48 | 164 | 164 | 112 | 0 |
| Number krypton | 0 | 0 | 62 | 231 | 0 (6) | 6 | 175 | 452 | 0 (336) | 336 | 388 | 500 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Panarotto, M.; Borgue, O.; Isaksson, O. Modelling Flexibility and Qualification Ability to Assess Electric Propulsion Architectures for Satellite Megaconstellations. Aerospace 2020, 7, 176. https://doi.org/10.3390/aerospace7120176
Panarotto M, Borgue O, Isaksson O. Modelling Flexibility and Qualification Ability to Assess Electric Propulsion Architectures for Satellite Megaconstellations. Aerospace. 2020; 7(12):176. https://doi.org/10.3390/aerospace7120176
Chicago/Turabian StylePanarotto, Massimo, Olivia Borgue, and Ola Isaksson. 2020. "Modelling Flexibility and Qualification Ability to Assess Electric Propulsion Architectures for Satellite Megaconstellations" Aerospace 7, no. 12: 176. https://doi.org/10.3390/aerospace7120176