Dot Product Equality Constrained Attitude Determination from Two Vector Observations: Theory and Astronautical Applications


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Fomulation
3. Proposed Theory
3.1. Dot Product-Equality Constraint
3.2. Quaternion Solution
3.3. Error and Covariance Anlysis
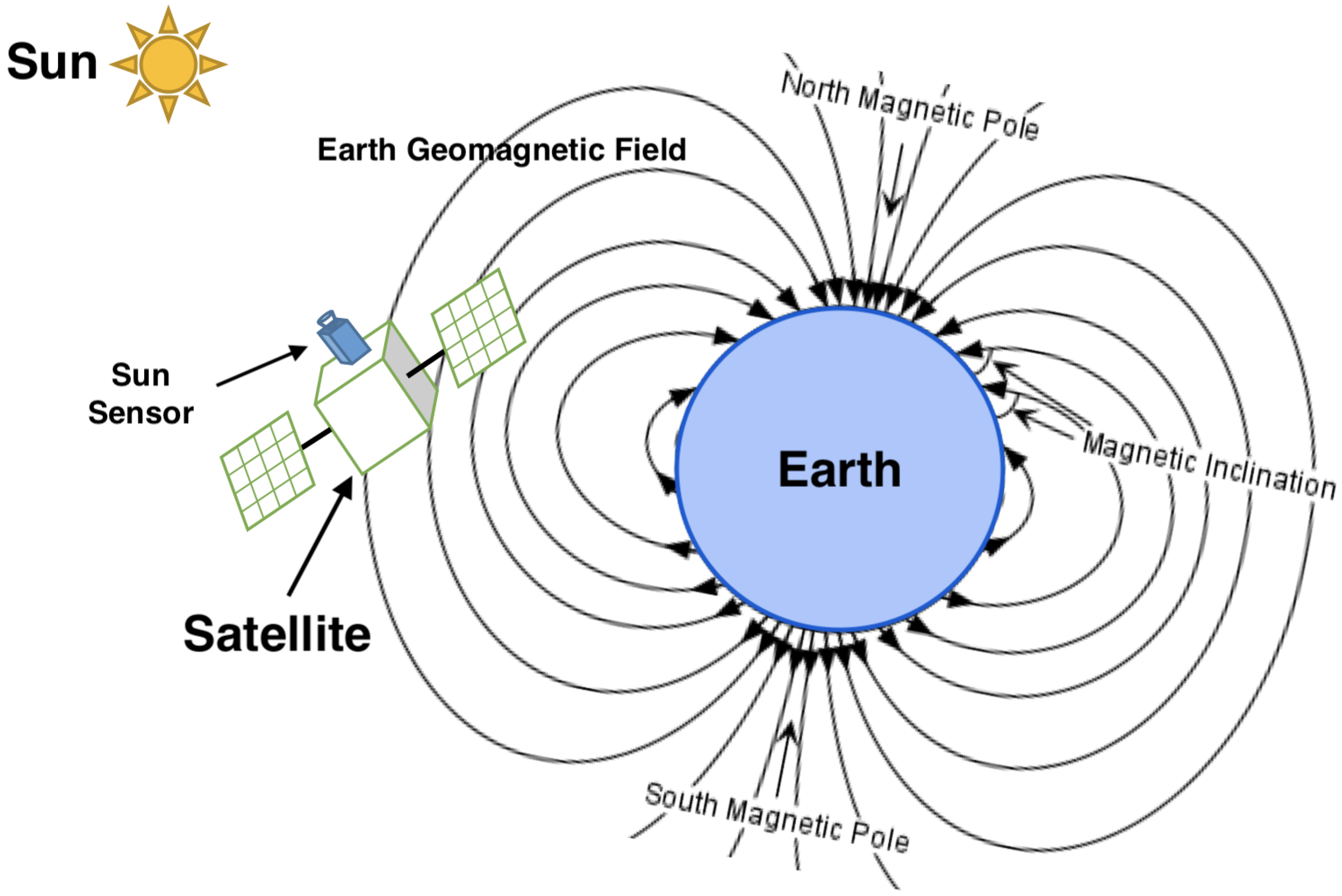
4. Applications: Attitude Determination from Horizon Sensor and Another Generalized Sensor
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gui, H.; Jin, L.; Xu, S. Attitude maneuver control of a two-wheeled spacecraft with bounded wheel speeds. Acta Astronaut. 2013, 88, 98–107. [Google Scholar] [CrossRef]
- Mortari, D.; Singla, P. Optimal cones intersection technique. Acta Astronaut. 2006, 59, 474–482. [Google Scholar] [CrossRef]
- de Ruiter, A.H.J.; Tran, L.; Kumar, B.S.; Muntyanov, A. Sun Vector–Based Attitude Determination of Passively Magnetically Stabilized Spacecraft. AIAA J. Guid. Control Dyn. 2016, 39, 1551–1562. [Google Scholar] [CrossRef]
- Mumtaz, R.; Palmer, P. Attitude determination by exploiting geometric distortions in stereo images of DMC camera. IEEE Trans. Aerosp. Elec. Syst. 2013, 49, 1601–1625. [Google Scholar] [CrossRef]
- Pham, M.D.; Low, K.S.; Goh, S.T.; Chen, S. Gain-Scheduled Extended Kalman Filter for Nanosatellite Attitude Determination System. IEEE Trans. Aerosp. Elec. Syst. 2015, 51, 1017–1028. [Google Scholar] [CrossRef]
- Saez, A.B.; Quero, J.M.; Jerez, M.A. Earth Sensor Based on Thermopile Detectors for Satellite Attitude Determination. IEEE Sensors J. 2016, 16, 2260–2271. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; Pflimlin, J.M. Nonlinear complementary filters on the special orthogonal group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef]
- Wang, M.; Tayebi, A. Hybrid Pose and Velocity-bias Estimation on SE(3) Using Inertial and Landmark Measurements. IEEE Trans. Autom. Control 2018, 64, 3399–3406. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, Y.; Liu, J.; Li, G. Equality constrained robust measurement fusion for adaptive kalman-filter-based heterogeneous multi-sensor navigation. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2146–2157. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, Y.; Zhang, J.; Rizos, C. Integrated Navigation System for a Low-Cost Quadrotor Aerial Vehicle in the Presence of Rotor Influences. J. Survey. Eng. 2017, 143, 05016006. [Google Scholar] [CrossRef]
- Wahba, G. A Least Squares Estimate of Satellite Attitude. SIAM Rev. 1965, 7, 409. [Google Scholar] [CrossRef]
- Shuster, M.D.; Oh, S.D. Three-axis attitude determination from vector observations. AIAA J. Guid. Control Dyn. 1981, 4, 70–77. [Google Scholar] [CrossRef]
- Markley, F.L. Attitude Determination using Vector Observations and the Singular Value Decomposition. J. Astronaut. Sci. 1988, 36, 245–258. [Google Scholar]
- Mortari, D. EULER-q algorithm for attitude determination from vector observations. AIAA J. Guid. Control Dyn. 1998, 21, 328–334. [Google Scholar] [CrossRef]
- Patera, R.P. Attitude estimation based on observation vector inertia. Adv. Space Res. 2018, 62, 383–397. [Google Scholar] [CrossRef]
- Yang, Y. Attitude determination using Newton’s method on Riemannian manifold. Proc. IMechE Part G J. Aerosp. Eng. 2015, 229, 2737–2742. [Google Scholar] [CrossRef]
- Zhou, Z.; Wu, J.; Wang, J.; Fourati, H. Optimal, Recursive and Sub-optimal Linear Solutions to Attitude Determination from Vector Observations for GNSS/Accelerometer/Magnetometer Orientation Measurement. Remote Sens. 2018, 10, 377. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Fourati, H.; Li, R.; Liu, M. Generalized Linear Quaternion Complementary Filter for Attitude Estimation from Multi-Sensor Observations: An Optimization Approach. IEEE Trans. Auto. Sci. Eng. 2019, 16, 1330–1343. [Google Scholar] [CrossRef]
- Marins, J.; Yun, X.; Bachmann, E.; McGhee, R.; Zyda, M. An extended Kalman filter for quaternion-based orientation estimation using MARG sensors. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; Volume 4. [Google Scholar]
- Fourati, H.; Manamanni, N.; Afilal, L.; Handrich, Y. Complementary Observer for Body Segments Motion Capturing by Inertial and Magnetic Sensors. IEEE/ASME Trans. Mech. 2014, 19, 149–157. [Google Scholar] [CrossRef]
- Yun, X.; Bachmann, E.R.; McGhee, R.B. A simplified quaternion-based algorithm for orientation estimation from earth gravity and magnetic field measurements. IEEE Trans. Instrum. Meas. 2008, 57, 638–650. [Google Scholar] [CrossRef]
- Bar-Itzhack, I.Y.; Harman, R.R. Optimized TRIAD Algorithm for Attitude Determination. AIAA J. Guid. Control Dyn. 1997, 20, 208–211. [Google Scholar] [CrossRef] [Green Version]
- Abdelrahman, M.; Park, S.Y. Simultaneous spacecraft attitude and orbit estimation using magnetic field vector measurements. Aerosp. Sci. Technol. 2011, 15, 653–669. [Google Scholar] [CrossRef]
- Psiaki, M.L. Autonomous Low-Earth-Orbit Determination from Magnetometer and Sun Sensor Data. AIAA J. Guid. Control Dyn. 1999, 22, 296–304. [Google Scholar] [CrossRef]
- Markley, F.L. Fast Quaternion Attitude Estimation from Two Vector Measurements. AIAA J. Guid. Control Dyn. 2002, 25, 411–414. [Google Scholar] [CrossRef] [Green Version]
- Markley, F.L. Optimal Attitude Matrix from Two Vector Measurements. AIAA J. Guid. Control Dyn. 2008, 31, 765–768. [Google Scholar] [CrossRef]
- Wiegand, M. Autonomous Satellite Navigation via Kalman Filtering of Magnetometer Data. Acta Astronaut. 1996, 38, 395–403. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Fourati, H.; Cheng, Y. A Super Fast Attitude Determination Algorithm for Consumer-Level Accelerometer and Magnetometer. IEEE Trans. Consum. Elect. 2018, 64, 375–381. [Google Scholar] [CrossRef]
- de Ruiter, A.H.J.; Forbes, J.R. Discrete-Time SO(n)-Constrained Kalman Filtering. AIAA J. Guid. Control Dyn. 2017, 40, 28–37. [Google Scholar] [CrossRef]
- de Ruiter, A.H.J. Quadratically Constrained Least Squares with Aerospace Applications. AIAA J. Guid. Control Dyn. 2016, 39, 487–497. [Google Scholar] [CrossRef] [Green Version]
- Zanetti, R.; Majji, M.; Bishop, R.H.; Mortari, D. Norm-Constrained Kalman Filtering. AIAA J. Guid. Control Dyn. 2009, 32, 1458–1465. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L.; Cheng, Y. Survey of Nonlinear Attitude Estimation Methods. AIAA J. Guid. Control Dyn. 2007, 30, 12–28. [Google Scholar] [CrossRef]
- Davenport, P.B. A Vector Approach to the Algebra of Rotations with Applications; Technical Report August; NASA: Washington, DC, USA, 1968. [Google Scholar]
- Mortari, D. ESOQ-2 single-point algorithm for fast optimal spacecraft attitude determination. Adv. Astronaut. Sci. 1997, 95 Pt 2, 817–825. [Google Scholar]
- Yang, Y.; Zhou, Z. An analytic solution to Wahbas problem. Aerosp. Sci. Technol. 2013, 30, 46–49. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Gao, B.; Li, R.; Cheng, Y.; Fourati, H. Fast Linear Quaternion Attitude Estimator Using Vector Observations. IEEE Trans. Auto. Sci. Eng. 2018, 15, 307–319. [Google Scholar] [CrossRef]
- Wu, J. Optimal Continuous Unit Quaternions from Rotation Matrices. AIAA J. Guid. Control. Dyn. 2019, 42, 919–922. [Google Scholar] [CrossRef]
- Barfoot, T.; Forbes, J.R.; Furgale, P.T. Pose estimation using linearized rotations and quaternion algebra. Acta Astronaut. 2011, 68, 101–112. [Google Scholar] [CrossRef]
- Wu, J. Real-time Magnetometer Disturbance Estimation via Online Nonlinear Programming. IEEE Sens. J. 2019, 19, 4405–4411. [Google Scholar] [CrossRef]
- Chang, G.; Xu, T.; Wang, Q. Error analysis of Davenport’s q method. Automatica 2017, 75, 217–220. [Google Scholar] [CrossRef]
- Nguyen, T.; Cahoy, K.; Marinan, A. Attitude Determination for Small Satellites with Infrared Earth Horizon Sensors. AIAA J. Spacecr. Rocket. 2018, 55, 1466–1475. [Google Scholar] [CrossRef]
- Carrio, A.; Bavle, H.; Campoy, P. Attitude estimation using horizon detection in thermal images. Int. J. Micro Air Veh. 2018, 10, 352–361. [Google Scholar] [CrossRef] [Green Version]
- Abdelrahman, M.; Park, S.Y. Integrated attitude determination and control system via magnetic measurements and actuation. Acta Astronaut. 2011, 69, 168–185. [Google Scholar] [CrossRef] [Green Version]
- Sabatini, A.M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef] [PubMed]
- Valenti, R.G.; Dryanovski, I.; Xiao, J. A Linear Kalman Filter for MARG Orientation Estimation Using the Algebraic Quaternion Algorithm. IEEE Trans. Instrum. Meas. 2016, 65, 467–481. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Chen, J.; Fourati, H.; Li, R. Fast Complementary Filter for Attitude Estimation Using Low-Cost MARG Sensors. IEEE Sens. J. 2016, 16, 6997–7007. [Google Scholar] [CrossRef]
- Wu, J.; Wang, T.; Zhou, Z.; Yin, H.; Li, R. Analytic accelerometer-magnetometer attitude determination without reference information. Int. J. Micro Air Veh. 2019, 10, 318–329. [Google Scholar] [CrossRef]
- Furgale, P.; Enright, J.; Barfoot, T. Sun sensor navigation for planetary rovers: Theory and field testing. IEEE Trans. Aerosp. Elec. Syst. 2011, 47, 1631–1647. [Google Scholar] [CrossRef]
- Hajiyev, C.; Cilden, D.; Somov, Y. Gyro-free attitude and rate estimation for a small satellite using SVD and EKF. Aerosp. Sci. Technol. 2016, 55, 324–331. [Google Scholar] [CrossRef]












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Shan, S. Dot Product Equality Constrained Attitude Determination from Two Vector Observations: Theory and Astronautical Applications. Aerospace 2019, 6, 102. https://doi.org/10.3390/aerospace6090102
Wu J, Shan S. Dot Product Equality Constrained Attitude Determination from Two Vector Observations: Theory and Astronautical Applications. Aerospace. 2019; 6(9):102. https://doi.org/10.3390/aerospace6090102
Chicago/Turabian StyleWu, Jin, and Shangqiu Shan. 2019. "Dot Product Equality Constrained Attitude Determination from Two Vector Observations: Theory and Astronautical Applications" Aerospace 6, no. 9: 102. https://doi.org/10.3390/aerospace6090102