Trajectory Optimization of Extended Formation Flights for Commercial Aviation


Abstract
:1. Introduction
2. Trajectory Optimization Formulation
2.1. Trajectory Modelling
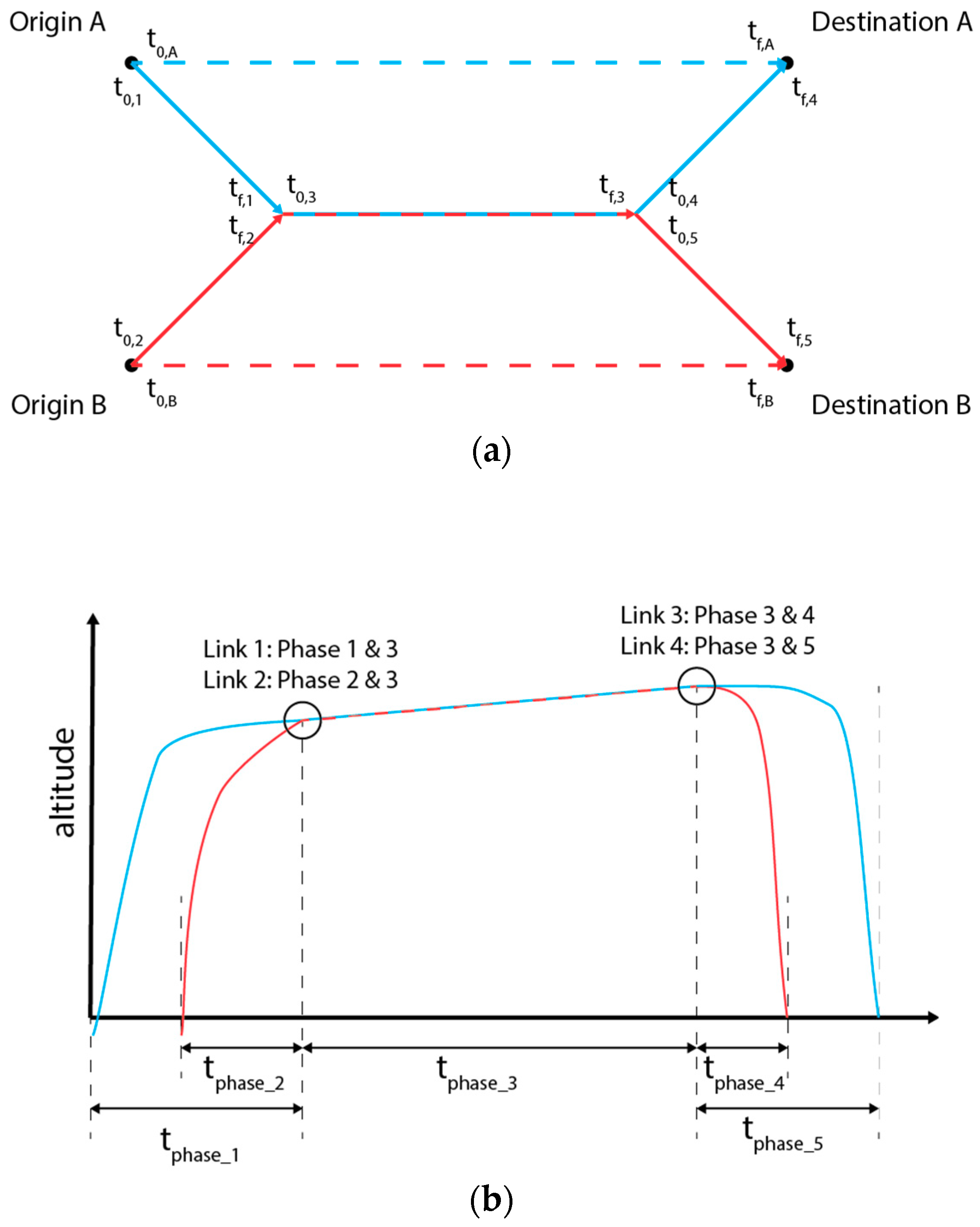
2.1.1. Two-Ship Formation Flight
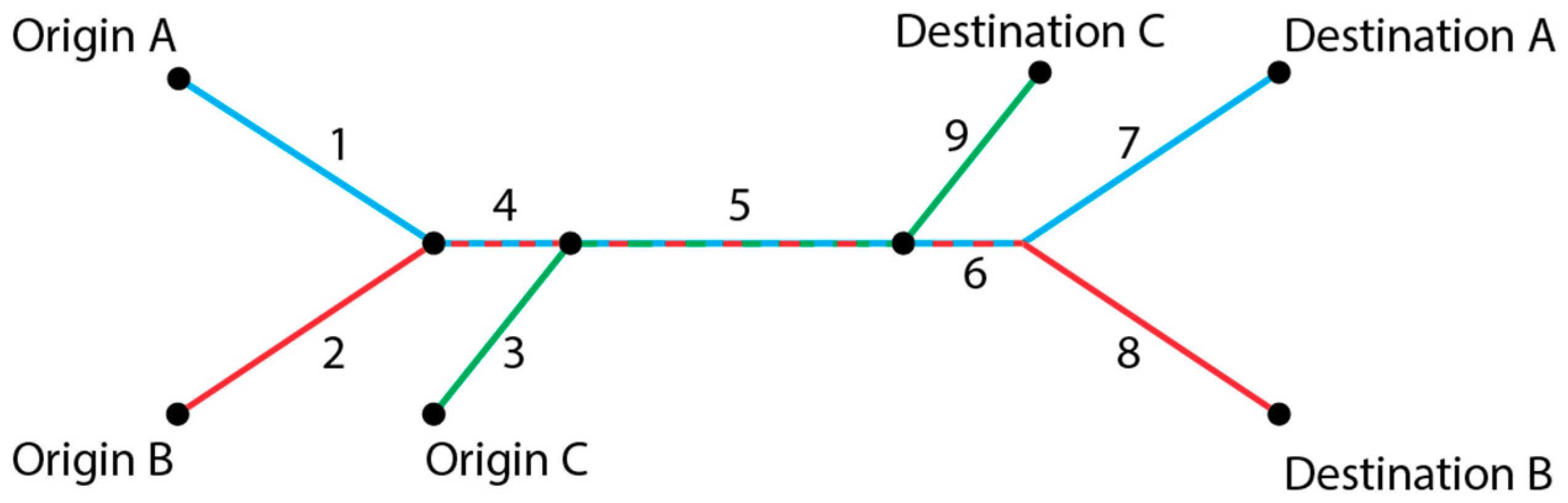
2.1.2. Three-Ship Formation Flight
2.2. Equations of Motion
2.3. Optimization Criteria
2.4. Constraints, Staging and Boundary Conditions
- Link 1: Links phase 1 to phase 3
- Link 2: Links phase 2 to phase 3
- Link 3: Links phase 3 to phase 4
- Link 4: Links phase 3 with phase 5
- Link 1: Connects phase 1 with phase 4
- Link 2: Connects phase 2 with phase 4
- Link 3: Connects phase 3 with phase 5
- Link 4: Connects phase 4 with phase 5
- Link 5: Connects phase 5 with phase 6
- Link 6: Connects phase 5 with phase 9
- Link 7: Connects phase 6 with phase 7
- Link 8: Connects phase 6 with phase 8
3. Trajectory Optimization Framework
4. Case Study
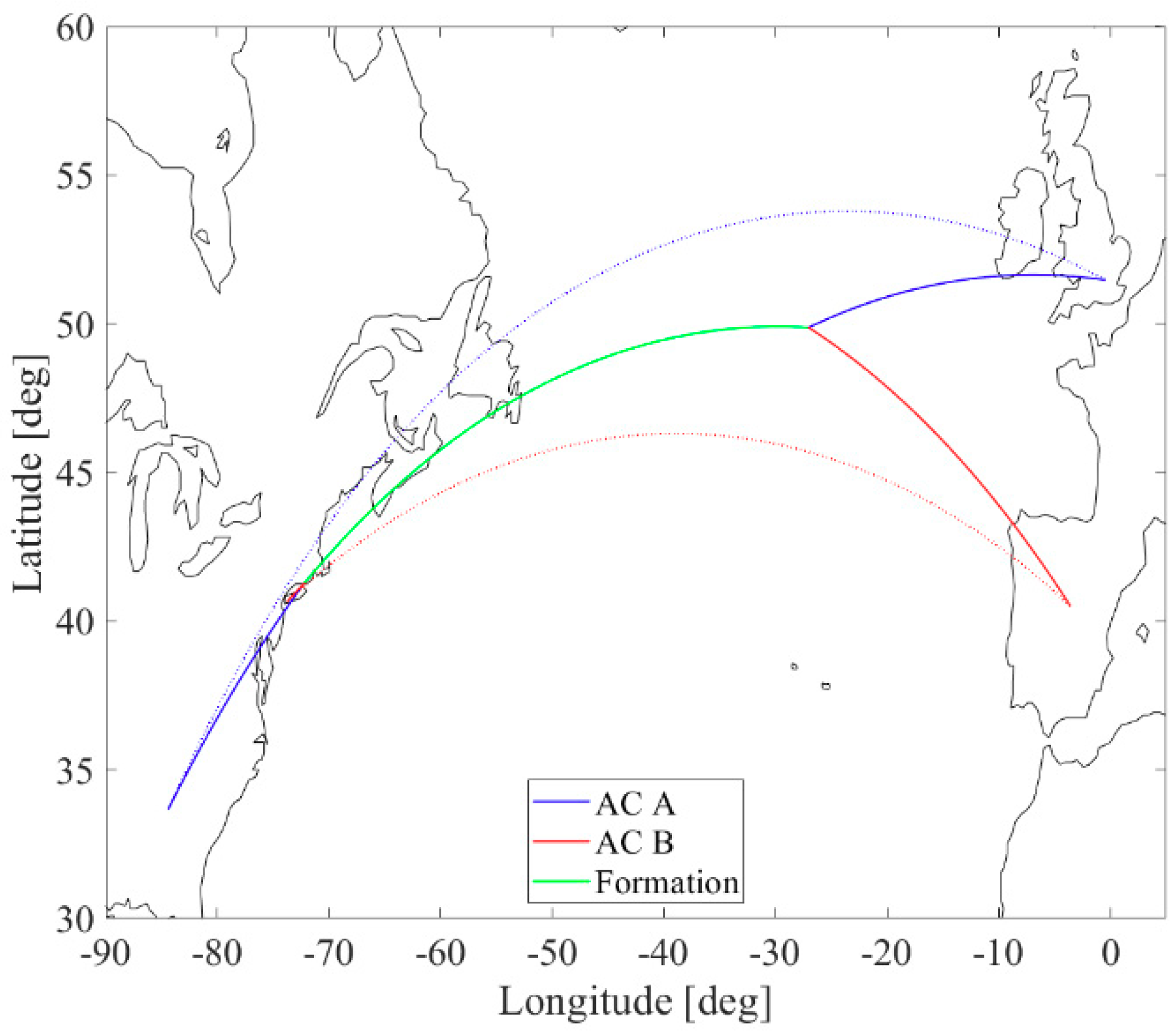
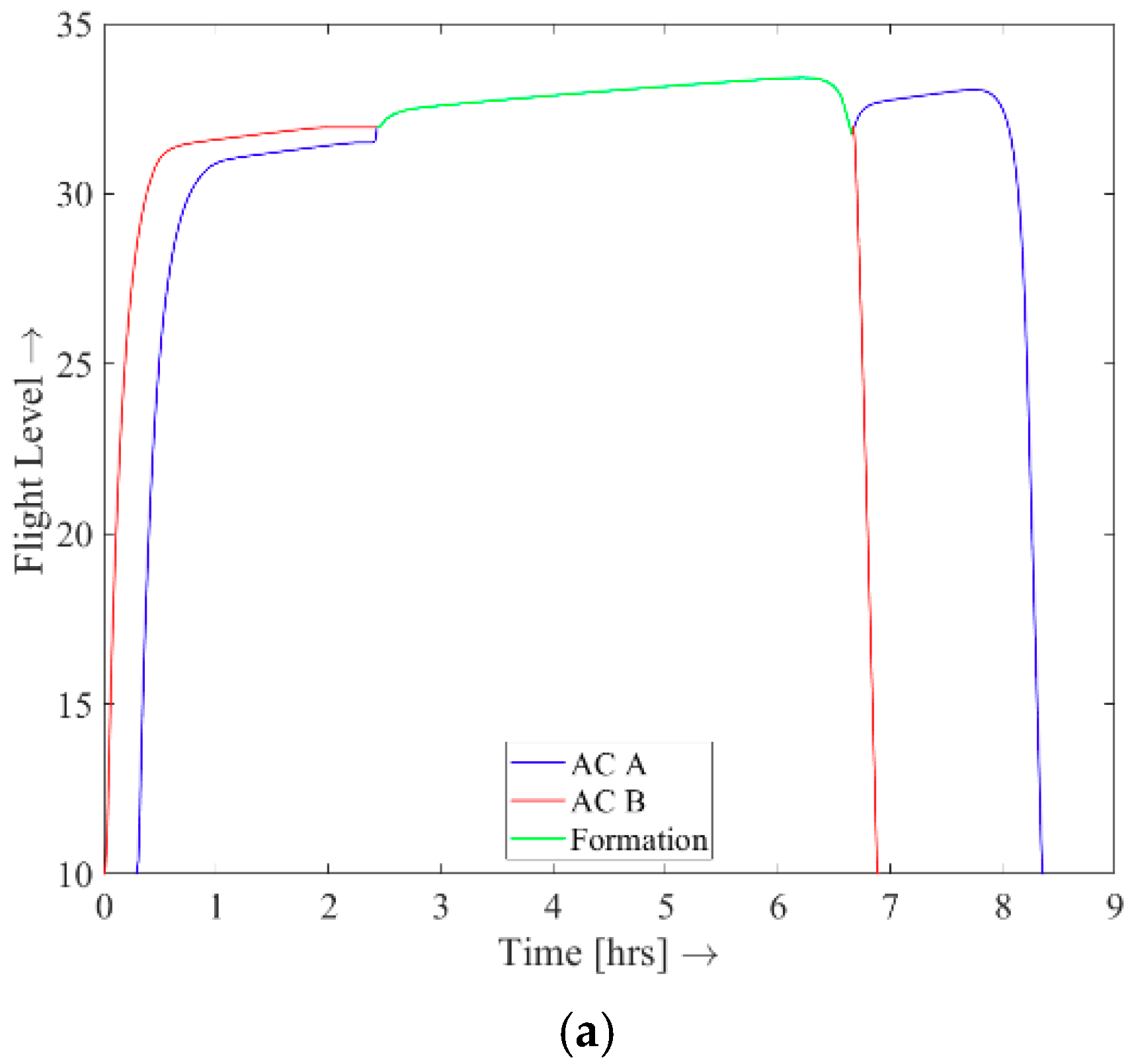
4.1. Baseline Scenario
- Aircraft A: B744 (i.e., B747-400) from London (LHR) to Atlanta (ATL)
- Aircraft B: B744 from Madrid (MAD) to New York City (JFK)
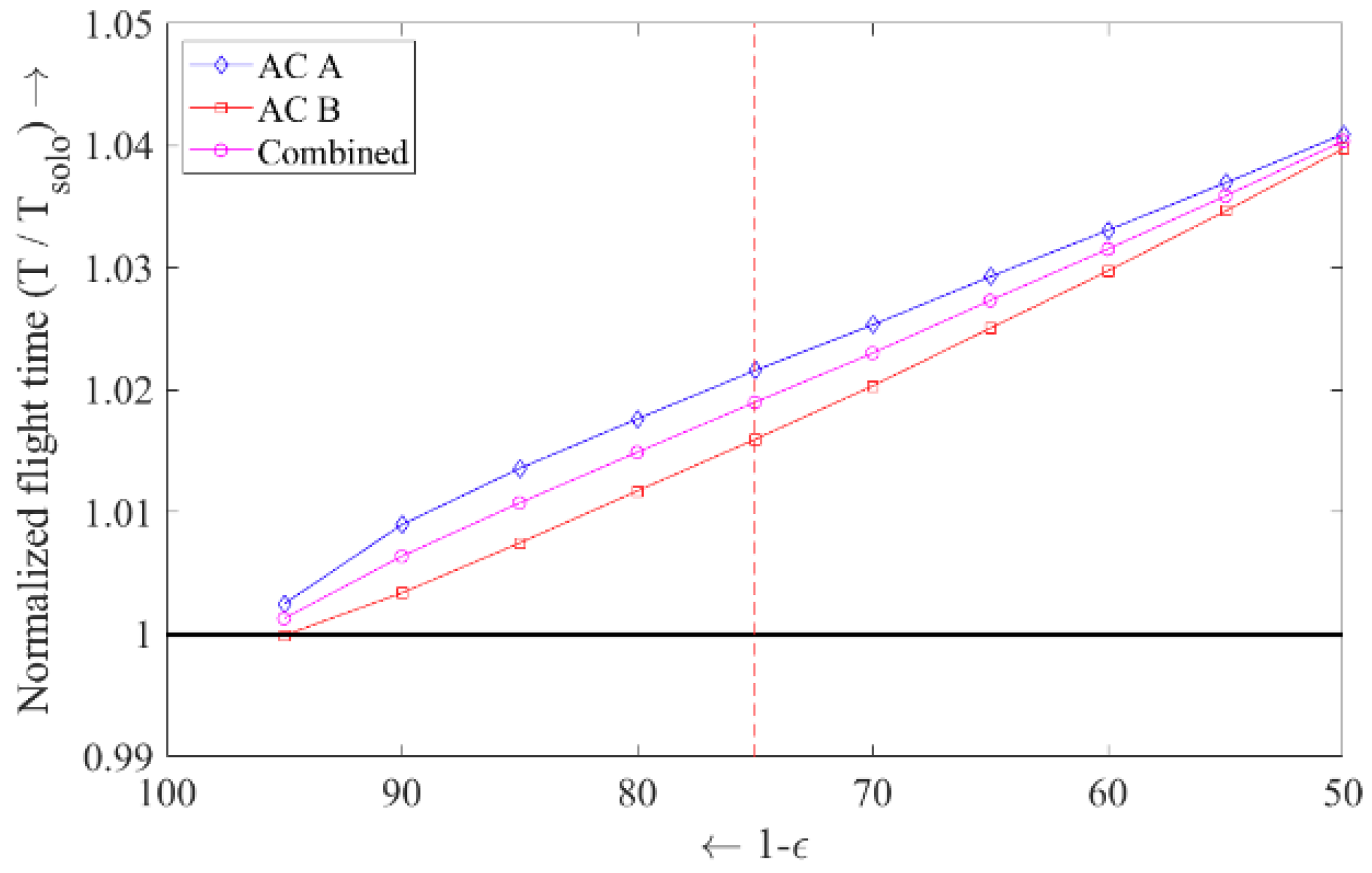
4.2. Sensitivity Analysis
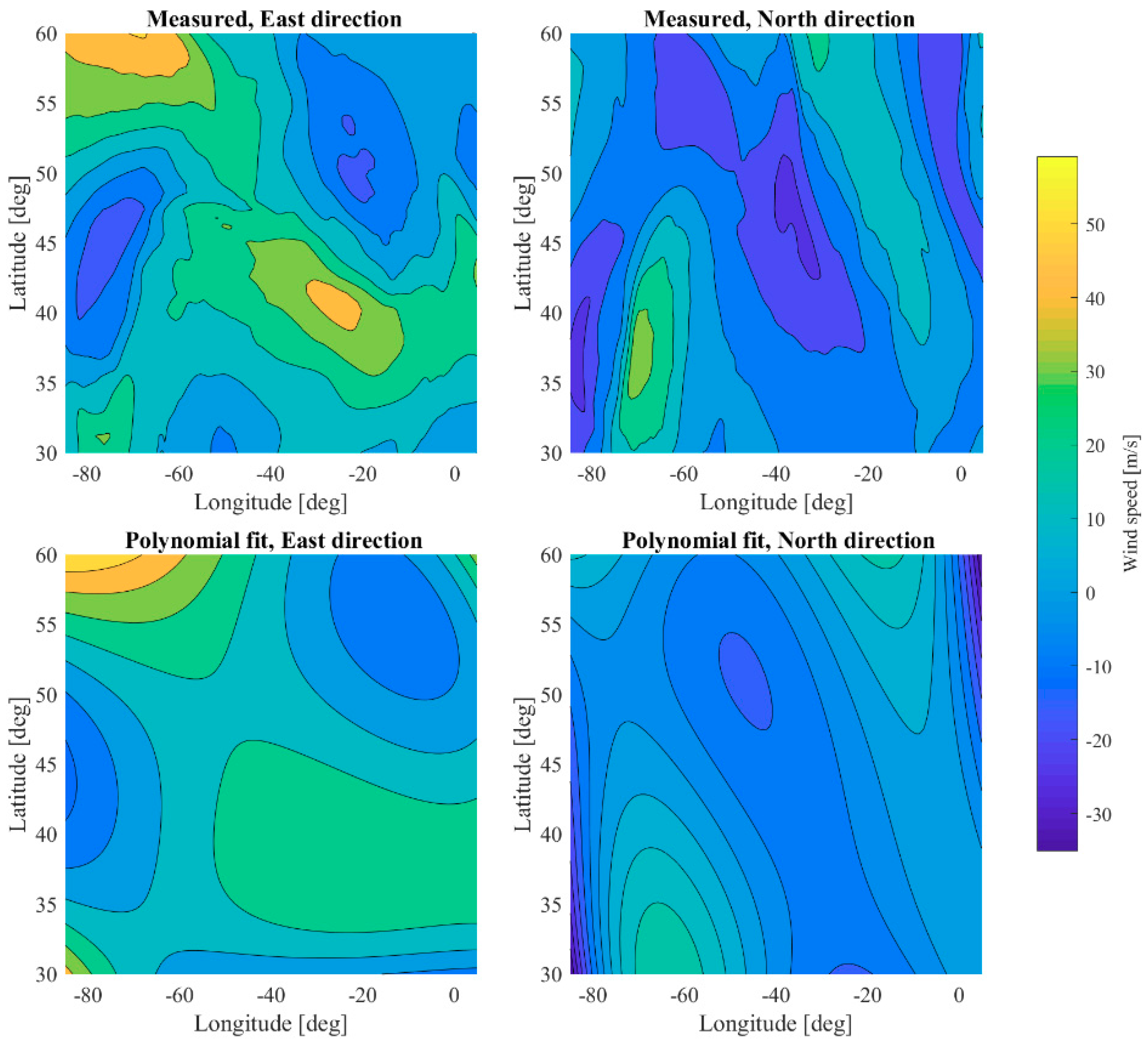
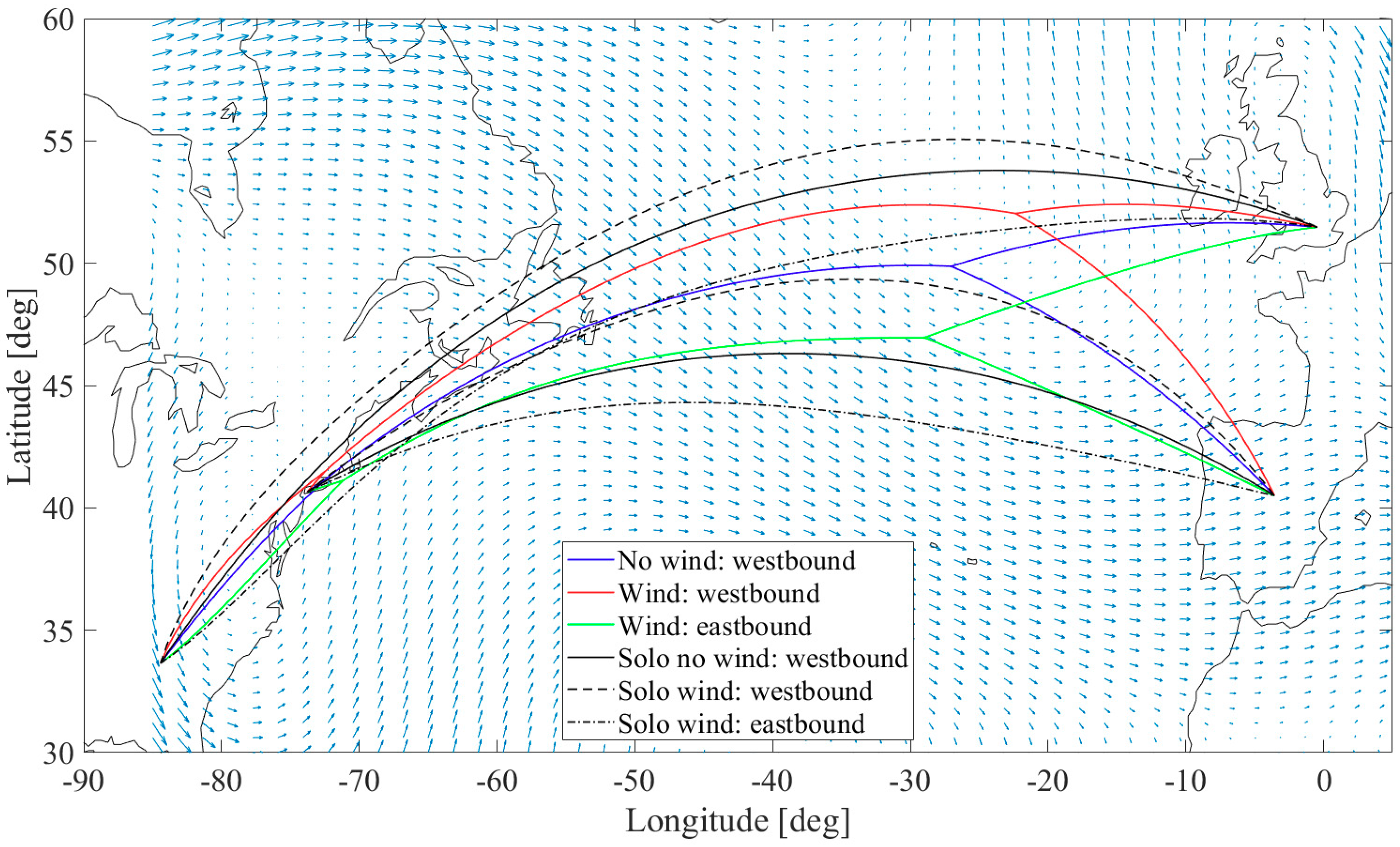
4.3. Formation Flight in the Presence of Wind
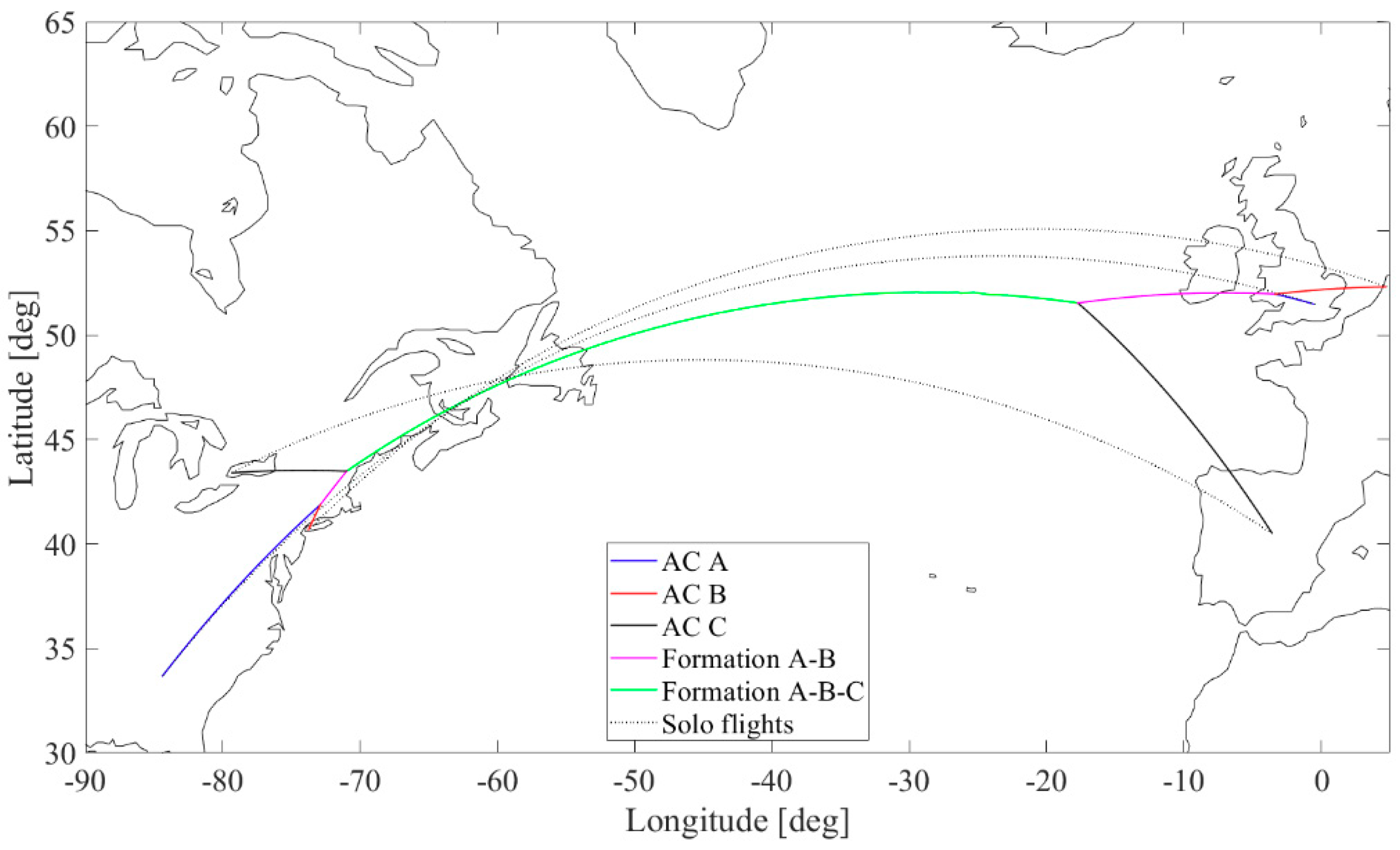
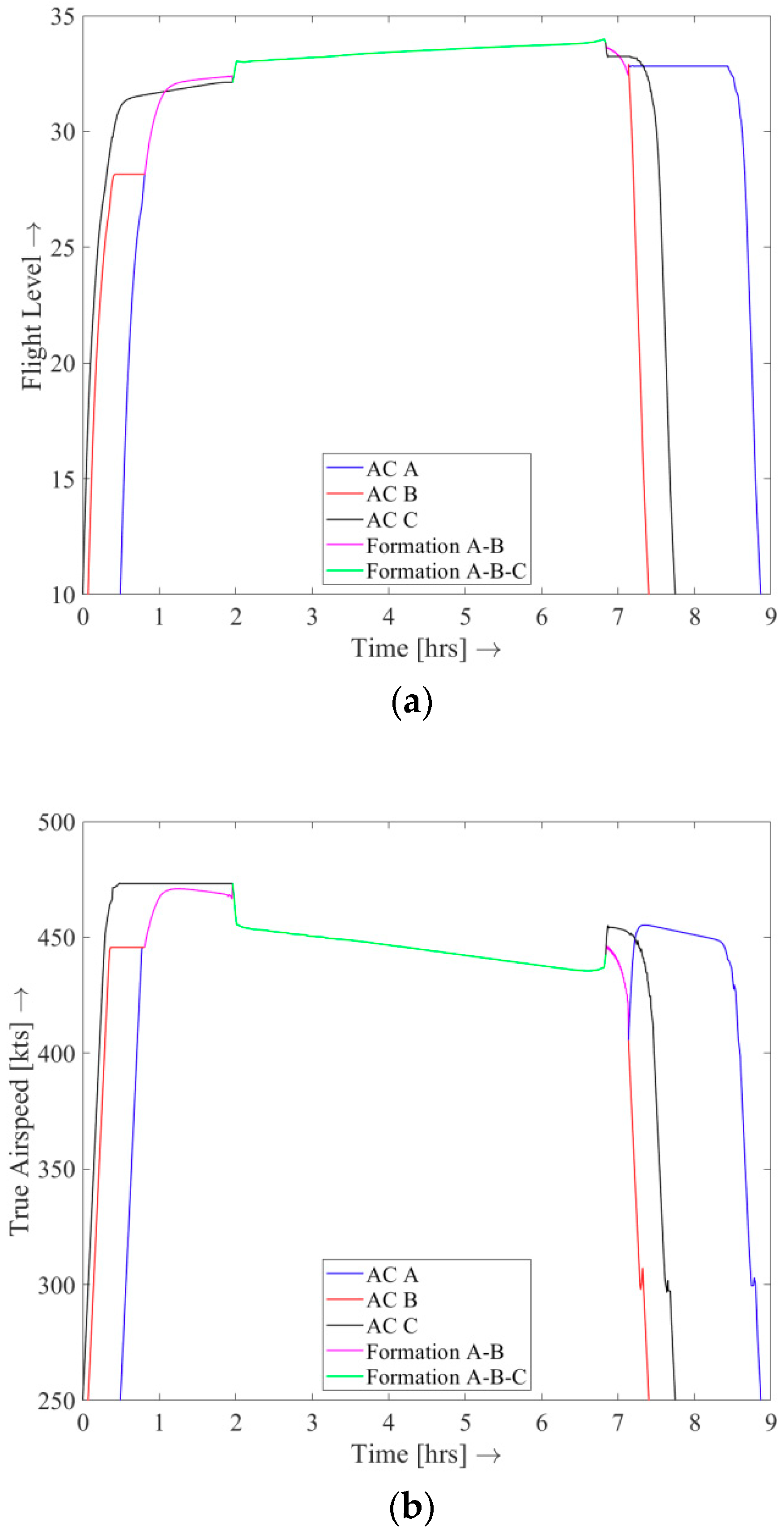
4.4. Three-ship Formation Flight
- Aircraft A: B744 from London to Atlanta
- Aircraft B: B744 from Amsterdam to New York City
- Aircraft C: B744 from Madrid to Toronto
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pahle, J.; Berger, D.; Venti, M.; Duggan, C.; Faber, J.; Cardinal, K. An Initial Flight Investigation of Formation Flight for Drag Reduction on the C-17 Aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 13. [Google Scholar]
- Nangia, R.K.; Palmer, M.E. Formation Flying of Commercial Aircraft, Variations in Relative Size/Spacing—Induced Effects and Control. In Proceedings of the AIAA Applied Aerodynamics Conference, Miaml, FL, USA, 25–28 June 2007. [Google Scholar]
- Bower, G.C.; Flanzer, T.C.; Kroo, I.M. Formation Geometries and Route Optimization for Commercial Formation Flight. In Proceedings of the AIAA Applied Aerodynamics Conference, San Antonio, TX, USA, 22–25 June 2009; p. 18. [Google Scholar]
- Xue, M.; Hornby, G.S. An Analysis of the Potential Savings from Using Formation Flight in the NAS. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 12. [Google Scholar]
- Marks, T.; Linke, F.; Gollnick, V. Evaluation of potential fuel savings by introducing formation flight on a North Atlantic scenario. In Proceedings of the 5th International Air Transport and Operations Symposium (ATOS), Delft, The Netherlands, 20–23 July 2015. [Google Scholar]
- Liu, Y.; Stumpf, E. Estimation of Vehicle-Level Fuel Burn Benefits of Aircraft Formation Flight. J. Aircr. 2017, 55, 853–861. [Google Scholar] [CrossRef]
- Blake, W.; Multhopp, D. Design, Performance and Modeling Considerations for Close Formation Flight. In Proceedings of the 23rd AIAA Guidance, Navigation and Control Conference, Boston, MA, USA, 10–12 August 1998. [Google Scholar]
- Bramesfeld, G.; Maughmer, M. The Effects on Formation-Flight Aerodynamics Due to Wake Rollup. J. Aircr. 2008, 45, 1167–1173. [Google Scholar] [CrossRef]
- Ning, S.A.; Flanzer, T.C.; Kroo, I.M. Aerodynamic Performance of Extended Formation Flight. J. Aircr. 2011, 48, 855–865. [Google Scholar] [CrossRef]
- Veldhuis, L.; Voskuijl, M.; Fransen, B. Formation Flight-Fine-tuning of Theoretical Performance Prediction. In Proceedings of the AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 7–10 January 2013; p. 17. [Google Scholar]
- Kless, J.E.; Aftosmis, M.J.; Ning, S.A.; Nemec, M. Inviscid Analysis of Extended-Formation Flight. AIAA J. 2013, 51, 1703–1715. [Google Scholar] [CrossRef] [Green Version]
- Ning, S.A.; Kroo, I.; Aftosmis, M.J.; Nemec, M.; Kless, J.E. Extended Formation Flight at Transonic Speeds. J. Aircr. 2014, 51, 1501–1510. [Google Scholar] [CrossRef]
- Slotnick, J.P. Computational Aerodynamic Analysis for the Formation Flight for Aerodynamic Benefit Program. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar] [CrossRef]
- Xu, J.; Ning, S.A.; Bower, G.; Kroo, I. Aircraft Route Optimiza-tion for Formation Flight. J. Aircr. 2014, 51, 490–501. [Google Scholar] [CrossRef]
- Kent, T.; Richards, A. Analytic Approach to Optimal Routing for Commercial Formation Flight. J. Guid. Control Dyn. 2015, 38, 1872–1884. [Google Scholar] [CrossRef]
- Verhagen, C.M.A.; Visser, H.G.; Santos, B.F. A Decentralized Approach to Formation Flight Routing of Long-Haul Commercial Flights. Proc. Instit. Mechan. Eng. Part G J. Aerosp. Eng. 2019, 233, 2992–3004. [Google Scholar] [CrossRef]
- Doole, M.; Visser, H.G. A Multi-stage Centralized Approach to Formation Flight Routing and Assignment of Long-haul Airline Operations. In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS), Madeira, Spain, 16–18 March 2018. [Google Scholar]
- Hartjes, S.; Van Hellenberg Hubar, M.E.G.; Visser, H.G. Multiple-phase Trajectory Optimization for Formation Flight in Civil Aviation. CEAS Aeronaut J. 2019, 10, 453–462. [Google Scholar] [CrossRef]
- Franco, A.; Rivas, D. Optimization of Multiphase Aircraft Trajectories Using Hybrid Optimal Control. J. Guid. Control Dyn. 2015, 38, 452–467. [Google Scholar] [CrossRef]
- Kamgarpour, M.; Soler, M.; Tomlin, C.J.; Olivares, A.; Lygeros, J. Hybrid Optimal Control for Aircraft Trajectory Design with a Variable Sequence of Modes. In Proceedings of the 18th IFAC World Congress, Milano, Italy, 28 August–2 September 2011. [Google Scholar]
- Bonami, P.; Olivares, A.; Soler, M.; Staffetti, E. Multiphase Mixed-Integer Optimal Control Approach to Aircraft Trajectory Optimization. J. Guid. Control Dyn. 2013, 36, 1267–1277. [Google Scholar] [CrossRef] [Green Version]
- Visser, H.G. Airplane Performance Optimization, article eae393. In Encyclopedia of Aerospace Engineering; John Wiley and Sons, Inc.: New York, NY, USA, 2010. [Google Scholar]
- Gardi, A.; Sabatini, R.; Ramasamy, S. Multi-objective optimisation of aircraft flight trajectories in the ATM and avionics context. Prog. Aerosp. Sci. 2016, 83, 1–36. [Google Scholar] [CrossRef]
- Francolin, C.; Rao, A.V. Direct Trajectory Optimization and Costate Estimation of State Inequality Path-Constrained Optimal Control Problems Using a Radau Pseudospectral Method. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 11. [Google Scholar]
- Rao, A.V.; Benson, D.A.; Darby, C.L.; Patterson, M.; Francolin, C.; Sanders, I.; Huntington, G.T. Algorithm 902: GPOPS, A MATLAB Software for Solving Multiple-Phase Optimal Control Problems Using the Gauss Pseudospectral Method. ACM Trans. Mathem. Softw. 2010, 37, 1–39. [Google Scholar] [CrossRef]
- Teengs, M. Model of the Boeing 747-400 with CF6-80C2B1F Engines; Unpublished Report; TU Delft: Delft, The Netherlands, 2006. [Google Scholar]
- Voskuijl, M. Cruise Range in Formation Flight. J. Aircr. 2017, 54, 2184–2191. [Google Scholar] [CrossRef] [Green Version]
- Van Hellenberg Hubar, M.E.G. Multiple-Phase Trajectory Optimization for Formation Flight in Civil Aviation. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2017. [Google Scholar]
- Government of Canada. GDPS Data in GRIB2 Format: 66 km. Available online: https://weather.gc.ca/grib/grib2_glb_66km_e.html (accessed on 25 May 2016).
- García-Heras, J.; Soler, M.; González-Arribas, D. Characterization and Enhancement of Flight Planning Predictability under Wind Uncertainty. Int. J. Aerosp. Eng. 2019, 2019, 6141452. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Results | Solo Flight | Formation Flight | ||||
|---|---|---|---|---|---|---|
| Aircraft A | Aircraft B | Total | Aircraft A | Aircraft B | Total | |
| Fuel (kg) | 79,093 | 66,239 | 145,332 | 75,530 | 67,238 | 142,768 |
| Time (h) | 7.92 | 6.80 | 14.71 | 8.09 | 6.90 | 14.99 |
| Distance (km) | 6768 | 5760 | 12,529 | 6825 | 5835 | 12,660 |
| Results | Solo Flight | Formation Flight | ||||
|---|---|---|---|---|---|---|
| Aircraft A | Aircraft B | Total | Aircraft A | Aircraft B | Total | |
| Fuel [kg] | 80,549 | 70,798 | 151,347 | 76,307 | 71,708 | 148,015 |
| Time [h] | 7.98 | 7.04 | 15.03 | 8.12 | 7.19 | 15.32 |
| Distance [km] | 6786 | 5823 | 12,609 | 6792 | 5986 | 12,780 |
| Results | Solo Flight | Formation Flight | ||||
|---|---|---|---|---|---|---|
| Aircraft A | Aircraft B | Total | Aircraft A | Aircraft B | Total | |
| Fuel [kg] | 77,285 | 61,130 | 138,415 | 74,296 | 61,989 | 136,285 |
| Time [h] | 7.84 | 6.53 | 14.37 | 8.02 | 6.62 | 14.64 |
| Distance [km] | 6810 | 5799 | 12,609 | 6960 | 5785 | 12,746 |
| Results | Solo Flight | Formation Flight | ||||||
|---|---|---|---|---|---|---|---|---|
| AC A | AC B | AC C | Total | AC A | AC B | AC C | Total | |
| Fuel [kg] | 79,093 | 67,338 | 69,934 | 216,365 | 71,229 | 69,065 | 60,907 | 201,201 |
| Time [h] | 7.92 | 6.89 | 7.12 | 21.94 | 8.25 | 7.25 | 7.67 | 23.17 |
| Distance [km] | 6768 | 5854 | 6059 | 18,681 | 6806 | 5956 | 6340 | 19,104 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hartjes, S.; Visser, H.G.; van Hellenberg Hubar, M.E.G. Trajectory Optimization of Extended Formation Flights for Commercial Aviation. Aerospace 2019, 6, 100. https://doi.org/10.3390/aerospace6090100
Hartjes S, Visser HG, van Hellenberg Hubar MEG. Trajectory Optimization of Extended Formation Flights for Commercial Aviation. Aerospace. 2019; 6(9):100. https://doi.org/10.3390/aerospace6090100
Chicago/Turabian StyleHartjes, Sander, Hendrikus G. Visser, and Marco E. G. van Hellenberg Hubar. 2019. "Trajectory Optimization of Extended Formation Flights for Commercial Aviation" Aerospace 6, no. 9: 100. https://doi.org/10.3390/aerospace6090100