
A CNN-GRU Hybrid Model for Predicting Airport Departure Taxiing Time


Abstract
:1. Introduction
- (1)
- Two new features, corridor departure flow and departure flow proportion, are proposed to further improve the departure taxiing time feature set as well as the dataset.
- (2)
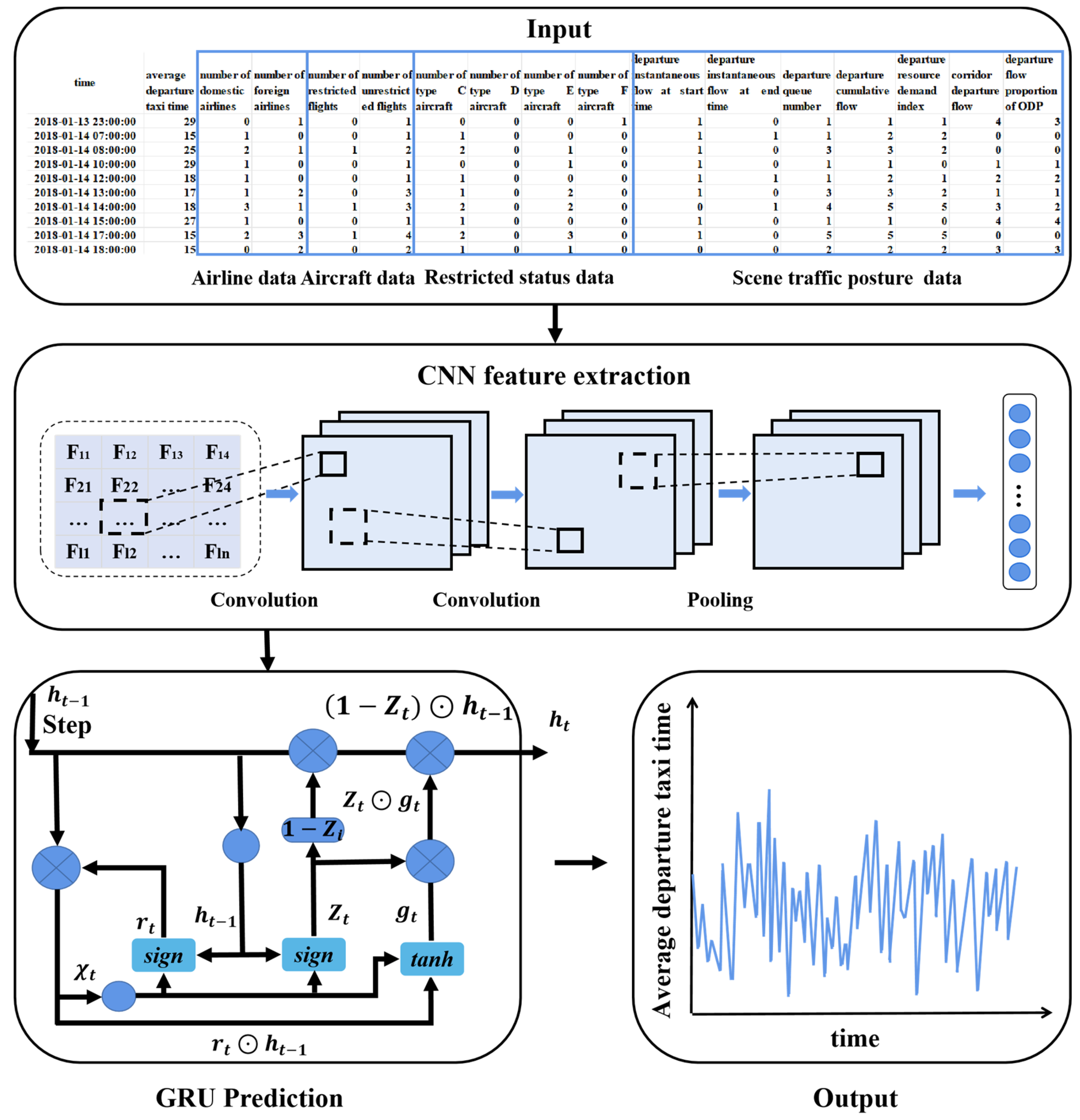
- A departure taxiing time prediction model based on CNN-GRU is proposed.
- (3)
- The effectiveness and generalization ability of the proposed features and models are verified on the historical dataset of Pudong International Airport.
2. Literature Review
2.1. Related Work
2.2. Research Gap
- (1)
- (2)
- (3)
- (1)
- Unlike existing departure taxiing time prediction methods, our proposed method focuses on the average departure taxiing time, which can reflect the congestion of the field in a macroscopic way.
- (2)
- Compared with similar methods, we consider not only the conventional traffic flow features but also construct the structural features related to connecting corridors, aircraft groups, and runways in our prediction model, which explores more factors affecting the taxiing time.
- (3)
- In addition, we used a combined deep learning model for taxiing time prediction, using CNNs to extract deep features and inputting them into a GRU for prediction, which improved the prediction accuracy.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Research Object | Features | Prediction Method |
|---|---|---|---|
| Lee et al. [1] (2015) | Average | Runway and fix information, flight call signs, destination airports, aircraft models, initially assigned gate, spot and scheduled gate-out time | Linear optimized sequencing |
| Lee et al. [13] (2016) | Single flight | Terminal concourse, spot, runway, departure fix, and weight class | LR, SVM, KNN, RF, NN |
| Murça [2] (2017) | Single flight | Departure traffic, taxiing distance | Integer linear programming model |
| Li et al. [10] (2020) | Single flight | Weather, runway configuration, aircraft type, time period, airport instantaneous traffic flow, number of ground taxiing aircraft, and taxiing distance | Wide-deep neural network model |
| Kim et al. [6] (2021) | Single flight | Airline, wingspan category, depart apron, take-off runway, operation type, take-off route, month, day of taxiing-out operation, time of taxiing-out operation, CTOT issued, queue length, ground traffic, and air traffic | RF |
| Jiao et al. [5] (2022) | Single flight | Aircraft type, taxiing distance, and airport traffic flow | LSTM |
| Du et al. [11] (2022) | Single flight | Flight properties, surface traffic, and meteorological conditions | Deep metric learning |
| Zhou et al. [7] (2022) | Single flight | Flight information, airport, weather, and airline | GRU |
| Zhang et al. [8] (2023) | Single flight | Scene traffic, gate, airline, and time period | RFR, kernel density estimation |
| Wang et al. [3] (2023) | Single flight | Departure traffic, aircraft type, expected delay and gate | Informer–RFR |
3. Construction of Feature Set and Dataset
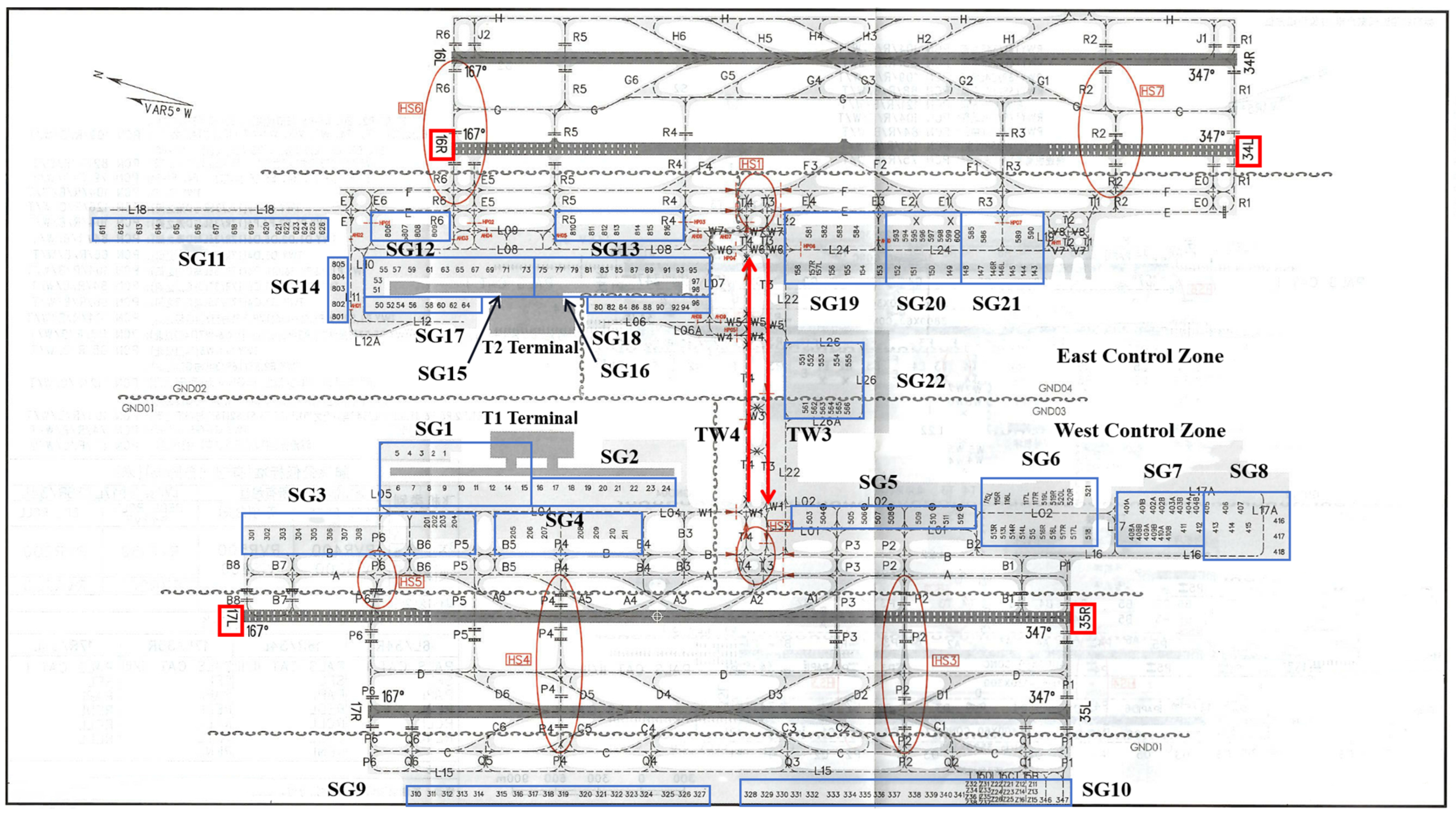
3.1. Layout of Pudong International Airport
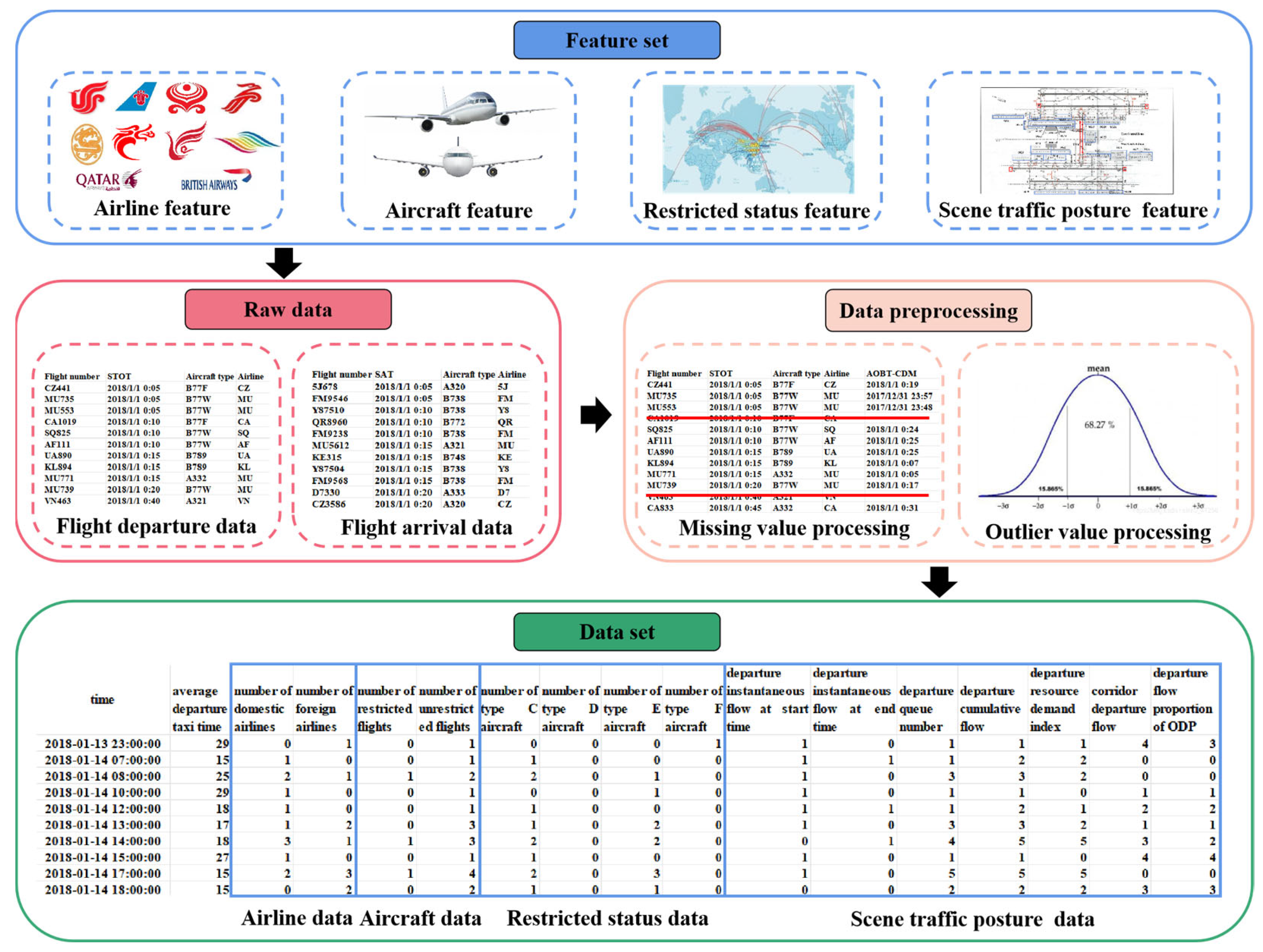
3.2. Construction of Feature Set
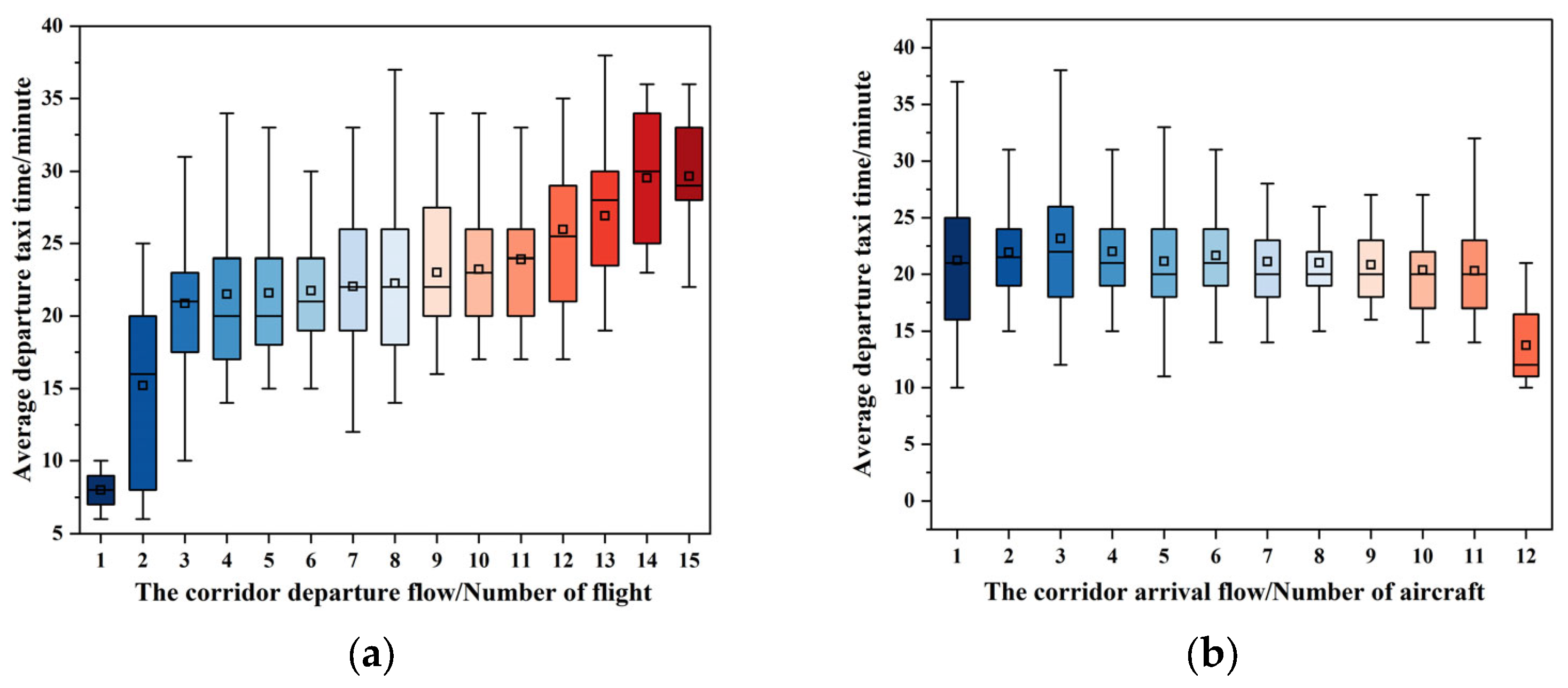
3.2.1. Corridor Departure Flow
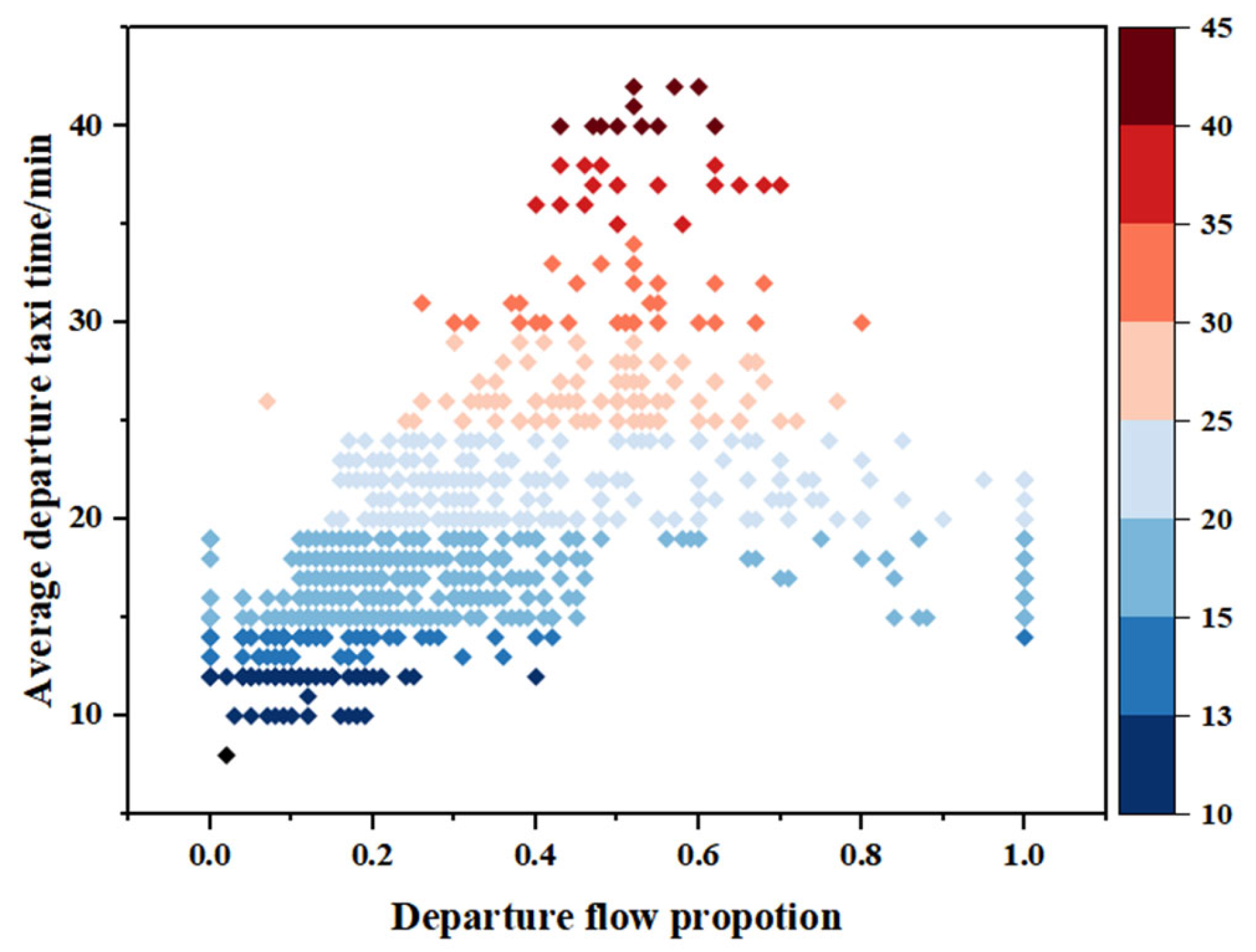
3.2.2. Departure Flow Proportion of ODP
3.3. Construction of Dataset
4. Prediction of Departure Taxiing Time
| Algorithm 1: CNN-GRU-based departure taxiing time prediction |
| Input: training set , test set Output: prediction value —weight matrix, —input vector at time t 1. for each epoch: 2. for each batch in : 3. Perform a convolution operation 4. Perform activation using function 5. Perform pooling operations using max pooling 6. Compute the update gate according to 7. Compute the reset gate according to 8. Compute the candidate state according to 9. Compute the hidden state according to 10. Input the fully connected layer to get the prediction value 11. Compute the mean square loss of 12. Update the by using optimizer 13. end for 14. end for 15. Input into the best trained model to get the prediction value |
5. Experiments
5.1. Experimental Setup
5.2. Results and Discussions
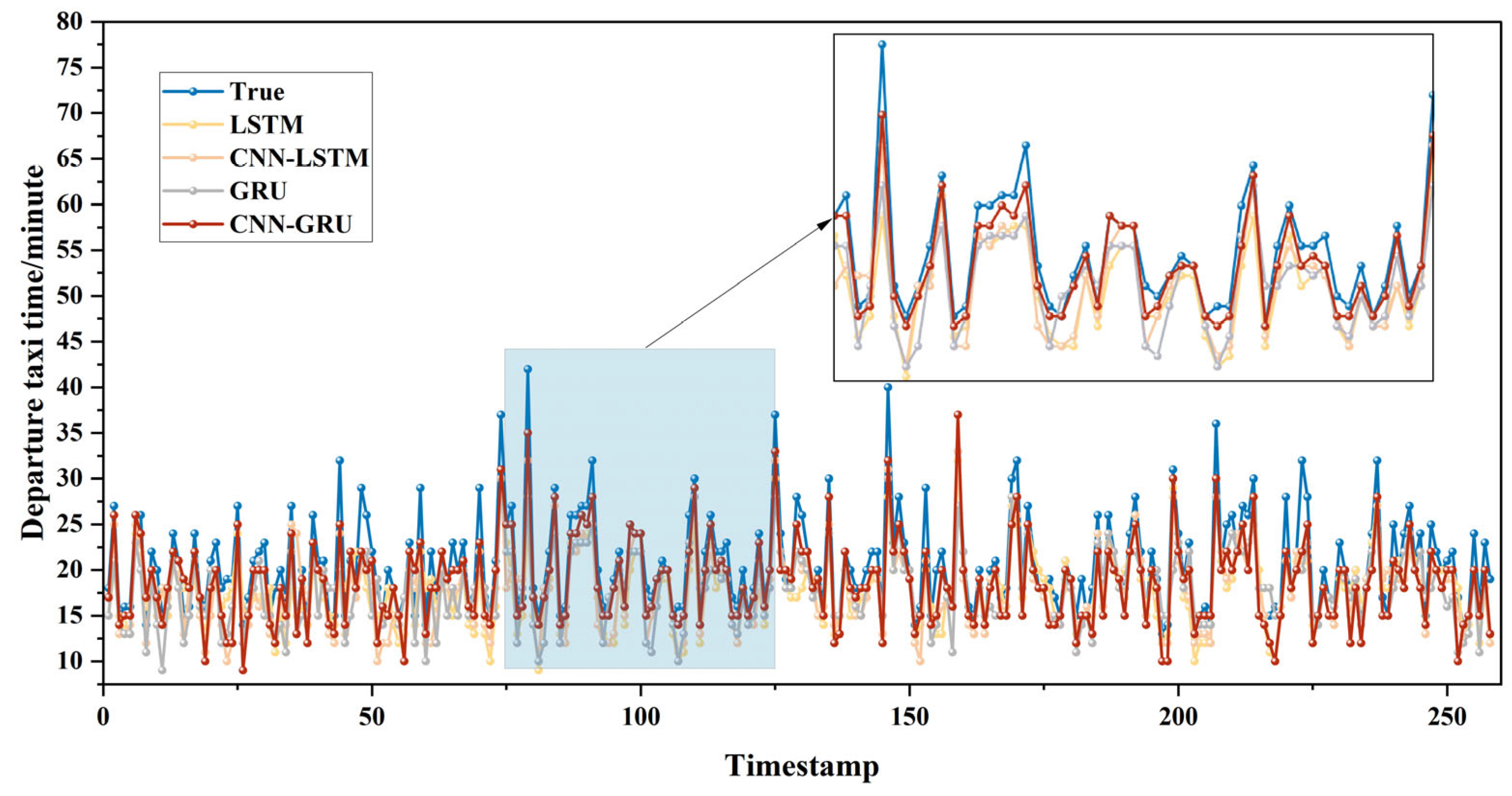
5.2.1. Performance Comparison of Different Prediction Models
5.2.2. Taxiing Time Prediction for Different ODPs
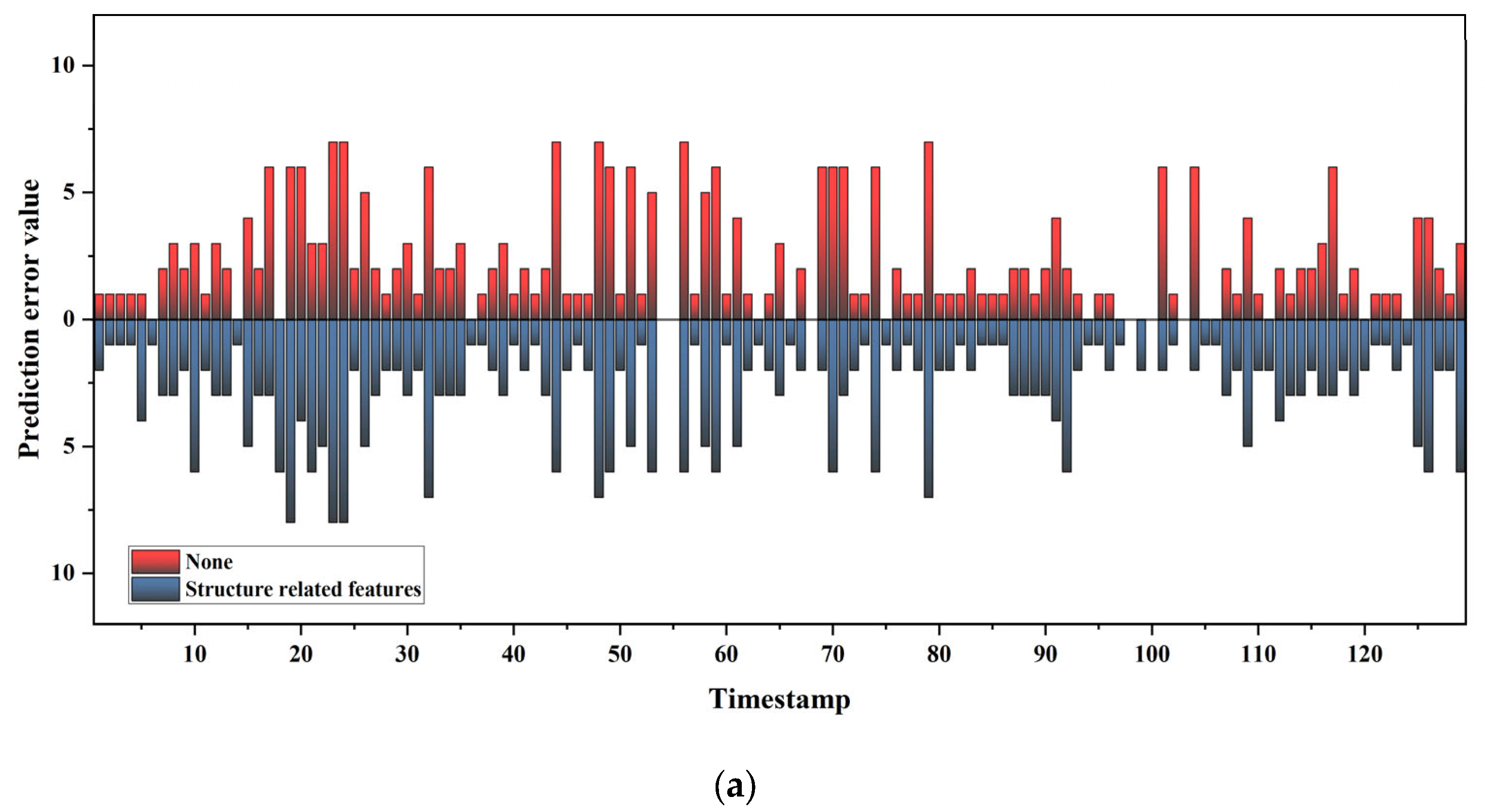
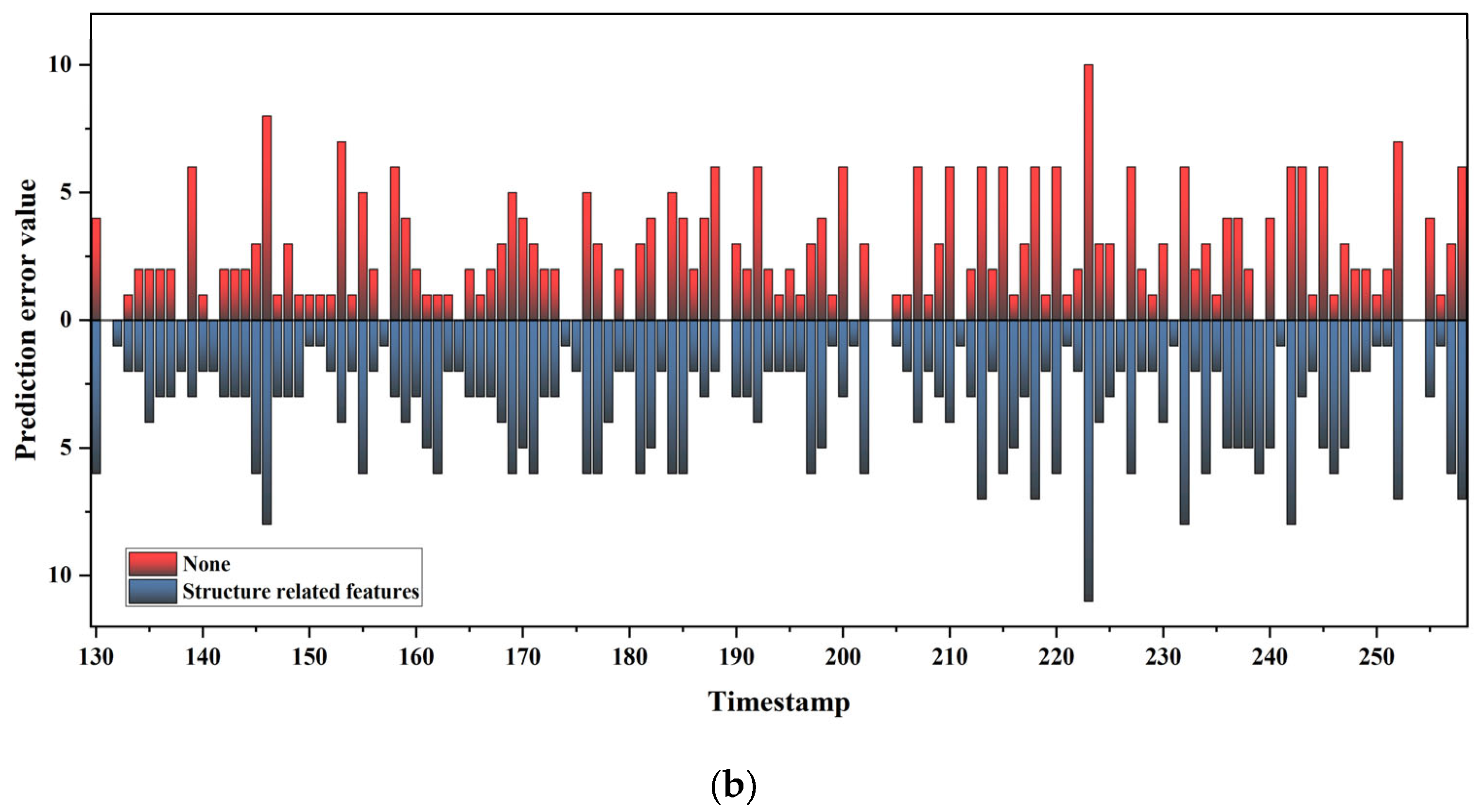
5.2.3. Prediction with Different Features
5.2.4. Prediction with Different Length of Time Slice
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lee, H.; Malik, W.; Zhang, B.; Nagarajan, B.; Jung, Y.C. Taxiing time prediction at Charlotte Airport using fast-time simulation and machine learning techniques. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar]
- Murça, M.C.R. A robust optimization approach for airport departure metering under uncertain taxiing-out time predictions. Aerosp. Sci. Technol. 2017, 68, 269–277. [Google Scholar] [CrossRef]
- Wang, F.; Bi, J.; Xie, D.; Zhao, X. A data-driven prediction model for aircraft taxiing time by considering time series about gate and real-time factors. Transp. Metr. A Transp. Sci. 2023, 19, 2071353. [Google Scholar]
- Jeong, M.; Eun, Y.; Jeon, D.; Bang, H. Unimpeded Taxiing-Time Prediction Based on the Node–Link Model. J. Aerosp. Inf. Syst. 2020, 17, 591–602. [Google Scholar] [CrossRef]
- Jiao, Q.Y.; Li, N. Taxiing Time Prediction by Using Data Driven Approach: A New Perspective [Preprint]. Available at SSRN 4084964. 2022. [CrossRef]
- Kim, J.; Baik, H. Taxiing-Out Time Prediction at a Busy Airport using Random Forest Algorithm. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021. [Google Scholar]
- Zhou, H.; Li, W.; Jiang, Z.; Cai, F.; Xue, Y. Flight Departure Time Prediction Based on Deep Learning. Aerospace 2022, 9, 394. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, X.; Yin, J.; Zhou, X. Flexible Control of Aircraft Departure Rollout Based on Probabilistic Taxiing Time. Aeronaut. J. 2023, 44, 212–225. [Google Scholar]
- Wang, X.; Brownlee, A.E.; Woodward, J.R.; Weiszer, M.; Mahfouf, M.; Chen, J. Aircraft taxiing time prediction: Feature importance and their implications. Transp. Res. Part C Emerg. Technol. 2021, 124, 102892. [Google Scholar] [CrossRef]
- Li, N.; Jiao, Q.Y.; Zhang, L.; Wang, S.C. Using Deep Learning Method to Predict Taxiing Time of Aircraft: A case of Hong Kong Airport. J. Aeronaut. Astronaut. Aviat. Ser. A 2020, 52, 371–386. [Google Scholar] [CrossRef]
- Du, J.; Hu, M.; Zhang, W.; Yin, J. Finding Similar Historical Scenarios for Better Understanding Aircraft Taxiing Time: A Deep Metric Learning Approach. IEEE Intell. Transp. Syst. Mag. 2022, 15, 101–116. [Google Scholar] [CrossRef]
- Xia, Z.; Huang, L. Prediction of departure flights’ taxiing-out time based on intelligent algorithm optimized BP. Math. Probl. Eng. 2022, 2022, 6254251. [Google Scholar] [CrossRef]
- Lee, H.; Malik, W.; Jung, Y.C. Taxiing-out time prediction for departures at Charlotte airport using machine learning techniques. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Tang, X.; Chen, Z.; Zhang, S.; Ding, Y. Impact of Apron Spatial Configuration on Flight Departure Taxiing Time at Busy Airports. J. Transp. Syst. Eng. Inf. Technol. 2022, 22, 309. [Google Scholar]








| Feature Categories | Feature Name | |
|---|---|---|
| Airline | Number of domestic airlines, number of foreign airlines | |
| Aircraft | Number of type C aircraft, number of type D aircraft, number of type E aircraft, and number of type F aircraft | |
| Restricted status | Number of restricted flights, number of unrestricted flights | |
| Scene traffic flow | Normal | Departure instantaneous flow at start time, departure instantaneous flow at end time, departure queue number, departure cumulative flow, and departure resource demand index |
| Structure related | Corridor departure flow and departure flow proportion of ODP | |
| Model | Parameter | Value |
|---|---|---|
| CNN | The size of kernels | 3 × 3 |
| Sliding window step | 1 | |
| Padding | 0 | |
| GRU | The number of neurons | 128 |
| Dropout rate | 0.2 | |
| Iteration rounds | 100 |
| Model Base | MAE | RMSE | R2 | ±3 min Accuracy | ±5 min Accuracy |
|---|---|---|---|---|---|
| LSTM | 2.82 | 5.33 | 0.75 | 0.71 | 0.84 |
| CNN-LSTM | 2.65 | 4.95 | 0.78 | 0.74 | 0.85 |
| GRU | 2.86 | 5.46 | 0.73 | 0.72 | 0.82 |
| CNN-GRU | 2.45 | 4.60 | 0.81 | 0.75 | 0.88 |
| Model Base | MAE | RMSE | R2 | ±3 min Accuracy | ±5 min Accuracy |
|---|---|---|---|---|---|
| LSTM | 2.75 | 5.04 | 0.73 | 0.63 | 0.79 |
| CNN-LSTM | 2.54 | 4.68 | 0.77 | 0.66 | 0.81 |
| GRU | 2.71 | 4.62 | 0.74 | 0.63 | 0.76 |
| CNN-GRU | 2.48 | 4.42 | 0.79 | 0.69 | 0.87 |
| ODP | MAE | RMSE | R2 | ±3 min Accuracy | ±5 min Accuracy |
|---|---|---|---|---|---|
| 16-35R | 2.45 | 4.60 | 0.81 | 0.75 | 0.88 |
| 16-17L | 2.40 | 4.66 | 0.82 | 0.73 | 0.87 |
| 16-16R | 2.69 | 5.32 | 0.77 | 0.68 | 0.81 |
| 16-34L | 2.58 | 5.29 | 0.78 | 0.70 | 0.82 |
| 1-35R | 2.48 | 4.42 | 0.79 | 0.69 | 0.87 |
| 1-17L | 2.54 | 4.52 | 0.80 | 0.67 | 0.85 |
| 1-16R | 2.29 | 4.39 | 0.80 | 0.74 | 0.87 |
| 1-34L | 2.32 | 4.35 | 0.82 | 0.76 | 0.89 |
| Features Removed | MAE | RMSE | R2 | ±3 min Accuracy | ±5 min Accuracy |
|---|---|---|---|---|---|
| None | 2.45 | 4.60 | 0.81 | 0.75 | 0.88 |
| Airline category | 2.47 | 4.66 | 0.80 | 0.71 | 0.86 |
| Aircraft category | 2.48 | 4.63 | 0.79 | 0.71 | 0.85 |
| Restricted status category | 2.48 | 4.69 | 0.79 | 0.70 | 0.87 |
| Normal features of scene traffic flow | 2.66 | 4.81 | 0.77 | 0.66 | 0.81 |
| Structure-related features | 2.58 | 4.78 | 0.78 | 0.68 | 0.82 |
| Corridor departure flow | 2.52 | 4.75 | 0.79 | 0.69 | 0.85 |
| Departure flow proportion of ODP | 2.49 | 4.70 | 0.79 | 0.73 | 0.86 |
| Features Removed | MAE | RMSE | R2 | ±3 min Accuracy | ±5 min Accuracy |
|---|---|---|---|---|---|
| None | 2.48 | 4.42 | 0.79 | 0.69 | 0.87 |
| Airline category | 2.48 | 4.53 | 0.78 | 0.66 | 0.86 |
| Aircraft category | 2.50 | 4.56 | 0.77 | 0.67 | 0.85 |
| Restricted status category | 2.49 | 4.61 | 0.77 | 0.63 | 0.85 |
| Normal features of scene traffic flow | 2.71 | 4.72 | 0.75 | 0.60 | 0.81 |
| Structure-related features | 2.64 | 4.68 | 0.77 | 0.63 | 0.83 |
| Corridor departure flow | 2.60 | 4.63 | 0.77 | 0.65 | 0.84 |
| Departure flow proportion of ODP | 2.57 | 4.61 | 0.78 | 0.68 | 0.85 |
| Time Slice | MAE | RMSE | R2 | ±3 min Accuracy | ±5 min Accuracy |
|---|---|---|---|---|---|
| 30 min | 2.45 | 5.07 | 0.80 | 0.72 | 0.85 |
| 45 min | 2.62 | 5.00 | 0.80 | 0.72 | 0.84 |
| 60 min | 2.45 | 4.60 | 0.81 | 0.75 | 0.88 |
| 75 min | 2.86 | 5.29 | 0.78 | 0.71 | 0.84 |
| 90 min | 2.89 | 5.39 | 0.74 | 0.72 | 0.83 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, L.; Liu, J.; Chen, H.; Fang, D.; Chen, W. A CNN-GRU Hybrid Model for Predicting Airport Departure Taxiing Time. Aerospace 2024, 11, 261. https://doi.org/10.3390/aerospace11040261
Yuan L, Liu J, Chen H, Fang D, Chen W. A CNN-GRU Hybrid Model for Predicting Airport Departure Taxiing Time. Aerospace. 2024; 11(4):261. https://doi.org/10.3390/aerospace11040261
Chicago/Turabian StyleYuan, Ligang, Jing Liu, Haiyan Chen, Daoming Fang, and Wenlu Chen. 2024. "A CNN-GRU Hybrid Model for Predicting Airport Departure Taxiing Time" Aerospace 11, no. 4: 261. https://doi.org/10.3390/aerospace11040261