1. Introduction
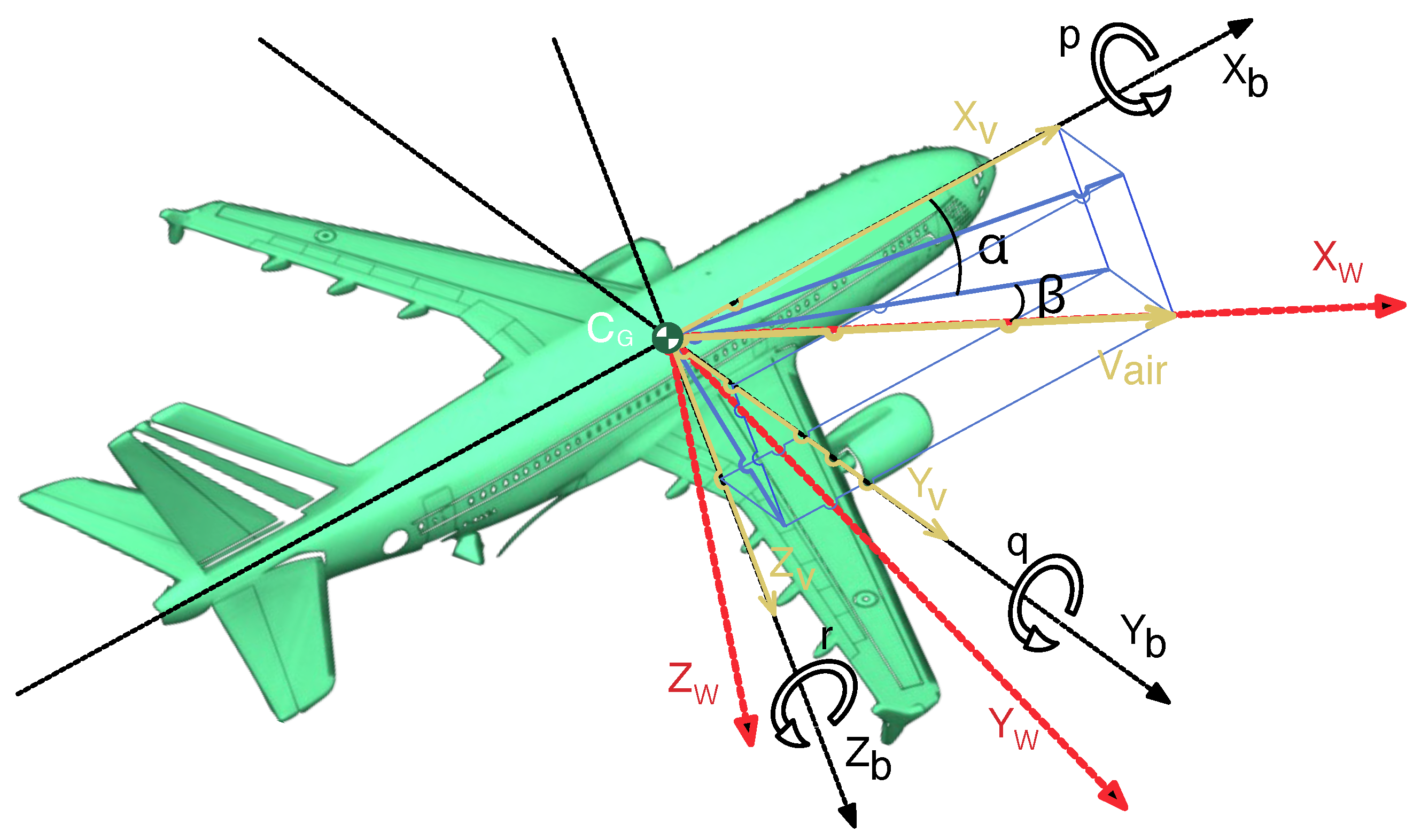
Piloting a modern aircraft, including of crewed, remotely piloted, and fully autonomous types, relies on automatic control systems to insure robust stability and high performance under a wide variety of conditions. Robust stability, often measured by phase and gain margin, is a closed-loop concept that quantifies the ability of a feedback control system to remain stable in the presence of uncertainties, both in the mathematical model and in cases of unexpected changes in the external environmental conditions. The level of performance required is application-specific and often measured in terms of rise time, overshoots, settling time, and other time-domain performances. Many phases of flight, such as final approach with autonomous landing, demand that many variables representing the aircraft attitude state (e.g., aircraft body reference frame relative to a ground reference frame) and translational state (e.g., position and velocity relative to the ground) are controlled simultaneously. The level of complexity of any model-based control system design process coupled with the ability to guarantee robust stability and the requisite closed-loop performance depends on an accurate mathematical aircraft model describing both the translational motion and the orientation. In general, the more closely the mathematical model reflects the specific aircraft and the environment it flies in (that is, the real world), the better the actively controlled closed loop system performance. Improvements in control system design methodologies stemming from the availability of accurate yet tractable mathematical models when combined with effective navigation systems directly contributes to safe, high-performance flight.
The classical mathematical model of the aircraft translation and orientation comprises fifteen non-linear differential equations [
1]. Many control system design methodologies employ linearized mathematical models based on Taylor series approximation of the fifteen non-linear differential equations about an equilibrium point representing a flight regime of interest. For example, it is a well known and often studied problem of providing a smooth flight of a passenger aircraft in the presence of wind turbulence. The mathematical model can be linearized using wing level; constant velocity flight condition and the feedback control system design based on linear mathematical models strive to keep the flight smooth and near that equilibrium condition. Large deviations from the equilibrium condition, say, due to an unexpected large wind shear, can move the aircraft out of the linear region and potentially lead to performance and stability issues. In a single flight, there are many flight regimes from take-off to landing represented by different equilibrium points. One of the extended solutions for this issue is the combination of different controllers with the same structure (i.e., gain scheduling) [
2].
This paper presents dynamic models for aircraft control design, which implies accurate models with suitable structures for optimizing the control design stage. One of the aims of this paper is to present a general modeling framework based on fuzzy logic for control design rather than linearization around various equilibrium points. This work explores ways to obtain a general fuzzy model of a fixed-wing aircraft using the sector non-linearity technique due to its proven ability to describe dynamic behavior in the field of non-linear systems (page 6 of [
3,
4,
5,
6]). The significant advantage of obtaining a fuzzy representation of the original aircraft dynamic model is the possibility to design controllers like parallel (PDC) and non-parallel (non-PDC) distributed compensation control laws [
5,
7,
8] using linear matrix inequality (LMI) optimization [
9]. These control algorithms guarantee stability conditions for a wide range of operation points and flight conditions using the same controller, avoiding the classical gain scheduling schemes where stability issues can be highly challenging.
The application of fuzzy logic in the field of aerospace applications has been inherent to the emergence of the first contributions in this area, as shown in [
10,
11,
12]. These earlier works explored the use of fuzzy logic as alternatives in control algorithms, state estimation or fault detection. Afterwards, several contributions have been presented where experimental data and clustering techniques have been combined with fuzzy logic for the identification of dynamic models (black-box type) and/or controllers. Some examples are [
13,
14,
15].
Since the use of fuzzy logic has provided satisfactory results almost from its first applications, it has been widely used in many different areas of the aerospace sector such as dynamic control in hyper-sonic aircraft surfaces [
16], health monitoring for aircraft engines [
17], autopilots for helicopters [
18] or soft sensors for angle-of-attack (AoA) estimation [
19,
20]. Furthermore, the application of fuzzy logic in novel areas of the aerospace sector, such as Unmanned Aerial Vehicles (UAVs) or Autonomous Underwater Vehicles (AUVs), is also currently an area of interest, as shown in [
21,
22,
23,
24,
25,
26].
The approach presented in this work is to define a global non-linear fuzzy model representing the global aircraft dynamics. In general, there are two approaches for constructing fuzzy models: (i) identification using input–output data (as mentioned before [
13,
14,
15,
27]), and (ii) derivation from given non-linear system equations. The proposed fuzzy modeling framework is focused on the second approach and uses the idea of
sector non-linearity. This method was introduced by Tanaka and Wang in (page 10 of [
3]), and it enables the formulation of an equivalent fuzzy model from an original non-linear system using linear subsystems. This approach has been addressed previously in the aerospace field, as shown, for example, in [
26,
28,
29].
The sector non-linearity technique is based on representing any static non-linear term of a model with a fuzzy quantity, where the jth rule is of the form
IF is
and … and
is
where
are the premise variables,
are the membership functions and
are constant values (zero-order model) or linear functions depending on state variables
(first-order model) of non-linear models. The premise variables are known functions which may depend on the state variables and/or time [
30].
In this paper, the main objective is to present a new version of the conventional fixed-wing aircraft dynamic model that uses fuzzy logic methods, in particular a way to obtain an equivalent and complete fuzzy model of such non-linear model. This is the main contribution of this work, which distinguishes it from other contributions such as [
28,
29], where the dynamics of the aircraft are only partially described (longitudinal model), the rotation matrices between the different axes are not included and simplifications are performed through the application of Taylor series to make the problem more solvable. For all these reasons, this article proposes a much more general framework that allows to obtain a global and complete model with a higher accuracy.
Finally, in future research, a Takagi–Sugeno fuzzy model (page 6 of [
3]) will be developed starting from the fuzzy model obtained in this manuscript. This Takagi–Sugeno model will be used to design non-linear TS fuzzy controllers. On the one hand, for a better understanding, the validation and examples of the proposed fuzzy modeling are performed using parameters of an Airbus A310 aircraft [
31].
This paper is organized as follows. In
Section 2, the classical aircraft dynamic model is presented, where the attitude dynamics are represented by quaternions.
Section 3 introduces the sector non-linearity technique for fuzzy modeling.
Section 4 provides the construction of the fuzzy model by selecting model limits and applying them in the dynamic model.
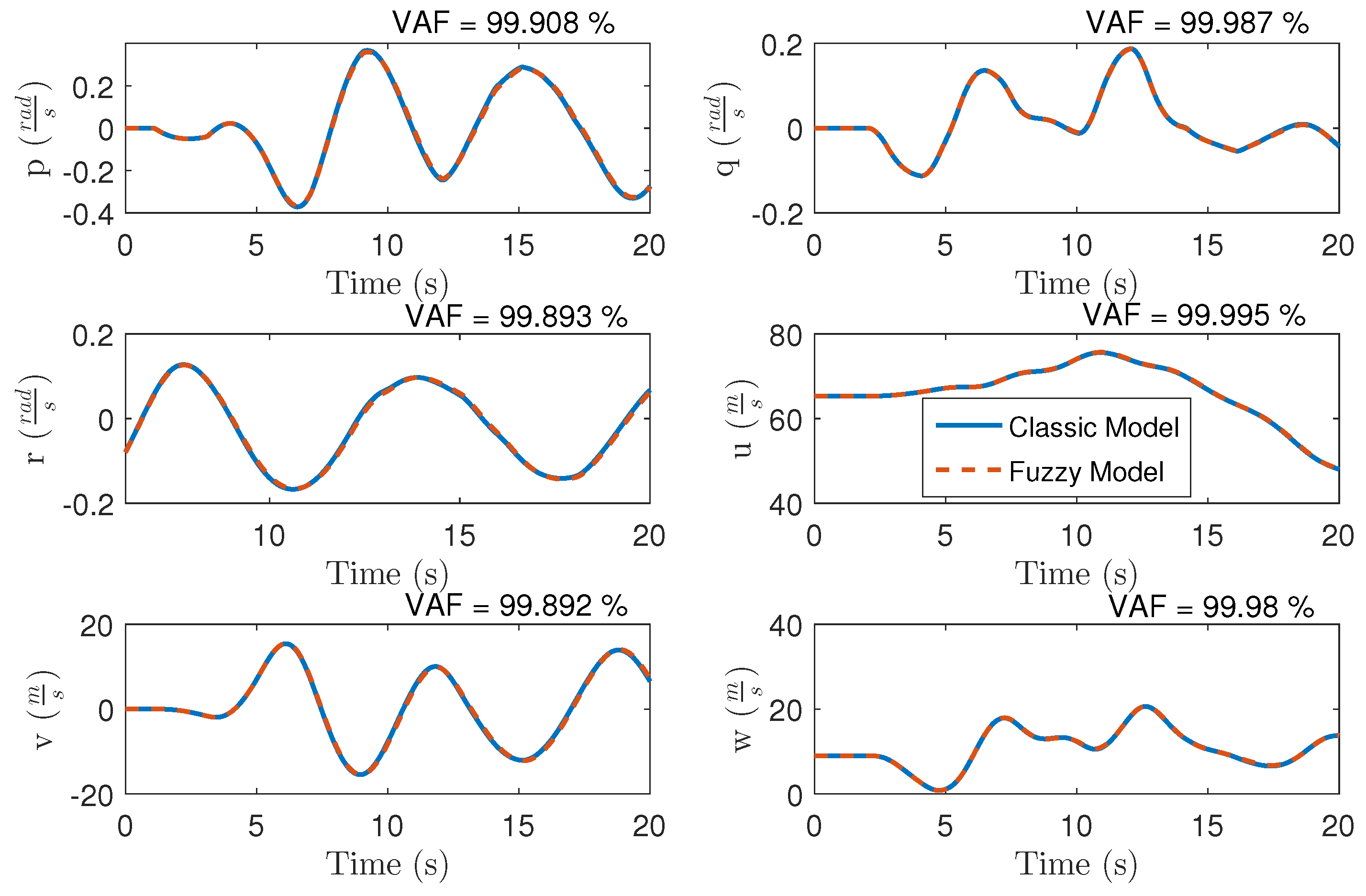
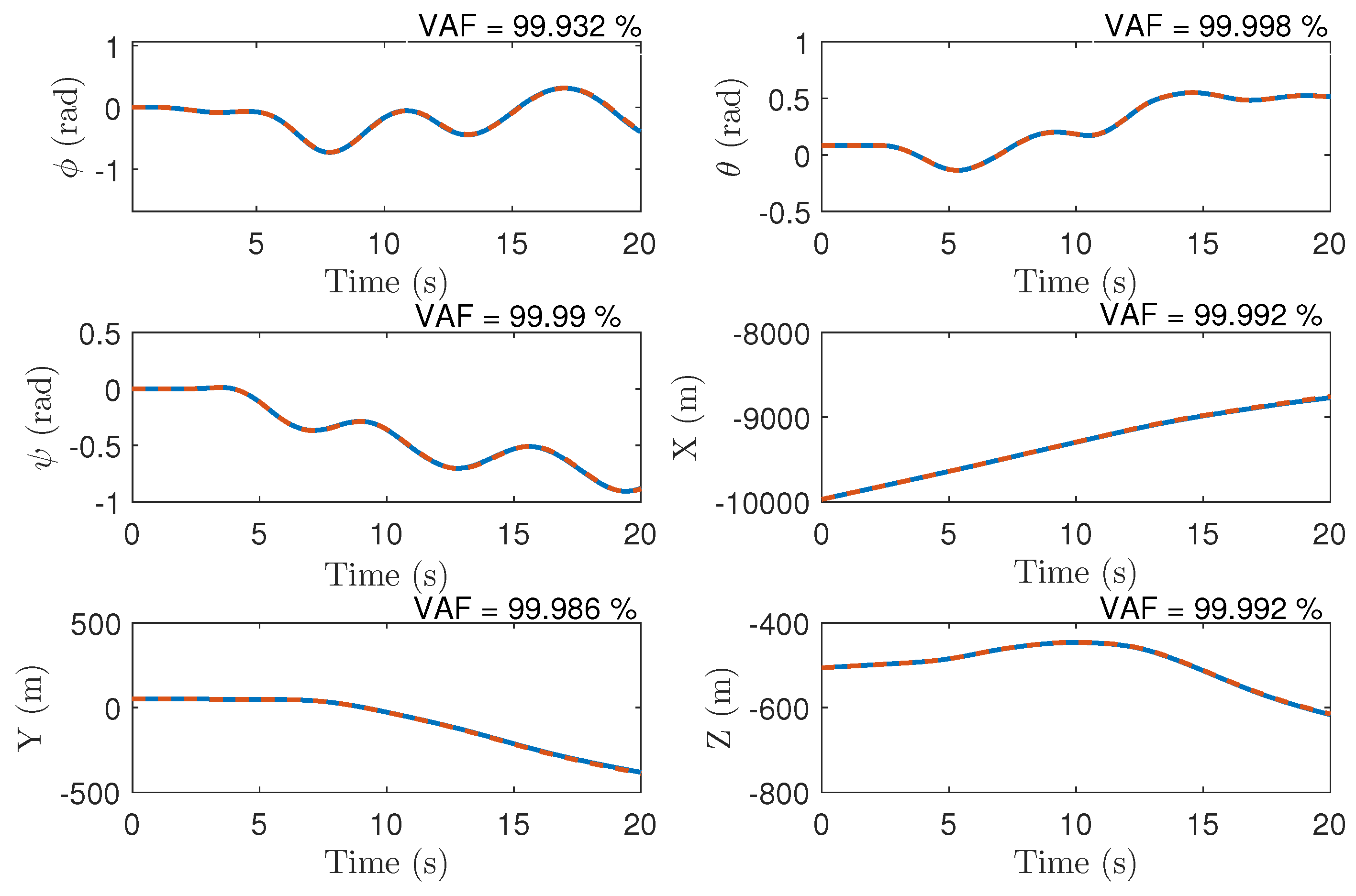
Section 5 presents simulation results and validation with the Onera non-linear model benchmark of A310 [
31].
Section 6 offers conclusions.
3. Sector Non-Linearity
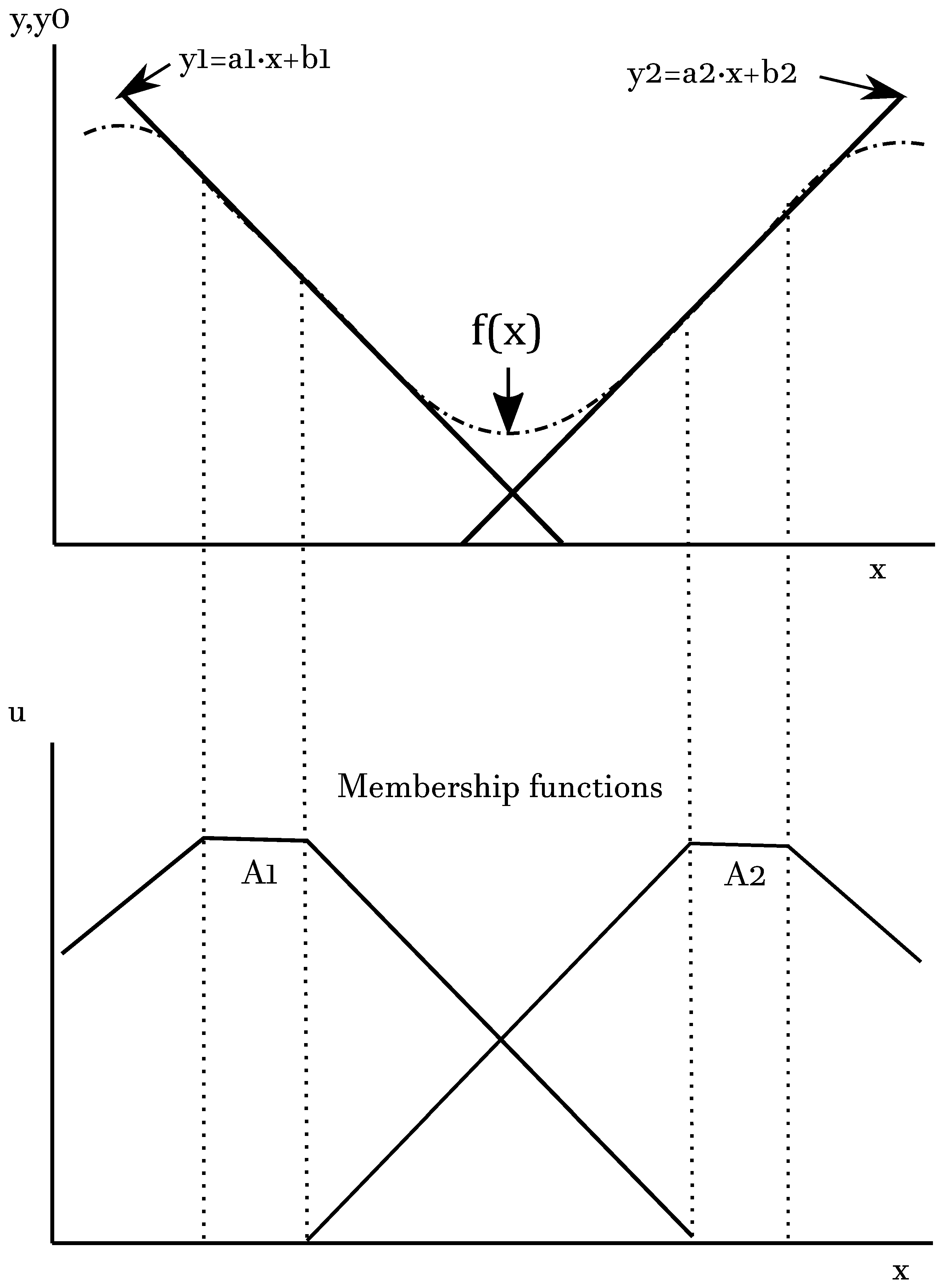
Sector non-linearity in fuzzy model construction appears in page 10 of [
3], and is based on the following idea. We consider a non-linear system with a static non-linear term defined by function
. The aim is to find the global sector such that
.
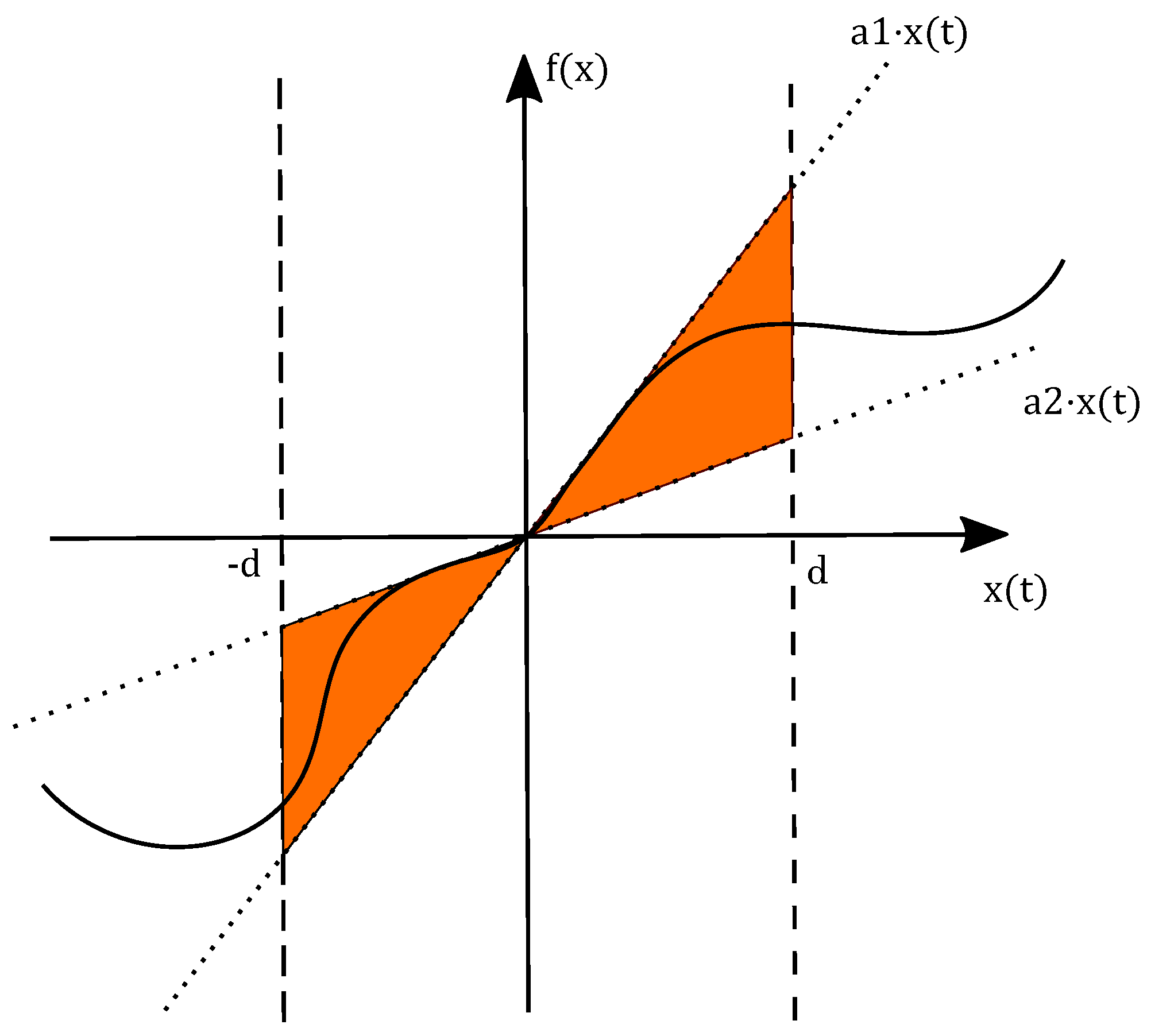
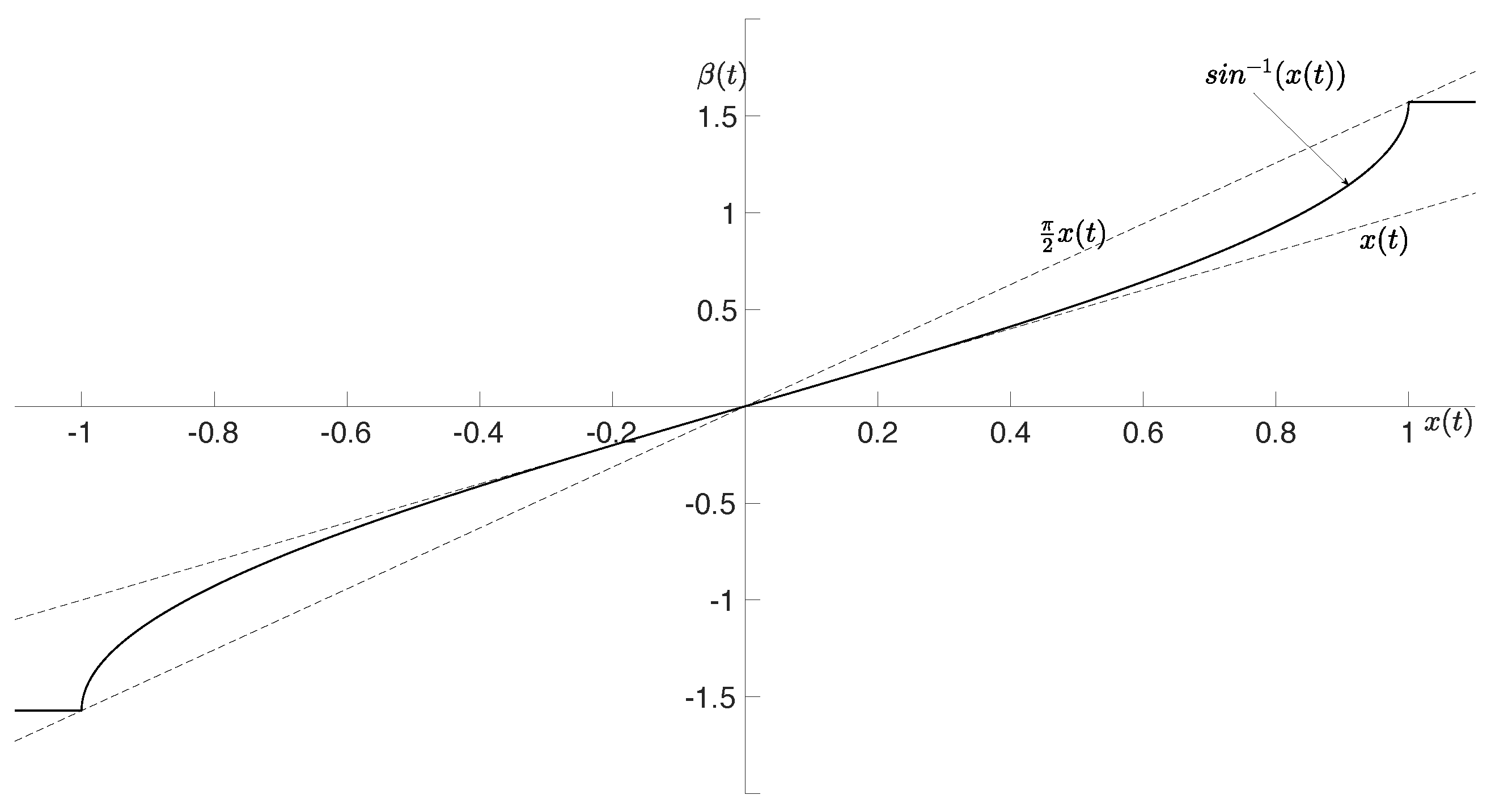
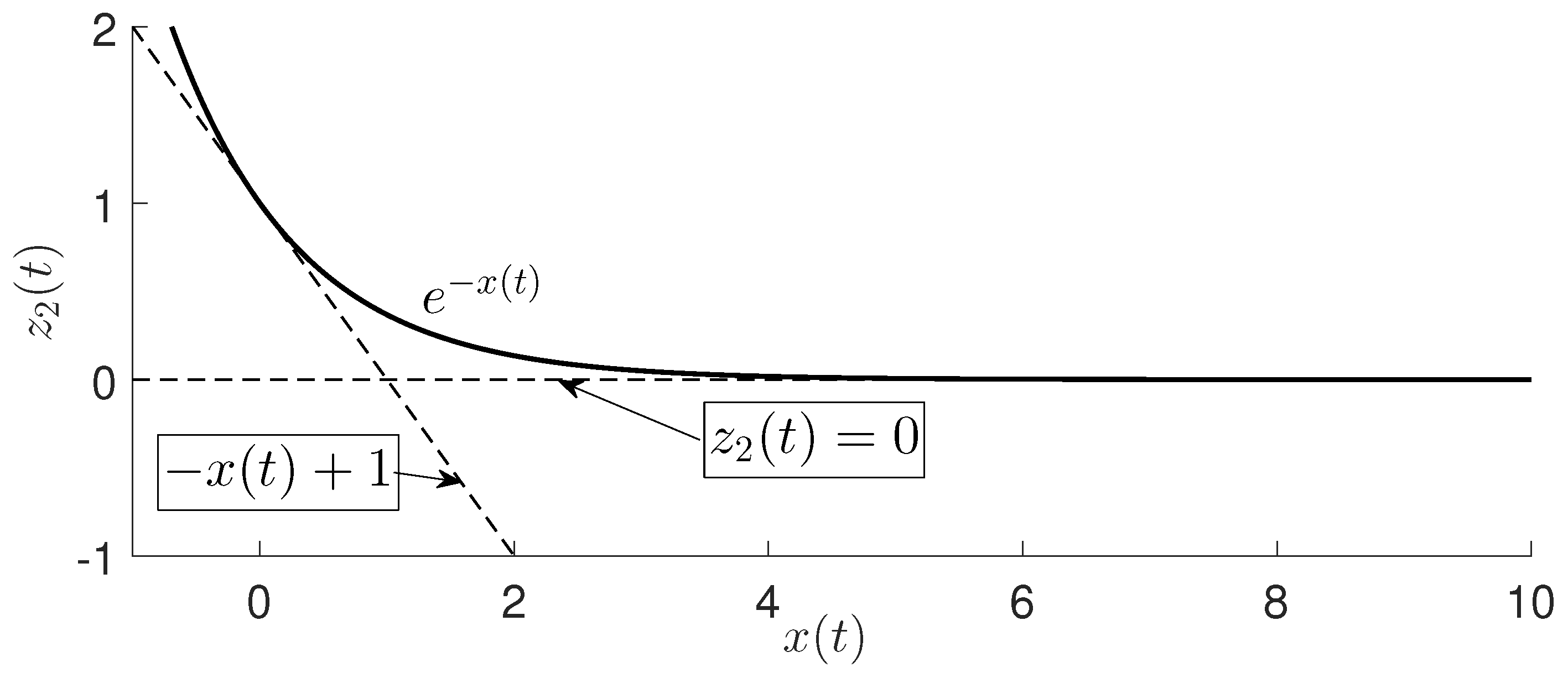
Figure 2 illustrates this approach. Sometimes it is difficult to find global sectors for general non-linear functions. In this case, we can consider a local sector non-linearity where two vertical lines become this local sector where
, and where
are the limits of variable
as illustrated in
Figure 3.
Therefore, it is necessary to establish numerical limits
of the variables to be approximated by the local sector non-linearity technique. In the case of a fixed-wing aircraft, those ranges include variables such as angle of attack, sideslip and airspeed. The information detailed in operational flight manuals or other technical information provided by aircraft designers [
34,
35] details the valid operational ranges as valuable sources to establish the particular value of limit
for each variable.
This approach is applied to obtain the fuzzy representation of static non-linear terms which appear in the model of fixed-wing aircraft according to Equation (
1).
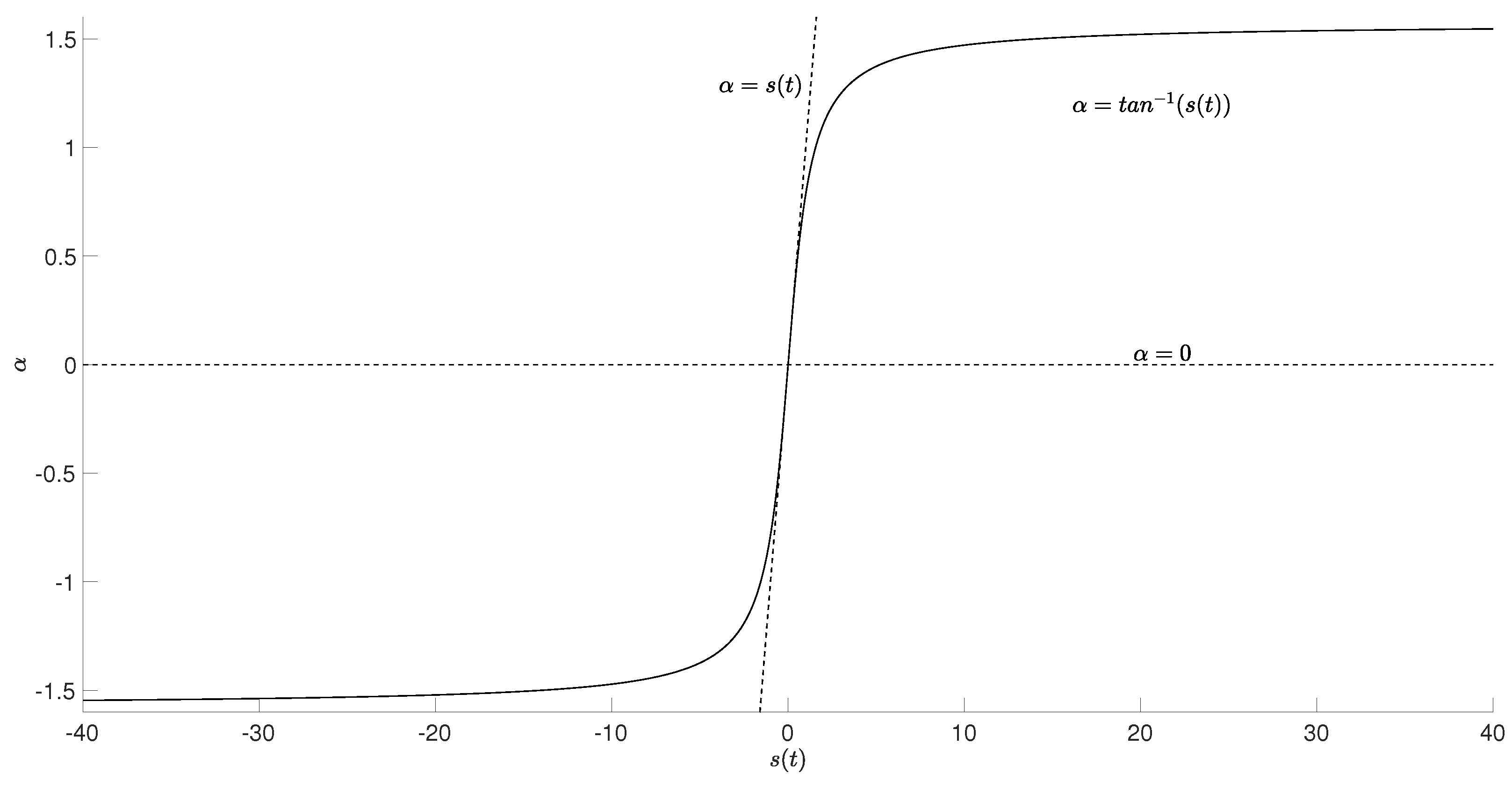
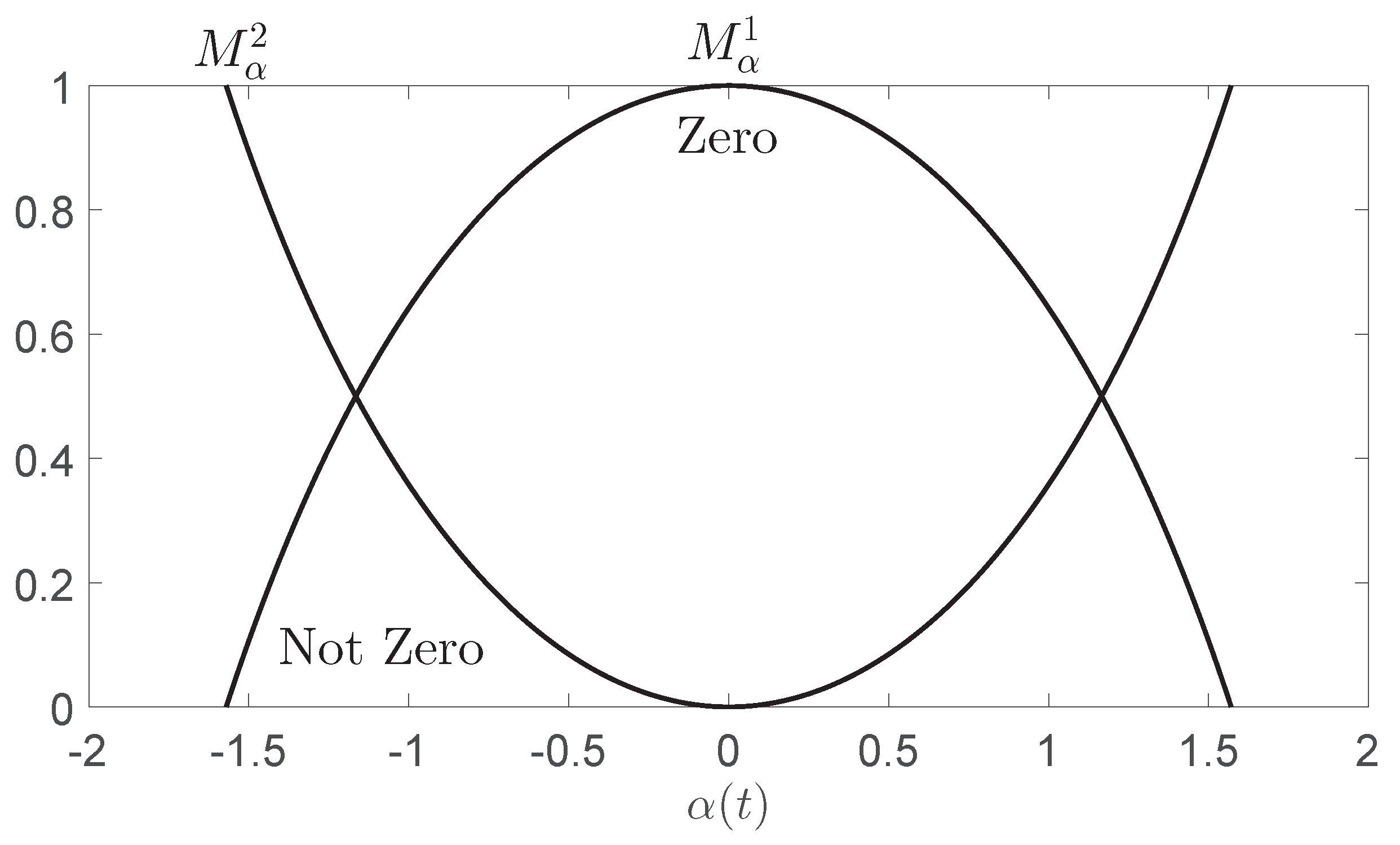
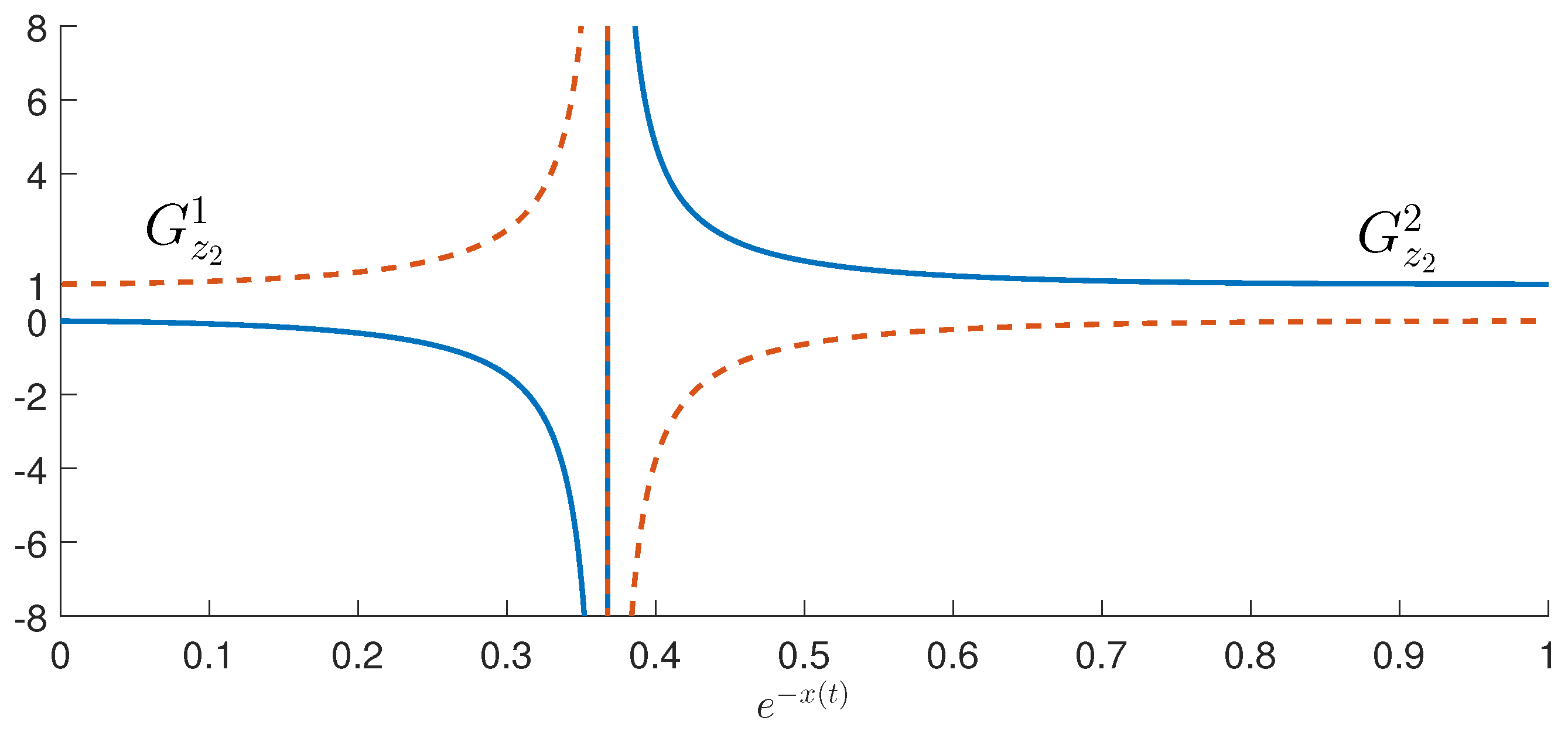
Example 1. The following non-linear function is the expression of angle-of-attack based on classic aircraft modeling: We obtain a fuzzy representation in two steps. In the first step, we deal with the equation between α and s. Figure 4 shows the graphical representation of where two bounds of the global sector might be . Therefore, based on these two simple sectors, can be represented using Equation (1) with two rules:where The and consequents are and 0; then, Moreover, is the reference variable of the fuzzy model. Note that the membership function is dependent on ; then, it is important to remark that in this function, . Therefore, the membership functions can be calculated as It should be noted that, in general, , but if this happens, we set and . For the rest of the paper, these membership functions are termed Type I.
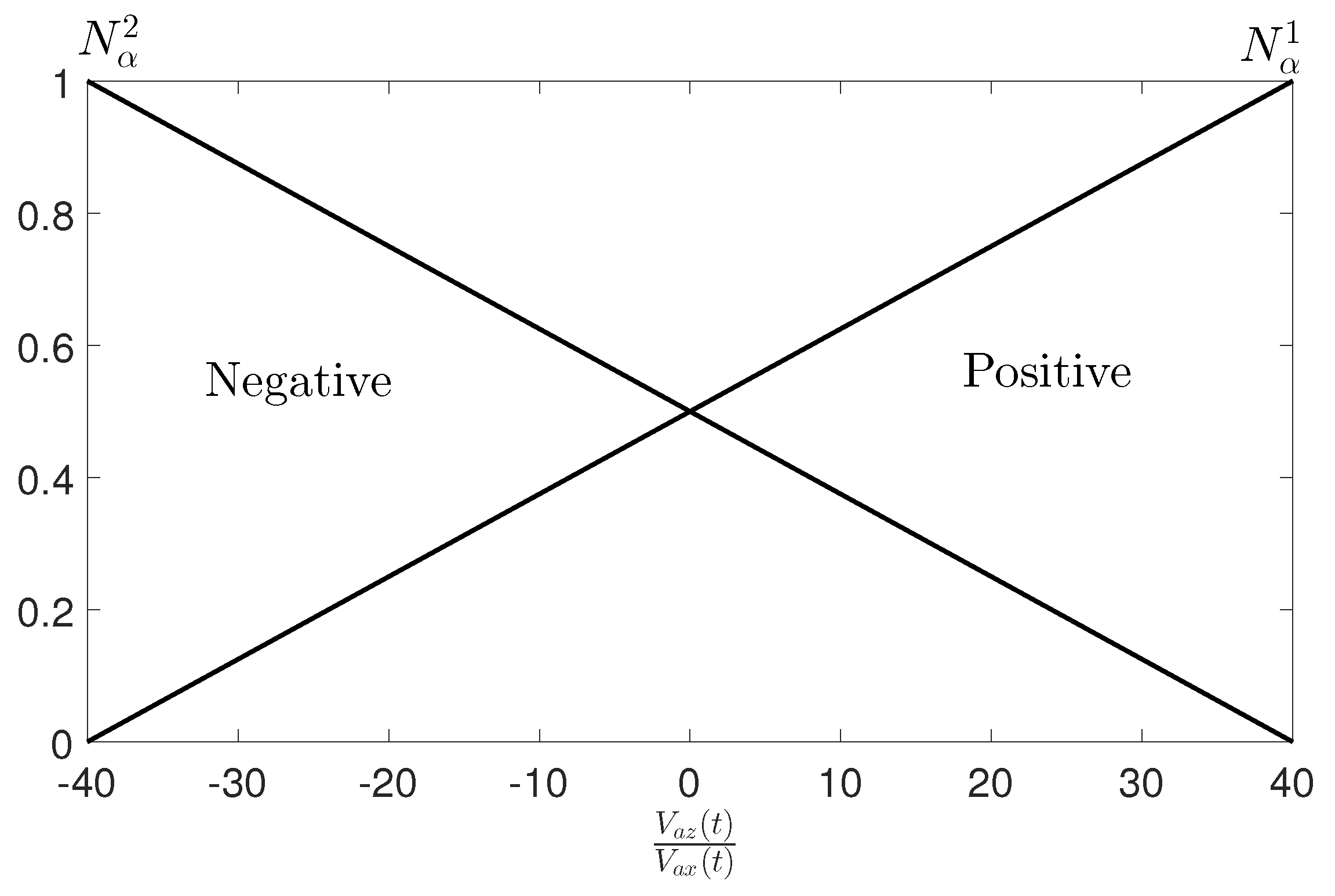
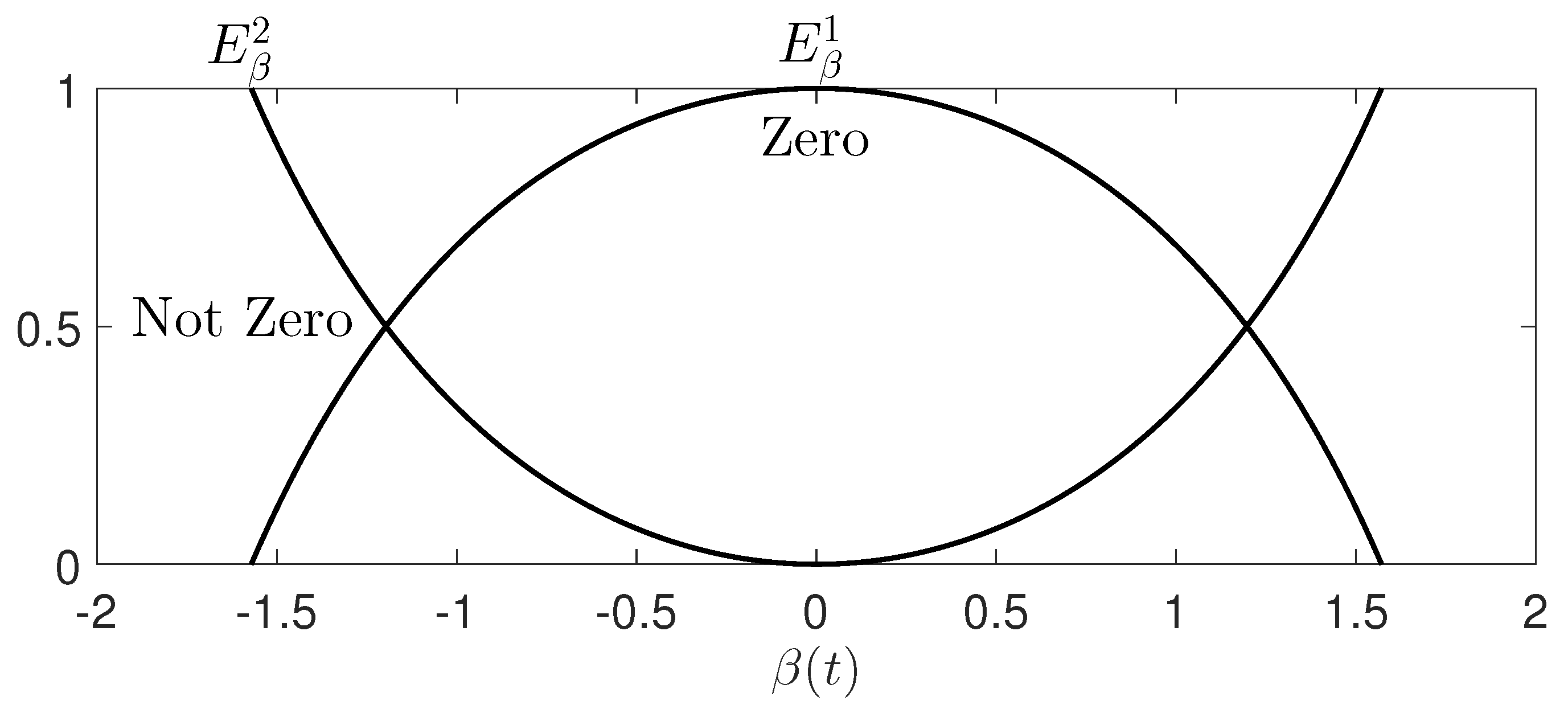
In the second step, we consider . In the angle-of-attack case, where and . In this non-linear case, the global sector cannot be defined, so a local sector isused instead, where the quotient is bounded by .
The reason for these limits is the same as that mentioned at the beginning of Example 1. The outcome of the local sector non-linearity is this fuzzy quantity with two rules:where membership functions are In this case, the and consequents are and ; then, All membership functions with this structure are defined as type IV and labelled as .
For representing the fuzzy model, the chosen value limits were . In fuzzy models, it is usual to name the membership functions as “Positive”, “Negative”, “Zero” and “Not Zero” (see Figure 5 and Figure 6). Finally, the fuzzy model for model has four rules after combining fuzzy Euantities (23) and (27), and it is presented in Table 1, where | = | | = | 40 |
| = | | = | |
| = | 0 | | |
| = | 0 | | |
The defuzzification is carried out aswhere , , , . This fuzzy model is of the zero order because all the consequents are constants. For further information regarding this example, see Example 3 in page 14 of [3]. 6. Conclusions and Future Works
A general framework for modelling fixed-wing aircraft using fuzzy structures and sector non-linearity techniques is proposed. The main contribution the obtention of a more general and accurate non-linear model than other alternatives proposed in the existing literature, such as [
28,
29]. Moreover, the approach presented allows for the expression of aerodynamic coefficients, moments, forces and wind effects, all of them expressed in terms of fuzzy logic and the body frame. This is possible thanks to the capability of the global and local sector non-linearity technique to approximate non-linear terms with fuzzy logic rules and with the same accuracy as the original non-linear model. In addition, the proposed quaternions form contributes to the good performance of the fuzzy logic model by removing discontinuities and more complex trigonometric functions. However, the good mathematical performance of the quaternions has the negative effect of losing the physical concept of comparing the Euler angles. Nevertheless, it is possible to find an equivalent Euler representation from quaternions.
The main limitation of obtaining the equivalent fuzzy model is the requirement to limit the maximum and minimum values for some of the system variables. This is due to the application of the local sector non-linearity technique, as detailed in
Section 3 and
Section 4. However, this limitation is not extremely constraining in the case of a fixed-wing aircraft, as there is often a significant amount of information available (theoretical and experimental) from manufacturers and the research community on the limits of these variables.
A Matlab toolbox is implemented [
36] to simplify the application of this new approach for any standard fixed-wing aircraft defined by classical parameters such as geometry, mass, coefficients and bound conditions, where the outcome of the toolbox is a newly reformulated fuzzy model in terms of quaternions.
On the other hand, in
Section 5, using this Matlab toolbox, a fuzzy equivalent model for the Onera non-linear model benchmark of the A310 [
31] is obtained. Also, a comparison between the AIRBUS A310 model developed by ONERA and the obtained fuzzy model is performed. As a consequence, it is concluded that both models are equivalent.
The following research step consists of defining in terms of the Takagi–Sugeno structure (page 6 of [
3]) the fuzzy model obtained in this work. This representation is suitable for designing PDC and non-PDC fuzzy controllers using well-known methodologies based on linear matrix inequalities [
5,
6,
40].


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}