

Comparative Study of Soft In-Plane and Stiff In-Plane Tiltrotor Blade Aerodynamics in Conversion Flight, Using CFD-CSD Coupling Approach

Abstract
:1. Introduction
2. Numerical Simulation Method
2.1. The Geometry, Structure, and Grid
2.2. The CFD Method
2.3. The CSD Method
2.4. The CFD-CSD Coupling Method
3. Verification of Simulation Method
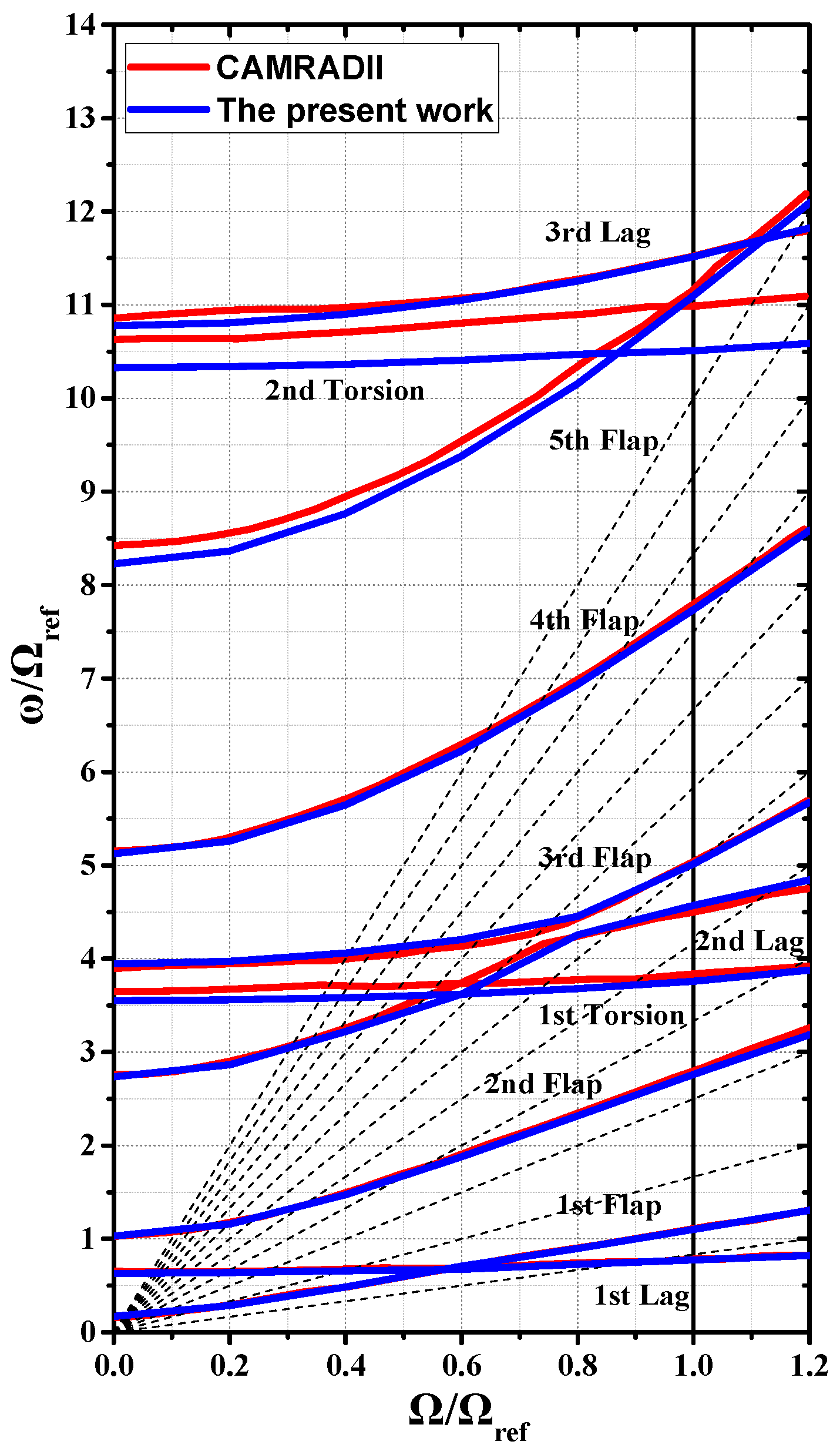
3.1. Verification of Structural Characteristic Calculation
3.2. Verification of the CFD-CSD Coupling Method
3.3. Verification of Grid Independence
4. Discussion and Results
4.1. Analysis of Structural Characteristics
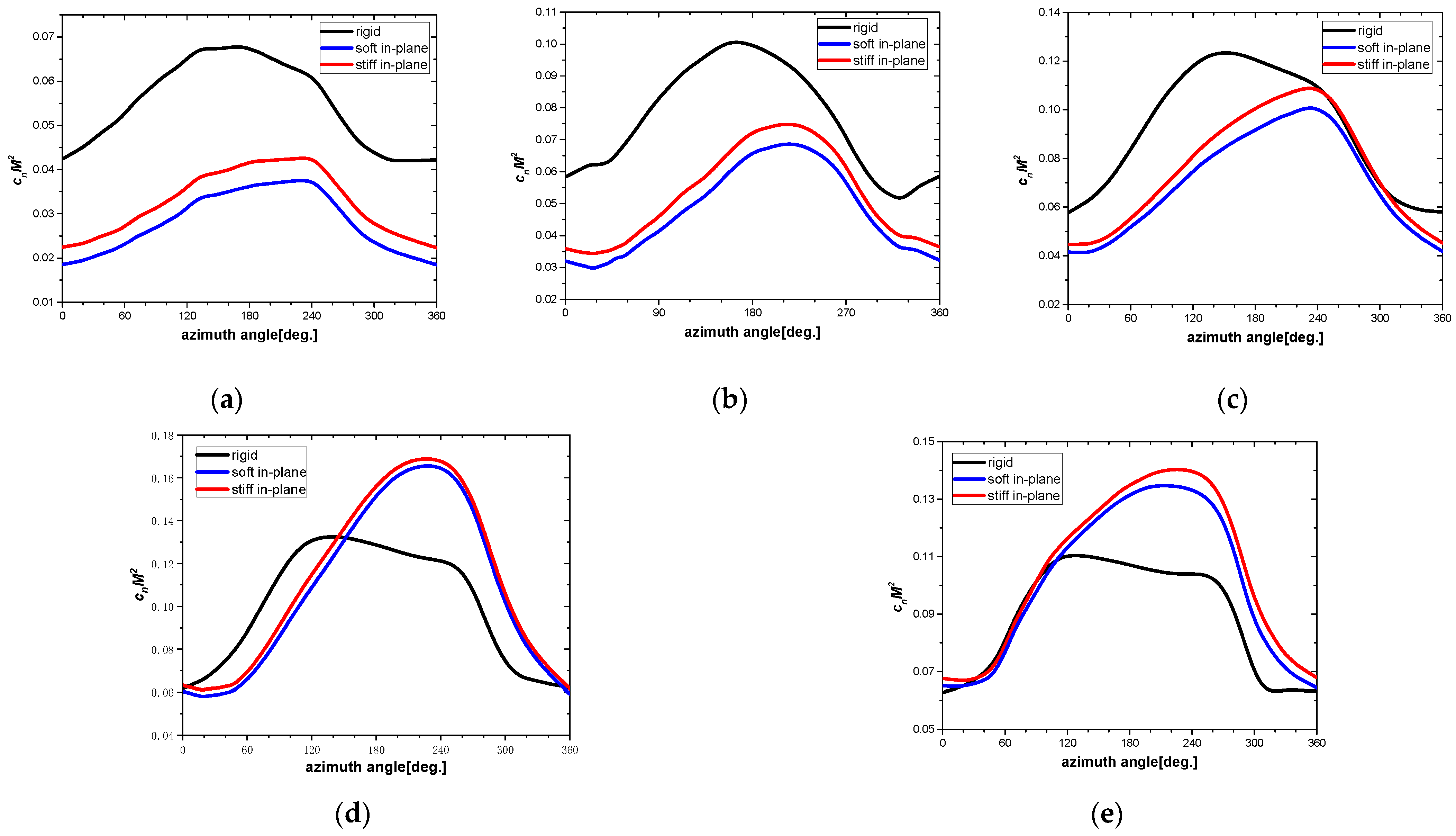
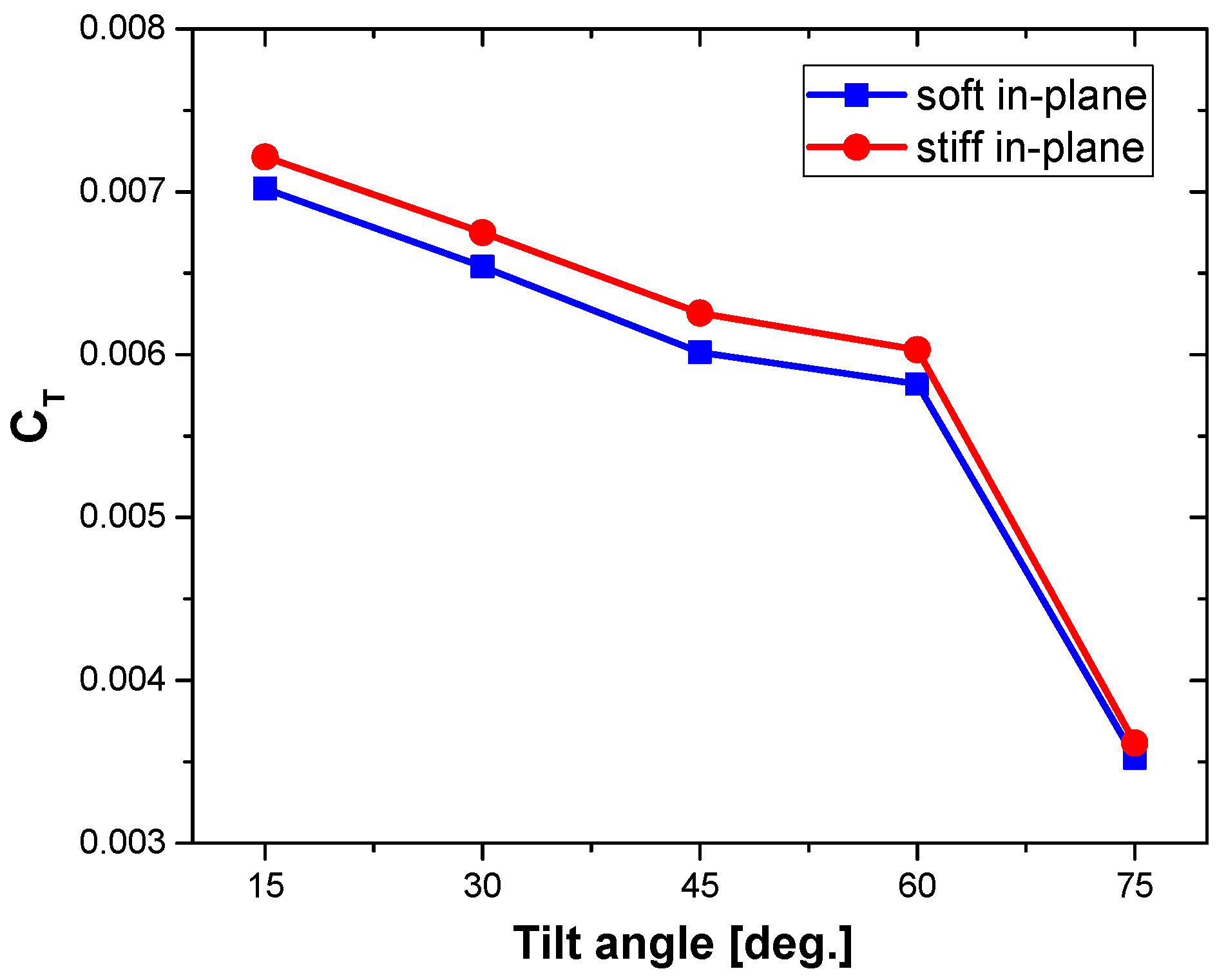
4.2. Influence of Tilt Angle on Aerodynamic Characteristics of Soft In-Plane and Stiff In-Plane Blades
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, H. Numerical Calculations on the Unsteady Aerodynamic Force of the Tilt-Rotor Aircraft in Conversion Mode. Int. J. Aerosp. Eng. 2019, 2019, 1–15. [Google Scholar] [CrossRef]
- Li, P.; Zhao, Q.; Zhu, Q. CFD calculations on the unsteady aerodynamic characteristics of a tilt-rotor in a conversion mode. Chin. J. Aeronaut. 2015, 28, 1593–1605. [Google Scholar] [CrossRef]
- Friedmann, P.P.; Yuan, K.-A.; de Terlizzi, M. An Aeroelastic Model for Composite Rotor Blades with Straight and Swept Tips. Part I: Aeroelastic Stability in Hover. Int. J. Non-Linear Mech. 2002, 37, 967–986. [Google Scholar] [CrossRef]
- Bilger, J.M.; Marr, R.; Zahedi, A. In-flight structural dynamic characteristics of the XV-15 tilt-rotorresearch aircraft. J. Aircr. 1982, 19, 1005–1011. [Google Scholar] [CrossRef]
- Bilger, J.M.; Marr, R.L.; Zahedi, A. Results of Structural Dynamic Testing of the Xv-15 Tilt Rotor Research Aircraft. In Proceedings of the 37th Annual Forum of the American Helicopter Society, New Orleans, LA, USA, 17–20 May 1981. [Google Scholar]
- Haixu, L.; Xiangju, Q.; Weijun, W. Multi-body Motion Modeling and Simulation for Tilt Rotor Aircraft. Chin. J. Aeronaut. 2010, 23, 415–422. [Google Scholar] [CrossRef]
- Li, Z.; Xia, P. Aeroelastic modelling and stability analysis of tiltrotor aircraft in conversion flight. Aeronaut. J. 2018, 122, 1606–1629. [Google Scholar] [CrossRef]
- Friedmann, P.P.; Glaz, B.; Palacios, R. A moderate deflection composite helicopter rotor blade model with an improved cross-sectional analysis. Int. J. Solids Struct. 2009, 46, 2186–2200. [Google Scholar] [CrossRef]
- Shahverdi, H.; Nobari, A.; Behbahani-Nejad, M.; Haddadpour, H. Aeroelastic analysis of helicopter rotor blade in hover using an efficient reduced-order aerodynamic model. J. Fluids Struct. 2009, 25, 1243–1257. [Google Scholar] [CrossRef]
- Corle, E.; Floros, M.; Schmitz, S. On the Influence of Inflow Model Selection for Time-Domain Tiltrotor Aeroelastic Analysis. J. Am. Helicopter Soc. 2021, 66, 1–12. [Google Scholar] [CrossRef]
- Dodic, M.; Krstic, B.; Rasuo, B.; Dinulovic, M.; Bengin, A. Numerical Analysis of Glauert Inflow Formula for Single-Rotor Helicopter in Steady-Level Flight below Stall-Flutter Limit. Aerospace 2023, 10, 238. [Google Scholar] [CrossRef]
- Masarati, P.; Piatak, D.J.; Quaranta, G.; Singleton, J.D.; Shen, J. Soft-Inplane Tiltrotor Aeromechanics Investigation Using Two Comprehensive Multibody Solvers. J. Am. Helicopter Soc. 2008, 53, 179–192. [Google Scholar] [CrossRef]
- Bernardini, G.; Serafini, J.; Colella, M.M.; Gennaretti, M. Analysis of a structural-aerodynamic fully-coupled formulation for aeroelastic response of rotorcraft. Aerosp. Sci. Technol. 2013, 29, 175–184. [Google Scholar] [CrossRef]
- Ho, J.C.; Yeo, H. Assessment of comprehensive analysis predictions of helicopter rotor blade loads in forward flight. J. Fluids Struct. 2017, 68, 194–223. [Google Scholar] [CrossRef]
- Hu, Z.; Xu, G.; Shi, Y. A robust overset assembly method for multiple overlapping bodies. Int. J. Numer. Methods Fluids 2020, 93, 653–682. [Google Scholar] [CrossRef]
- Bauchau, O.; Ahmad, J. Advanced Cfd and Csd Methods for Multidisciplinary Applications in Rotorcraft Problems. In Proceedings of the 6th Symposium on Multidisciplinary Analysis and Optimization, Bellevue, WA, USA, 4–6 September 1996. [Google Scholar]
- Romani, G.; Casalino, D. Rotorcraft blade-vortex interaction noise prediction using the Lattice-Boltzmann method. Aerosp. Sci. Technol. 2019, 88, 147–157. [Google Scholar] [CrossRef]
- Lim, J. Consideration of structural constraints in passive rotor blade design for improved performance. Aeronaut. J. 2016, 120, 1604–1631. [Google Scholar] [CrossRef]
- Yu, P.; Hu, Z.; Xu, G.; Shi, Y. Numerical Simulation of Tiltrotor Flow Field during Shipboard Take-Off and Landing Based on CFD-CSD Coupling. Aerospace 2022, 9, 261. [Google Scholar] [CrossRef]
- Tung, C.; Caradonna, F.X.; Johnson, W.R. The Prediction of Transonic Flows on an Advancing Rotor. In Proceedings of the 40th Annual Forum of the American Helicopter Society, Arlington, VA, USA, 16–18 May 1984. [Google Scholar]
- Felker, F.F.; Young, L.A.; Signor, D.B. Performance and Loads Data from a Hover Test of a Full-Scale Advanced Technology Xv-15 Rotor; NASA: Columbia, DC, USA, 1986.
- Potsdam, M.A.; Strawn, R.C. CFD Simulations of Tiltrotor Configurations in Hover. J. Am. Helicopter Soc. 2005, 50, 82–94. [Google Scholar] [CrossRef]
- Ye, Z.; Zhan, F.; Xu, G. Numerical Research on the Unsteady Evolution Characteristics of Blade Tip Vortex for Helicopter Rotor in Forward Flight. Int. J. Aeronaut. Space Sci. 2020, 21, 865–878. [Google Scholar] [CrossRef]
- Jameson, A.; Schmidt, W.; Turkel, E. Numerical Solution of the Euler Equations by Finite Volume Methods Using Runge Kutta Time Stepping Schemes. In Proceedings of the 14th Fluid and Plasma Dynamics Conference, Palo Alto, CA, USA, 23–25 June 1981. [Google Scholar]
- Yoon, S.; Jameson, A. Lower-upper Symmetric-Gauss-Seidel method for the Euler and Navier-Stokes equations. AIAA J. 1988, 26, 1025–1026. [Google Scholar] [CrossRef]
- Xing, Y.; Zhang, H.; Wang, Z. Highly precise time integration method for linear structural dynamic analysis. Int. J. Numer. Methods Eng. 2018, 116, 505–529. [Google Scholar] [CrossRef]
- Hirt, C.; Amsden, A.; Cook, J. An arbitrary Lagrangian-Eulerian computing method for all flow speeds. J. Comput. Phys. 1972, 14, 227–253. [Google Scholar] [CrossRef]
- Smith, M.J.; Lim, J.W.; van der Wall, B.G.; Baeder, J.D.; Biedron, R.T., Jr.; Boyd, D.D.; Jayaraman, B.; Jung, S.N.; Min, B.-Y. An Assessment of Cfd/Csd Prediction State-of-the-Art Using the Hart Ii International Workshop Data. In Proceedings of the American Helicopter Society 68th Annual Forum, Ft. Worth, TX, USA, 1–3 May 2012. [Google Scholar]
- Wayne, J. Development of a Comprehensive Analysis for Rotorcraft. I-Rotor Model and Wake Analysis. Vertica 1981, 5, 19. [Google Scholar]
- Yuan, W.; Sandhu, R.; Poirel, D. Fully Coupled Aeroelastic Analyses of Wing Flutter towards Application to Complex Aircraft Configurations. J. Aerosp. Eng. 2021, 34, 04020117. [Google Scholar] [CrossRef]
- Giavotto, V.; Borri, M.; Mantegazza, P.; Ghiringhelli, G.; Carmaschi, V.; Maffioli, G.; Mussi, F. Anisotropic beam theory and applications. Comput. Struct. 1983, 16, 403–413. [Google Scholar] [CrossRef]
- Yuan, K.A.; Friedmann, P.P. Aeroelasticity and Structural Optimization of Composite Helicopter Rotor Blades with Swept Tips; NASA-CR-4665; NASA: Columbia, DC, USA, 1995.
- Igorevich, A.V. Mathematical Methods of Classical Mechanics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 60. [Google Scholar]
- Smith, E.C.; Chopra, I. Aeroelastic Response, Loads, and Stability of a Composite Rotor in Forward Flight. AIAA J. 1993, 31, 1265–1273. [Google Scholar] [CrossRef]
- Hodges, D.H. Review of Composite Rotor Blade Modeling. AIAA J. 1990, 28, 561–565. [Google Scholar] [CrossRef]
- van der Wall, B.G.; Burley, C.L.; Yu, Y.; Richard, H.; Pengel, K.; Beaumier, P. The HART II test—Measurement of helicopter rotor wakes. Aerosp. Sci. Technol. 2004, 8, 273–284. [Google Scholar] [CrossRef]
- Yeo, H.; Potsdam, M. Rotor Structural Loads Analysis Using Coupled Computational Fluid Dynamics/Computational Structural Dynamics. J. Aircr. 2016, 53, 87–105. [Google Scholar] [CrossRef]
- Hu, Z.; Xu, G.; Shi, Y.; Xia, R. Airfoil–Vortex Interaction Noise Control Mechanism Based on Active Flap Control. J. Aerosp. Eng. 2022, 35, 04021111. [Google Scholar] [CrossRef]
- Xia, R.; Hu, Z.; Shi, Y.; Xu, G. Parameter Analysis of Active Flap Control for Rotor Aerodynamic Control and Design. Int. J. Aerosp. Eng. 2023, 2023, 1–24. [Google Scholar] [CrossRef]
- Shi, Y.; Xu, Y.; Zong, K.; Xu, G. An investigation of coupling ship/rotor flowfield using steady and unsteady rotor methods. Eng. Appl. Comput. Fluid Mech. 2017, 11, 417–434. [Google Scholar] [CrossRef]
- Shi, Y.; He, X.; Xu, Y.; Xu, G. Numerical study on flow control of ship airwake and rotor airload during helicopter shipboard landing. Chin. J. Aeronaut. 2019, 32, 324–336. [Google Scholar] [CrossRef]
- Liu, Y.; Anusonti-Inthra, P.; Diskin, B. Development and Validation of a Multidisciplinary Tool for Accurate and Efficient Rotorcraft Noise Prediction; NASA: Columbia, DC, USA, 2011.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid | Blade Mesh | Refined Background | Big Background | Wing | Total Number |
|---|---|---|---|---|---|
| Coarse | 1,091,516 × 6 | 364,948 | 2,644,824 | 1,091,516 | 10,539,064 |
| Baseline | 1,875,398 × 6 | 8,551,872 | 4,506,088 | 1,849,286 | 28,347,766 |
| Fine | 4,258,256 × 6 | 15,918,672 | 12,933,468 | 3,872,428 | 58,274,098 |
| Blade | EA (m) | EIηη (Nm2) | EIζζ (Nm2) | GJ (Nm2) | ωv |
|---|---|---|---|---|---|
| Soft in-plane blade | 1.17 × 107 | 4.44 × 105 | 1.17 × 104 | 3.90 × 105 | 0.72548 |
| Stiff in-plane blade | 1.17 × 107 | 4.44 × 105 | 1.06 × 104 | 3.90 × 105 | 1.22594 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Z.; Yu, P.; Xu, G.; Shi, Y.; Gu, F.; Zou, A. Comparative Study of Soft In-Plane and Stiff In-Plane Tiltrotor Blade Aerodynamics in Conversion Flight, Using CFD-CSD Coupling Approach. Aerospace 2024, 11, 77. https://doi.org/10.3390/aerospace11010077
Hu Z, Yu P, Xu G, Shi Y, Gu F, Zou A. Comparative Study of Soft In-Plane and Stiff In-Plane Tiltrotor Blade Aerodynamics in Conversion Flight, Using CFD-CSD Coupling Approach. Aerospace. 2024; 11(1):77. https://doi.org/10.3390/aerospace11010077
Chicago/Turabian StyleHu, Zhiyuan, Peng Yu, Guohua Xu, Yongjie Shi, Feng Gu, and Aijun Zou. 2024. "Comparative Study of Soft In-Plane and Stiff In-Plane Tiltrotor Blade Aerodynamics in Conversion Flight, Using CFD-CSD Coupling Approach" Aerospace 11, no. 1: 77. https://doi.org/10.3390/aerospace11010077