1. Introduction
High-precision pointing performance, i.e., pointing accuracy and pointing stability, is urgently needed for sensitive payloads boarding on spacecraft. For instance, the LISA (Laser Interferometer Space Antenna), which is dedicated to gravitational detection [
1,
2], imposes relative displacement precision with 10
[
3]. Aiming at detecting supermassive black-hole mergers and extreme mass ratio inspirals, the Chinese space mission Taiji requires position noise lower than 8
and acceleration noise lower than
[
4]. To control micro-vibrations transmitted from spacecraft platforms to sensitive payloads [
5], researchers and institutes propose passive, active, hybrid, and semi-active vibration control methods [
6,
7,
8,
9,
10]. Utilizing a flywheel actuator, Ref. [
11] investigated a novel active vibration suppression approach for flexible spacecraft during attitude maneuvering. Based on an NREDO (noise reduction extended disturbance observer), the controller designed in Ref. [
12] achieved the improved attitude stabilization performance of a flexible spacecraft. With the incorporation of a fuzzy disturbance observer and terminal sliding mode control strategy, the controller designed in Ref. [
13] outperformed a conventional controller in chattering reduction and fast convergence speed. The above methods can effectively decrease disturbances. However, it is beyond these methods’ ability to satisfy the vibration suppression requirements proposed by modern and future space missions. To deal with this challenge, a spacecraft configuration known as a DFP (disturbance-free payload) is proposed by Pedreiro [
14,
15]. In contrast with traditional spacecraft configuration, a sensitive payload in a DFP configuration is separated from the spacecraft platform. The resulting two parts, i.e., the SM (support module) and PM (payload module), are connected via a noncontact actuator. It is the noncontact design that provides the extremely high vibration isolation performance and, therefore, guarantees high-precision pointing performance for the sensitive payload. Recent studies concerning DFPs focused on precise dynamics building and control of the DFP system. With the incorporation of a bead model and the flexible dynamics of the support module, Ref. [
16] investigated the impact of umbilical and flexible dynamics on the pointing performance of the DFP system. Based on static and dynamic models of flexible cable, Ref. [
17] investigated the dynamic transmission characteristics of flexible cable. Ref. [
18] utilized the model predictive control method to reduce the collision probability between the payload module and support module. It is evident that the aforementioned DFP-related studies considered only the payload module.
In spite of the high-precision pointing performance, collaborative observation has received great attention. Observation satellites, such as Earth observation and solar observation satellites, put forward higher requirements in terms of spatial coverage and spatial resolution. The conventional observation mode, i.e., a single satellite, makes it difficult to conduct continuous observation [
19]. To meet the high-precision observation requirement, observation results obtained from different satellites, or results obtained from one satellite but at different times, are needed [
20]. It is obvious that the conventional observation mode is time-consuming and has a high cost. To tackle this problem, a satellite with multiple payloads is proposed and studied. Ref. [
21] introduced the
3Cat-1 project, whose main scope is to develop, construct, assemble, test and launch into Earth orbit a CubeSat with as many as seven different types of payloads. Through scientific experiments, the satellite demonstrated its capabilities as a cost-effective platform to conduct scientific experiments. Satellites launched by the Geostationary Operational Environmental Satellite-16 program carried two payloads [
22]. In addition, the O/OREOS (Organism/Organic Exposure to Orbital Stresses) nanosatellite completed a multi-payload technology demonstration [
23].
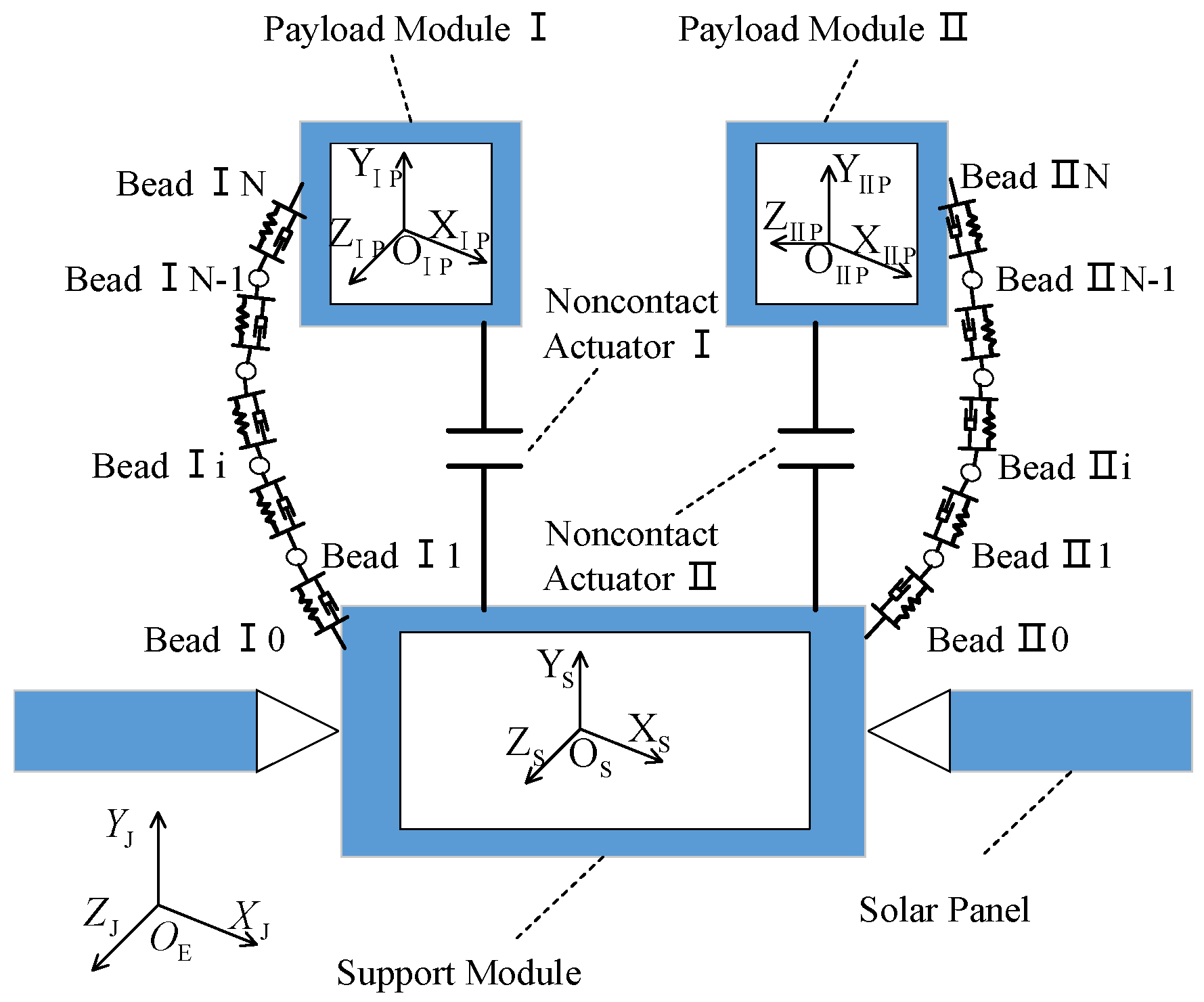
Although the conventional DFP configuration can provide a payload with high-precision pointing performance, the mode of a single payload greatly limits its multi-target detection capability. Multi-target detection might be a concern in future space missions. Moreover, to the best of the authors’ knowledge, this is the first attempt to investigate the collaborative observation capability of a DFP system.
This paper is dedicated to realizing the collaborative observation capability of a DFP system, and its main contributions lie in the following: (1) a novel DFP system that is potentially capable of collaborative observation is designed, and (2) the six-degrees-of-freedom multibody rigid–flexible dynamics of the novel DFP system are derived.
This paper is organized as follows.
Section 2 presents a detailed description of the novel DFP system and discusses the difference between a conventional DFP system and the novel DFP system under study.
Section 3 details the coordinate system and vectors used in this paper.
Section 4 analyzes the forces and moments acting on the system. The six-degrees-of-freedom multibody rigid–flexible dynamics of the novel DFP system are established in
Section 5. The control system for the DFP system is designed in
Section 6, which is followed by simulation studies in
Section 7. Finally, conclusions are drawn in
Section 8.
7. Simulation Studies
In this section, we apply the novel DFP system in a collaborative observation mission. Specifically, both Payload I and Payload II perform the inertial orientation mission simultaneously. Simulation studies on the pointing performance of the novel DFP system are conducted. The simulation conditions and control system parameters, both of which can be referred to Ref. [
16], are listed in
Table 8 and
Table 9, respectively.
The simulation results are shown from
Figure 5,
Figure 6,
Figure 7 and
Figure 8.
Figure 5 presents the relative position error curve of PM I and PM II, whereas
Figure 6 depicts the attitude curve and angular velocity curve of SM.
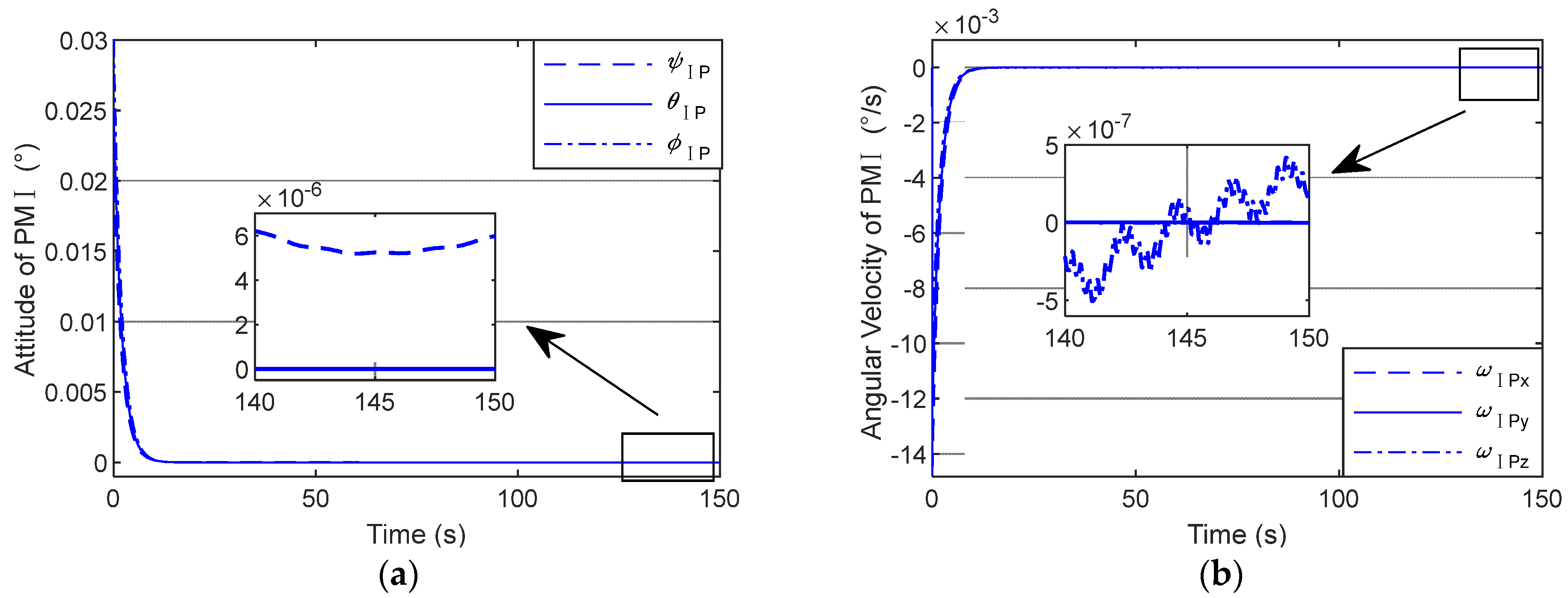
Figure 7 illustrate the attitude curve and angular velocity curve of PM I, respectively. Similarly,
Figure 8 shows the attitude curve and angular velocity curve of PM II.
As is shown in
Figure 5, the norms of the three components of the relative position error are kept within 2 mm, which indicates that the control system designed in this paper can well satisfy the noncontact actuator’s working range requirement (
) [
26]. Based on the simulation results in
Figure 6,
Figure 7 and
Figure 8 the pointing performances of SM, PM I and PM II are summarized in
Table 10,
Table 11 and
Table 12 respectively.
According to
Table 10, both the pointing accuracy and pointing stability of SM are of an order of −3.
As is presented in
Table 11, the pointing accuracy of PM I reaches an order of −6, while the pointing stability of PM I is of an order of −7.
Table 12 demonstrates that the pointing accuracy of PM II is of an order of −5, while the pointing stability of PM II reaches an order of −7.
Comparing the above results between the support module and payload modules, both PM I and PM II achieve a pointing performance increase of more than two orders of magnitude. Specifically, as for the pointing accuracy, PM I and PM II are three orders and two orders lower than their counterpart, SM. As regards the pointing stability, both payloads are four orders lower than SM.
Extensive experimental tests have been performed to validate the proposed novel DFP system in comparison with traditional spacecraft.
Table 13 summarizes the pointing performance comparison between the proposed novel DFP system and a traditional spacecraft system.
Modern space missions put forward arcsecond-level pointing and stability requirements for satellite platforms. The attitude of the satellite platform in the mission of the NESS (Near-Earth Space Surveillance) is required to be stabilized to ~10 arcsec [
27]. The stability requirement of the satellite platform in the PICARD scientific mission is over 5 arcsec/s [
28]. For the Herschel Space Observatory, it is required that the APE (absolute pointing error) in star pointing is 3.7 arcsec and the RPE (pointing drift error) requirement (for a period of 60 s) is 0.30 arcsec [
29]. From the above-mentioned modern space missions, it is clear that arcsec-level pointing performance and arcsec/s-level stability performance are greatly needed [
30]. According to the pointing performance comparison in
Table 13, the pointing and stability performance of the proposed novel DFP system meet the arcsec-level and arcsec/s-level requirements and outperform its counterpart, the traditional spacecraft system.
The proposed novel DFP system provides excellent performance that meets high-precision pointing requirements. In addition, the pointing performances of both payloads outperform support module, thus proving to be a promising solution for collaborative observation missions.
8. Conclusions
This paper proposes a novel DFP system for collaborative observation. In comparison with a conventional DFP system, the support module carries more than one payload modules via the noncontact actuator. The six-degrees-of-freedom multibody rigid–flexible dynamics of the novel DFP system are derived via Newtonian mechanics. The dynamics model, considering the solar panels and umbilical as the flexible part, can precisely depict the motion of the DFP system.
Simulation studies for a collaborative observation mission were conducted to test the performance of the novel DFP system. The simulation results indicate that the proposed novel DFP system can not only deal with a collaborative observation mission but also achieve high pointing performance.
Although the number of payloads in the proposed DFP system is two, more payloads can be introduced via the noncontact actuator. More payloads incorporated into the DFP system means more complex dynamics of the system. Thus, considerable attention in future work should be paid to a coupling effect analysis between different payloads.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}