
Validating Dynamic Sectorization for Air Traffic Control Due to Climate Sensitive Areas: Designing Effective Air Traffic Control Strategies

Abstract
:1. Introduction
2. Background
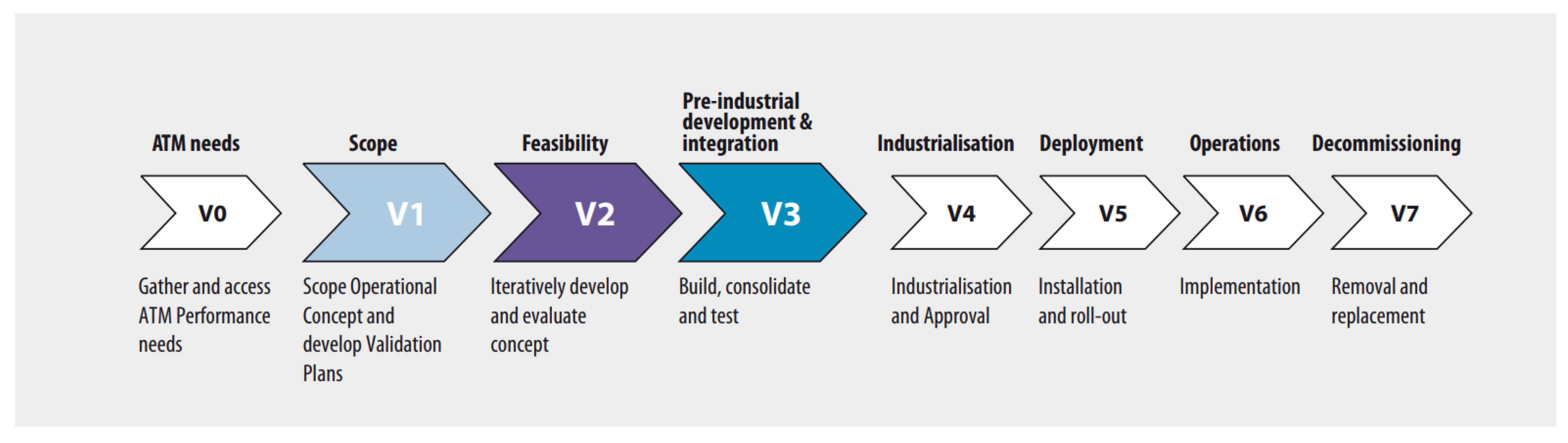
2.1. Concept Validation
2.2. Dynamic Airspace Sectorization (DAS)
2.2.1. Fuzzy Clustering
2.2.2. Voronoi Diagrams
2.2.3. Evolutionary Algorithms (EA)
- Sum of the task load over all sectors.
- Standard deviation of the task load between sectors.
- Standard deviation of the interior angles (the angles between successive edges).
- Number of flight intervals (partition of flights by sectors) over all sectors.
- Closeness of vertices (VC, optional, in case interim diagrams are in use).
3. Scenarios
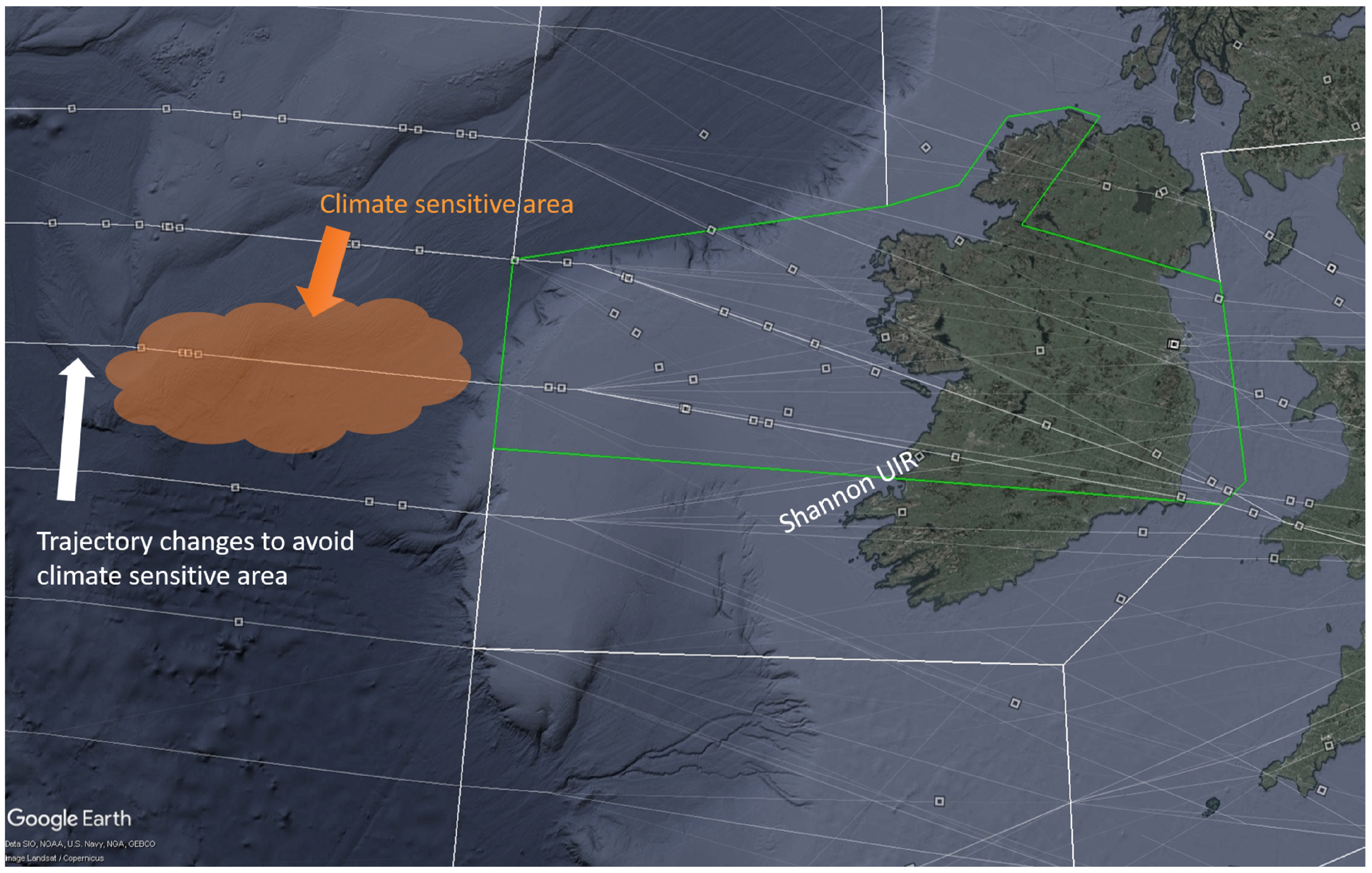
- A climate sensitive area evolves west of Ireland in the morning in the altitude of en-route transatlantic flights.
- Based on a prediction, the area is declared as a climate sensitive area from 0600 UTC.
- Flights originally planned to enter this area after that time are re-routed to reduce the climate impacts.
- Re-routed flights still follow the North Atlantic Tracks but on different paths.
- To demonstrate the capabilities of the dynamic sectorization, only horizontal re-routings are applied.
4. Methodology
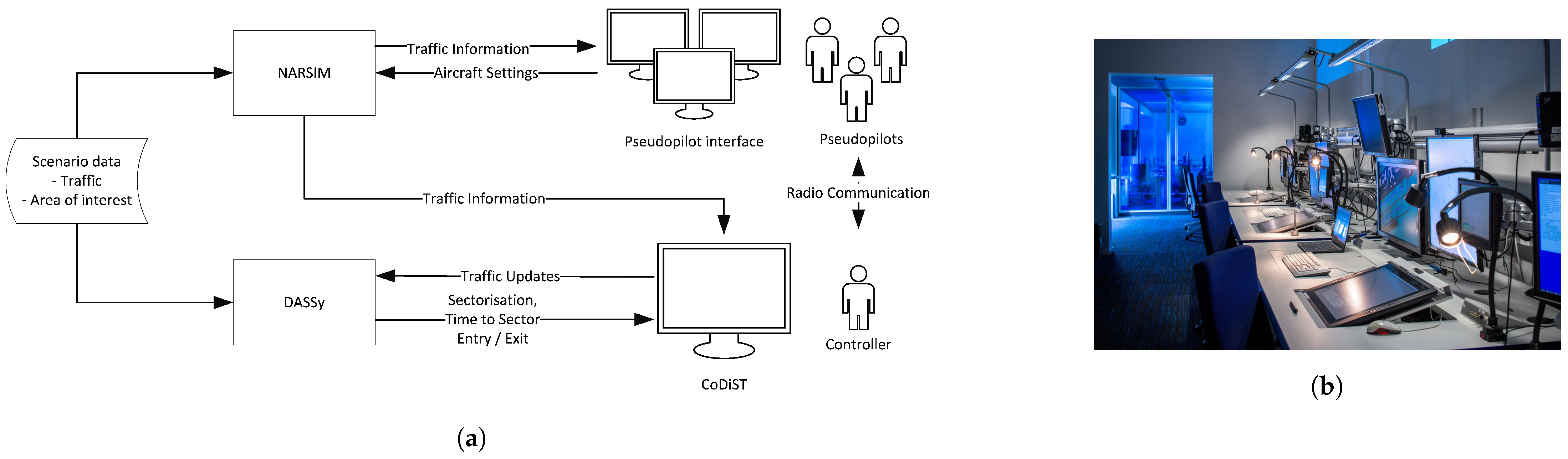
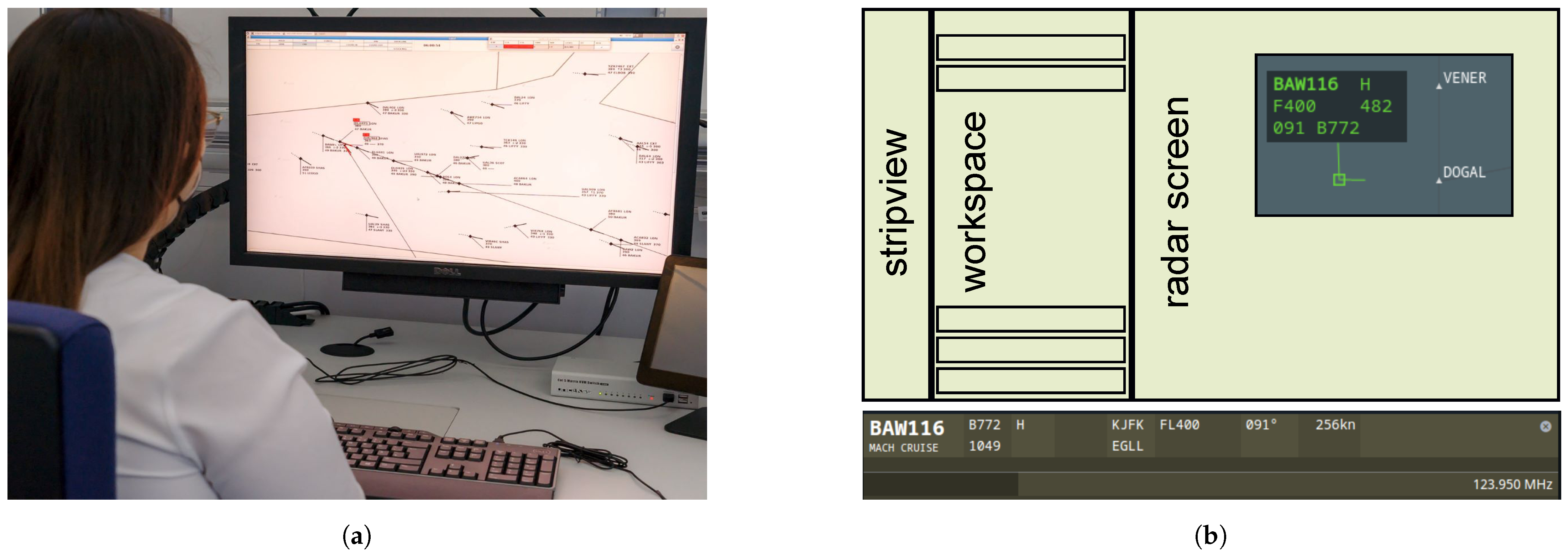
4.1. Simulation Environment
- Label interaction and deconfliction.
- Short- and medium-term conflict detection, prediction and visualization.
- Conformance monitoring and trajectory adaptation.
- Flight status color.
- Velocity/speed vector and track history.
- Mouse control (zoom/movement of visible airspace area/selection of flights or interactions).
- Elastic vector/probe trajectory/graphical route modification.
- Restricted areas.
- Range/heading calculation and calculation of the actual and expected minimal distance between flights.
4.2. Scenario Integration into the Simulation Environment
4.3. Evaluation Concept
5. Results and Discussion
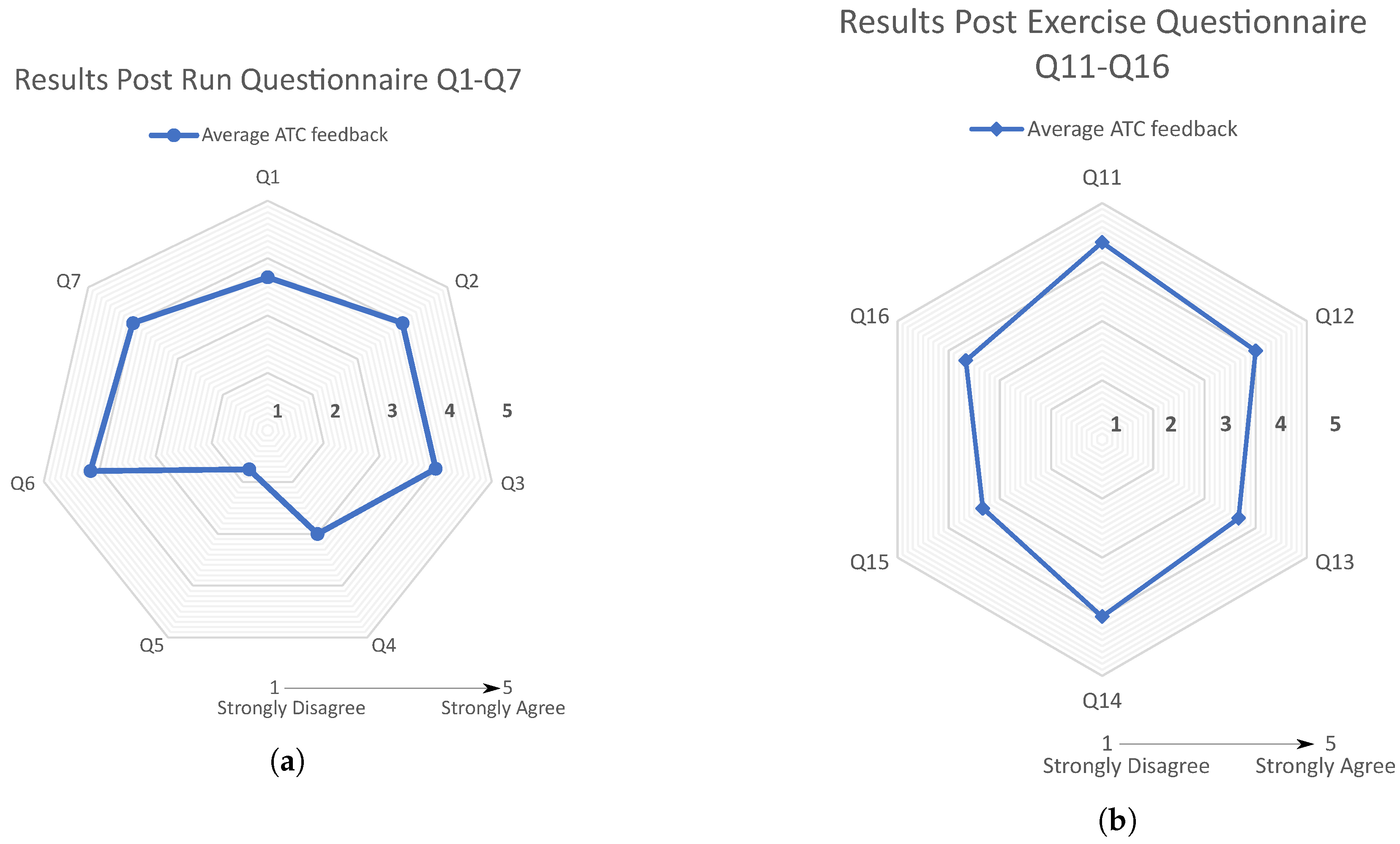
5.1. Questionnaires
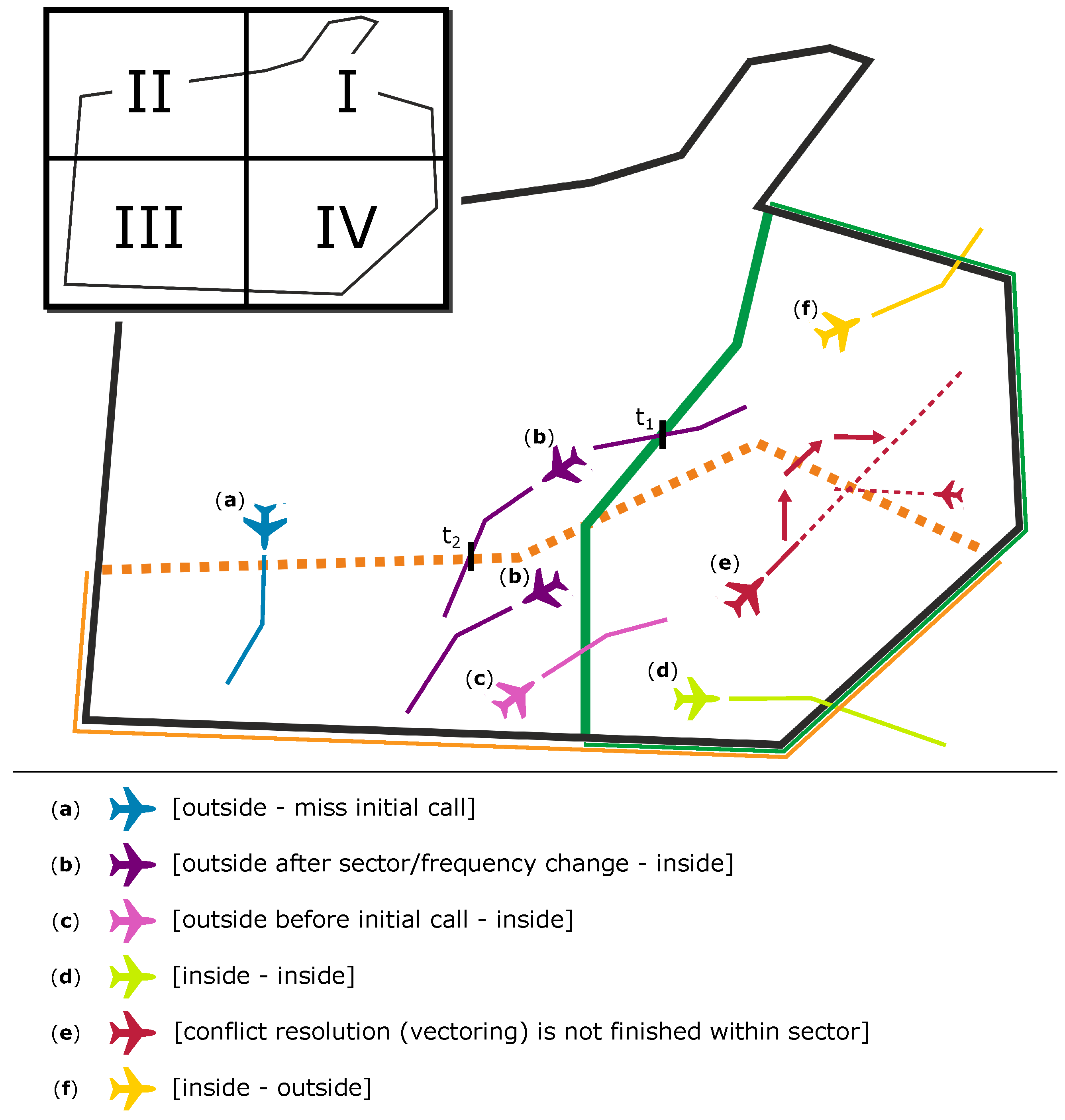
- Aircraft leaves the sector but returns to the control area due to sector adaptation.
- Aircraft is in a different sector after sector adaptation.
- Aircraft leaves sector right before sector adaptation.
- Aircraft responsibility could be unclear after sector adaptation.
- Aircraft trajectories close to new sector boundaries (normally, a 2.5 NM distance).
- Aircraft trajectories with sharp angle of entry. Receiving first instructions could take a long time according to the 2.5 NM rule.
- Vectoring as conflict solution could not be finished after the sector.
5.2. Proposal of DAS Procedures
5.2.1. Naming Convention
- Unique names.
- Easy to use/pronounce.
- Obvious and informative.
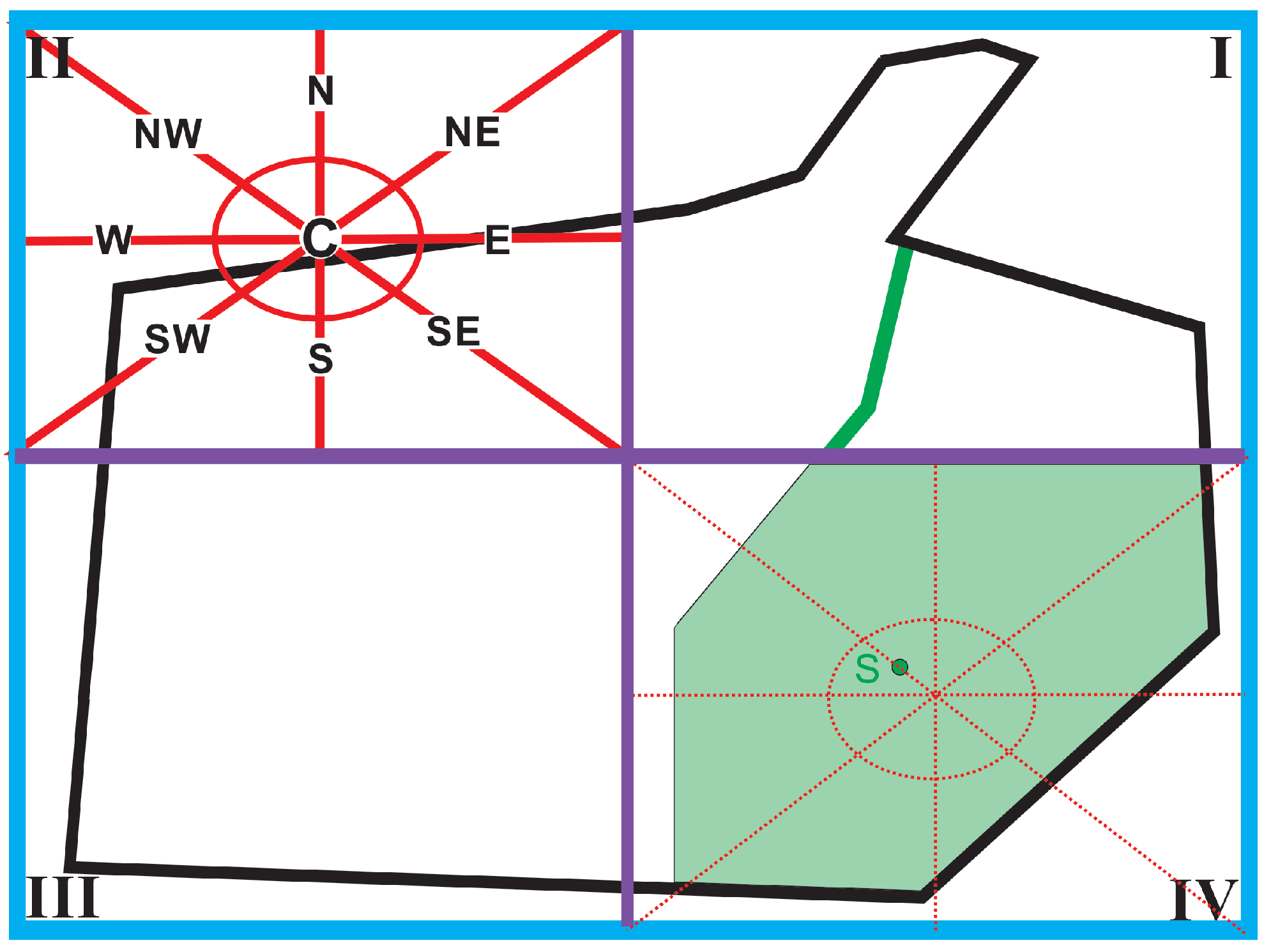
5.2.2. Controller Visual Guidelines for DAS Environments
- There is an ongoing conflict resolution.
- ATCO1 keeps the responsibility for an aircraft longer than expected.
- Special predefined handover restrictions for flight level or speed cannot be met in time, and coordination is necessary.
5.2.3. Controller DAS Manual
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Simorgh, A.; Soler, M.; Gonzáles-Arribas, D.; Matthes, S.; Grewe, V.; Dietmüller, S.; Baumann, S.; Yamashita, H.; Yin, F.; Castino, F.; et al. A Comprehensive Survey on Climate Optimal Aircraft Trajectory Planning. Aerospace 2022, 9, 146. [Google Scholar] [CrossRef]
- Matthes, S.; Grewe, V.; Dahlmann, K.; Frömming, C.; Irvine, E.; Lim, L.; Linke, F.; Lührs, B.; Owen, B.; Shine, K.; et al. A concept for multi-criteria environmental assessment of aircraft trajectories. Aerospace 2017, 4, 42. [Google Scholar] [CrossRef]
- Zelinski, S.; Lai, C.F. Comparing methods for dynamic airspace configuration. In Proceedings of the 2011 IEEE/AIAA 30th Digital Avionics Systems Conference, Seattle, WA, USA, 16–20 October 2011; pp. 3A1-1–3A1-13. [Google Scholar] [CrossRef]
- Hind, H.; El Omri, A.; Abghour, N.; Moussaid, K.; Rida, M. Dynamic airspace configuration: Review and open research issues. In Proceedings of the 2018 fourth International Conference on Logistics Operations Management (GOL), Le Havre, France, 10–12 April 2018; pp. 1–7. [Google Scholar]
- Flener, P.; Pearson, J. Automatic Airspace Sectorisation: A Survey. arXiv 2013, arXiv:1311.0653. [Google Scholar]
- EUROCONTROL. European Operational Concept Validation Methodology; Version 3; EUROCONTROL: Brussels, Belgium, 2010; Volume 1. [Google Scholar]
- Mankins, J. Technology Readiness Level—A White Paper; 6 April 1995; Advanced Concepts Office, Office of Space Access and Technology, NASA: Washington, DC, USA, 1995. [Google Scholar]
- Kopardekar, P.; Bilimoria, K.; Sridhar, B. Initial Concepts for Dynamic Airspace Configuration. In 7th AIAA ATIO Conf, second CEIAT Int’l Conf on Innov and Integr in Aero Sciences, 17th LTA Systems Tech Conf Followed by Second TEOS Forum; AIAA: Belfast, Northern Ireland, 2007. [Google Scholar]
- Gerdes, I.; Temme, A.; Schultz, M. From free-route air traffic to an adapted dynamic main-flow system. Transp. Res. Part Emerg. Technol. 2020, 115, 102633. [Google Scholar] [CrossRef]
- Gerdes, I.; Temme, A.; Schultz, M. Dynamic airspace sectorisation for flight-centric operations. Transp. Res. Part Emerg. Technol. 2018, 95, 460–480. [Google Scholar] [CrossRef]
- Ruspini, E.H.; Bezdek, J.C.; Keller, J.M. Fuzzy Clustering: A Historical Perspective. IEEE Comput. Intell. Mag. 2019, 14, 45–55. [Google Scholar] [CrossRef]
- Bezdek, J.C. Pattern Recognition with Fuzzy Objective Function Algorithms; Springer: Berlin/Heidelberg, Germany, 1981. [Google Scholar]
- Keller, A. Objective Function Based Fuzzy Clustering in Air Traffic Management. Ph.D. Thesis, Otto-von-Guericke-Universtät Magdeburg, Magdeburg, Germany, 2002. [Google Scholar]
- de Berg, M.; Cheong, O.; van Kreveld, M.; Overmars, M. Computational Geometry: Algorithms and Applications; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Xue, M. Airspace Sector Redesign Based on Voronoi Diagrams. J. Aerosp. Comput. Inf. Commun. 2009, 6, 624–634. [Google Scholar] [CrossRef]
- Fortune, S. A sweepline algorithm for Voronoi diagrams. In Proceedings of the Second Annual Symposium on Computational Geometry, Yorktown Heights, NY, USA, 2–4 June 1986; pp. 16–22. [Google Scholar]
- Michalewicz, Z. Genetic Algorithms + Data Structures = Evolution Programs; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Gerdes, I.; Klawonn, F.; Kruse, R. Evolutionäre Algorithmen: Genetische Algorithmen—Strategien und Optimierungsverfahren—Beispielanwendungen; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Kölker, K.; Lütjens, K. Using Genetic Algorithms to Solve Large-scale Airline Network Planning Problems. Transp. Res. Procedia 2015, 10, 900–909. [Google Scholar] [CrossRef]
- Deveci, M.; Çetin Demirel, N. Evolutionary algorithms for solving the airline crew pairing problem. Comput. Ind. Eng. 2017, 115, 389–406. [Google Scholar] [CrossRef]
- Soolaki, M.; Mahdavi, I.; Mahdavi-Amiri, N.; Hassanzadeh, R.; Aghajani, A. A new linear programming approach and genetic algorithm for solving airline boarding problem. Appl. Math. Model. 2012, 36, 4060–4072. [Google Scholar] [CrossRef]
- Schultz, M. Dynamic change of aircraft seat condition for fast boarding. Transp. Res. Part C Emerg. Technol. 2017, 85, 131–147. [Google Scholar] [CrossRef]
- Sergeeva, M.; Delahaye, D.; Mancel, C.; Vidosavljevic, A. Dynamic airspace configuration by genetic algorithm. J. Traffic Transp. Eng. 2017, 4, 300–314. [Google Scholar] [CrossRef]
- Zou, X.; Cheng, P.; An, B.; Song, J.O. Sectorization and Configuration Transition in Airspace Design. Math. Probl. Eng. 2016, 2016, 1–21. [Google Scholar] [CrossRef]
- Standfuß, T.; Gerdes, I.; Temme, A.; Schultz, M. Dynamic airspace optimisation. CEAS Aeronaut. J. 2018, 9, 517–531. [Google Scholar] [CrossRef]
- EUROCONTROL. DDR2 Reference Manual for General Users 2.9.5; EUROCONTROL: Brussels, Belgium, 2018. [Google Scholar]
- Grewe, V.; Dahlmann, K.; Flink, J.; Frömming, C.; Ghosh, R.; Gierens, K.; Heller, R.; Hendricks, J.; Jöckel, P.; Kaufmann, S.; et al. Mitigating the climate impact from aviation: Achievements and results of the DLR WeCare project. Aerospace 2017, 4, 34. [Google Scholar] [CrossRef]
- Frömming, C.; Grewe, V.; Brinkop, S.; Jöckel, P.; Haslerud, A.S.; Rosanka, S.; Van Manen, J.; Matthes, S. Influence of weather situation on non-CO 2 aviation climate effects: The REACT4C climate change functions. Atmos. Chem. Phys. 2021, 21, 9151–9172. [Google Scholar] [CrossRef]
- Rao, P.; Yin, F.; Grewe, V.; Yamashita, H.; Jöckel, P.; Matthes, S.; Mertens, M.; Frömming, C. Case Study for Testing the Validity of NOx-Ozone Algorithmic Climate Change Functions for Optimising Flight Trajectories. Aerospace 2022, 9, 231. [Google Scholar] [CrossRef]
- Dhief, I. Optimization of Aircraft Trajectories over the North Atlantic Airspace. Ph.D. Thesis, Université Paul Sabatier (Toulouse 3), Toulouse, France, 2018. [Google Scholar]
- ICAO. Application of Separation Minima—North Atlantic Region, NAT Doc 008 (EN), Amd 10, 1st ed.; ICAO European and North Atlantic Office: Montréal, QC, Canada, 2020. [Google Scholar]
- ten Have, J. The Development of the Nlr Atc Research Simulator (Narsim); Flight Devision, 01 ed.; National Aerospace Laboratory NLR: Amsterdam, The Netherlands, 1992. [Google Scholar]
- Deutsches Zentrum für Luft-und Raumfahrt e.V. Air Traffic Management and Operations Simulator (ATMOS); Institut für Flugführung: Braunschweig, Germany, 2019. [Google Scholar]
- EUROCONTROL. EEC Technical Report No. 2009-008, Base of Aircraft data (BADA); 008 ed.; EUROCONTROL EEC: Brussels, Belgium, 2009. [Google Scholar]
- ACA. ICAO Standard Phraseology. A Quick Reference Guide for Commercial Air Transport Pilots; Safety Initiative; EUROCONTROL: Brussels, Belgium, 2011. [Google Scholar]
- DDF GmbH. Luftfahrthandbuch Deutschland. Available online: https://aip.dfs.de/basicAIP/ (accessed on 19 January 2023).
- Joshi, A.; Kale, S.; Chandel, S.; Pal, D.K. Likert scale: Explored and explained. Br. J. Appl. Sci. Technol. 2015, 7, 396. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Questions | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Q1–Q7 and Q11–Q18 | strongly disagree | disagree | neither agree nor disagree | agree | strongly agree |
| Q8 | very bad | poor | fair | good | excellent |
| Q9–Q10 | completely demanding | demanding | neither demanding nor undemanding | undemanding | completely undemanding |
| ID | Question |
|---|---|
| Q1 | I felt comfortable during the overall run. |
| Q2 | I was able to plan and organize my work according to my preferences. |
| Q3 | I was able to predict the traffic evolution dependent on the traffic situation and sectorization. |
| Q4 | I had the feeling of focusing too much on a single problem or a specific area during my work. |
| Q5 | I have the feeling that I focused too much on a single issue because of the changing sectorization. |
| Q6 | I was provided with all the information I needed to understand the traffic situation/implication of sector adaptation. |
| Q7 | The received information was timely and complete. |
| Q8 | On average, I would rate my situational awareness as… |
| Q9 | Considering the whole of the accomplished tasks, the time pressure experienced during this run was: |
| Q10 | The overall workload in terms of the attention, skill or effort I experienced during this run was: |
| Q11 | In general, I felt comfortable in managing aircraft en-route in the dynamic sectorization environment. |
| Q12 | Applying dynamic sectorization en-route will not negatively affect job satisfaction levels for ATCOs. |
| Q13 | The applied concept for en-route dynamic sectorization will allow a sufficient level of safety. |
| Q14 | The applied concept for en-route dynamic sectorization will allow a satisfactory personal situational awareness. |
| Q15 | The applied concept for en-route dynamic sectorization will allow management of the personal workload. |
| Q16 | The introduction of dynamic en-route sectorization does not imply additional effort or abilities. |
| Q17 | Do you see any unexpected or unwanted effects regarding the dynamically adapting sectors for managing en-route traffic? |
| Q18 | Do you see any need for change in training or human resource management to allow the application of the dynamic sectorization concept en-route? |
| Case | Active Sector 1 | Active Sector 2 | Action before Switch |
|---|---|---|---|
| (a) | Aircraft is not in the sector. | Aircraft is in the sector. | ATCO of active sector one receives notification that aircraft will enter in [XX] min after sector two will be active. Entry time in sector two and label on radar screen are highlighted. |
| (b) | Aircraft is not in the sector. | Aircraft is in the sector. | ATCO of active sector one receives notification that aircraft will enter again in [XX] min after sector two will be active. Entry time in sector two and label on radar screen are highlighted. If aircraft is already inside sector 2 after the switch. Entry time equals sector boundary time. |
| (c) | Aircraft is not in the sector and did not call for identification (initial call) | Aircraft is in the sector. | ATCO of active sector one receives notification that aircraft will be inside sector two after switch. Entry time in sector two and label on radar screen are highlighted. Entry time equals sector boundary time. Pilot receives notification for a two minute early initial call. |
| (d) | Aircraft is in the sector. | Aircraft is in the sector. | No proposals. |
| (e) | Aircraft is in the sector. | Aircraft is in the sector but will leave soon. Vectoring as conflict resolution is not finished before sector leave. | ATCO keeps responsibility of the aircraft until conflict resolution is finished. ATCO2 receives notification and highlighted that conflict resolution is not finished yet. Predicted entry time is displayed on label. |
| (f) | Aircraft is in the sector. | Aircraft is not in the sector. | ATCO of active sector one receives notification that aircraft will be outside sector after sector two will be active. Aircraft hand over to ATCO2 needs to be performed before sector two is active. Hand over time equals sector boundary time minus one minute. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahrenhold, N.; Gerdes, I.; Mühlhausen, T.; Temme, A. Validating Dynamic Sectorization for Air Traffic Control Due to Climate Sensitive Areas: Designing Effective Air Traffic Control Strategies. Aerospace 2023, 10, 405. https://doi.org/10.3390/aerospace10050405
Ahrenhold N, Gerdes I, Mühlhausen T, Temme A. Validating Dynamic Sectorization for Air Traffic Control Due to Climate Sensitive Areas: Designing Effective Air Traffic Control Strategies. Aerospace. 2023; 10(5):405. https://doi.org/10.3390/aerospace10050405
Chicago/Turabian StyleAhrenhold, Nils, Ingrid Gerdes, Thorsten Mühlhausen, and Annette Temme. 2023. "Validating Dynamic Sectorization for Air Traffic Control Due to Climate Sensitive Areas: Designing Effective Air Traffic Control Strategies" Aerospace 10, no. 5: 405. https://doi.org/10.3390/aerospace10050405