
Generation of Guidance Commands for Civil Aircraft to Execute RNP AR Approach Procedure at High Plateau

Abstract
:1. Introduction
- A 3D precise guidance command generation method for civil aircraft to perform the RNP AR approach procedure is proposed. Specifically, the lateral flight guidance law is designed based on the guidance requirements of the horizontal segment, and the vertical guidance commands are calculated according to the type of the horizontal segment. In addition, a flight guidance law parameter-tuning strategy based on the particle swarm optimization algorithm is given.
- The construction method of the lateral navigation transition paths in ARINC specification 424-21 is presented, including tangent transition, position interception, 45° interception, direct transition, and arc interception. Furthermore, a lateral segment switching strategy based on the angular bisector is introduced to realize automatic flight, and the implementation process of the proposed method is described in detail.
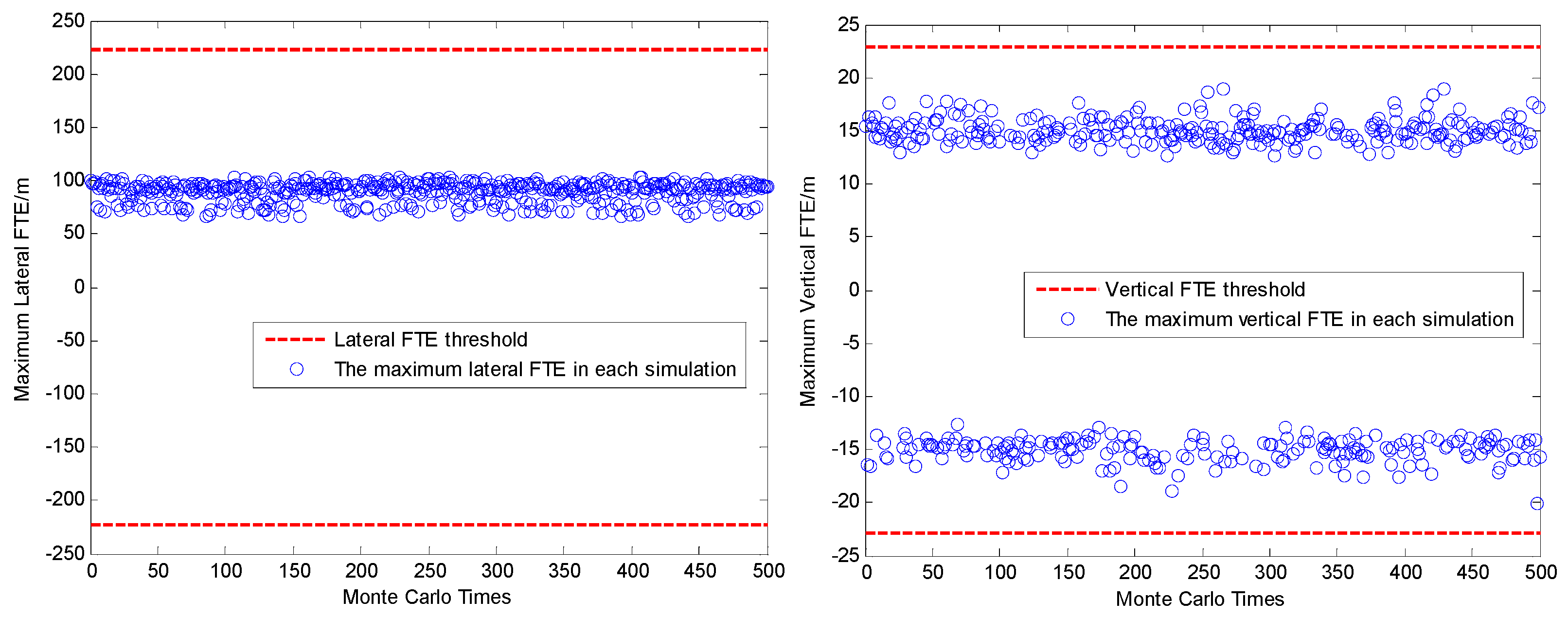
- To verify the effectiveness of the proposed algorithm, based on analyzing the RNP AR approach guidance requirements of Jiuzhai Huanglong Airport, the flight technical error (FTE) is selected as the index to evaluate the guidance effect of the proposed guidance algorithm, and 500 stochastic simulations are conducted via the Monte Carlo method under navigation sensors for noise and wind disturbance.
2. Design of Guidance Law for Performing RNP AR Approach Procedure
2.1. Design of Lateral Flight Guidance Law
- (1)
- TF segment
- (2)
- CX and FX segments
- (3)
- AF and RF segments
- (4)
- VX segments
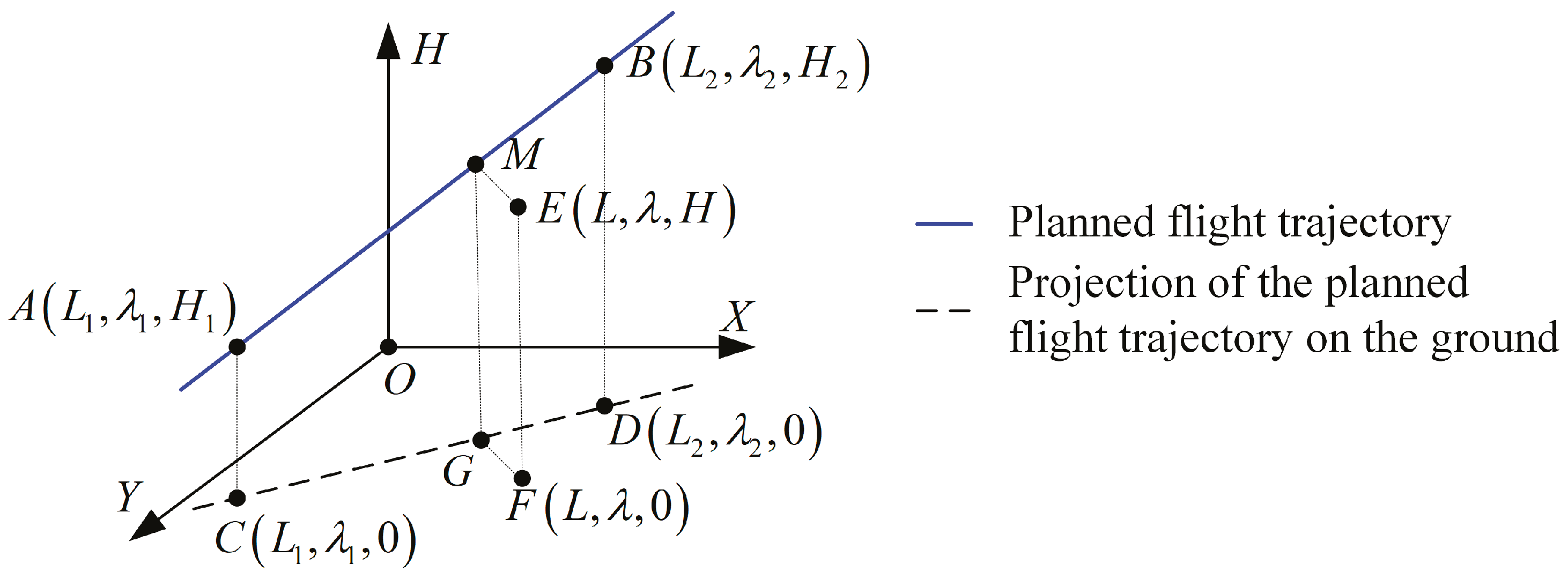
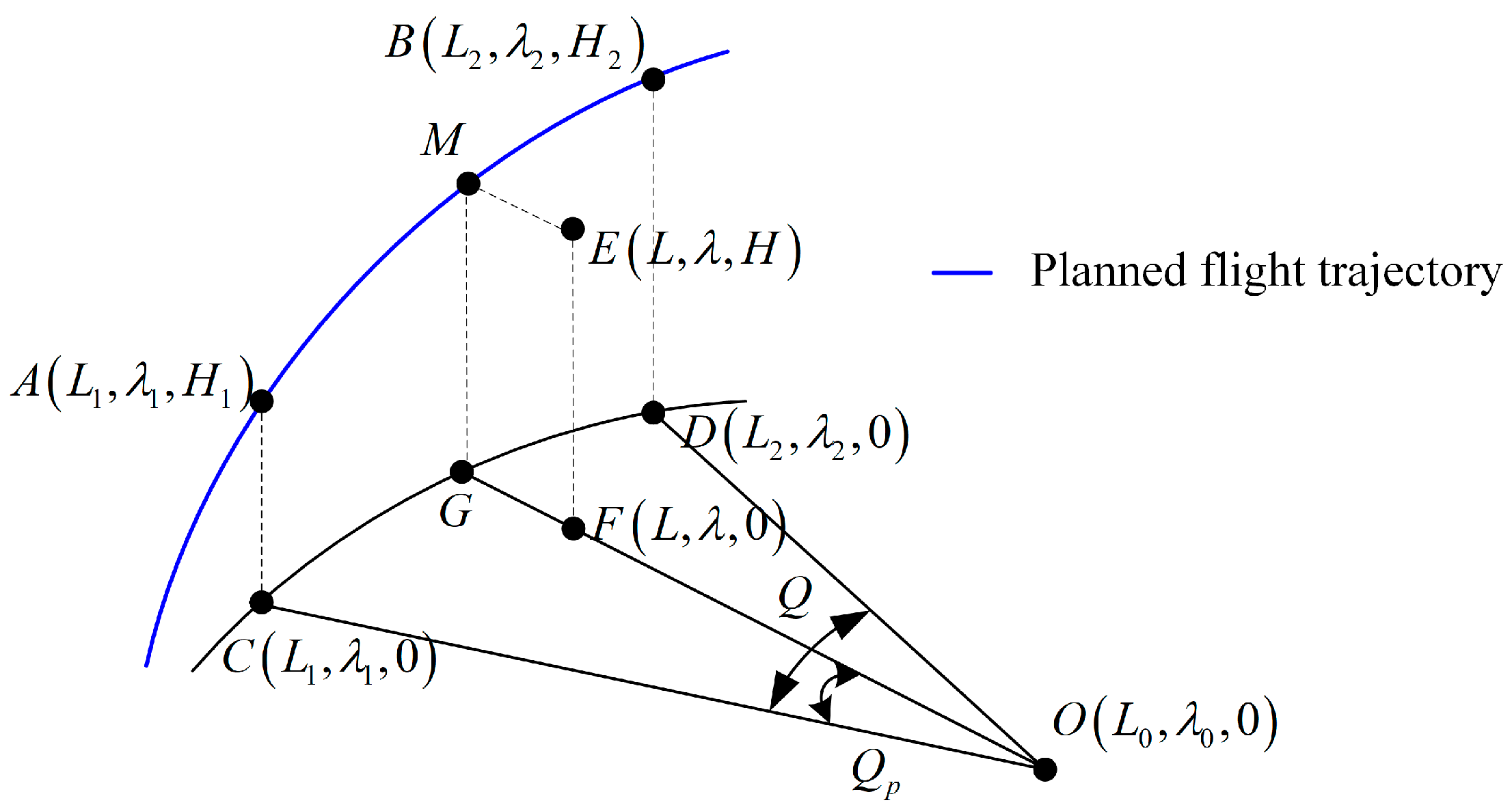
2.2. Design of Vertical Flight Guidance Law
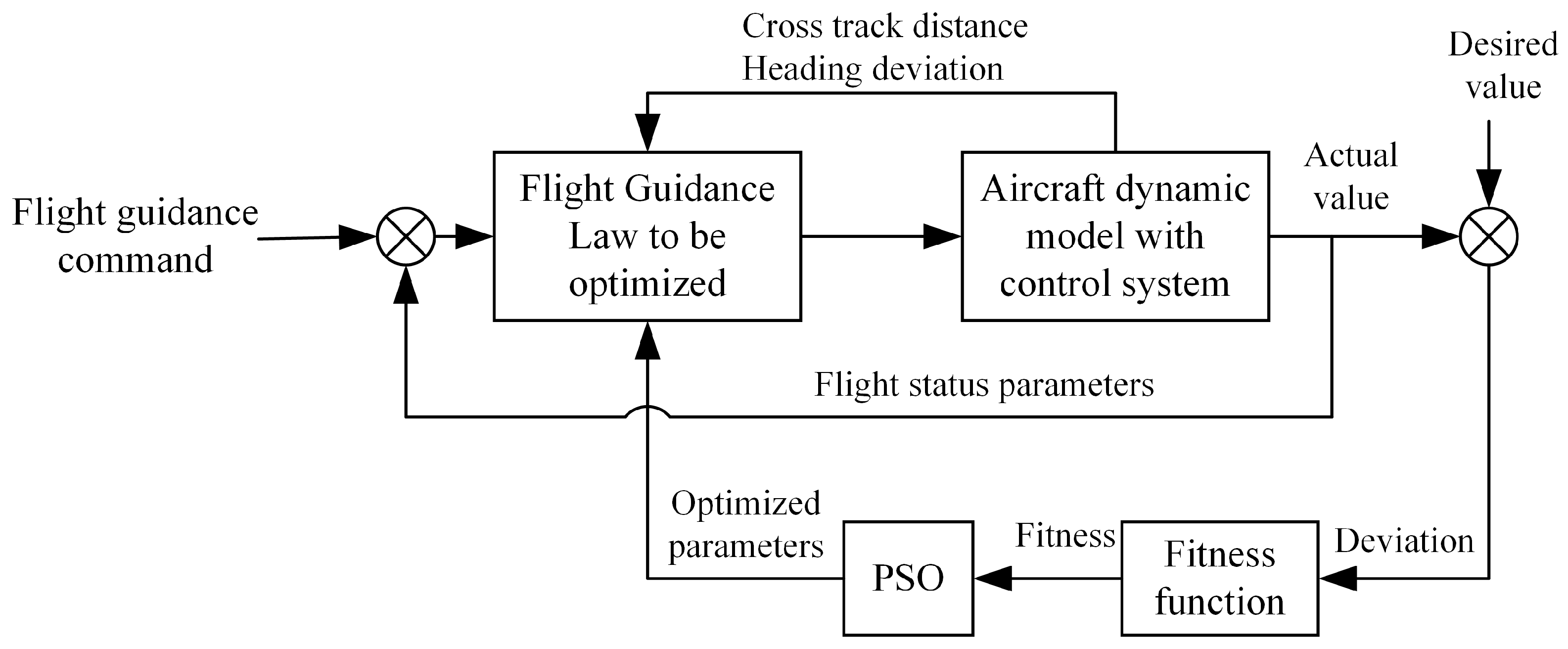
2.3. Parameter Selection of Flight Guidance Law Based on PSO
- (1)
- Encoding of feasible solutions
- (2)
- Construction of the fitness function
- (3)
- Updating strategy
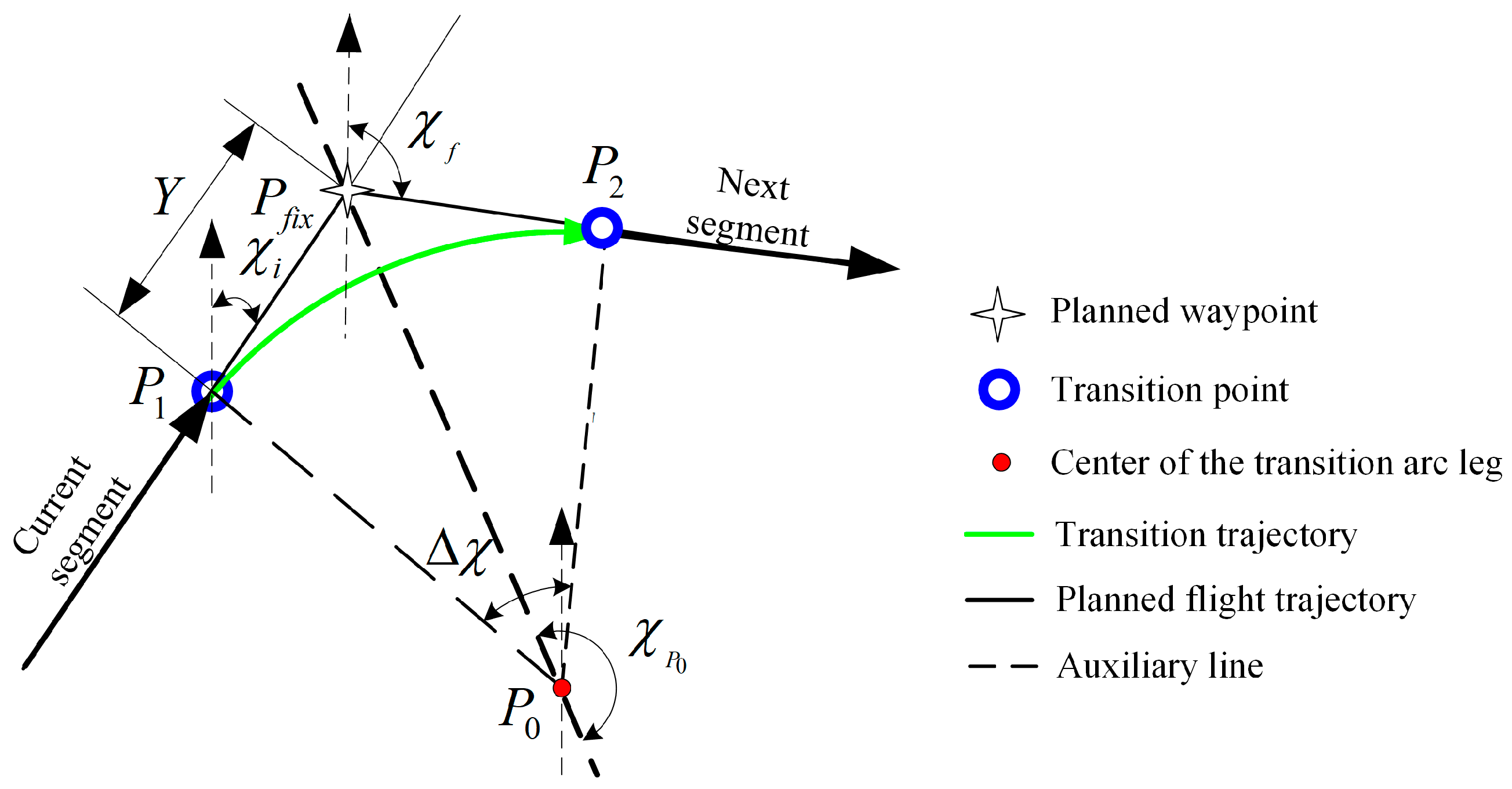
3. Generation of Lateral Navigation Transition Path
3.1. Construction of Lateral Navigation Transition Path
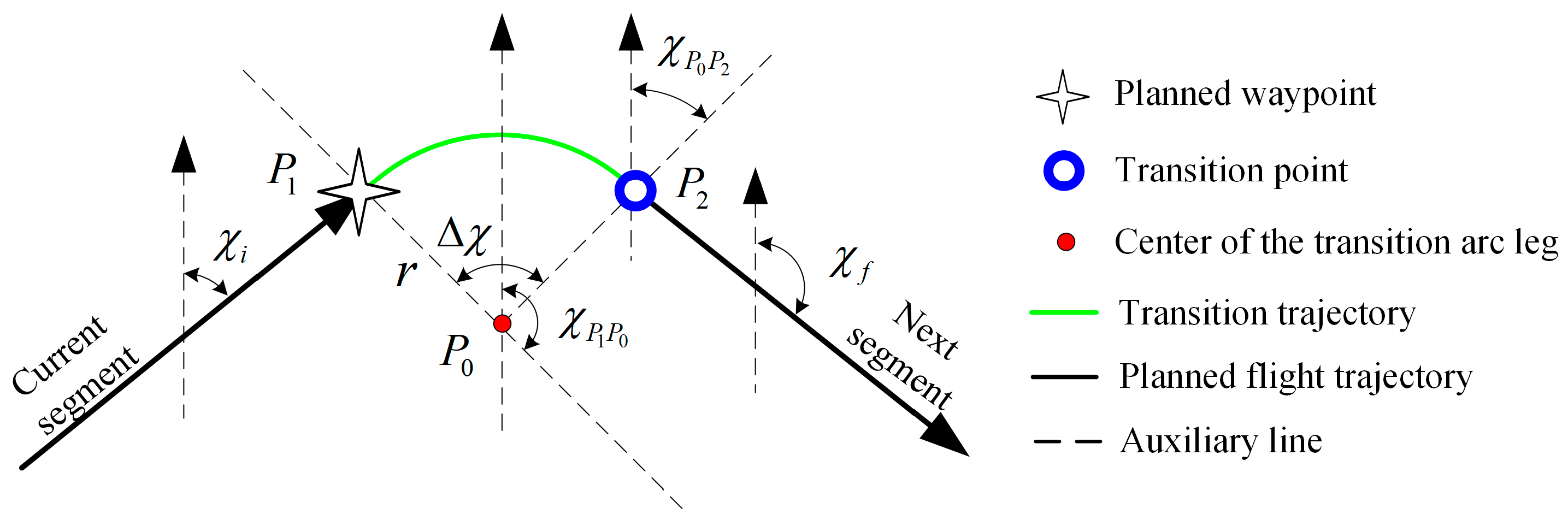
- (1)
- Tangent transition
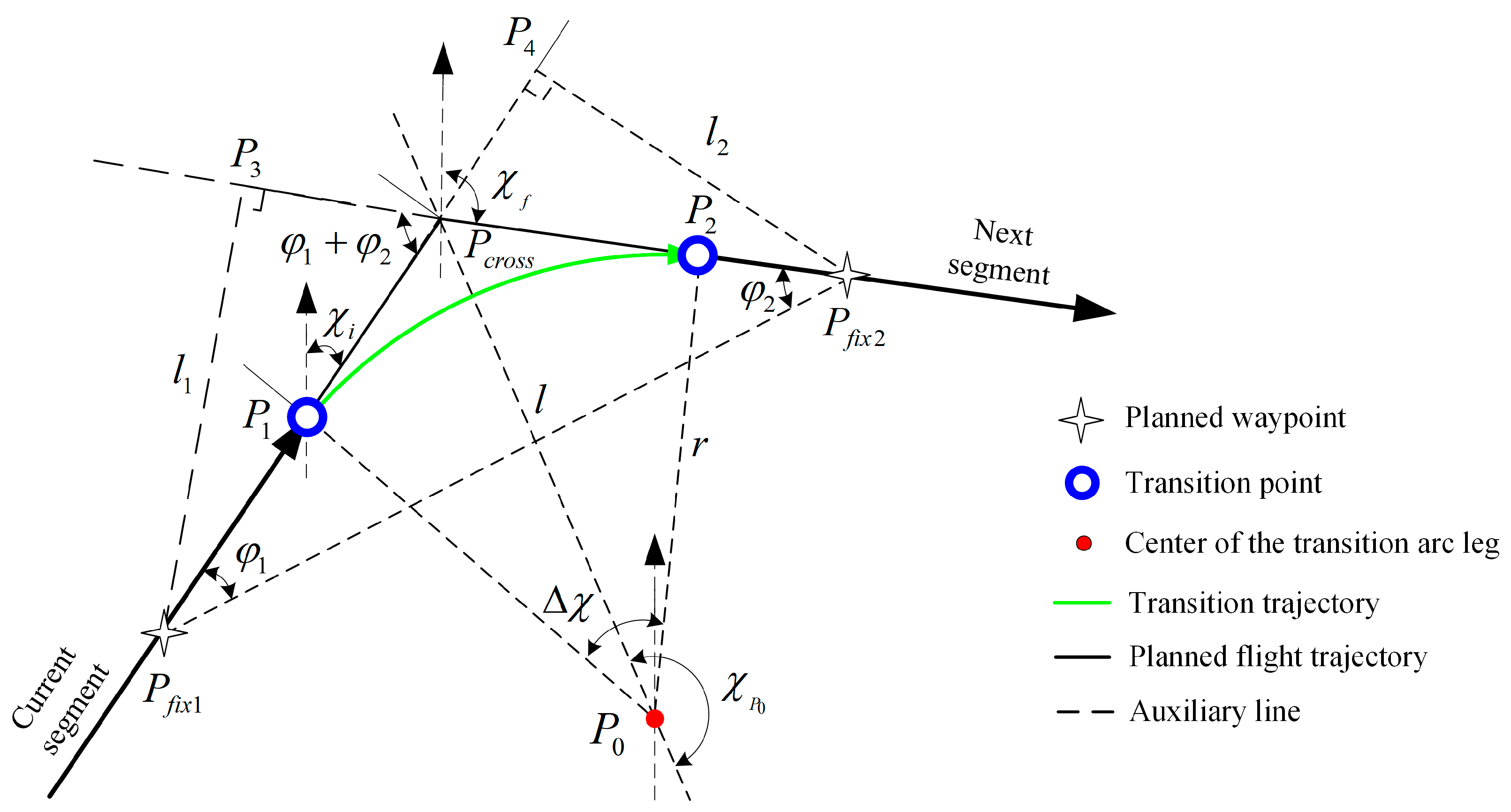
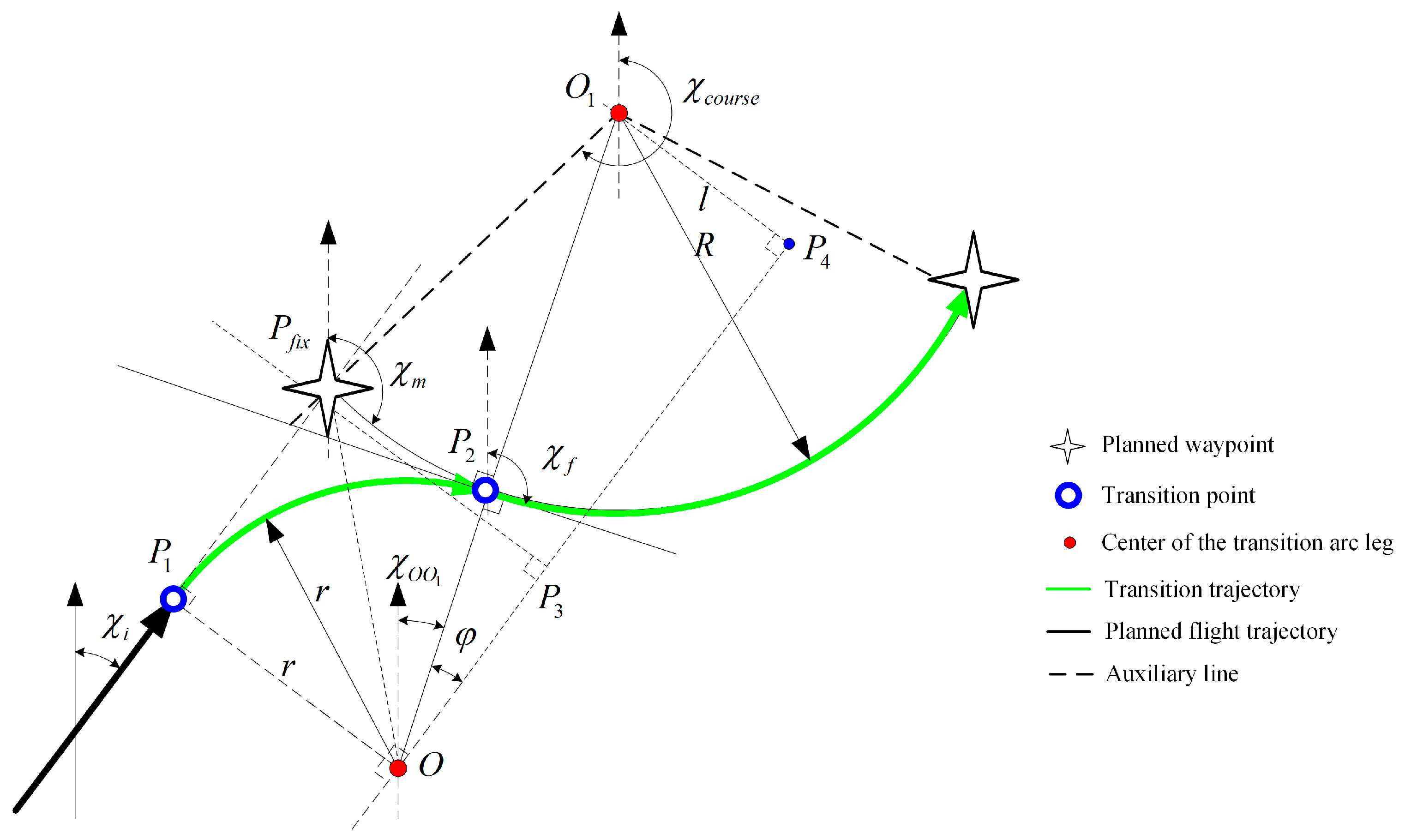
- (2)
- Position interception
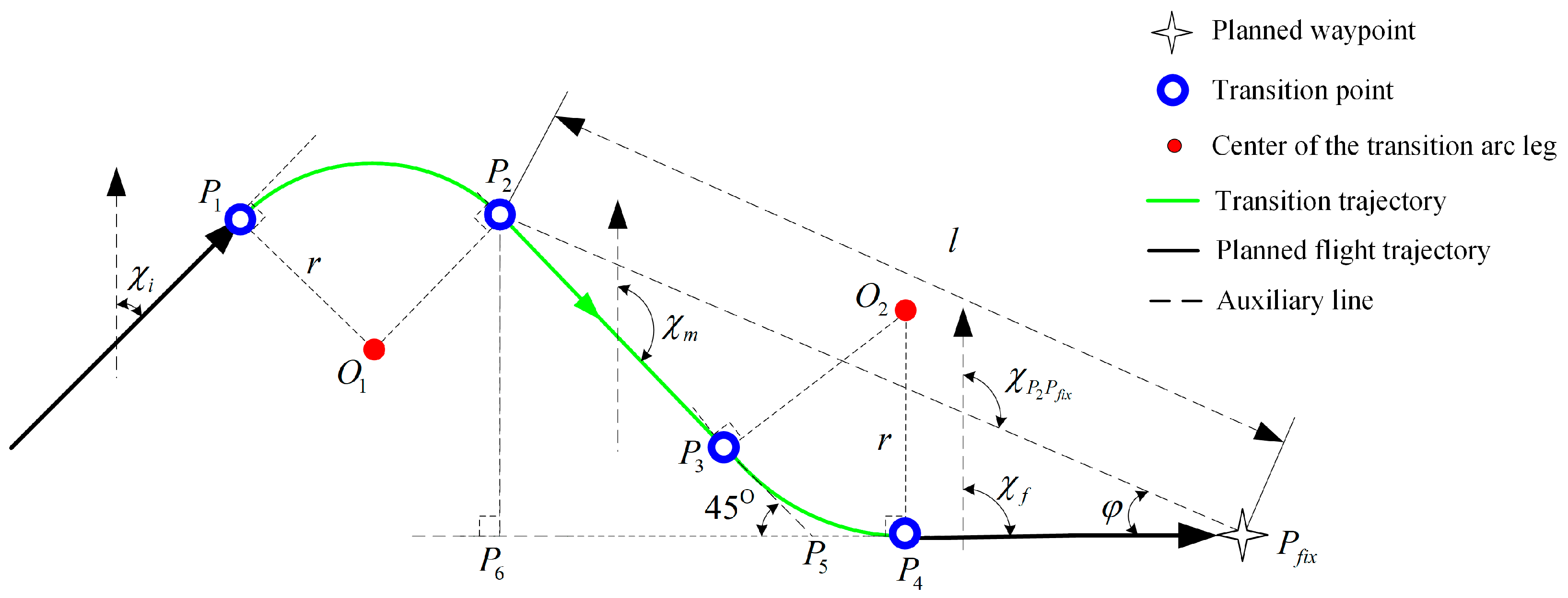
- (3)
- 45° interception
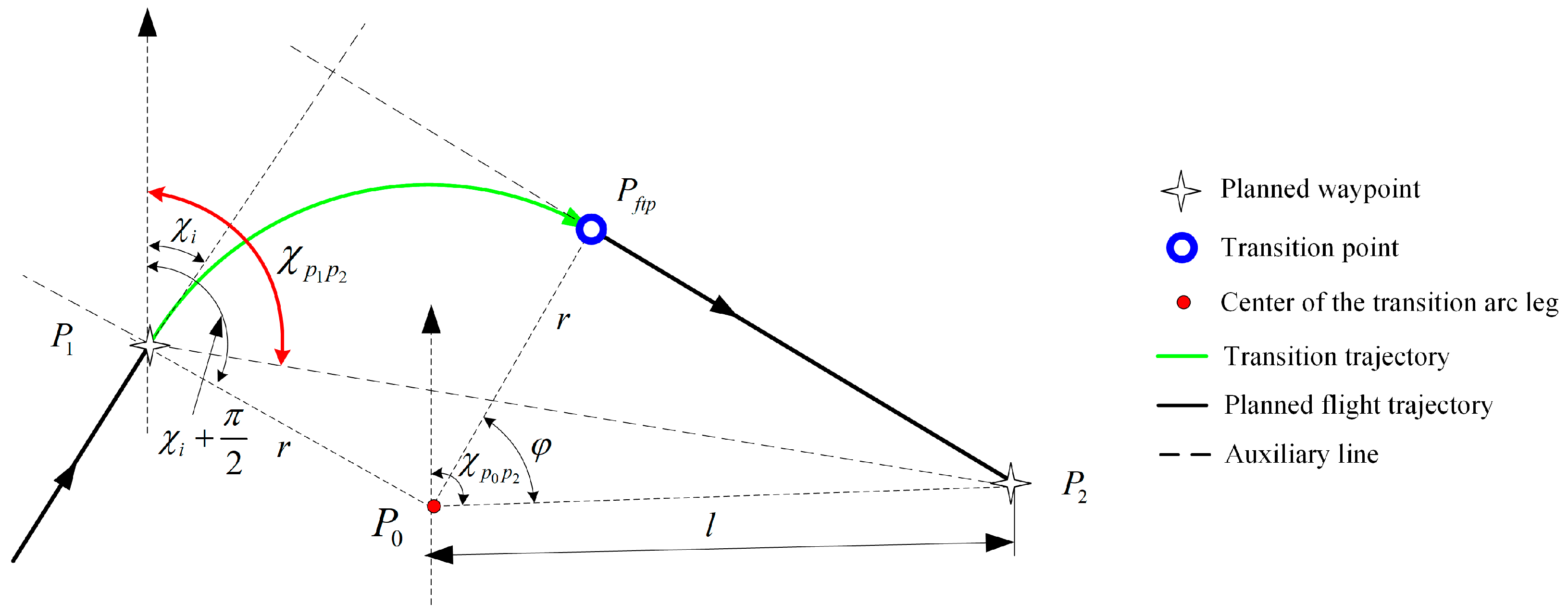
- (4)
- Direct transition
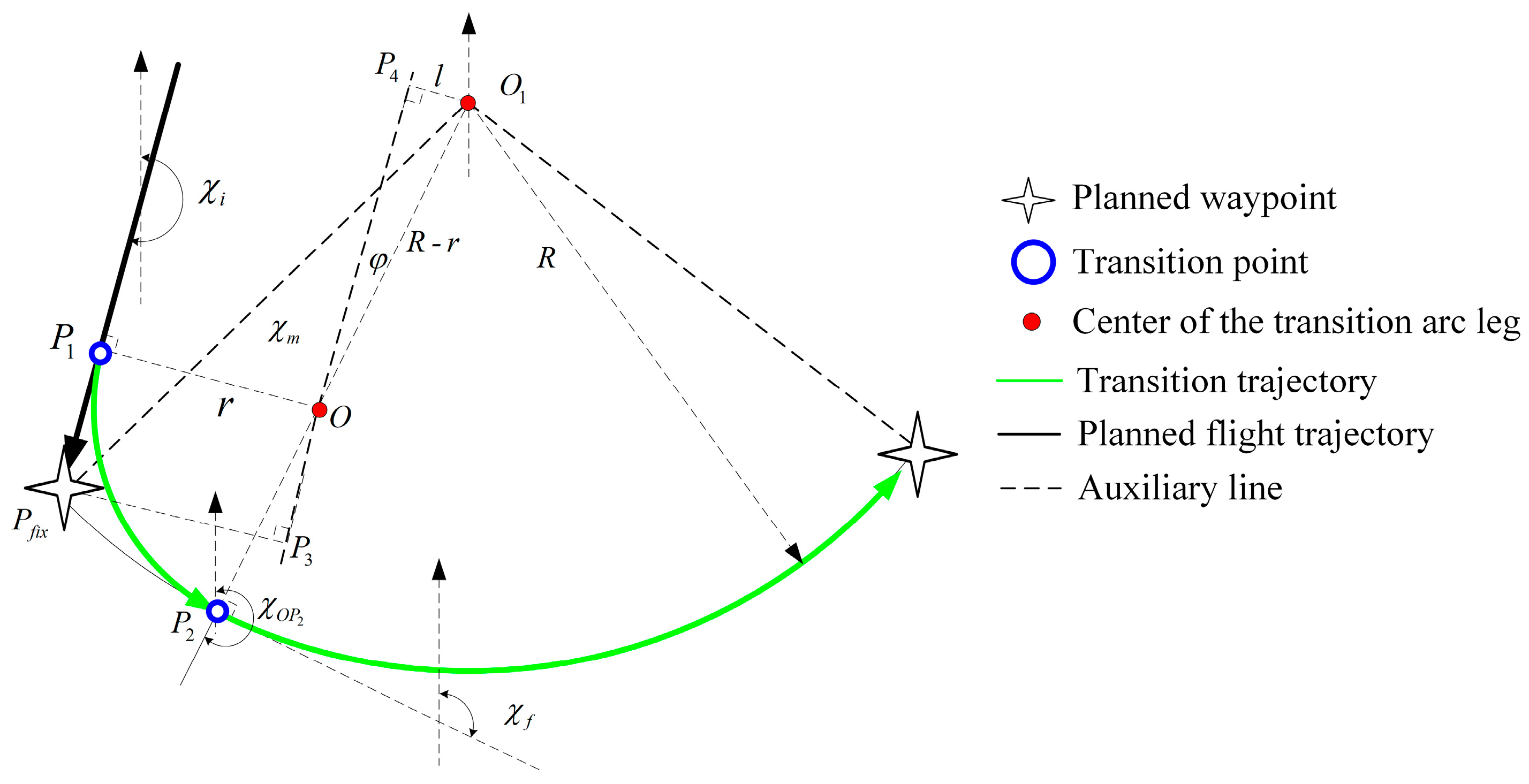
- (5)
- Arc interception
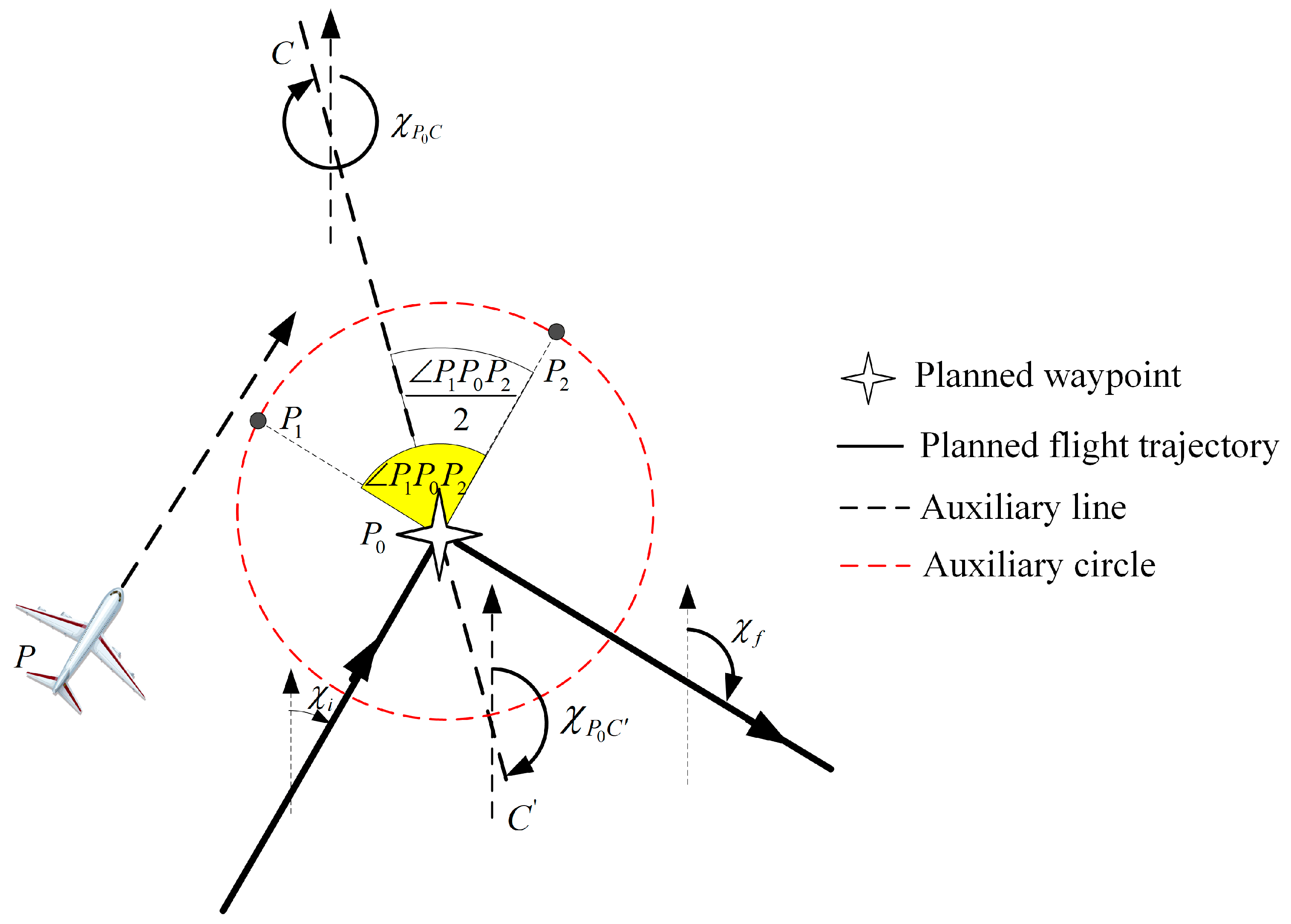
3.2. Lateral Segment Switching Strategy
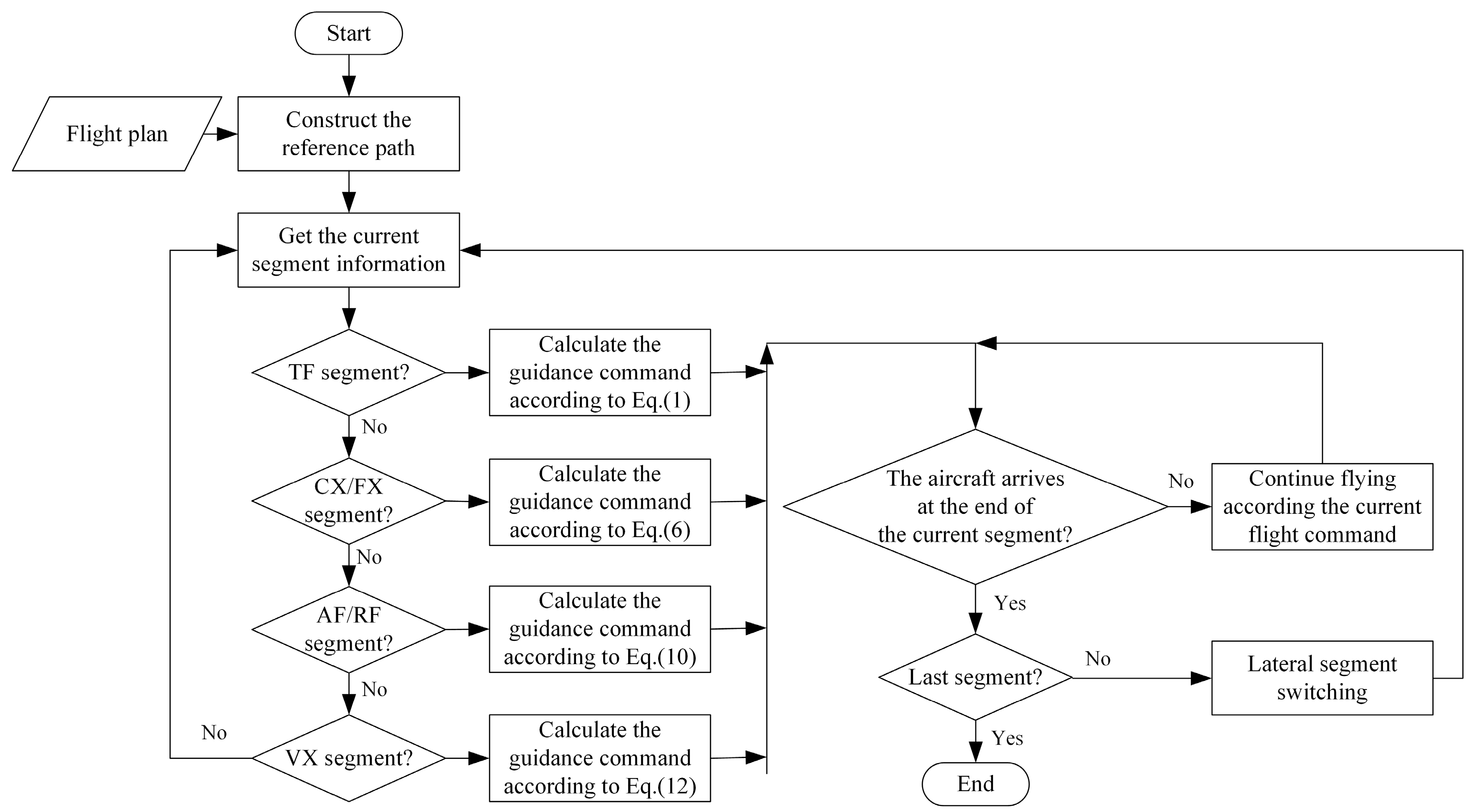
3.3. Automatic Flight Guidance Strategy Supporting RNP AR Approach Procedure
4. Simulation Verification
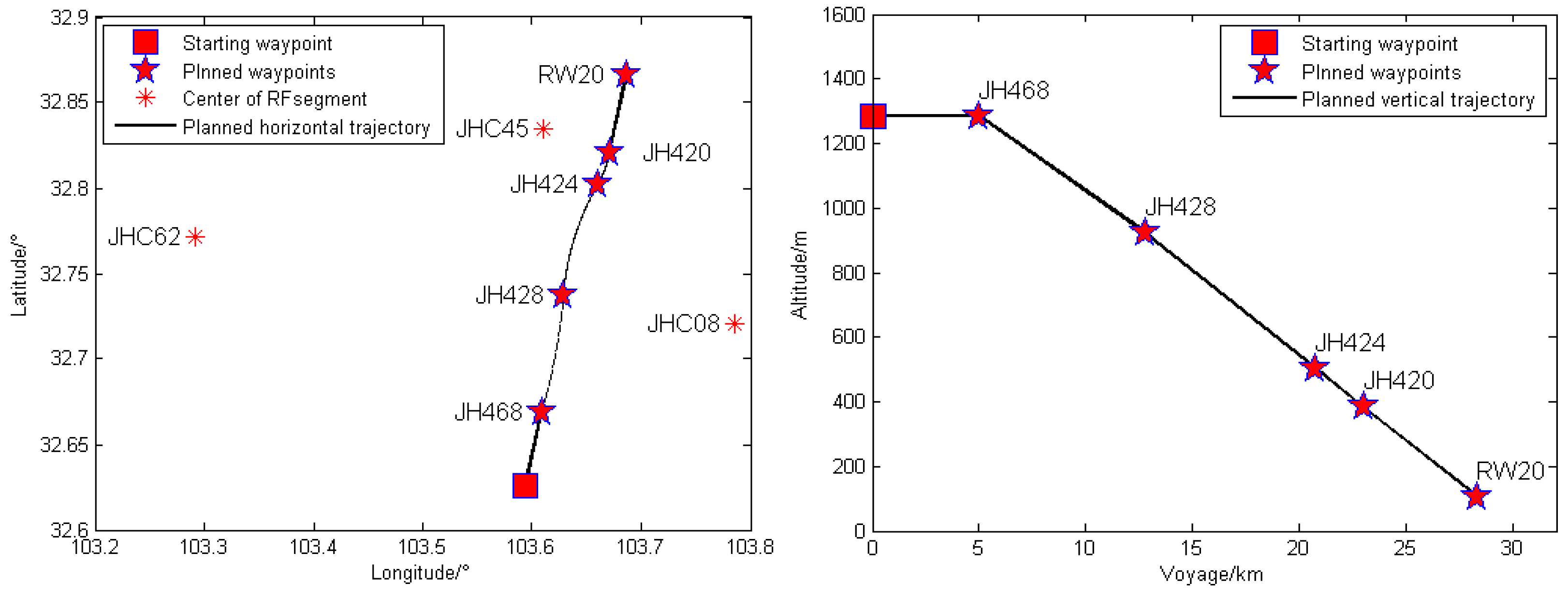
4.1. RNP AR Approach Procedure Flight Plan of Jiuzhai Huanglong Airport
4.2. Evaluation Indexes of the Guidance Effect
4.3. Simulation Conditions
- (1)
- The initial position of the aircraft is (32.6261°, 103.5940°), and the initial flight altitude is 1284.7 m.
- (2)
- The initial aircraft heading is 15.95°, and the initial indicated airspeed (IAS) is 82.3 m/s.
- (3)
- In the process of the RNP AR approach, the INS/GPS integrated navigation system is the main navigation source. In general, the error characteristics of GPS meet the first-order Markov process, and the positioning error model of GPS is shown as Equation (35).where is the longitude error, is the latitude error, and is the altitude error. , , and are the correlation times. , , and are driving white noise. These relative parameters are given in [20].
- (4)
- As for wind disturbance, referring to the precision approach requirements given in «Criteria for Approval of Category III Weather Minima for Takeoff, Landing, and Rollout» [21], the wind direction is subject to [0, 360°] uniform distribution variable, and the wind speed is subject to [0, 20 kt] uniform distribution variable.
- (5)
- The algorithm program is developed in the Windows 10 environment using MATLAB 2014a and Visual Studio 2013. In addition, the attribute of the processor is Intel(R) Core(TM) i5-9500 CPU @ 3.00 GHz, and the installed RAM is 16.00 GB.
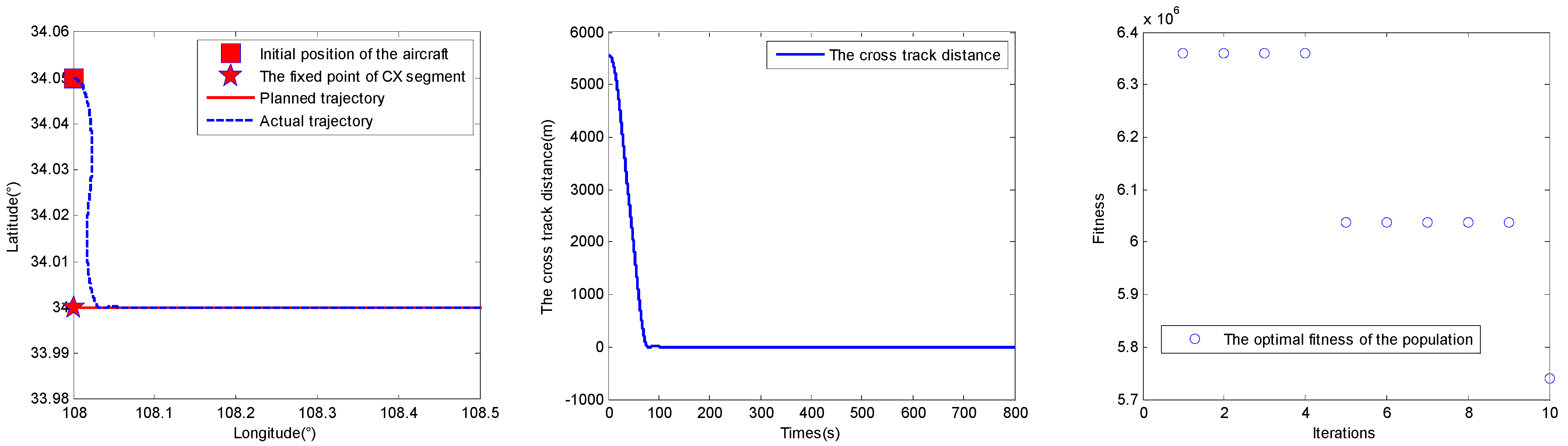
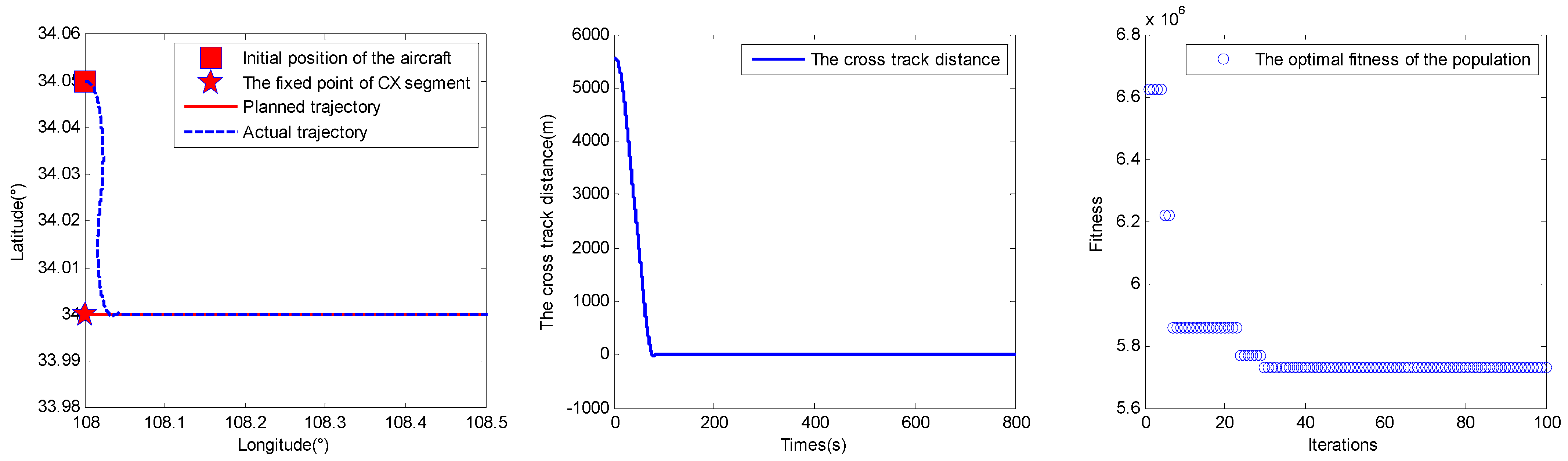
4.4. Verification of Guidance Parameter Tuning Method
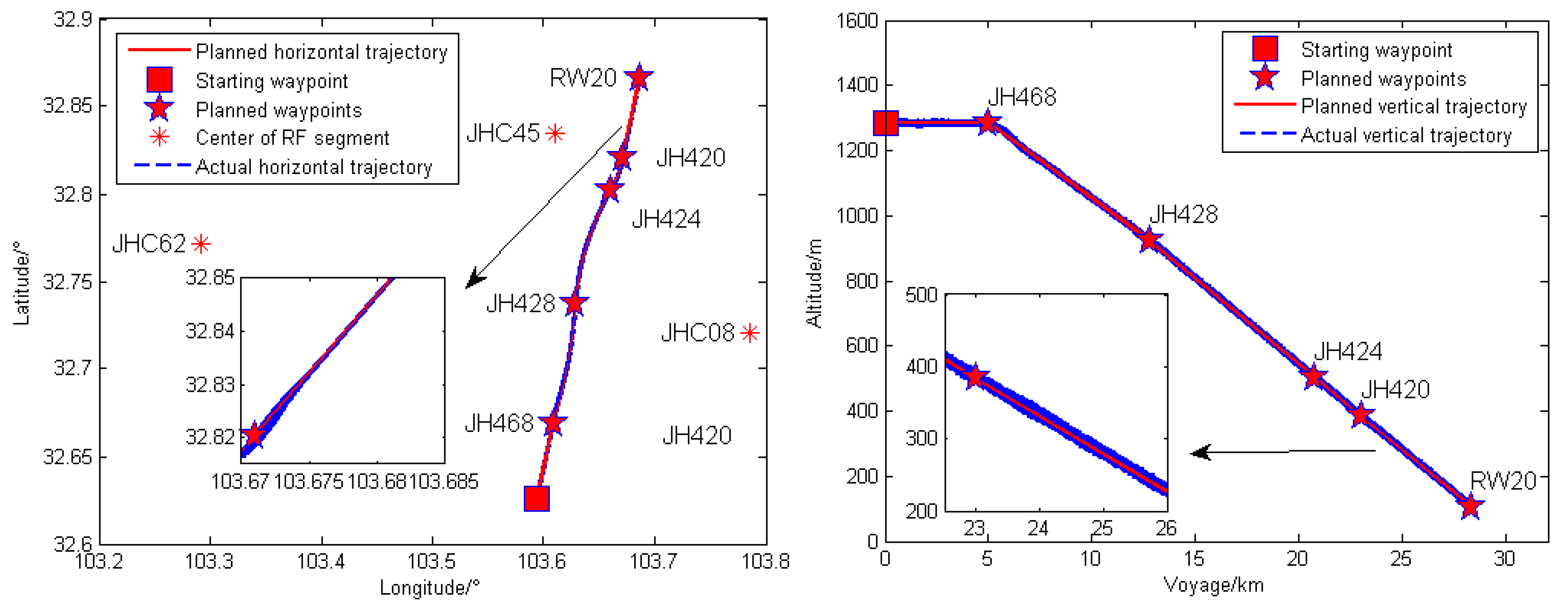
4.5. Verification of Guidance Command Generation Method
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lateral Segment Type | Description | |
|---|---|---|
| TF segment | Defines a great circle track over ground between two known databases fixes. | |
| CX segment | CA segment | Defines a specified course to a specified altitude at an unspecified position. |
| CD segment | Defines a specified course to a specific DME distance which is from a specific database DME navaid. | |
| CF segment | Defines a specified course to a specific database fix. | |
| CI segment | Defines a specified course to intercept a subsequent leg. | |
| CR segment | Defines a specified course to a specified radial from a specific database VOR navaid. | |
| FX segment | FA segment | Defines a specified track over ground from a database fix to a specified altitude at an unspecified position. |
| FC segment | Defines a specified track over ground from a database fix for a specific distance. | |
| FD segment | Defines a specified track over ground from a database fix to a specific DME distance which is from a specific database DME navaid. | |
| FM segment | Defines a specified track over ground from a database fix until manual termination of the leg. | |
| Lateral Segment Type | Description | |
|---|---|---|
| AF/RF segment | AF segment | Defines a track over ground at specified constant distance from a database DME navaid. |
| RF segment | Defines a constant radius turn between two databases fixes, at a specified constant distance from center fix. | |
| VX segment | VA segment | Defines a specified heading to a specified altitude termination at an unspecified position. |
| VD segment | Defines a specified heading terminating at a specific DME distance from a specific database DME navaid. | |
| VI segment | Defines a specified heading to intercept a subsequent leg at an unspecified position. | |
| VM segment | Defines a specified heading until a manual termination. | |
| VR segment | Defines a specified heading to a specified radial from a specific database VOR navaid. | |
References
- Chen, N.; Sun, Y.; Wang, Z.; Peng, C. Improved LS-SVM Method for Flight Data Fitting of Civil Aircraft Flying at High Plateau. Electronics 2022, 11, 1558. [Google Scholar] [CrossRef]
- Shao, Q.; Yang, M.; Xu, C.; Wang, H.; Liu, H. Fire risk analysis of runway excursion accidents in high-plateau airport. IEEE Access 2020, 8, 204400–204416. [Google Scholar] [CrossRef]
- Zhang, P.; Yang, L.; Zang, Z. Design Flow and Flight Safety of RNP-AR Flight Procedure in Civil Aviation Airport. In Proceedings of the 2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Changsha, China, 20–22 October 2021. [Google Scholar]
- Unkelbach, R.M.; Dautermann, T. Development and evaluation of an RNP AR approach procedure under tight airspace constraints. CEAS Aeronaut. J. 2022, 13, 613–625. [Google Scholar] [CrossRef]
- Unkelbach, R. Development of an RNP AR APCH approach procedure within tight airspace constraints. Ph.D. Thesis, Technische Universität Berlin, Berlin, Germany, 2021. [Google Scholar]
- Savas, T.; Sahin, O. Safety assessment of RNP AR approach procedures. Int. J. Sustain. Aviat. 2017, 3, 29–42. [Google Scholar] [CrossRef]
- Salgueiro, S.; Hansman, R.J. Potential Safety Benefits of RNP Approach Procedures. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- McDonald, J.; Kendrick, J. Benefits of tightly coupled GPS/IRS for RNP operations in terrain challenged airports. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 6–8 May 2008. [Google Scholar]
- Sahin, O.; Turgut, E.T.; Aslaner, S.; Usanmaz, O. Fuel and carbon dioxide emission assessment for a curved approach procedure. J. Aircr. 2019, 56, 2108–2117. [Google Scholar] [CrossRef]
- Marheim, J.A.; Hengebol, P.; Newman, M.J. Performance based navigation (PBN) as a noise abatement tool. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Chicago, IL, USA, 26–29 August 2018. [Google Scholar]
- Morscheck, F. Noise mitigation optimization of A-RNP/RNP AR approaches. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Entzinger, J.O.; Nijenhuis, M.; Uemura, T. Assessment of human pilot mental workload in curved approaches. In Proceedings of the 2013 Asia-Pacific International Symposium on Aerospace Technology (APISAT), Takamatsu, Japan, 20–22 November 2013. [Google Scholar]
- Gouldey, D. Determining operational benefits of required navigation performance (RNP) authorization required (AR) approaches. In Proceedings of the 2014 Integrated Communications, Navigation and Surveillance Conference (ICNS) Conference Proceedings, Herndon, VA, USA, 8–10 April 2014. [Google Scholar]
- Amai, O.; Matsuoka, T. Air traffic control real-time simulation experiment regarding the mixed operation between RNP AR and ILS approach procedures. In Proceedings of the 2015 International Association of Institutes of Navigation World Congress (IAIN), Prague, Czech Republic, 20–23 October 2015. [Google Scholar]
- Dautermann, T.; Ludwig, T.; Altenscheidt, L.; Geister, R.; Blase, T. Automatic speed profiling and automatic landings during advanced RNP to xLS flight tests. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017. [Google Scholar]
- ARINC424-21; Navigation System Database ARINC SPECIFICATION 424-21. AEEC: Reston, VA, USA, 2016.
- Zhai, S.; Li, G.; Jia, Q.; Li, Z.; Cai, W. Design of Guidance Law for Automatic Landing Meeting the CAT III Standard. In Proceedings of the Asia-Pacific International Symposium on Aerospace Technology (APISAT), Jeju, Korea, 15–17 November 2021. [Google Scholar]
- RTCA DO-236B; RTCA DO-236B Minimum Aviation System Performance Standards: Required Navigation Performance for Area Navigation. Radio Technical Commission for Aeronautics: Washington, DC, USA, 2003.
- International Civil Aviation Organization. Doc 9905 Required Navigation Performance Authorization Required (RNP AR) Procedure Design Manual; International Civil Aviation Organization: Montreal, QC, Canada, 2009. [Google Scholar]
- Qin, Y.; Zhang, H.; Wang, H. Kalman Filter and Integrated Navigation Theory, 3rd ed.; Northwestern Polytechnical University Press: Xi’an, China, 2015; pp. 292–294. [Google Scholar]
- AC 120-28D; AC 120-28D Criteria for Approval of Category III Weather Minima for Takeoff, Landing, and Rollout. Federal Aviation Administration: Washington, DC, USA, 1999.


















| Symbol | Variate |
|---|---|
| population size | |
| iterations | |
| position of the ith particle in jth iteration | |
| maximum position of particles | |
| minimum position of particles | |
| velocity of the ith particle in jth iteration | |
| maximum velocity of particles | |
| minimum velocity of particles | |
| acceleration coefficient of the self-recognition | |
| acceleration coefficient of the social | |
| inertial weight | |
| maximum inertial weight | |
| minimum inertial weight | |
| fitness | |
| fitness of the ith particle in jth iteration | |
| historical optimal fitness of the ith particle | |
| historical optimal fitness of the population |
| Waypoint Index | Starting Waypoint | JH468 | JH428 | JH424 | JH420 | RW20 |
|---|---|---|---|---|---|---|
| Latitude/° | 32.6261 | 32.6693 | 32.7370 | 32.8023 | 32.8022 | 32.8661 |
| Longitude/° | 103.5940 | 103.6087 | 103.6286 | 103.6603 | 103.6709 | 103.6865 |
| Altitude/m | 1284.73 | 1284.73 | 922.63 | 503.83 | 384.05 | 106.70 |
| IAS/(m/s) | 82.3 | 82.3 | 82.3 | 82.3 | 82.3 | 82.3 |
| Leg type | IF | TF | RF | RF | RF | TF |
| Turn Direction | \ | \ | left | right | left | \ |
| Center of RF segment | \ | \ | JHC62 | JHC08 | JHC45 | \ |
| Center latitude/° | \ | \ | 32.7714 | 32.7207 | 32.8349 | \ |
| Center longitude/° | \ | \ | 103.2921 | 103.7854 | 103.6101 | \ |
| Leg length/km | \ | 4.999 | 7.795 | 7.944 | 2.246 | 5.309 |
| RNP/n mile | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Zhai, S.; Li, G.; Hou, M.; Jia, Q. Generation of Guidance Commands for Civil Aircraft to Execute RNP AR Approach Procedure at High Plateau. Aerospace 2023, 10, 396. https://doi.org/10.3390/aerospace10050396
Yang L, Zhai S, Li G, Hou M, Jia Q. Generation of Guidance Commands for Civil Aircraft to Execute RNP AR Approach Procedure at High Plateau. Aerospace. 2023; 10(5):396. https://doi.org/10.3390/aerospace10050396
Chicago/Turabian StyleYang, Le, Shaobo Zhai, Guangwen Li, Mingshan Hou, and Qiuling Jia. 2023. "Generation of Guidance Commands for Civil Aircraft to Execute RNP AR Approach Procedure at High Plateau" Aerospace 10, no. 5: 396. https://doi.org/10.3390/aerospace10050396