
Air Traffic Complexity Evaluation with Hierarchical Graph Representation Learning

Abstract
:1. Introduction
- Poor timeliness of complexity feature sets: The performance of machine learning models is directly correlated with the quality of feature sets, and the traditional 28-indicator set was proposed more than 10 years ago, which is incompatible with the fast-expanding ATM system and the continually evolving algorithmic frameworks. Furthermore, the potential complexity features may not be explored.
- Diversified sectors with distinct functions and structures, such as the approach control sector (SA) and the en-route control sector (SR), cannot be subjected to a fixed set of complexity-influencing variables. The common collection of feature factor sets disregards sector distinctions and cannot fully depict the ATS within a sector. In Appendix A, disparities between sectors are discussed.
- High cost of model manual front-loading: In terms of feature acquisition, construction using flight data is limited by challenges such as high computational cost, limited data sources, and a high demand for expertise. If the generation of feature sets is inadequate or there are computing faults, the model’s capability will be weakened.
- The feature pattern transformation technique requires improvement: Since the multi-channel picture approach has no need to calculate the complexity factor set, generating multi-channel images is pretty tough and may induce noise. The aviation network graph approach only considers the aircraft’s relative location while forming the graph, totally disregarding the flight trend’s effect on complexity, which hinders the accuracy of the obtained graph theory indicators (average node degree, average clustering coefficient, etc.).
- The feature selection perspective is unsatisfactory: Many of the features in the existing methods are extracted from the flight attributes, while CL and ATC are inextricably linked. The model will be less accurate and less interpretable if it lacks ATCO behavior elements.
- A general model for airspace sector complexity evaluation based on HGRL was developed in order to thoroughly and efficiently capture ATS characteristics and effectively identify sector CL automatically.
- The brand-new data structure, namely ATSG, was created in response to the airspace traffic scenario, which integrates aircraft operating attributes and proximity trends to appropriately depict ATS.
- From the perspective of ATCO–aircraft interaction, the complexity feature is expanded, and the unprecedented combination of aircraft operation and ATCOI as the affecting component of sector complexity enhances the accuracy of the model.
- An effective graph structure learning module utilizes node feature information and graph topology information to emphasize the relevance of key aircraft nodes for graph-level ATSG representation.
- Using realistic control scenarios and flight data, the approach is validated. Experiment results on SA and SR indicate that our method outperforms previous benchmarks and is applicable to both types of sectors with a certain extent of generalizability.
2. Problem Description and Method Overview
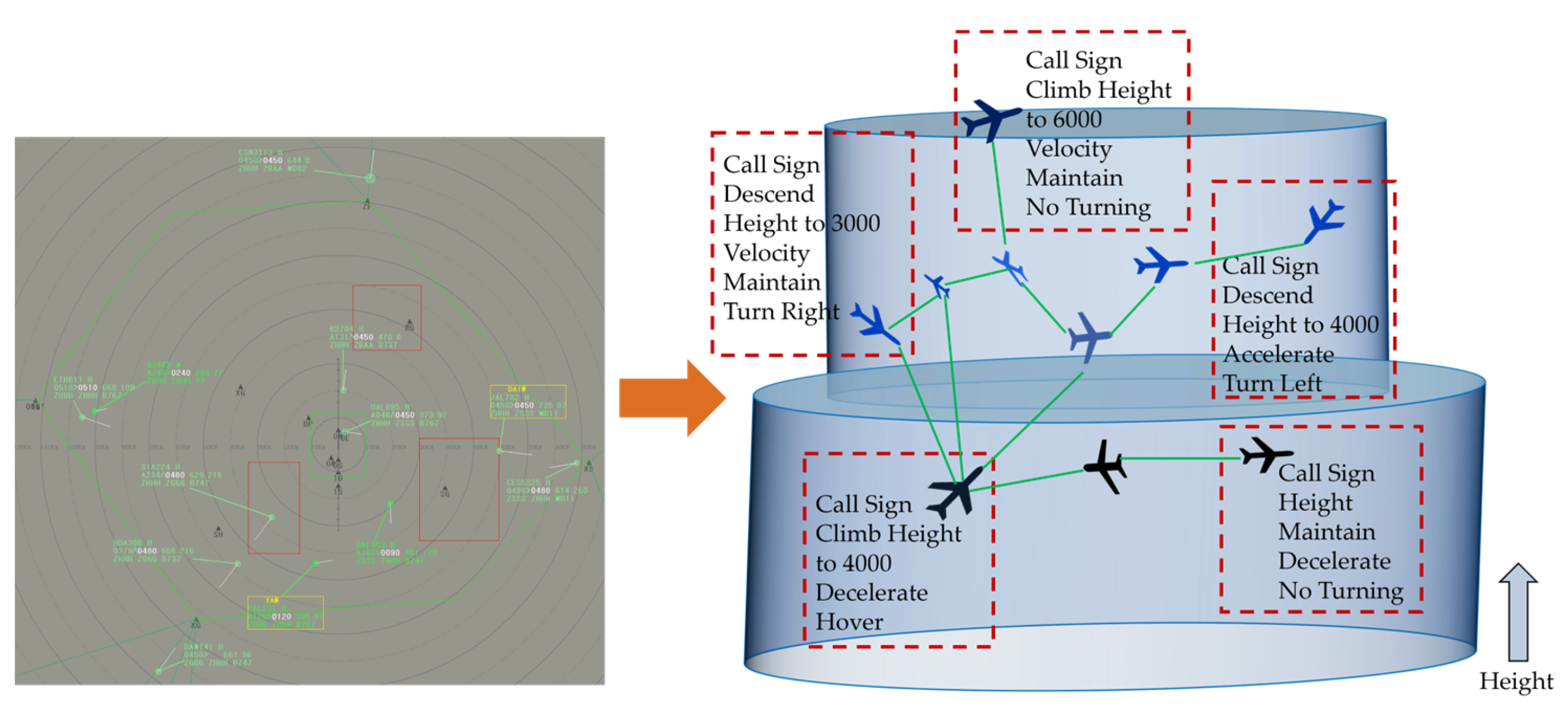
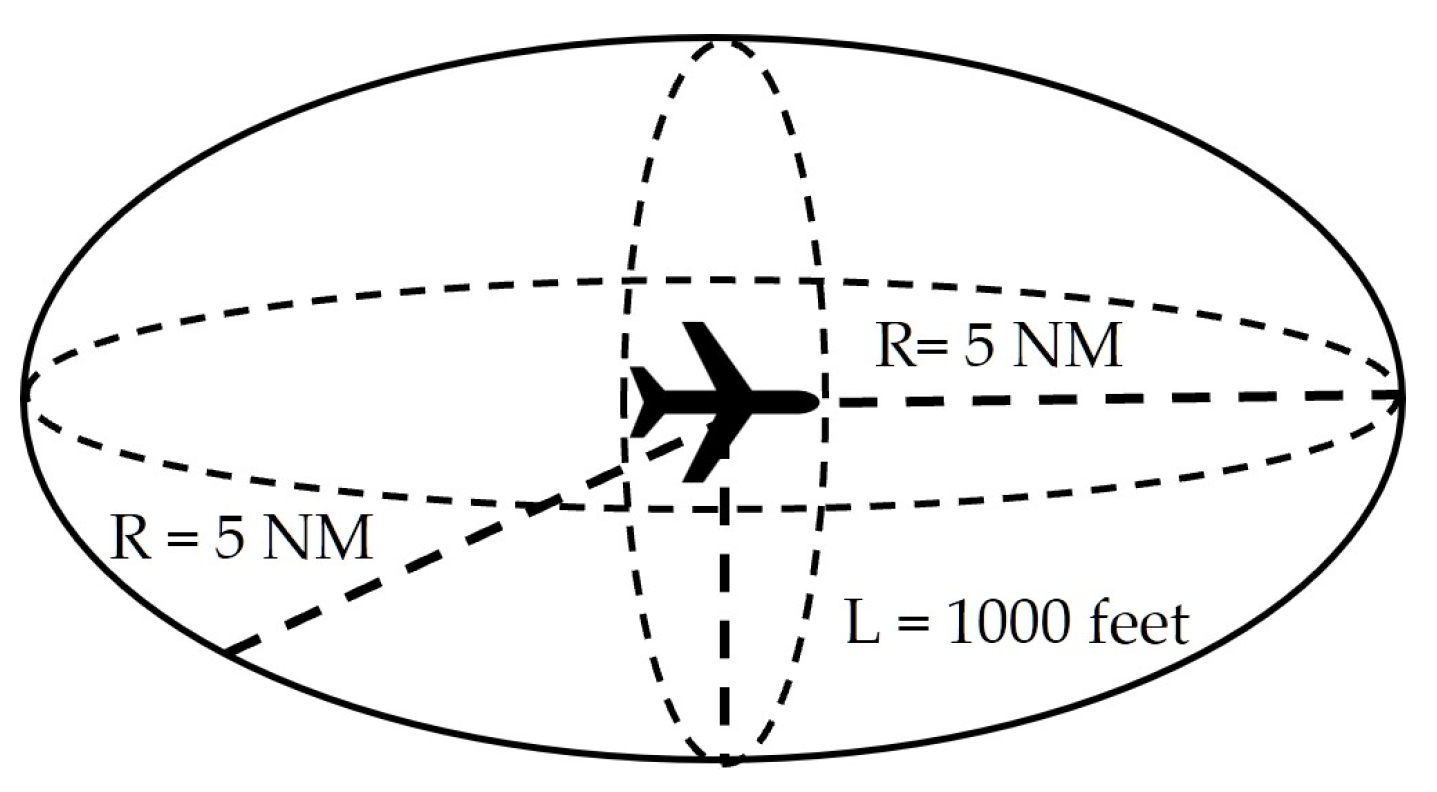
- Establish an ATSG capable of fully reflecting the comprehensive information of space location and the approaching trend between aircrafts. ATCO’s primary responsibility is to resolve conflicts, avoid possible conflicts, and minimize negative chain effects following the delivery of instructions. Therefore, in order to prevent the occurrence of conflict false alarms, which will increase the ATCOs’ workload, it is important to develop a flight network that can effectively detect the conflict connection in three-dimensional space and meet the actual flight safety boundary criteria.
- The assessment model for ATCS complexity must be able to describe a substantial amount of training data. Moreover, when employing GNN, we should save as much information as possible on the topology of ATSGs. The sector CL is mostly influenced by the correlation between aircraft pairs as opposed to the inherent information of individual nodes. In a nutshell, the final performance of the model depends heavily on its structure design. The degree of structural information retention must be considered, as well as the existence of noise information.
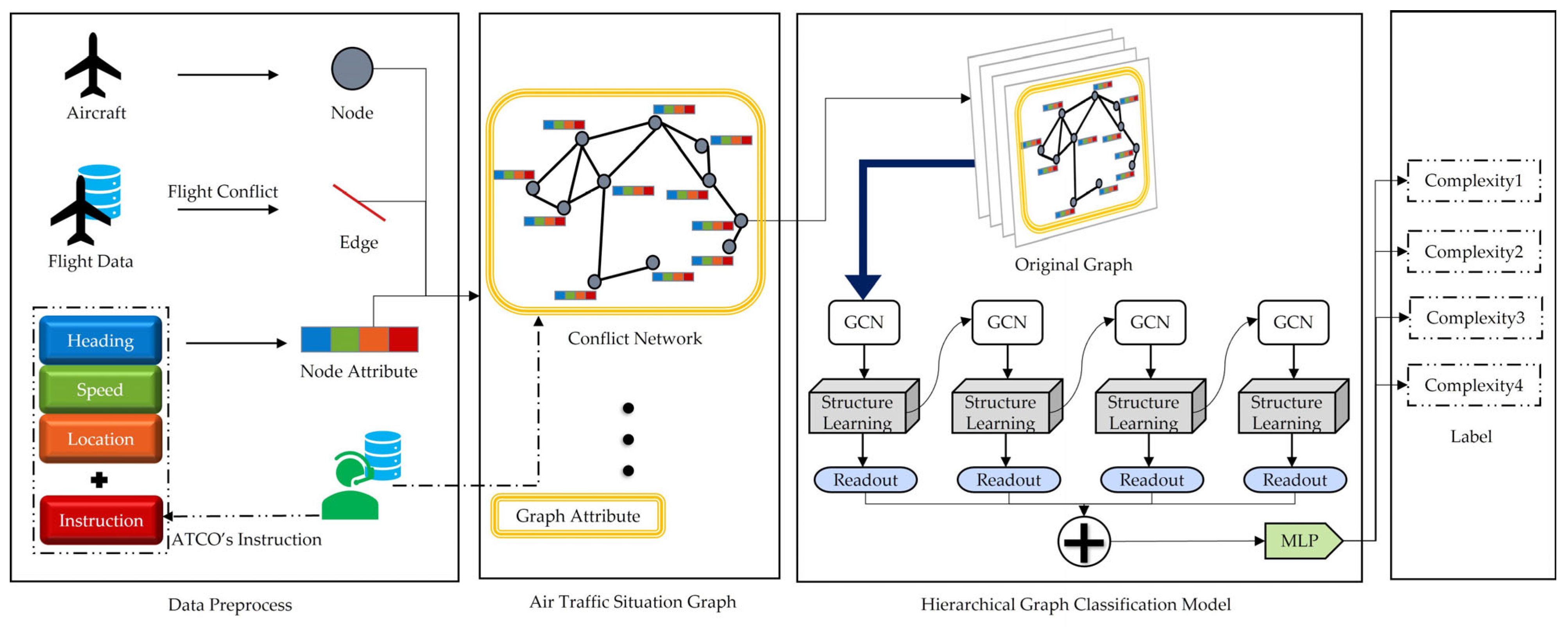
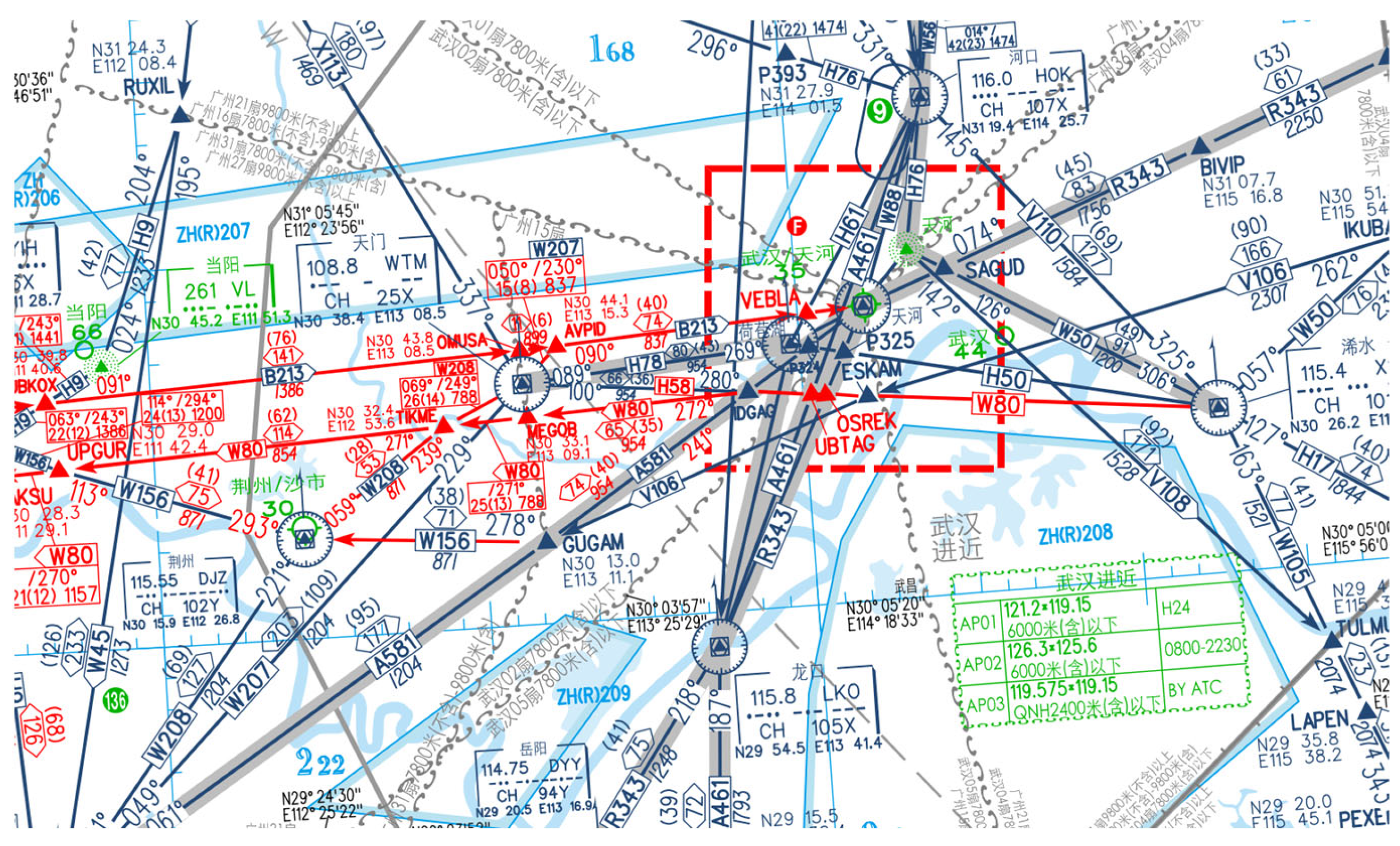
- Data Preprocess: Automatic Dependent Surveillance–Broadcast (ADS-B) transmission equipment was used to gather the sector’s dynamic data, which covered the primary trajectory information and a richness of aircraft operation data. Before converting air traffic scenarios into ATSGs, we collected the relevant instructions from ATCOs and requested that they rank and label their complexity.
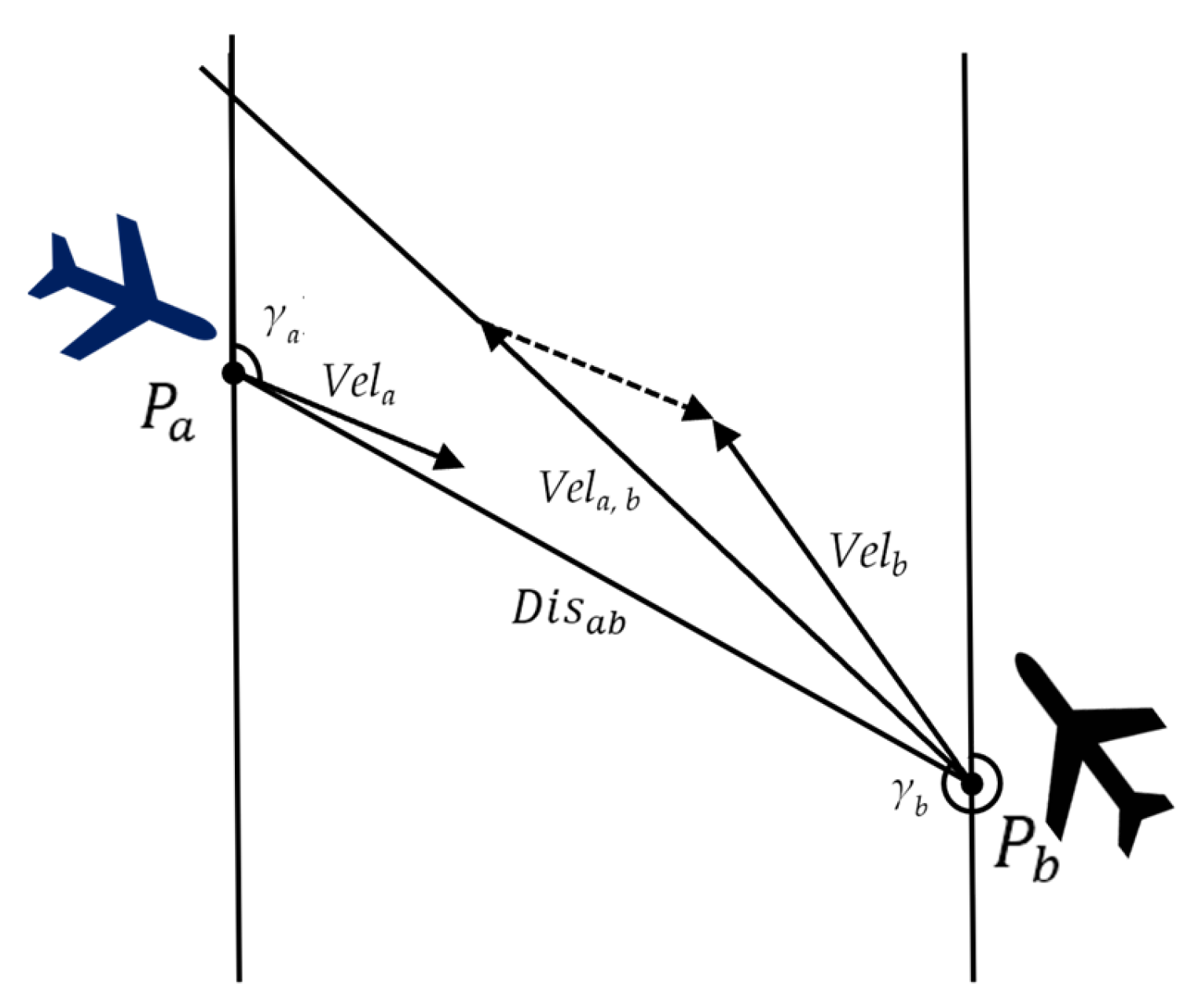
- Flight Conflict Network Construction: In order to further describe the current state of the airspace, the next step was to construct an FCN that was based on actual and potential conflict links between aircraft. In the majority of flight state networks, the interdependency between aircraft is merely connected to the conventional safety distance. In reality, the relative speed between two aircraft is also a crucial criterion for assessing the conflict scenario. Therefore, relative speed is a factor that we have considered while constructing a flight state network.
- Hierarchical Graph Classification Model: The FCN constructed in the unit of one minute was modeled as an ATSG, which comprises the node attribute and the entire graph attribute. Inputting enough ATSGs into the proposed hierarchical graph representation model (HGRM), which includes several graph convolutional layers, pooling layers, and multi-layer perceptron (MLP), will yield the output label data (sector CL).
3. Methodology
3.1. Materials
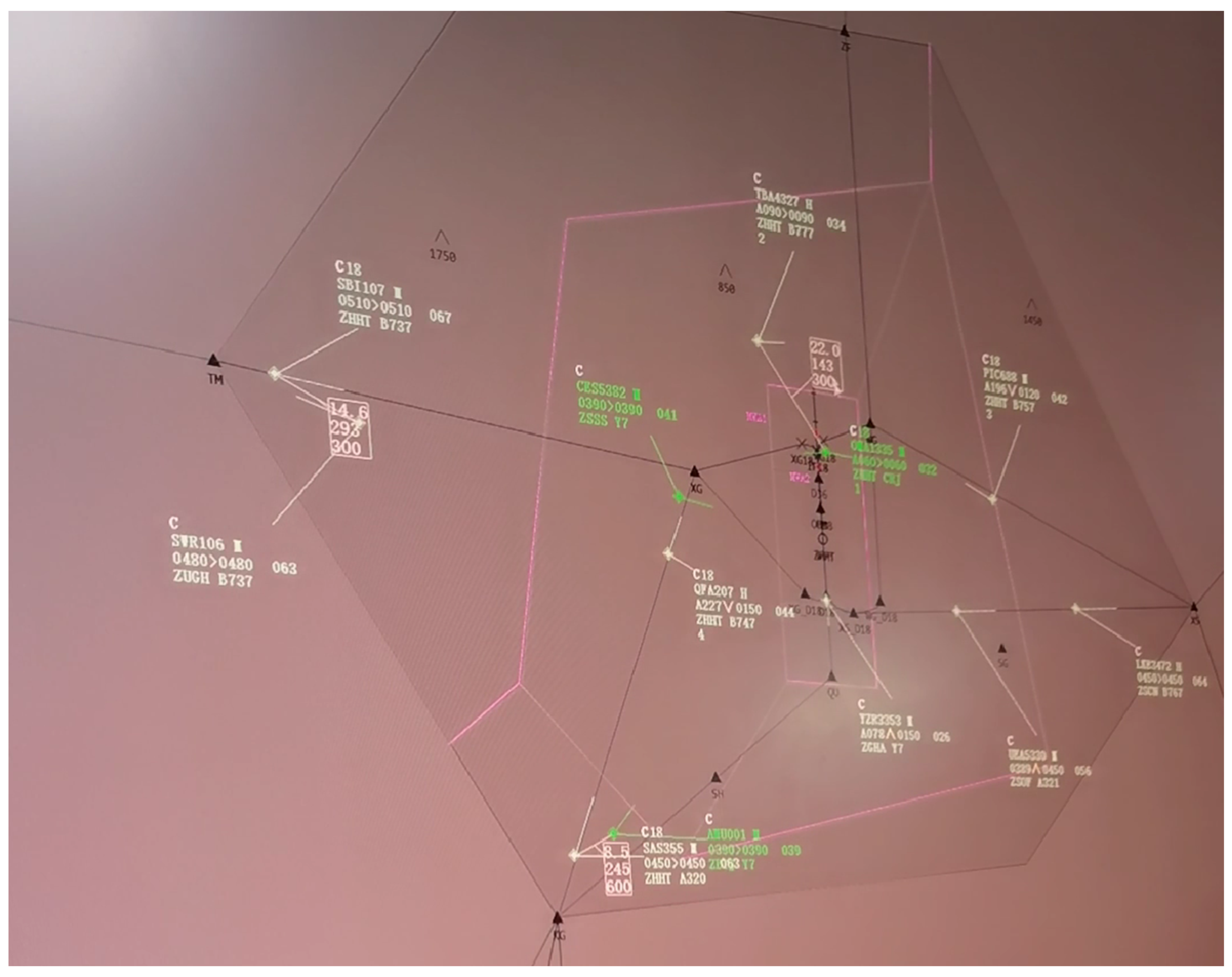
- Complexity Feature Set: The ADS-B data used for this study are updated each second. However, because the operational complexity of the airspace does not vary significantly over short intervals, modeling the air traffic scenes per second directly would generate a large amount of sample data with similar complexity, resulting in data redundancy and a high computational burden. Therefore, we employed the common principle of the coarse granularity processing of trajectory data (in preparation for the next step in constructing the ATSG) by dividing time into 1-min intervals, as was employed in previous research [34,36,37,38,39,46]. In actuality, it is difficult to obtain ATCOs’ speech collection. To address this issue, real ADS-B data were inputted into the control simulator for realistic scenario restoration, and 3 senior ATCOs were invited to obtain command data, which were characterized according to the ATCOI classification principles discussed in the following section of the paper. Multiple instructions are frequently issued to the same aircraft within a 1-min interval, so we used the most recent ATCOI as the effective complexity feature rather than the previous ATCOI since the timeliness of the feature description cannot be guaranteed for the previous ATC situation.
- Complexity Tag Set: Present machine learning-based traffic complexity assessment research uses two primary labeling strategies: one is based on the actual split or merger state of the sector to reflect the complexity of sector operation [53], which can be obtained automatically from historical control data records, and the other is based on a manually collected CL, which is traditionally used as a 3-level label (low, medium, high) [34,36,37,46]. Although better results have been achieved in terms of assessment accuracy, this 3-level form provides limited information in actual control scenarios, making it challenging to provide decisionmakers with more detailed information as well as being an overly simplistic and crude approach. Due to the increase in existing traffic demand, the airspace sector frequently has abnormally high traffic complexity for the majority of the time. However, the traffic complexity does not typically reach the maximum level without exceeding the controller’s workload guarantee, so the optimal position for such a state of traffic complexity should be between medium and high. Consequently, a modest increase in CL level numbers may have a greater potential value in practical applications.
3.2. Air Traffiic Control Instruction Extraction
3.3. Flight Conflict Network Construction
3.4. Hierarchical Graph Classification Model
3.4.1. ATSG Representation
3.4.2. Graph Neural Networks
3.4.3. Structure Learning and Pooling Layers
4. Experiment and Analysis
4.1. Data Preparation
4.2. Evaluation Metric
4.3. Experiment Configuration
4.4. Experiment Result
- Global pooling: To demonstrate the efficacy of the hierarchical pooling structure for the ATSG. Methods such as the GCN [47], GAT [63], GraphSAGE [64], and GIN [65] are representative GNNs built to learn coherent node-level representations. Using the suggested readout function as the final graph features, all the methods in this category gather the node features learned by the four learning layers and then feed them into the proposed MLP structure for classification.
- Hierarchical pooling: For the purpose of learning graph level representations, this group considers further models that mix GNNs with pooling operations. As comparison baselines, we make use of three popular ones: DiffPool [66], ASAP [67], and MinCutPool [68]. In DiffPool, at each hierarchical tier, a GNN model is executed to produce node embeddings. These methods coarsened the network in diverse ways. To integrate sub-graphs into the pooled graph, they acquired varied cluster assignment techniques for nodes after each layer. These procedures were repeated for four layers, and the graph is classified based on the final output representation.
- Proposed method: To further see how effective our suggested HGRL is, we examined a new version here. HGRL-NCI (non-ATCOI) follows the very same structure as HGRL. To evaluate the validity of the inclusion of ATCOI characterization within each graph, however, the ATCOI features were omitted in the model’s input.
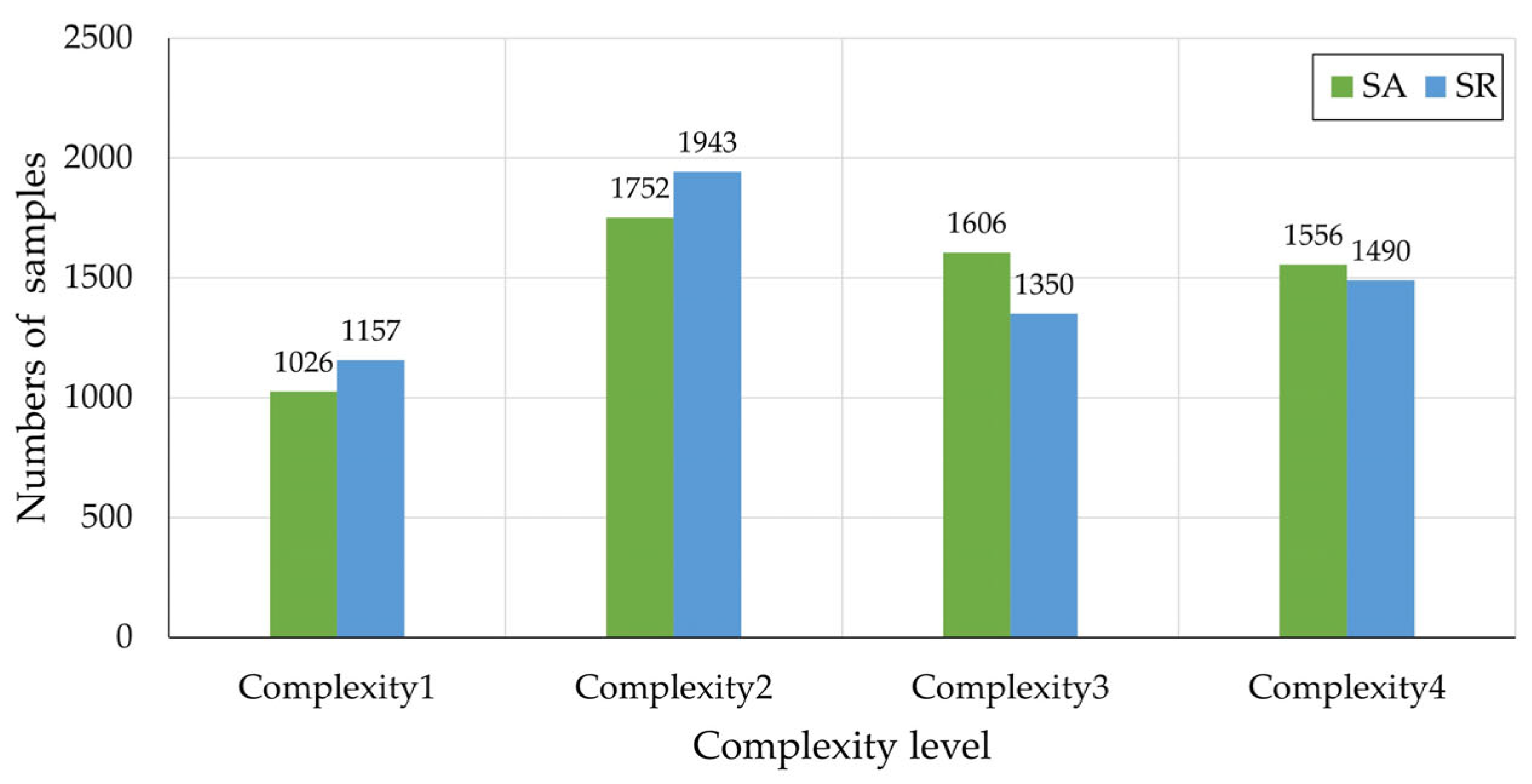
- In conclusion, on the three performance criteria (, , and ), the GNN-based approaches perform better than the hand-crafted feature methods, with our HGRL achieving the best results. The primary distinction between the two types of approaches resides in their respective used features. Among these, the GNN-based technique automatically extracts characteristics from ATSGs using neural networks with various architectures. Figure 9 provides a good illustration of the experimental sample data distribution. In SA and SR, the proportion of CL-level samples is roughly 5:9:8:8 and 4:6:4:5, respectively. The Macro-F1-score was chosen as the performance indicator since there are a substantial number of samples in each category—nearly 6000—despite the fact that the value distribution is not perfectly balanced. Owing to the rather uniform distribution of the dataset, the and do not differ much (the production of the takes into account the data distribution in situations involving severely unbalanced datasets).
- Possible reasons for the BPNN and SVM’s poor performance involve: the chosen indicators are not appropriate to the sectors in the experiment and cannot correctly capture the dynamic flight information in the sectors. The static structure and traffic operation of various airspaces may be highly varied, which may result in varying operational complexity feature sets applicable to various sectors. Consequently, it is obviously inappropriate to develop a collection of immutable complexity feature index systems for application in different airspace sectors. The outcome reveals that the current hand-crafted features may be inadequate for depicting sector complexity, and that the GNN-based technique may extract useful information from the produced ATSGs.
- The built ATSG can properly represent the variables that influence the sector’s complexity. As can be seen, the of the global pooling group was almost 10% more than that of the prior group. The GCN has the best performance in both the SA and SR sectors in the global pooling group, with exceeding 76%. However, we also find that the global pooling group is unable to provide satisfactory outcomes. We believe that the primary cause is that when merging node representations universally, the ATSG structure feature is ignored, which is the most important factor in revealing aircraft awareness of the conflict. This further validates the need for adding the hierarchical pooling module.
- Hierarchical feature extraction helps significantly minimize information loss during the ATSG’s feature extraction procedure. In the third category, the listed approaches prevent sub-graph structure loss or even misrepresentation produced by the single-time pooling method, which compresses all node characteristics into a single graph feature vector. Obviously, they improve classification performance significantly. We see that hierarchical pooling models may attain relative superior performance compared to the majority of baselines, demonstrating the efficacy of the hierarchical pooling strategy. ASAP outperforms its competition, a sparse and differentiable pooling approach that utilizes an improved GNN formulation to determine the significance of every single node in a certain graph. Clearly, our suggested HGRL performs better than ASAP across all evaluation measures.
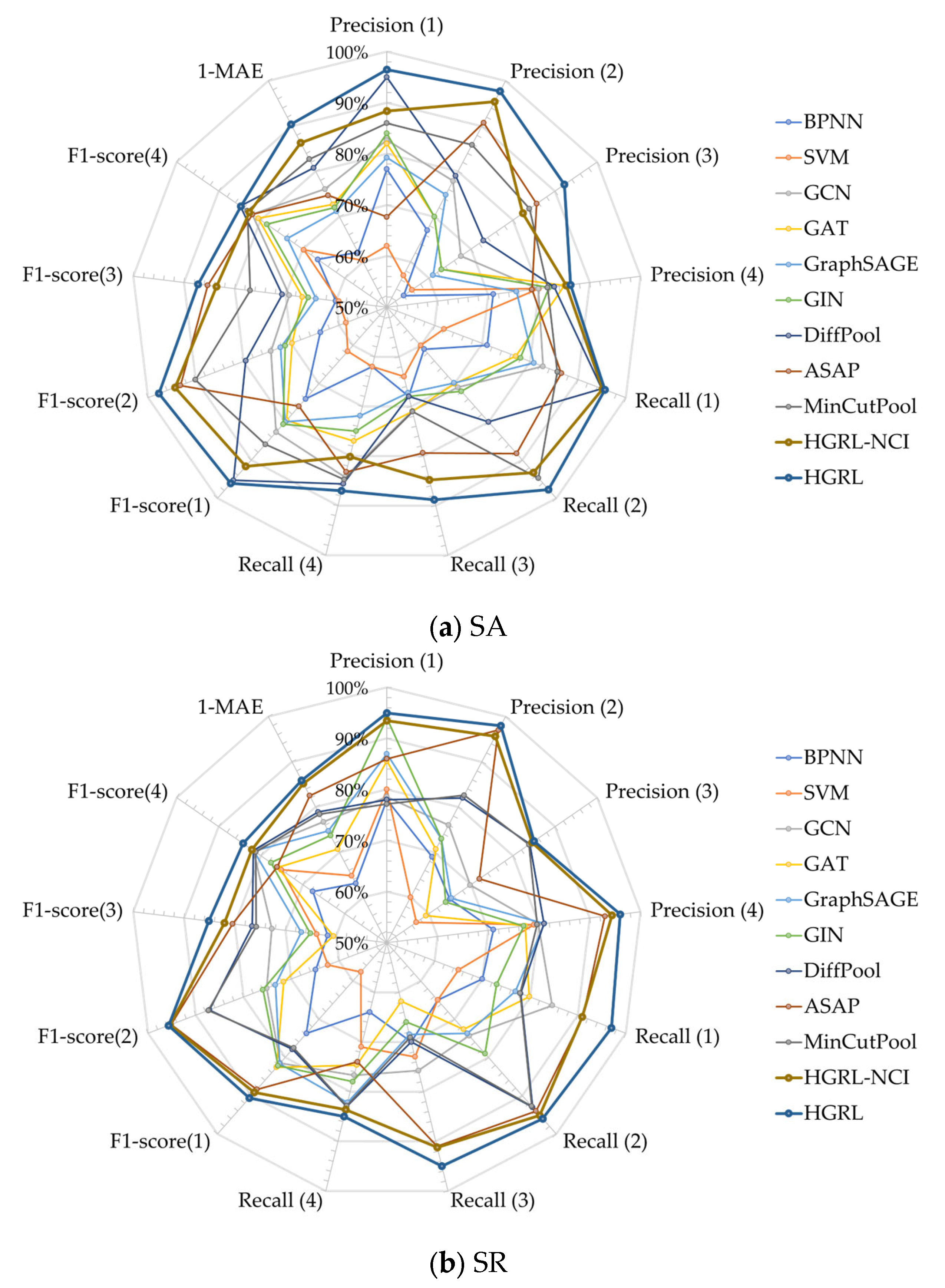
- The incorporation of ATCOI may effectively enhance the performance of the suggested classification model; the of HGRL in SA even surpassed 90%. Comparing the experimental results of HGRL-NCI and HGRL reveals that the combination of airspace traffic situation information and ATCOI has a greater effect than using only trajectory data. Due to the fact that the combination of the two includes more information and may have a synergistic impact to jointly portray the sector’s complexity, the combination of them is preferable. Furthermore, ATCOI is directly tied to the ATC workload, resulting in a more precise categorization of sector CL.
- HGRL can mitigate the issue of class imbalance to some degree. The radar map (Figure 11) reveals that the two biggest polygon areas are based on HGRL structure. In contrast, the outcomes of other approaches suffer from sample set class-imbalance. Compared to CL1 and CL2, CL3 and CL4 generate a greater workload and are among the few severe instances seen in normal work. Consequently, numerous baselines’ performance on CL3 and CL4 has been unstable. Our suggested model outperforms the competition in terms of both overall performance and each CL degree. At the same time, HGRL can still obtain a relatively higher precision despite the imbalance of samples in sectors with various functions, demonstrating that our methodology has significant generalization potential. Even without the additional characterization provided by ATCOI, the HGRL received an excellent evaluation performance. The identification accuracy was as high as 88.05%, beating by a wide margin machine learning algorithms that employ conventional criteria.
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ATM | Air Traffic Management |
| ATCS | Air Traffic Control Sector |
| FCN | Flight Conflict Network |
| ATSG | Air Traffic Situation Graph |
| ATCOI | Air Traffic Control Instruction |
| GNN | Graph Neural Network |
| HGRL | Hierarchical Graph Representing Learning |
| ATS | Air Traffic Situation |
| ATCO | Air Traffic Controller |
| ICAO | International Civil Aviation Organization |
| ASBU | Aviation System Block Upgrade |
| NextGen | Next Generation Air Transportation System |
| SES | Single European Sky |
| DD | Dynamic Density |
| BPNN | Backpropagation Neural Network |
| Adaboost | Adaptive Boosting |
| CL | Complexity Level |
| CNN | Convolutional Neural Network |
| ETMS | Enhanced Traffic Management System |
| SA | Approach Control Sector |
| SR | En-route Control Sector |
| GCN | Graph Convolutional Neural Network |
| ADS-B | Automatic Dependent Surveillance–Broadcast |
| HGRM | Hierarchical Graph Representation Model |
| MLP | Multi-Layer Perceptron |
| FIR | Flight Information Region |
| HITL | Human-in-the-Loop |
| ISG | Induced Sub-Graph |
| NIS | Node Information Score |
| GMT | Greenwich Mean Time |
| ACC | Accuracy |
| MAE | Mean Absolute Error |
| SVM | Support Vector Machine |
| GAT | Graph Attention Network |
| GIN | Graph Isomorphism Network |
| ASAP | Adaptive Structure Aware Pooling |
Appendix A
- The corresponding airspace structure of the sector, including the distribution of routes, restricted areas, danger zones, restricted areas segregated by military activities, the distribution of waiting areas, and the locations of key navigation stations, position reporting points, and route intersections.
- The state of aircraft inside the sector: the percentage of climb/descent, level flight/transverse aircraft for the entire regulated sector aviation.
- Demand for airspace, the necessity to assess the degree of air traffic saturation, and military operating requirements.
- The ATCOs’ job skills, including his or her work experience and capacity to cope with emergency situations.
- Hardware facilities, quality of voice communication equipment, navigation stations, and surveillance equipment.
- Sector airports and runway conditions: the airport’s runway direction determines the approach and departure direction and the establishment of the approach five-sided method.
- Control techniques and concepts, coordination between control units, and altitude direction scheduling necessary for aircraft passing the sector.
References
- Rescher, N. Complexity: A Philosophical Overview; Transaction Publishers: New Jersey, NJ, USA, 1998; ISBN 978-1-4128-2008-0. [Google Scholar]
- Stacey, R.D. The Science of Complexity: An Alternative Perspective for Strategic Change Processes. Strateg. Manag. J. 1995, 16, 477–495. [Google Scholar] [CrossRef]
- Lissack, M.R. Complexity: The Science, Its Vocabulary, and Its Relation to Organizations. Emergence 1999, 1, 110–126. [Google Scholar] [CrossRef]
- Mogford, R.; Guttman, J.; Morrow, S.; Kopardekar, P. The Complexity Construct in Air Traffic Control A Review and Synthesis of the Literature; (DOTFAA-CT TN9522); Atl. City NJ FAA; Federal Aviation Administration: Washington, DC, USA, 1995.
- Meckiff, C.; Chone, R.; Nicolaon, J.-P. The Tactical Load Smoother for Multi-Sector Planning. In Proceedings of the 2nd USA/Europe Air Traffic Management R&D Seminar, Orlando, FL, USA, 1–4 December 1998. [Google Scholar]
- Chatterji, G.; Sridhar, B. Measures for Air Traffic Controller Workload Prediction. In Proceedings of the 1st AIAA, Aircraft, Technology Integration, and Operations Forum, Los Angeles, CA, USA, 16 October 2001; American Institute of Aeronautics and Astronautics. [Google Scholar]
- Radišić, T.; Novak, D.; Juričić, B. Reduction of Air Traffic Complexity Using Trajectory-Based Operations and Validation of Novel Complexity Indicators. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3038–3048. [Google Scholar] [CrossRef]
- Bloem, M.; Gupta, P. Configuring Airspace Sectors with Approximate Dynamic Programming. In Proceedings of the International Congress of the Aeronautical Sciences, Nice, France, 19–24 September 2010. [Google Scholar]
- Moon, W.-C.; Yoo, K.-E.; Choi, Y.-C. Air Traffic Volume and Air Traffic Control Human Errors. J. Transp. Technol. 2011, 1, 47. [Google Scholar] [CrossRef]
- Abdul Rahman, S.M.; Mulder, M.; van Paassen, R. Using the Solution Space Diagram in Measuring the Effect of Sector Complexity during Merging Scenarios. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011; p. 6693. [Google Scholar]
- Song, Z.; Chen, Y.; Li, Z.; Zhang, D.; Bi, H. A Review for Workload Measurement of Air Traffic Controller Based on Air Traffic Complexity. In Proceedings of the 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; IEEE: Piscataway Township, NJ, USA; pp. 2107–2112. [Google Scholar]
- Loft, S.; Pearcy, B.; Remington, R.W. Varying the Complexity of the Prospective Memory Decision Process in an Air Traffic Control Simulation. Z. Psychol. 2015, 219, 77–84. [Google Scholar] [CrossRef]
- Alexandrov, N. Control of Future Air Traffic Systems via Complexity Bound Management. In Proceedings of the 2013 Aviation Technology, Integration, and Operations Conference, Los Angeles, CA, USA, 12–14 August 2013; p. 4419. [Google Scholar]
- Corver, S.C.; Unger, D.; Grote, G. Predicting Air Traffic Controller Workload: Trajectory Uncertainty as the Moderator of the Indirect Effect of Traffic Density on Controller Workload through Traffic Conflict. Hum. Factors 2016, 58, 560–573. [Google Scholar] [CrossRef]
- Tang, J.; Alam, S.; Lokan, C.; Abbass, H.A. A Multi-Objective Approach for Dynamic Airspace Sectorization Using Agent Based and Geometric Models. Transp. Res. Part C Emerg. Technol. 2012, 21, 89–121. [Google Scholar] [CrossRef]
- Kontogiannis, T.; Malakis, S. Strategies in Coping with Complexity: Development of a Behavioural Marker System for Air Traffic Controllers. Saf. Sci. 2013, 57, 27–34. [Google Scholar] [CrossRef]
- Hong, Y.; Kim, Y.; Lee, K. Application of Complexity Assessment for Conflict Resolution in Air Tra [|# 14#|] Ffic Management Systems. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4625. [Google Scholar]
- Schmidt, D.K. On Modeling ATC Work Load and Sector Capacity. J. Aircr. 1976, 13, 531–537. [Google Scholar] [CrossRef]
- Next Generation Air Transportation System (NextGen)|Federal Aviation Administration. Available online: https://www.faa.gov/nextgen (accessed on 14 March 2023).
- Single European Sky. Available online: https://transport.ec.europa.eu/transport-modes/air/single-european-sky_en (accessed on 14 March 2023).
- Edwards, T.; Homola, J.; Mercer, J.; Claudatos, L. Multifactor Interactions and the Air Traffic Controller: The Interaction of Situation Awareness and Workload in Association with Automation. Cogn. Technol. Work 2017, 19, 687–698. [Google Scholar] [CrossRef] [Green Version]
- Triyanti, V.; Azis, H.A.; Iridiastadi, H.; Yassierli. Workload and Fatigue Assessment on Air Traffic Controller. IOP Conf. Ser. Mater. Sci. Eng. 2020, 847, 012087. [Google Scholar] [CrossRef]
- Delahaye, D.; Paimblanc, P.; Puechmorel, S.; Histon, J.M.; Hansman, R.J. A New Air Traffic Complexity Metric Based on Dynamical System Modelization. In Proceedings of the 21st Digital Avionics Systems Conference, Irvine, CA, USA, 27–31 October 2002; Volume 1, p. 4A2. [Google Scholar]
- Delahaye, D.; Puechmorel, S.; Hansman, J.; Histon, J. Air Traffic Complexity Map Based on Non Linear Dynamical Systems. Air Traffic Control Q. 2004, 12, 367–388. [Google Scholar] [CrossRef]
- Puechmorel, S.; Delahaye, D. New Trends in Air Traffic Complexity. In Proceedings of the EIWAC 2009, ENRI International Workshop on ATM/CNS, Tokyo, Japan, 5–6 March 2009; p. 55. [Google Scholar]
- Delahaye, D.; Puechmorel, S. 4D Trajectories Complexity Metric Based on Lyapunov Exponents. In Proceedings of the ECCS 2011, European Conference on Complex Systems, Vienne, Austria, 12 September 2011. [Google Scholar]
- Lee, K.; Feron, E.; Pritchett, A. Air Traffic Complexity: An Input-Output Approach. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 474–479. [Google Scholar]
- Lee, K.; Feron, E.; Pritchett, A. Describing Airspace Complexity: Airspace Response to Disturbances. J. Guid. Control Dyn. 2009, 32, 210–222. [Google Scholar] [CrossRef]
- Hong, Y.; Kim, Y.; Lee, K. Conflict Management in Air Traffic Control Using Complexity Map. J. Aircr. 2015, 52, 1524–1534. [Google Scholar] [CrossRef]
- Prandini, M.; Putta, V.; Hu, J. A Probabilistic Measure of Air Traffic Complexity in 3-D Airspace. Int. J. Adapt. Control Signal Process. 2010, 24, 813–829. [Google Scholar] [CrossRef]
- Prandini, M.; Putta, V.; Hu, J. Air Traffic Complexity in Future Air Traffic Management Systems. J. Aerosp. Oper. 2012, 1, 281–299. [Google Scholar] [CrossRef]
- Laudeman, I.V.; Shelden, S.G.; Branstrom, R.; Brasil, C. Dynamic Density: An Air Traffic Management Metric; NASA: Washington, DC, USA, 1998.
- Gianazza, D. Forecasting Workload and Airspace Configuration with Neural Networks and Tree Search Methods. Artif. Intell. 2010, 174, 530–549. [Google Scholar] [CrossRef] [Green Version]
- Xiao, M.; Zhang, J.; Cai, K.; Cao, X. ATCEM: A Synthetic Model for Evaluating Air Traffic Complexity: ATCEM: A Synthetic Model for Evaluating Air Traffic Complexity. J. Adv. Transp. 2016, 50, 315–325. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Cai, K.; Cao, X. A Semi-Supervised Learning Method for Air Traffic Complexity Evaluation. In Proceedings of the 2017 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VI, USA, 18–20 April 2017; pp. 1A3-1–1A3-11. [Google Scholar]
- Cao, X.; Zhu, X.; Tian, Z.; Chen, J.; Wu, D.; Du, W. A Knowledge-Transfer-Based Learning Framework for Airspace Operation Complexity Evaluation. Transp. Res. Part C Emerg. Technol. 2018, 95, 61–81. [Google Scholar] [CrossRef]
- Li, B.; Du, W.; Zhang, Y.; Chen, J.; Tang, K.; Cao, X. A Deep Unsupervised Learning Approach for Airspace Complexity Evaluation. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11739–11751. [Google Scholar] [CrossRef]
- Xie, H.; Zhang, M.; Ge, J.; Dong, X.; Chen, H. Learning Air Traffic as Images: A Deep Convolutional Neural Network for Airspace Operation Complexity Evaluation. Complexity 2021, 2021, 6457246. [Google Scholar] [CrossRef]
- Tan, X.; Sun, Y.; Zeng, W.; Quan, Z. Congestion Recognition of the Air Traffic Control Sector Based on Deep Active Learning. Aerospace 2022, 9, 302. [Google Scholar] [CrossRef]
- Song, L.; Wanke, C.; Greenbaum, D. Predicting Sector Capacity for Tfm Decision Support. In Proceedings of the 6th AIAA Aviation Technology, Integration and Operations Conference (ATIO), Wichita, KS, USA, 25–27 September 2006; p. 7827. [Google Scholar]
- Gianazza, D. Airspace Configuration Using Air Traffic Complexity Metrics. In Proceedings of the ATM 2007, 7th USA/Europe Air Traffic Management Research and Developpment Seminar, Barcelona, Spain, 2 July 2007. [Google Scholar]
- Gianazza, D.; Guittet, K. Selection and Evaluation of Air Traffic Complexity Metrics. In Proceedings of the 2006 IEEE/AIAA 25TH Digital Avionics Systems Conference, Portland, OR, USA, 15–19 October 2006; pp. 1–12. [Google Scholar]
- Cook, A.; Blom, H.A.; Lillo, F.; Mantegna, R.N.; Micciche, S.; Rivas, D.; Vázquez, R.; Zanin, M. Applying Complexity Science to Air Traffic Management. J. Air Transp. Manag. 2015, 42, 149–158. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Song, Z.; Wen, R.; Zhao, Y. Study on Evolution Characteristics of Air Traffic Situation Complexity Based on Complex Network Theory. Aerosp. Sci. Technol. 2016, 58, 518–528. [Google Scholar] [CrossRef]
- Yang, L.; Yin, S.; Hu, M.; Han, K.; Zhang, H. Empirical Exploration of Air Traffic and Human Dynamics in Terminal Airspaces. Transp. Res. Part C Emerg. Technol. 2017, 84, 219–244. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Cao, X.; Cai, K. Measuring Air Traffic Complexity Based on Small Samples. Chin. J. Aeronaut. 2017, 30, 1493–1505. [Google Scholar] [CrossRef]
- Kipf, T.N.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. arXiv 2016, arXiv:1609.02907. [Google Scholar]
- Tang, J.; Wang, Y.; Liu, F. Characterizing Traffic Time Series Based on Complex Network Theory. Phys. A Stat. Mech. Appl. 2013, 392, 4192–4201. [Google Scholar] [CrossRef]
- Tang, J.; Wang, Y.; Wang, H.; Zhang, S.; Liu, F. Dynamic Analysis of Traffic Time Series at Different Temporal Scales: A Complex Networks Approach. Phys. A Stat. Mech. Appl. 2014, 405, 303–315. [Google Scholar] [CrossRef]
- Wen, X.; Tu, C.; Wu, M. Node Importance Evaluation in Aviation Network Based on “No Return” Node Deletion Method. Phys. A Stat. Mech. Appl. 2018, 503, 546–559. [Google Scholar] [CrossRef]
- Wen, X.; Tu, C.; Wu, M.; Jiang, X. Fast Ranking Nodes Importance in Complex Networks Based on LS-SVM Method. Phys. A Stat. Mech. Appl. 2018, 506, 11–23. [Google Scholar] [CrossRef]
- Jiang, X.; Wen, X.; Wu, M.; Song, M.; Tu, C. A Complex Network Analysis Approach for Identifying Air Traffic Congestion Based on Independent Component Analysis. Phys. A Stat. Mech. Appl. 2019, 523, 364–381. [Google Scholar] [CrossRef]
- Gianazza, D.; Guittet, K. Évaluation of Air Traffic Complexity Metrics Using Neural Networks and Sector Status. In Proceedings of the 2nd International Conference on Research in Air Transportation, Belgrade, Serbia, 24 June 2006. [Google Scholar]
- Lin, Y. Spoken Instruction Understanding in Air Traffic Control: Challenge, Technique, and Application. Aerospace 2021, 8, 65. [Google Scholar] [CrossRef]
- Lin, Y.; Yang, B.; Li, L.; Guo, D.; Zhang, J.; Chen, H.; Zhang, Y. ATCSpeechNet: A Multilingual End-to-End Speech Recognition Framework for Air Traffic Control Systems. Appl. Soft Comput. 2021, 112, 107847. [Google Scholar] [CrossRef]
- Fan, P.; Guo, D.; Lin, Y.; Yang, B.; Zhang, J. Speech Recognition for Air Traffic Control via Feature Learning and End-to-End Training. arXiv 2021, arXiv:2111.02654. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, P.; Guo, D.; Zhou, Y.; Wu, Y.; Yang, B.; Lin, Y. Automatic Repetition Instruction Generation for Air Traffic Control Training Using Multi-Task Learning with an Improved Copy Network. Knowl. Based Syst. 2022, 241, 108232. [Google Scholar] [CrossRef]
- Lin, Y.; Ruan, M.; Cai, K.; Li, D.; Zeng, Z.; Li, F.; Yang, B. Identifying and Managing Risks of AI-Driven Operations: A Case Study of Automatic Speech Recognition for Improving Air Traffic Safety. Chin. J. Aeronaut. 2022, in press. [Google Scholar] [CrossRef]
- Isufaj, R.; Koca, T.; Piera, M.A. Spatiotemporal Graph Indicators for Air Traffic Complexity Analysis. Aerospace 2021, 8, 364. [Google Scholar] [CrossRef]
- Martins, A.F.T.; Astudillo, R.F. From Softmax to Sparsemax: A Sparse Model of Attention and Multi-Label Classification. arXiv 2016, arXiv:1602.02068. [Google Scholar]
- Yan, Z.; Yang, H.; Li, F.; Lin, Y. A Deep Learning Approach for Short-Term Airport Traffic Flow Prediction. Aerospace 2022, 9, 11. [Google Scholar] [CrossRef]
- Grandini, M.; Bagli, E.; Visani, G. Metrics for Multi-Class Classification: An Overview. arXiv 2020, arXiv:2008.05756. [Google Scholar]
- An, J.; Guo, L.; Liu, W.; Fu, Z.; Ren, P.; Liu, X.; Li, T. IGAGCN: Information Geometry and Attention-Based Spatiotemporal Graph Convolutional Networks for Traffic Flow Prediction. Neural Netw. 2021, 143, 355–367. [Google Scholar] [CrossRef] [PubMed]
- Hamilton, W.; Ying, R.; Leskovec, J. Inductive Representation Learning on Large Graphs. arXiv 2017, arXiv:1706.02216. [Google Scholar]
- Xu, K.; Hu, W.; Leskovec, J.; Jegelka, S. How Powerful Are Graph Neural Networks? arXiv 2019, arXiv:1810.00826. [Google Scholar]
- Ying, R.; You, J.; Morris, C.; Ren, X.; Hamilton, W.L.; Leskovec, J. Hierarchical Graph Representation Learning with Differentiable Pooling. In Proceedings of the 32nd International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 3 December 2018; Curran Associates Inc.: Red Hook, NY, USA; pp. 4805–4815. [Google Scholar]
- Ranjan, E.; Sanyal, S.; Talukdar, P. ASAP: Adaptive Structure Aware Pooling for Learning Hierarchical Graph Representations. Proc. AAAI Conf. Artif. Intell. 2020, 34, 5470–5477. [Google Scholar] [CrossRef]
- Bianchi, F.M.; Grattarola, D.; Alippi, C. Spectral Clustering with Graph Neural Networks for Graph Pooling. In Proceedings of the 37th International Conference on Machine Learning, Virtual Event, 13 July 2020; pp. 874–883. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Subcategory | Researcher | Evaluation Perspective | Evaluation Method | Result Presentation |
|---|---|---|---|---|---|
| Statistical Method | Single Viewpoint | Delahaye et al. [23,24]. | Aircraft pair relative position | Geometric air traffic disorder metric | Geometrically complex coordinate system |
| Delahaye et al. [25,26]. | Lyapunov’s exponent-based trajectory disorder metric | Measure trajectory’s convergence and divergence | Lyapunov index magnitude | ||
| Lee et al. [27,28,29]. | Conflict resolution difficulty | Quantifying complexity as the required least control behavior | Complexity graph | ||
| Prandini et al. [30,31]. | Conflict risk assessment in sector regions | Conflict probability calculated from flight intention and status | Conflict possibility determines complexity | ||
| Multi- viewpoint | Laudeman et al. [32]. | Eight traffic parameters for Dynamic Density (DD) conceptualization | Linear regression methodology | Value of dynamic density | |
| Machine learning method | Typical Indicator | Gianazza et al. [33]. | Establish 28-indicators set and pick 6 factors | Backpropagation neural network (BPNN) model | Three-sector complexity level (CL) (low/normal/high) |
| Xiao et al. [34]. | Select 7 factors from 28-indicators set | BP-AdaBoost model | |||
| Zhu et al. [35]. | Utilize factor subset created by Xiao et al. [34]. | Semi-supervised learning | |||
| Cao et al. [36]. | Twenty-eight-indicators set | Knowledge transfer methodology | |||
| Li et al. [37]. | Twenty-eight-indicators set | Deep unsupervised learning | |||
| Feature Pattern Transformation | Xie et al. [38]. | Design multichannel ATS image to replace feature set | Convolutional Neural Network (CNN) based model | Five-sector CL | |
| Tan et al. [39]. | Seven graphical indicators computed from aircraft network diagram | Deep sparse autoencoder neural network model | Three-sector congestion level |
| CL | ATC Difficulty | ATS Description |
|---|---|---|
| 1 | No need for intervention with flight. Ample spare capacity. Low workload. | Smooth air traffic. Sufficient flight interval. Orderly aircraft flight. Safe and efficient air traffic |
| 2 | Well-progressing ATC. All tasks under control. Normal workload. | Increased number of aircraft. No traffic congestion. Quickly fixed aircraft disturbance. Normal sector operation. |
| 3 | Increased ATCOI. Unable maintaining this level for very long. Saturated workload. | Minor sector congestion. Several affected aircrafts. With ATCO stepping a lot to keep sector working normally. Inefficient air transportation |
| 4 | Unfinished ATC tasks. No spare capacity. Excessive workload. | Widespread air traffic congestion. Increased chance of inter-aircraft conflict. Frequent flight delays. Overloaded airspace utilization. |
| ATCOI Type | ATCOI Content |
|---|---|
| Common ATC term | Maintain own separation and Visual Meteorological Condition (VMC) to (level) |
| Airport ATC term | Right (or left) turn approved |
| Approach ATC term | Expected approach time (time) |
| En-route ATC term | Maintain (level) while in controlled airspace |
| Coordination term between air traffic service units | (aircraft call sign) Not released until (time or significant point) |
| Radar term | Radar contact [position] |
| Automatic Dependent Surveillance (ADS) term | ADS |
| Term between ground crew and flight crew | Commencing pushback |
| Reduced Vertical Separation Minima (RVSM) term | Unable RVSM due [Turbulence] |
| Alert Term | (aircraft call sign) Terrain alert (suggested pilot action, if possible) |
| Time | Aircraft ID | Longitude | Latitude | Altitude | Velocity | Vertical Speed | Heading |
|---|---|---|---|---|---|---|---|
| 5 August 2019 17:00 | 29 | 113.6798 | 32.26496 | 1637.03 | 146.7624 | −7.74869 | 29.6181 |
| 5 August 2019 17:00 | 48 | 113.9564 | 32.90135 | 2242.82 | 132.898 | 15.11808 | 259.079 |
| 5 August 2019 17:00 | 28 | 113.7354 | 32.16427 | 1642.11 | 147.0003 | −6.12309 | 30.18083 |
| 5 August 2019 17:00 | 35 | 113.9616 | 32.7625 | 1201.42 | 106.1407 | −0.10837 | 253.1773 |
| 5 August 2019 17:00 | 24 | 113.7724 | 32.55542 | 1733.55 | 150.3578 | 12.46293 | 107.202 |
| 5 August 2019 17:00 | 73 | 113.0011 | 32.95717 | 922.02 | 77.30538 | 0 | 273.4336 |
| 5 August 2019 17:00 | 8 | 113.5725 | 32.37559 | 1230.63 | 125.3677 | −4.60587 | 37.0789 |
| 5 August 2019 17:00 | 59 | 113.8693 | 32.38937 | 3025.14 | 151.4817 | −8.45312 | 144.2587 |
| 5 August 2019 17:00 | 39 | 113.6553 | 32.90128 | 1196.34 | 144.4896 | 0.054187 | 204.2079 |
| Category | Baseline | MAE | ACC (%) | Macro-F1-Score (%) | |||
|---|---|---|---|---|---|---|---|
| SA | SR | SA | SR | SA | SR | ||
| Handicraft feature | BPNN | 0.3788 | 0.3687 | 64.98 | 65.99 | 66.10 | 66.98 |
| SVM | 0.3956 | 0.3519 | 61.78 | 65.15 | 62.33 | 64.74 | |
| Global pooling | GCN | 0.2391 | 0.2323 | 76.26 | 77.10 | 77.05 | 77.76 |
| GAT | 0.2727 | 0.2930 | 73.06 | 71.38 | 74.17 | 72.68 | |
| GraphSAGE | 0.2879 | 0.2524 | 71.55 | 74.92 | 72.48 | 75.87 | |
| GIN | 0.2795 | 0.2626 | 72.90 | 74.24 | 73.99 | 75.18 | |
| Hierarchical pooling | DiffPool | 0.1920 | 0.2104 | 80.98 | 81.48 | 82.56 | 80.84 |
| ASAP | 0.2525 | 0.1751 | 84.85 | 85.35 | 84.12 | 85.02 | |
| MinCutPool | 0.1723 | 0.2155 | 84.28 | 81.14 | 84.02 | 80.46 | |
| Proposed | HGRL-NCI | 0.1364 | 0.1476 | 88.05 | 87.26 | 88.07 | 87.16 |
| HGRL | 0.0960 | 0.1414 | 91.41 | 89.06 | 91.42 | 88.91 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Yang, H.; Wu, X. Air Traffic Complexity Evaluation with Hierarchical Graph Representation Learning. Aerospace 2023, 10, 352. https://doi.org/10.3390/aerospace10040352
Zhang L, Yang H, Wu X. Air Traffic Complexity Evaluation with Hierarchical Graph Representation Learning. Aerospace. 2023; 10(4):352. https://doi.org/10.3390/aerospace10040352
Chicago/Turabian StyleZhang, Lu, Hongyu Yang, and Xiping Wu. 2023. "Air Traffic Complexity Evaluation with Hierarchical Graph Representation Learning" Aerospace 10, no. 4: 352. https://doi.org/10.3390/aerospace10040352