
High-Accuracy Finite Element Model Updating a Framed Structure Based on Response Surface Method and Partition Modification

Abstract
:1. Introduction
2. FEMs and Modal Analysis of Experiment Rack Simulator
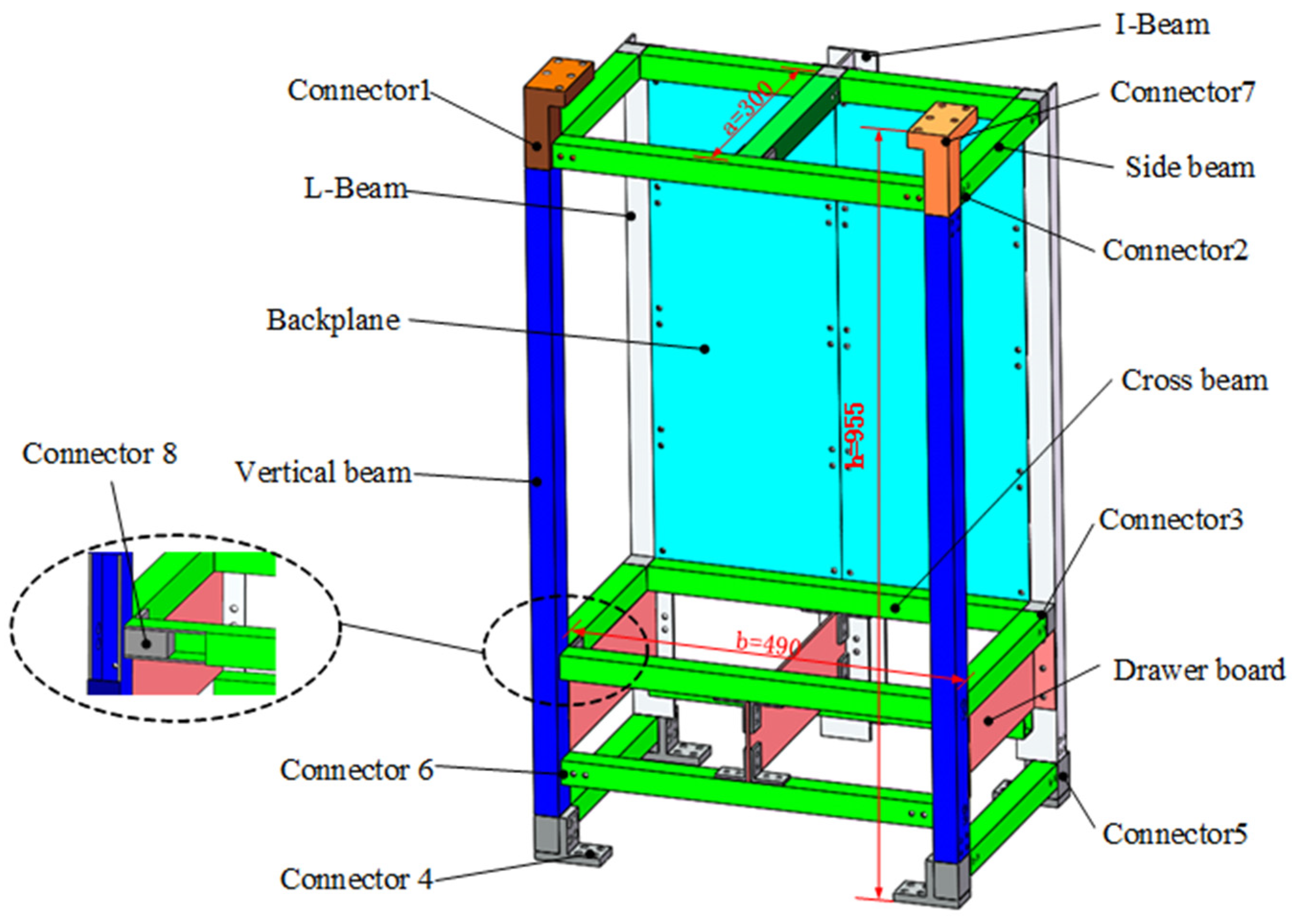
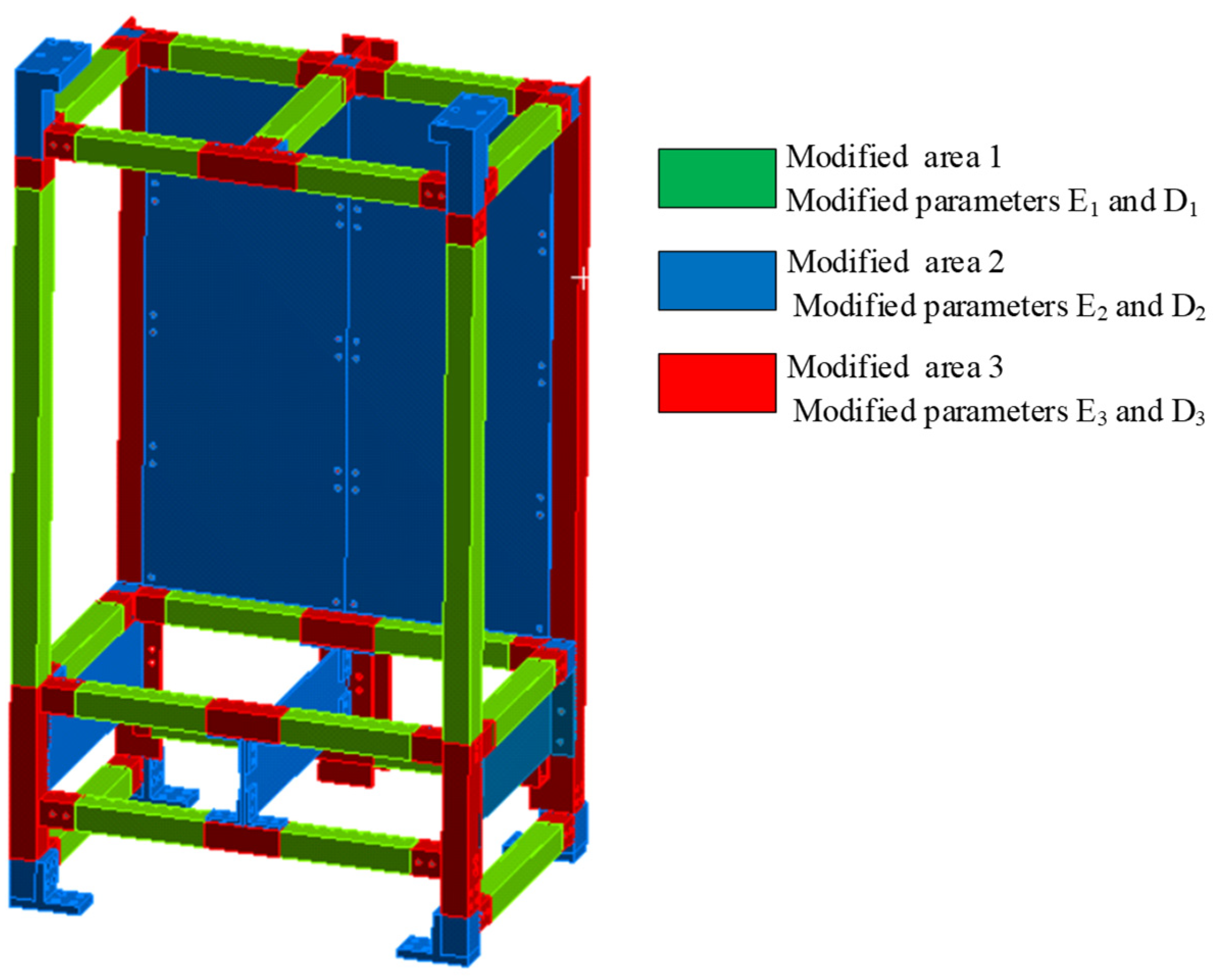
2.1. Structure Description
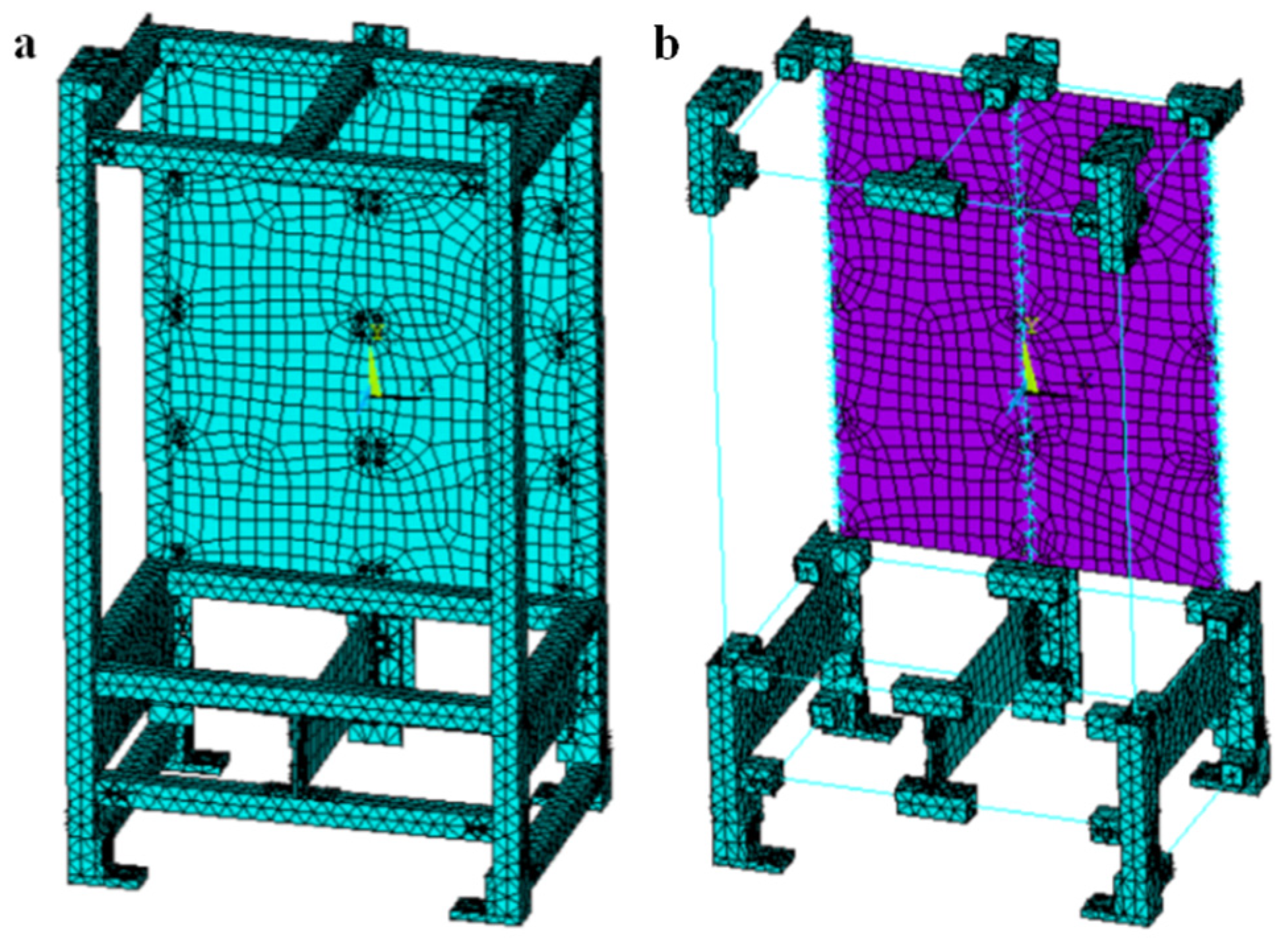
2.2. Two Types of FE Models
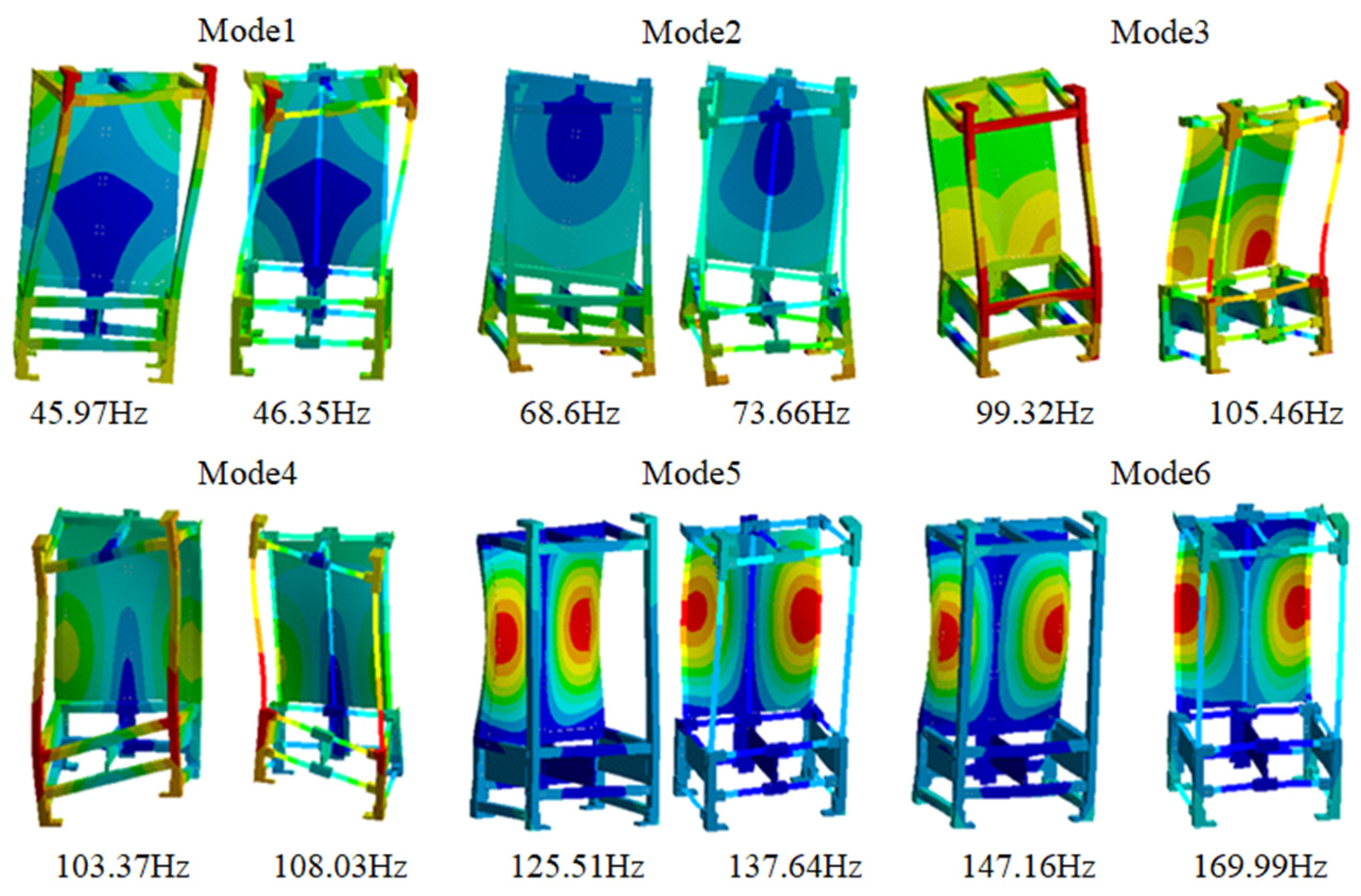
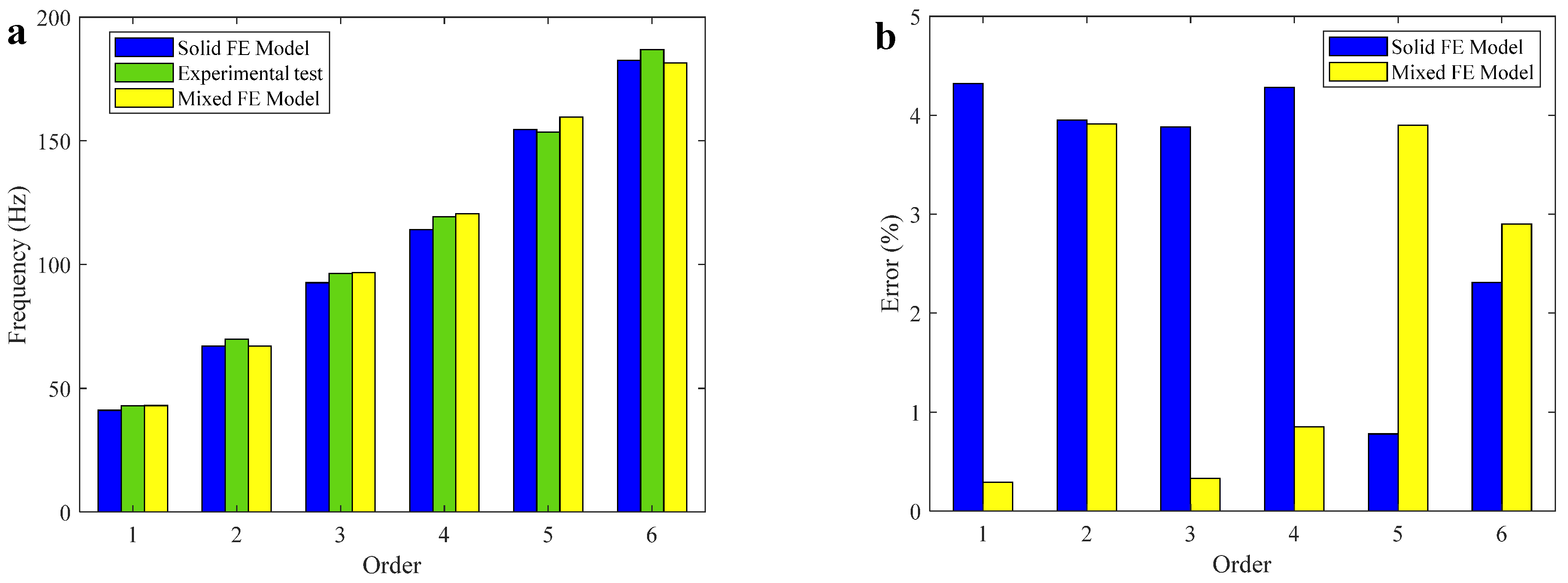
2.3. Calculated Modal Results
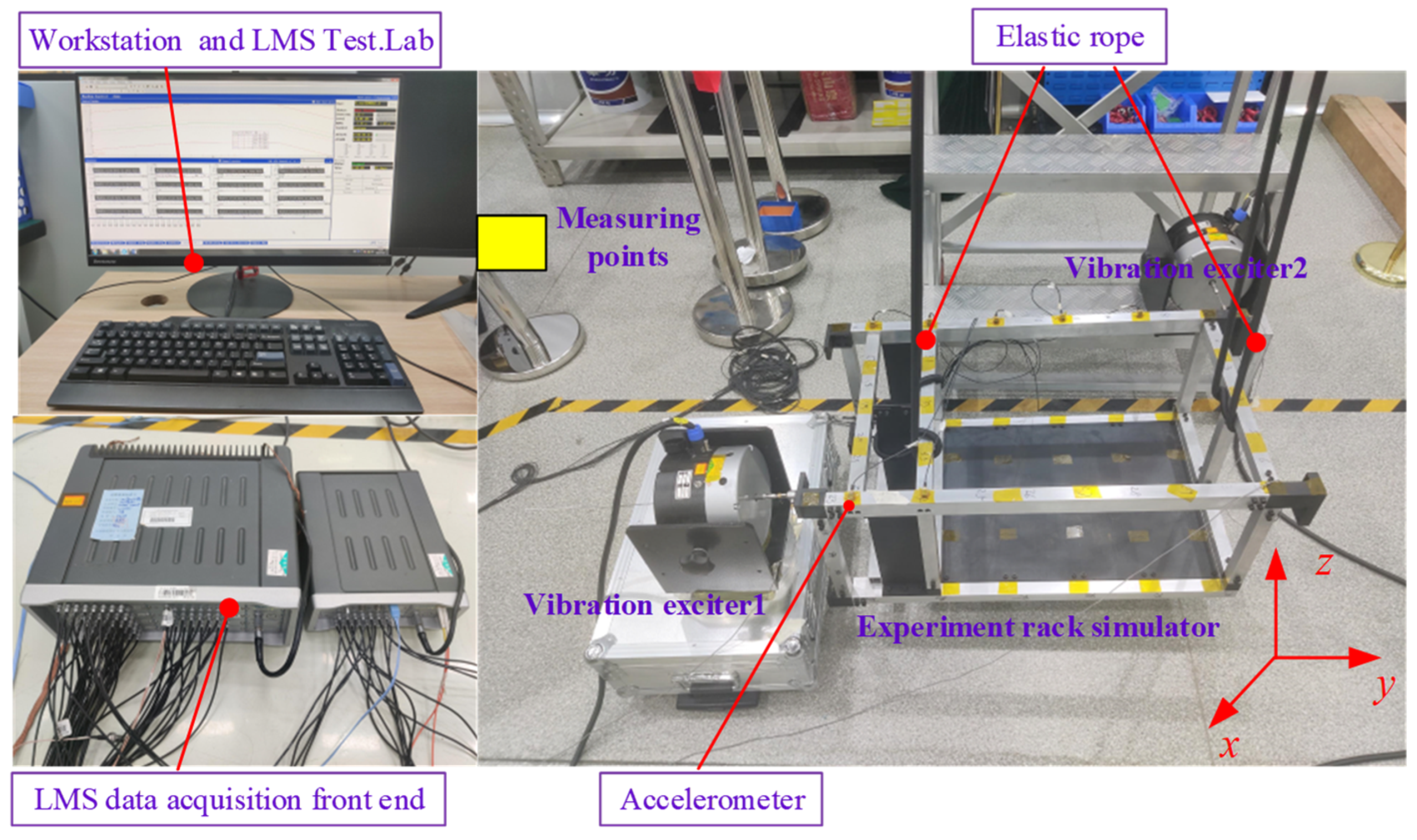
2.4. Measured Modal Results
2.5. Correlation Analysis
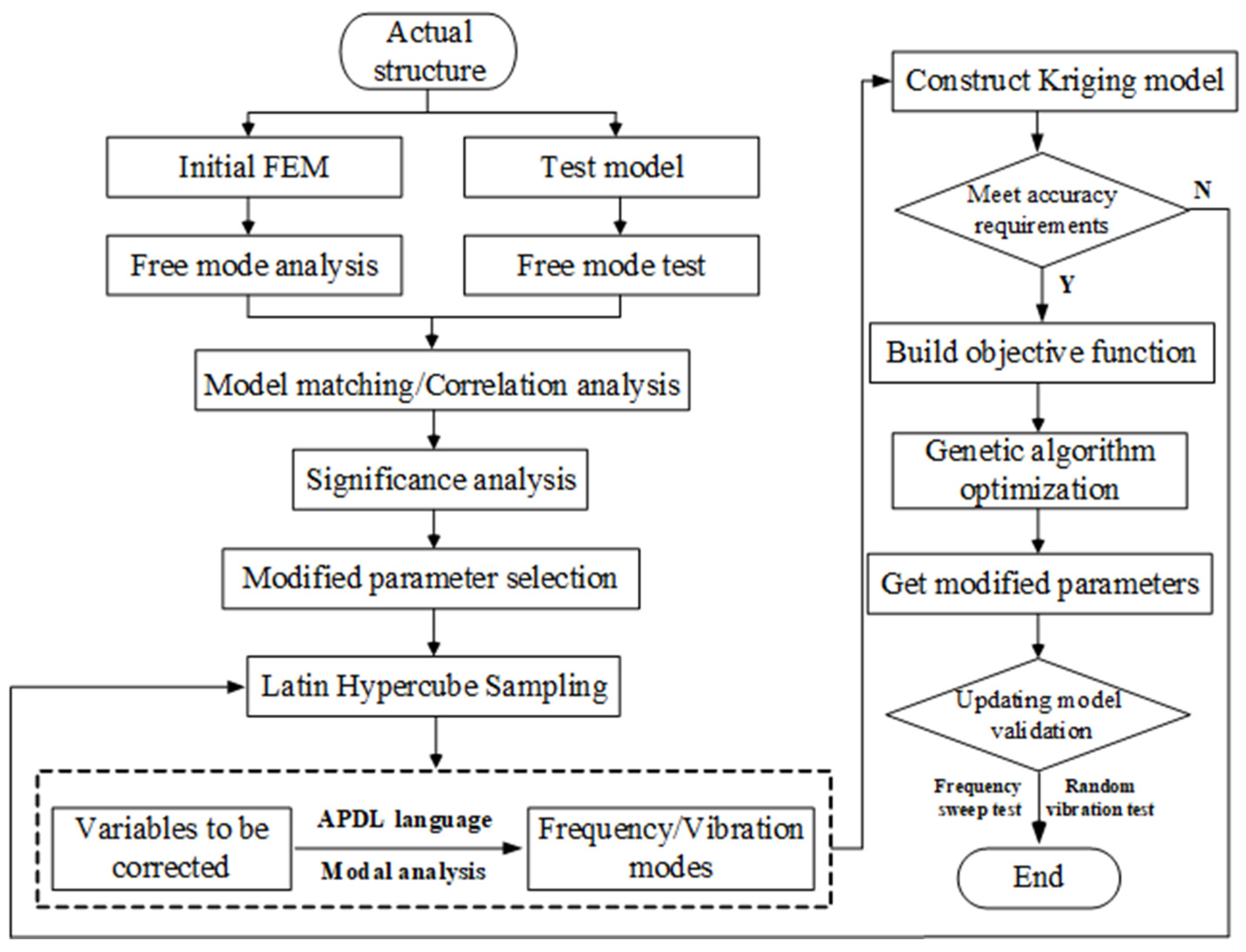
3. RSM and FEMU
3.1. Fundamental of RSM
3.2. Significance Analysis
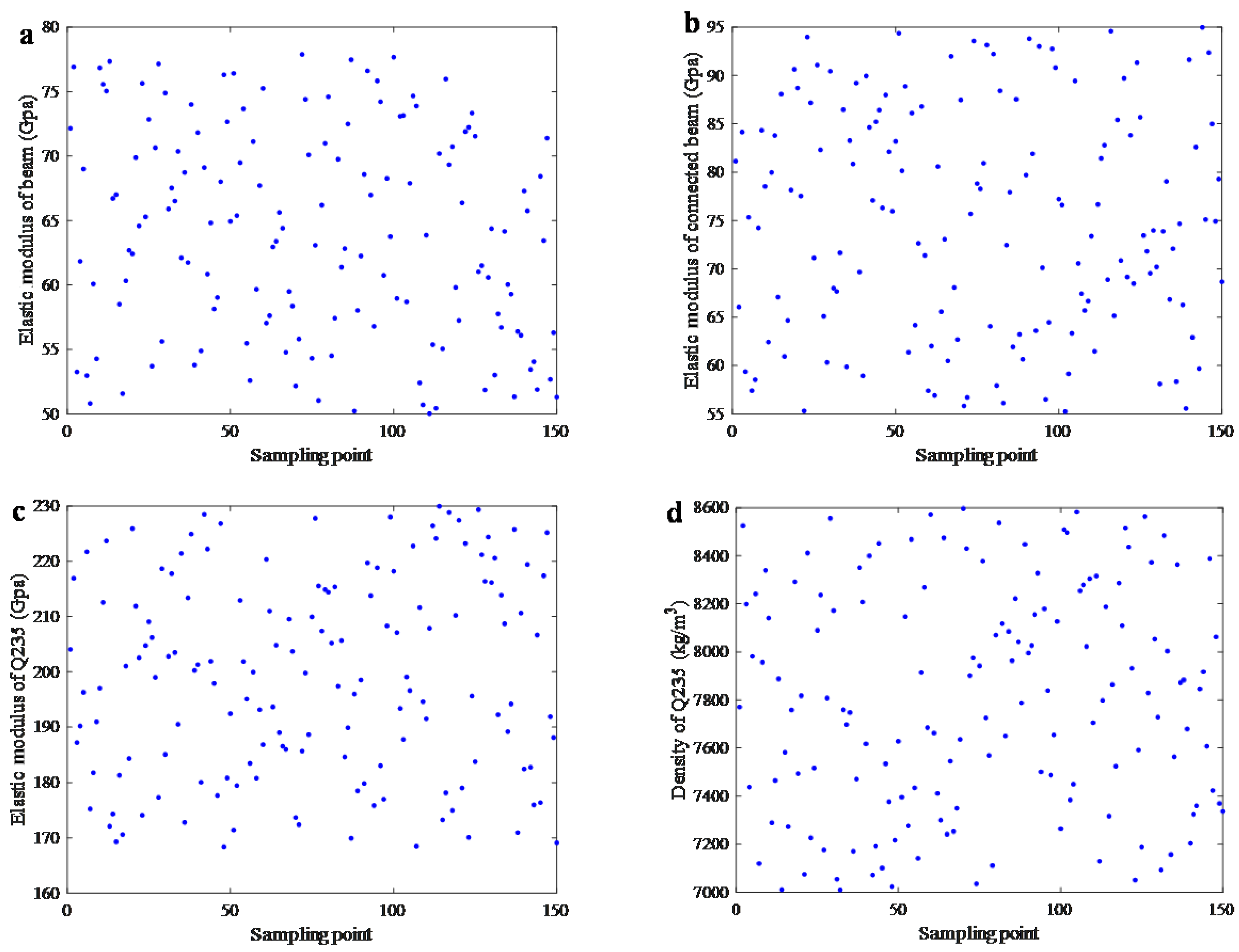
3.3. Establishment of RSM
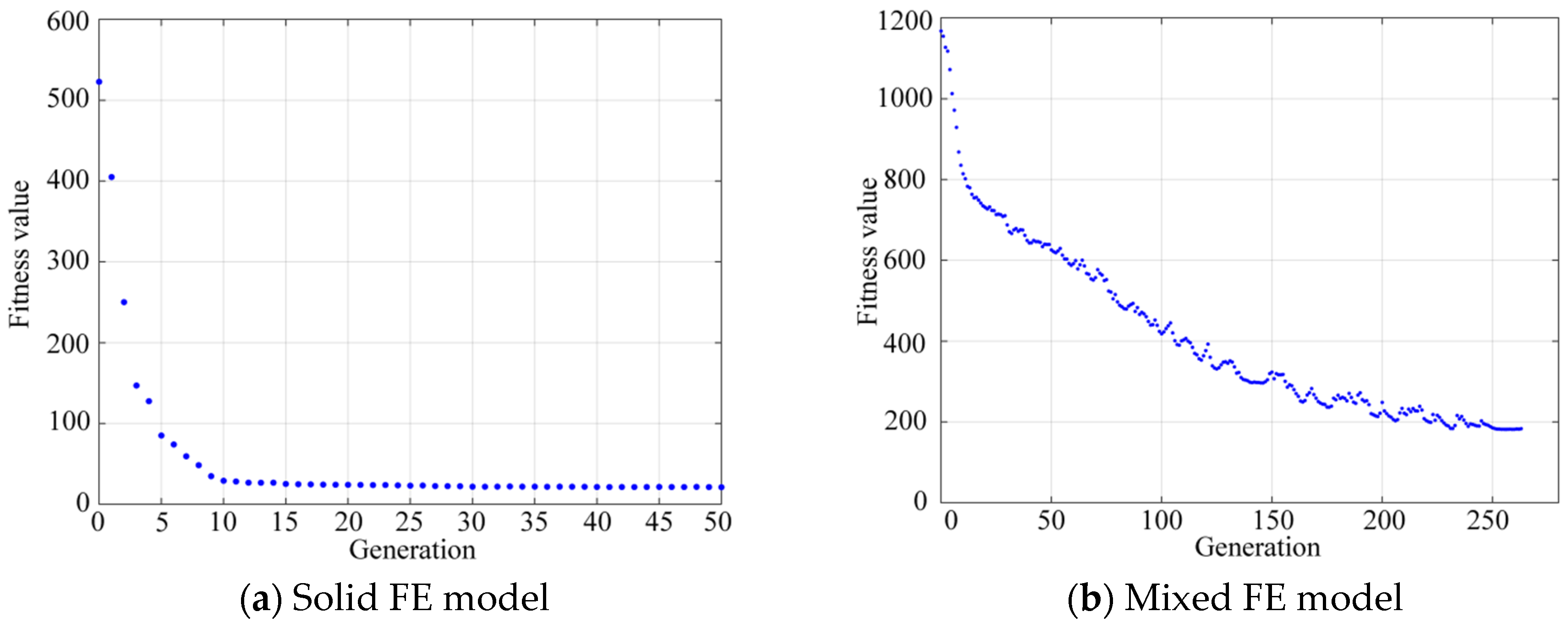
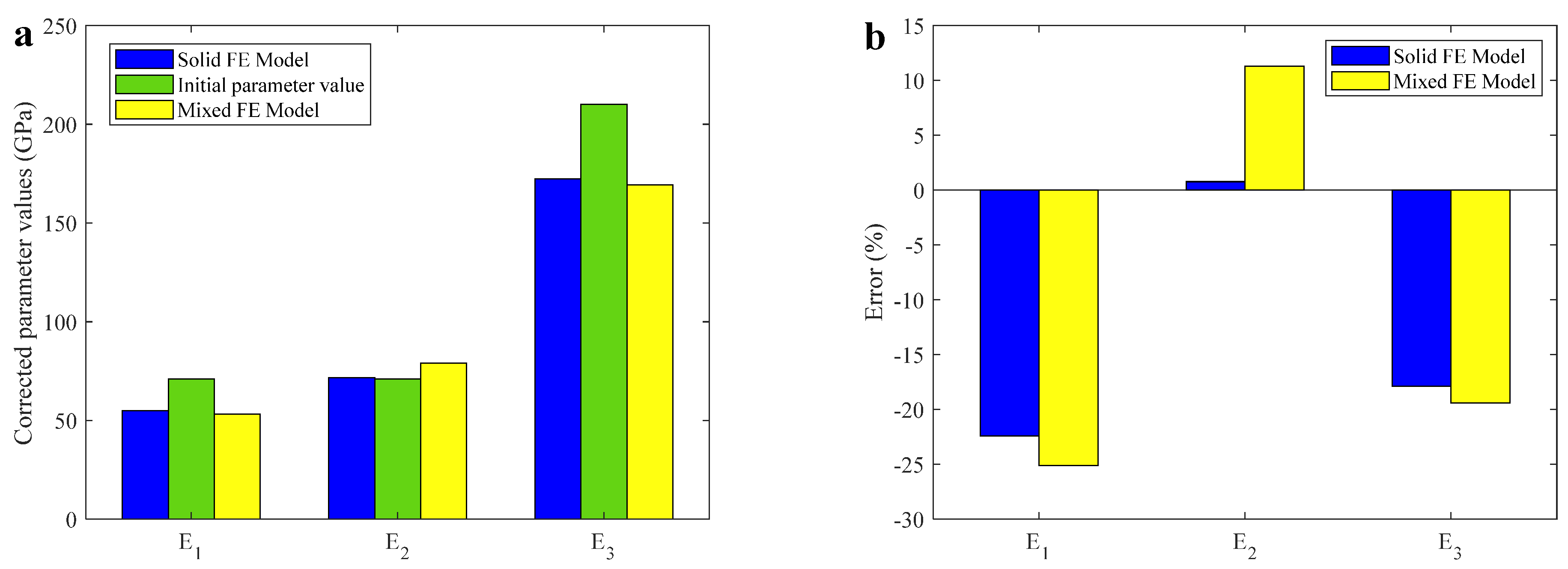
3.4. FEMU
4. Experimental Validation for FEMU
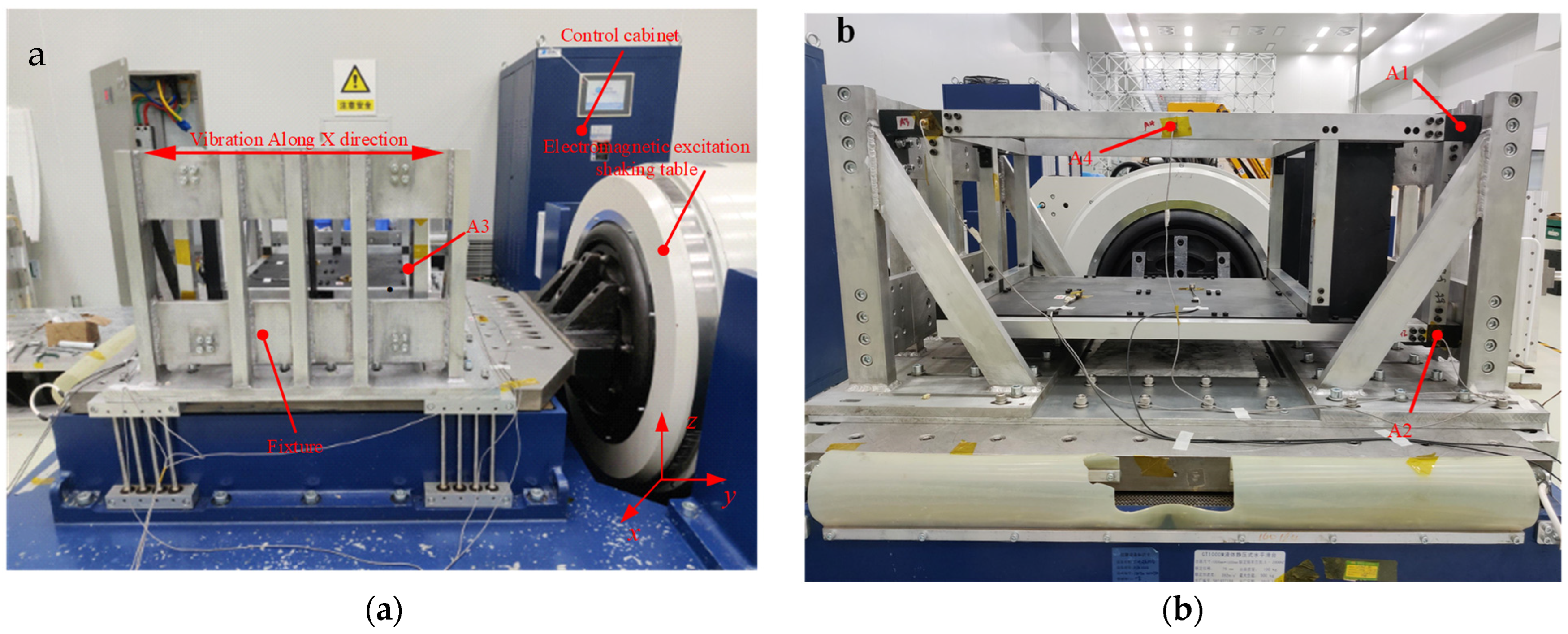
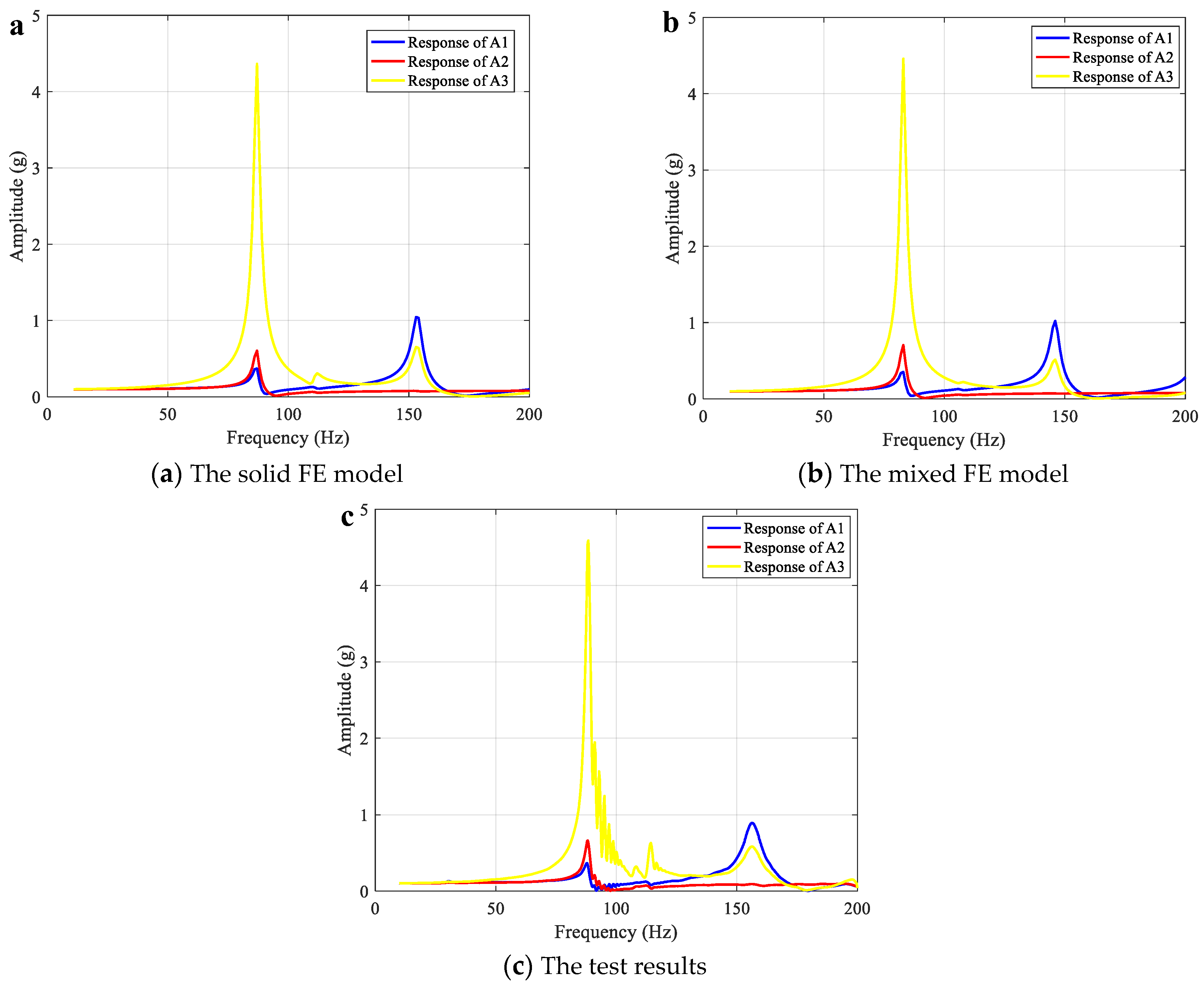
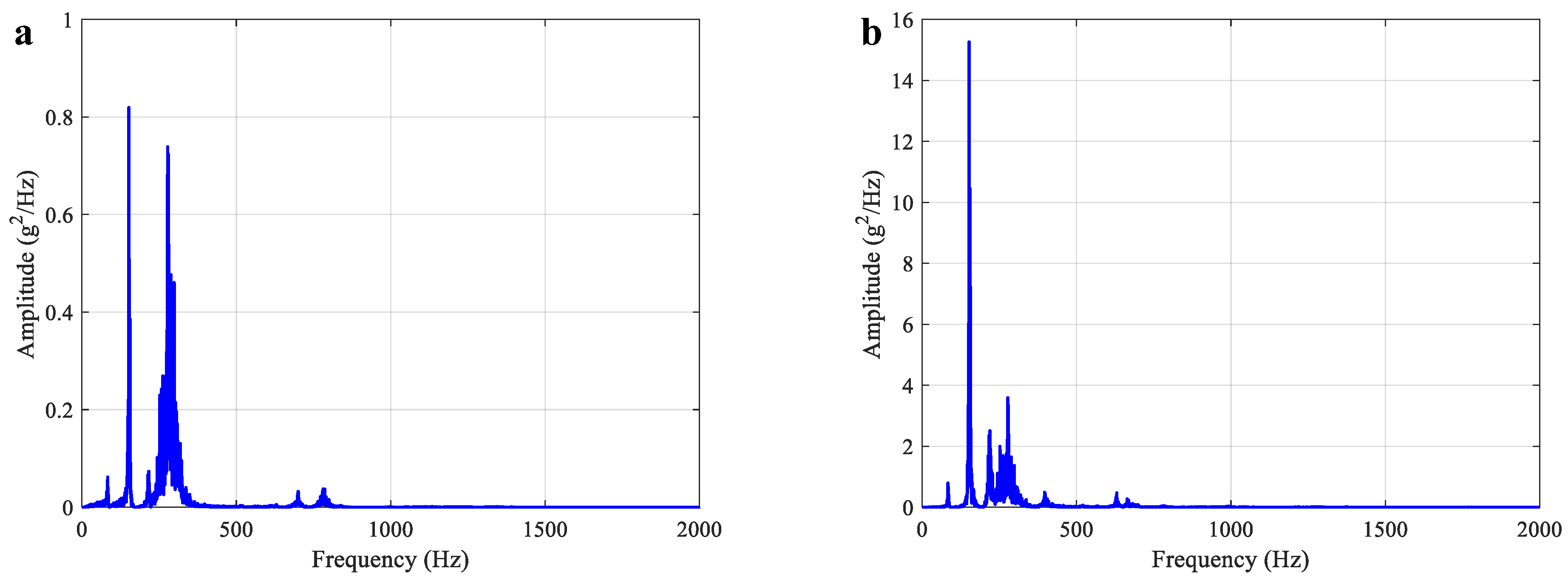
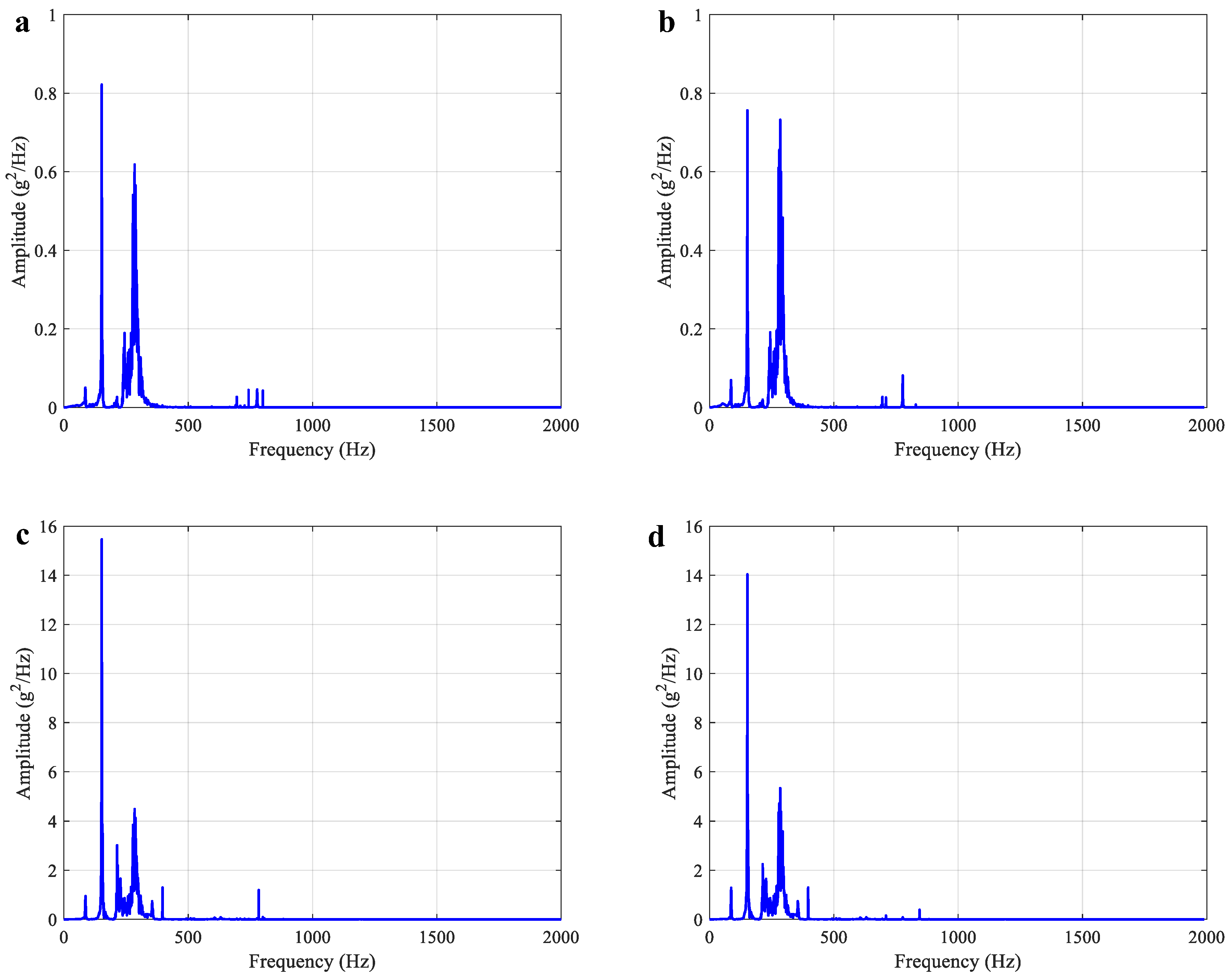
4.1. Sweep Frequency Test
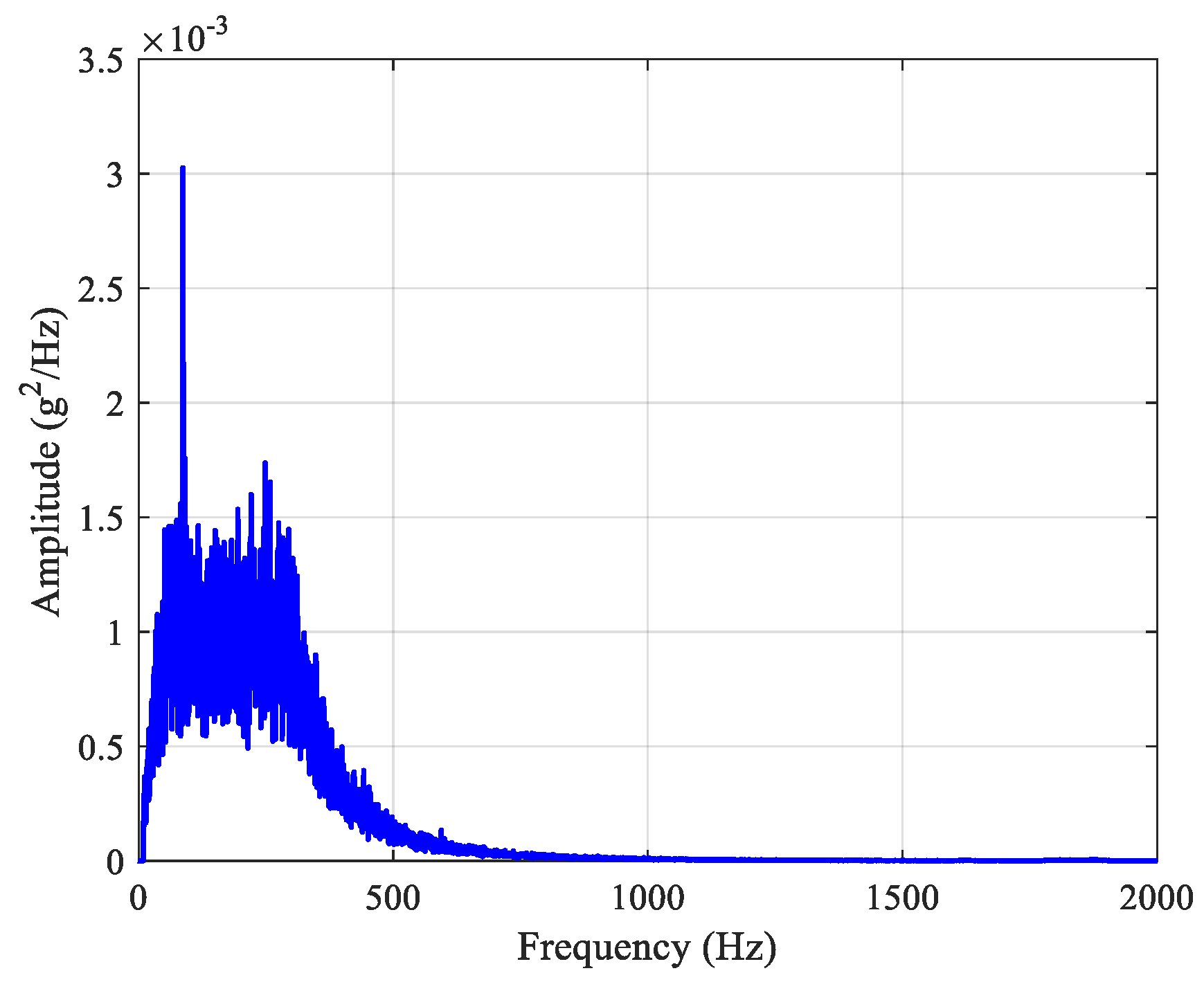
4.2. Random Vibration Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| ωFEA | The calculated frequency via FEM. |
| ωEMA | The test modal frequency. |
| fkrigi | The natural frequency of the i-th order calculated by the Kriging model. |
| φkrigi | The mode shape of the i-th order calculated by the Kriging model. |
| fri | The natural frequency of the i-th order obtained by the experiment. |
| φri | The mode shape of the i-th order obtained by the experiment. |
| P(X) | The polynomial base function. |
| β | The corresponding undetermined coefficient. |
| S(X) | The fitting deviation function with a mean of 0 and a variance of σ2. |
| R(u, v) | The correlation function. |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | |||||
| Parameter | X1 | X2 | …… | X149 | X150 |
| E1 (GPa) | 72.15 | 76.95 | …… | 56.29 | 51.30 |
| E2 (GPa) | 81.14 | 66.05 | …… | 79.29 | 68.65 |
| E3 (GPa) | 204.05 | 216.93 | …… | 188.10 | 169.11 |
| D1 (kg/m3) | 7769.58 | 8525.61 | …… | 7369.89 | 7336.70 |
| f1 (Hz) | 49.61 | 47.44 | …… | 46.93 | 44.69 |
| f2 (Hz) | 75.46 | 72.20 | …… | 72.03 | 68.63 |
| f3 (Hz) | 110.98 | 106.22 | …… | 105.04 | 99.90 |
| f4 (Hz) | 139.85 | 135.20 | …… | 133.18 | 126.68 |
| f5 (Hz) | 183.30 | 174.78 | …… | 174.63 | 165.80 |
| f6 (Hz) | 204.86 | 196.96 | …… | 200.84 | 190.96 |
| (b) | |||||
| Parameter | X1 | X2 | …… | X149 | X150 |
| E1 (GPa) | 72.15 | 76.92 | …… | 56.30 | 51.30 |
| E2 (GPa) | 81.15 | 66.06 | …… | 79.29 | 68.65 |
| E3 (GPa) | 204.05 | 216.94 | …… | 188.10 | 169.12 |
| D1 (kg/m3) | 7769.58 | 8525.61 | …… | 7369.89 | 7336.70 |
| f1 (Hz) | 45.48 | 42.51 | …… | 42.35 | 40.75 |
| f2 (Hz) | 70.46 | 67.07 | …… | 67.39 | 64.55 |
| f3 (Hz) | 102.28 | 96.35 | …… | 96.34 | 92.54 |
| f4 (Hz) | 123.10 | 118.67 | …… | 120.20 | 114.28 |
| f5 (Hz) | 169.50 | 160.61 | …… | 161.02 | 154.21 |
| f6 (Hz) | 192.58 | 190.04 | …… | 192.95 | 183.45 |
| (a) | |||||||||
| X1 | X2 | X3 | |||||||
| E1 (GPa) | 77.45 | 55.17 | 62.84 | ||||||
| E2 (GPa) | 72.71 | 90.77 | 56.63 | ||||||
| E3 (GPa) | 177.75 | 193.31 | 218.67 | ||||||
| D1 (kg/m3) | 8271.90 | 7009.00 | 7859.90 | ||||||
| FEM | RSM | Error | FEM | RSM | Error | FEM | RSM | Error | |
| f1 (X) | 48.00 | 47.80 | 0.42 | 48.39 | 48.21 | 0.38 | 45.65 | 45.68 | 0.06 |
| f2 (X) | 72.48 | 72.19 | 0.39 | 74.46 | 74.18 | 0.38 | 70.09 | 70.13 | 0.06 |
| f3 (X) | 107.21 | 106.78 | 0.41 | 108.33 | 107.95 | 0.36 | 102.06 | 102.13 | 0.06 |
| f4 (X) | 133.28 | 132.73 | 0.41 | 137.56 | 137.02 | 0.39 | 132.36 | 132.41 | 0.03 |
| f5 (X) | 175.23 | 174.52 | 0.41 | 180.92 | 180.19 | 0.40 | 169.26 | 169.37 | 0.06 |
| f6 (X) | 189.44 | 188.49 | 0.50 | 209.93 | 208.88 | 0.50 | 198.57 | 198.81 | 0.12 |
| (b) | |||||||||
| X1 | X2 | X3 | |||||||
| E1 (GPa) | 77.45 | 55.17 | 62.84 | ||||||
| E2 (GPa) | 72.71 | 90.77 | 56.63 | ||||||
| E3 (GPa) | 177.75 | 193.31 | 218.67 | ||||||
| D1 (kg/m3) | 8271.90 | 7009.00 | 7859.90 | ||||||
| FEM | RSM | Error | FEM | RSM | Error | FEM | RSM | Error | |
| f1 (X) | 42.13 | 42.21 | 0.18 | 47.81 | 47.77 | 0.09 | 41.41 | 41.46 | 0.12 |
| f2 (X) | 65.62 | 65.77 | 0.24 | 73.94 | 73.88 | 0.08 | 65.81 | 65.87 | 0.09 |
| f3 (X) | 94.64 | 94.85 | 0.23 | 107.47 | 107.38 | 0.09 | 94.22 | 94.31 | 0.10 |
| f4 (X) | 115.09 | 115.40 | 0.27 | 128.89 | 128.79 | 0.08 | 116.98 | 117.09 | 0.10 |
| f5 (X) | 157.37 | 157.74 | 0.23 | 177.86 | 177.71 | 0.09 | 157.17 | 157.34 | 0.11 |
| f6 (X) | 182.14 | 182.68 | 0.30 | 200.79 | 200.65 | 0.07 | 187.94 | 188.05 | 0.06 |
References
- Pelfrey, J.; Jordan, L. An EXPRESS Rack overview and support for microgravity research on the International Space Station (ISS). In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 7–10 January 2008; p. 819. [Google Scholar]
- Grodsinsky, C.M.; Whorton, M.S. Survey of active vibration isolation systems for microgravity applications. J. Spacecr. Rockets 2000, 37, 586–596. [Google Scholar] [CrossRef] [Green Version]
- Ping, W. China Manned Space Programme: Its Achievements and Future Developments; China Manned Space Agency: Beijing, China, 2016. [Google Scholar]
- Liu, W.; Zhang, B.; Shen, C. Stability analysis for spatial autoparametric resonances of framed structures. Int. J. Struct. Stab. Dyn. 2022, 22, 2250065. [Google Scholar] [CrossRef]
- Song, Y.; Hartwigsen, C.J.; McFarland, D.M. Simulation of dynamics of beam structures with bolted joints using adjusted Iwan beam elements. J. Sound. Vib. 2004, 273, 249–276. [Google Scholar] [CrossRef]
- Hartwigsen, C.J.; Song, Y.; McFarland, D.M. Experimental study of non-linear effects in a typical shear lap joint configuration. J. Sound. Vib. 2004, 277, 327–351. [Google Scholar] [CrossRef]
- Genbei, Z.; Chaoping, Z.; Xiaowei, W. Finite element model updating of a framed structure with bolted joints. Eng. Mech. 2014, 31, 26–33. [Google Scholar]
- Chang, H.; Ma, R. Simulation of ducts and passages with negative-area spatial truss element in 3d creep analysis of reinforced concrete and prestressed concrete bridge. KSCE J. Civ. Eng. 2021, 25, 2053–2064. [Google Scholar] [CrossRef]
- Sliseris, J.; Gaile, L.; Pakrastins, L. Extended multiscale FEM for design of beams and frames with complex topology. Appl. Math. Model. 2019, 69, 77–92. [Google Scholar] [CrossRef]
- Yuan, Q. Alternating direction method for structure-persevering finite element model updating problem. Appl. Math. Comput. 2013, 223, 461–471. [Google Scholar] [CrossRef]
- Friswell, M.I.; Inman, D.J.; Pilkey, D.F. Direct updating of damping and stiffness matrices. AIAA J. 1998, 36, 491–494. [Google Scholar] [CrossRef] [Green Version]
- Fox, R.L.; Kapoor, M.P. Rates of change of eigenvalues and eigenvectors. AIAA J. 2012, 6, 2426–2429. [Google Scholar] [CrossRef]
- Friswell, M.I.; Mottershead, J.E.; Ahmadian, H. Finite element model updating using experimental test data: Parametrization and regularization. Philos. Trans. R. Soc. Lond. Ser. A-Math. Phys. Eng. Sci. 2001, 359, 169–186. [Google Scholar] [CrossRef]
- Liu, Y.; Duan, Z.D. Fuzzy finite element model updating of bridges by considering the uncertainty of the measured modal parameters. Sci. China Technol. Sci. 2012, 55, 3109–3117. [Google Scholar] [CrossRef]
- Hızal, Ç.; Turan, G. A two-stage Bayesian algorithm for finite element model updating by using ambient response data from multiple measurement setups. J. Sound Vib. 2020, 469, 115139. [Google Scholar] [CrossRef]
- Hadjian-Shahri, A.H.; Ghorbani-Tanha, A.K. Damage detection via closed-form sensitivity matrix of modal kinetic energy change ratio. J Sound Vib. 2017, 401, 268–281. [Google Scholar] [CrossRef]
- Mottershead, J.E.; Link, M.; Friswell, M.I. The sensitivity method in finite element model updating: A tutorial. Mech. Syst. Signal Process. 2011, 25, 2275–2296. [Google Scholar] [CrossRef]
- Cao, Z.; Fei, Q.; Jiang, D. A sensitivity-based nonlinear finite element model updating method for nonlinear engineering structures. Appl. Math. Model. 2021, 100, 632–655. [Google Scholar] [CrossRef]
- Izham, M.H.N.; Abdullah, N.A.Z.; Zahari, S.N. Structural dynamic investigation of frame structure with bolted joints. MATEC Web of Conferences. EDP Sci. 2017, 90, 01043. [Google Scholar]
- Umar, S.; Bakhary, N.; Abidin, A.R.Z. Response surface methodology for damage detection using frequency and mode shape. Measurement 2018, 115, 258–268. [Google Scholar] [CrossRef]
- Niu, J.; Zong, Z.H.; Chu, F.P. Damage identification method of girder bridges based on finite element model updating and modal strain energy. Sci. China Technol. Sci. 2015, 58, 701–711. [Google Scholar] [CrossRef]
- Zhang, K. Study on Multi-Scale Modeling Method Based on Multi-Point Constrained Equation; Chongqing University: Chongqing, China, 2019. [Google Scholar]
- Lin, L.; Ding, Z.; Zeng, J. Research on the transmission loss of the floor aluminum profile for the high-speed train based on FE-SEA hybrid method. J. Vibroeng. 2016, 18, 1968–1981. [Google Scholar] [CrossRef] [Green Version]
- Kleijnen, J.P. Kriging metamodeling in simulation: A review. Eur. J. Oper. Res. 2009, 192, 707–716. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.R.; Zheng, H.L.; Wang, W.K. A method for tracing key geometric errors of vertical machining center based on global sensitivity analysis. Int. J. Adv. Manuf. Technol. 2020, 106, 3943–3956. [Google Scholar] [CrossRef]
- Gres, S.; Dhler, M.; Mevel, L. Uncertainty quantification of the modal assurance criterion in operational modal analysis. Mech. Syst. Sig. Process. 2021, 152, 107457. [Google Scholar] [CrossRef]
















| FE Model | Component | Unit Type | Material | Number of Elements | Number of Nodes |
|---|---|---|---|---|---|
| Mixed FE model | Backplane | Shell181 | Q235 | 27,594 | 57,961 |
| Drawer board | Shell181 | Q235 | |||
| Beam | Beam188 | 6063 | |||
| Bolt | Beam188 | Structural steel | |||
| Others | Solid186 | Q235 | |||
| Fine solid FE model | Backplane | Solid186 | Q235 | 65,883 | 135,294 |
| Drawer board | Solid186 | Q235 | |||
| Beam | Solid186 | 6063 | |||
| Bolt | Solid186 | Structural steel | |||
| Others | Solid186 | Q235 |
| Modal Order | Modal Frequency | ||||
|---|---|---|---|---|---|
| Test (Hz) | Fine Solid FEM (Hz) | Error (%) | Mixed FEM (Hz) | Error (%) | |
| 1 | 42.90 | 45.98 | 7.16 | 46.35 | 8.03 |
| 2 | 69.82 | 68.60 | 1.75 | 73.66 | 5.50 |
| 3 | 96.42 | 99.32 | 3.00 | 105.03 | 8.92 |
| 4 | 119.26 | 125.51 | 5.24 | 135.64 | 13.73 |
| 5 | 153.47 | 172.77 | 12.50 | 175.67 | 14.47 |
| 6 | 186.89 | 194.03 | 3.82 | 200.17 | 7.10 |
| Parameter | Type | Level 1 | Level 2 | Level 3 | Expression |
|---|---|---|---|---|---|
| Elastic modulus (Pa) | E1 | 5.68 × 1010 | 7.1 × 1010 | 8.52 × 1010 | X1 |
| E2 | 1.68 × 1011 | 2.1 × 1011 | 2.52 × 1011 | X2 | |
| E3 | 5.68 × 1010 | 7.1 × 1010 | 8.52 × 1010 | X3 | |
| Density (kg/m3) | D1 | 2216 | 2770 | 3324 | X4 |
| D2 | 6280 | 7850 | 9420 | X5 |
| Test Number | Factor | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 2 | 1 | 2 | 2 | 2 | 2 | 2 | 2 |
| 3 | 1 | 3 | 3 | 3 | 3 | 3 | 3 |
| 4 | 2 | 1 | 1 | 2 | 2 | 3 | 3 |
| 5 | 2 | 2 | 2 | 3 | 3 | 1 | 1 |
| 6 | 2 | 3 | 3 | 1 | 1 | 2 | 2 |
| 7 | 3 | 1 | 2 | 1 | 3 | 2 | 3 |
| 8 | 3 | 2 | 3 | 2 | 1 | 3 | 1 |
| 9 | 3 | 3 | 1 | 3 | 2 | 1 | 2 |
| 10 | 1 | 1 | 3 | 3 | 2 | 2 | 1 |
| 11 | 1 | 2 | 1 | 1 | 3 | 3 | 2 |
| 12 | 1 | 3 | 2 | 2 | 1 | 1 | 3 |
| 13 | 2 | 1 | 2 | 3 | 1 | 3 | 2 |
| 14 | 2 | 2 | 3 | 1 | 2 | 1 | 3 |
| 15 | 2 | 3 | 1 | 2 | 3 | 2 | 1 |
| 16 | 3 | 1 | 3 | 2 | 3 | 1 | 2 |
| 17 | 3 | 2 | 1 | 3 | 1 | 2 | 3 |
| 18 | 3 | 3 | 2 | 1 | 2 | 3 | 1 |
| Test Number | Order | |||||
|---|---|---|---|---|---|---|
| 1st Order (Hz) | 2nd Order (Hz) | 3rd Order (Hz) | 4th Order (Hz) | 5th Order (Hz) | 6th Order (Hz) | |
| 1 | 48.59 | 74.18 | 108.44 | 137.97 | 178.98 | 204.38 |
| 2 | 45.56 | 70.19 | 102.09 | 131.06 | 169.95 | 199.07 |
| 3 | 43.10 | 66.92 | 96.89 | 125.46 | 162.36 | 193.54 |
| 4 | 46.00 | 69.55 | 102.36 | 129.38 | 167.72 | 185.40 |
| 5 | 44.18 | 67.33 | 98.70 | 125.67 | 163.20 | 185.35 |
| 6 | 56.05 | 85.94 | 125.66 | 161.56 | 209.49 | 243.31 |
| 7 | 46.83 | 70.48 | 105.21 | 127.75 | 169.34 | 175.77 |
| 8 | 56.64 | 85.42 | 125.58 | 159.93 | 208.27 | 232.17 |
| 9 | 48.68 | 74.06 | 107.86 | 142.55 | 179.60 | 210.00 |
| 10 | 44.91 | 68.57 | 99.34 | 126.00 | 166.29 | 189.44 |
| 11 | 41.78 | 64.53 | 94.50 | 120.19 | 154.92 | 179.99 |
| 12 | 50.42 | 78.06 | 112.23 | 148.44 | 189.49 | 226.97 |
| 13 | 50.74 | 76.38 | 111.55 | 143.02 | 185.28 | 209.34 |
| 14 | 50.44 | 76.97 | 113.62 | 141.73 | 186.71 | 207.67 |
| 15 | 44.10 | 67.79 | 99.01 | 128.58 | 163.52 | 191.62 |
| 16 | 47.29 | 71.04 | 105.80 | 128.35 | 171.34 | 178.49 |
| 17 | 52.18 | 78.66 | 114.58 | 151.38 | 190.83 | 221.34 |
| 18 | 52.30 | 79.72 | 117.56 | 149.96 | 193.32 | 218.22 |
| Parameter | 1st Order | 2nd Order | 3rd Order | 4th Order | 5th Order | 6th Order |
|---|---|---|---|---|---|---|
| X1 | 1 | 1 | 1 | 1 | 1 | 1 |
| X2 | 0 | 0 | 0 | 1 | 0 | 1 |
| X3 | 1 | 1 | 1 | 0 | 1 | 1 |
| X4 | 0 | 0 | 0 | 0 | 0 | 0 |
| X5 | 1 | 1 | 1 | 1 | 1 | 1 |
| Measuring Points | Test | Solid FE Model | Error | Mixed Model | Error | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Amplitude (g) | Frequency (Hz) | Amplitude (g) | Frequency (Hz) | Amplitude (%) | Frequency (%) | Amplitude (g) | Frequency (Hz) | Amplitude (%) | Frequency (%) | |
| A1 | 0.37 | 88.85 | 0.38 | 87 | 3.60 | 2.08 | 0.36 | 85 | 1.60 | 4.33 |
| A2 | 0.66 | 88.11 | 0.64 | 87 | 4.20 | 1.26 | 0.70 | 85 | 5.29 | 3.53 |
| A3 | 4.59 | 88.37 | 4.45 | 87 | 3.00 | 1.55 | 4.56 | 85 | 0.65 | 3.81 |
| Measuring Point | Measured RMS (g) | RMS of Solid FE Model (g) | Error (%) | RMS of Mixed FE Model (g) | Error (%) |
|---|---|---|---|---|---|
| A1 | 4.24 | 4.09 | 3.50 | 4.50 | 6.26 |
| A4 | 12.62 | 13.32 | 5.56 | 13.03 | 3.23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Q.; Han, Q.; Liu, J.; Yu, C. High-Accuracy Finite Element Model Updating a Framed Structure Based on Response Surface Method and Partition Modification. Aerospace 2023, 10, 79. https://doi.org/10.3390/aerospace10010079
Zhu Q, Han Q, Liu J, Yu C. High-Accuracy Finite Element Model Updating a Framed Structure Based on Response Surface Method and Partition Modification. Aerospace. 2023; 10(1):79. https://doi.org/10.3390/aerospace10010079
Chicago/Turabian StyleZhu, Qingyu, Qingkai Han, Jinguo Liu, and Changshuai Yu. 2023. "High-Accuracy Finite Element Model Updating a Framed Structure Based on Response Surface Method and Partition Modification" Aerospace 10, no. 1: 79. https://doi.org/10.3390/aerospace10010079