


Network Sliced Distributed Learning-as-a-Service for Internet of Vehicles Applications in 6G Non-Terrestrial Network Scenarios




Abstract
:1. Introduction
- Comprehensive Analysis: We conduct an in-depth exploration of key technological innovations and various DL methods, laying the groundwork for subsequent developments.
- DLaaS Framework: We introduce an innovative DLaaS framework, representing a paradigm shift that seamlessly integrates DL, NS, and distributed computing/communication methods.
- Adaptation for IoV: We elucidate the adaptation of the framework specifically for IoV applications, revealing its potential in shaping the future of intelligent vehicular networks.
- Case Study and Performance Analysis: We provide a detailed case study and performance analysis, offering empirical evidence of the efficacy and practical implications of DLaaS in real-world scenarios.
2. IoV Distributed Intelligence
2.1. Edge/Cloud Computing
2.2. Network Slicing
2.3. Overview of Distributed Learning Methods
2.4. Intelligence at the Edge for IoV
2.4.1. Applications
2.4.2. Aspects and Advantages
- Real-time Decision-Making: By embedding intelligence at the edge, vehicles can make local, real-time decisions without relying on a centralized cloud server. This is critical for applications such as emergency braking and collision avoidance that require quick reactions [49].
- Reduced Latency: Edge computing minimizes the delay in processing the data, since computations occur closer to the source of the data. This is particularly crucial in the IoV, where accurate and timely responses to dynamic traffic conditions depend on low-latency communication [50].
- Bandwidth Efficiency: Processing data at the edge reduces the need to transmit large amounts of raw data to a central server for analysis. Instead, only relevant or summarized information can be sent, optimizing bandwidth usage in IoV networks [51].
- Enhanced Privacy and Security: Edge intelligence allows data processing to occur locally, addressing concerns related to privacy and security. Sensitive information can be processed within the vehicle, minimizing the exposure of personal data to external networks [52].
- Distributed Computing: Edge computing in IoV involves a distributed computing paradigm where intelligence is distributed across vehicles and road infrastructure. This decentralized approach enables collaborative decision-making and more efficient utilization of resources [53].
- Scalability: Edge computing supports scalability in IoV applications. As the number of connected vehicles increases, edge devices can handle processing tasks locally, preventing bottlenecks on centralized cloud servers [54].
- Adaptive learning: Intelligent edge devices can employ machine learning algorithms to adapt and improve their performance based on the data they process. This adaptability is valuable in IoV scenarios where traffic patterns and conditions can change dynamically [55].
- Offline operation: Edge intelligence allows vehicles to perform certain tasks even when not connected to the central network. This offline operation is beneficial in scenarios where network connectivity may be intermittent or unavailable [56].
3. Network Sliced Distributed Learning
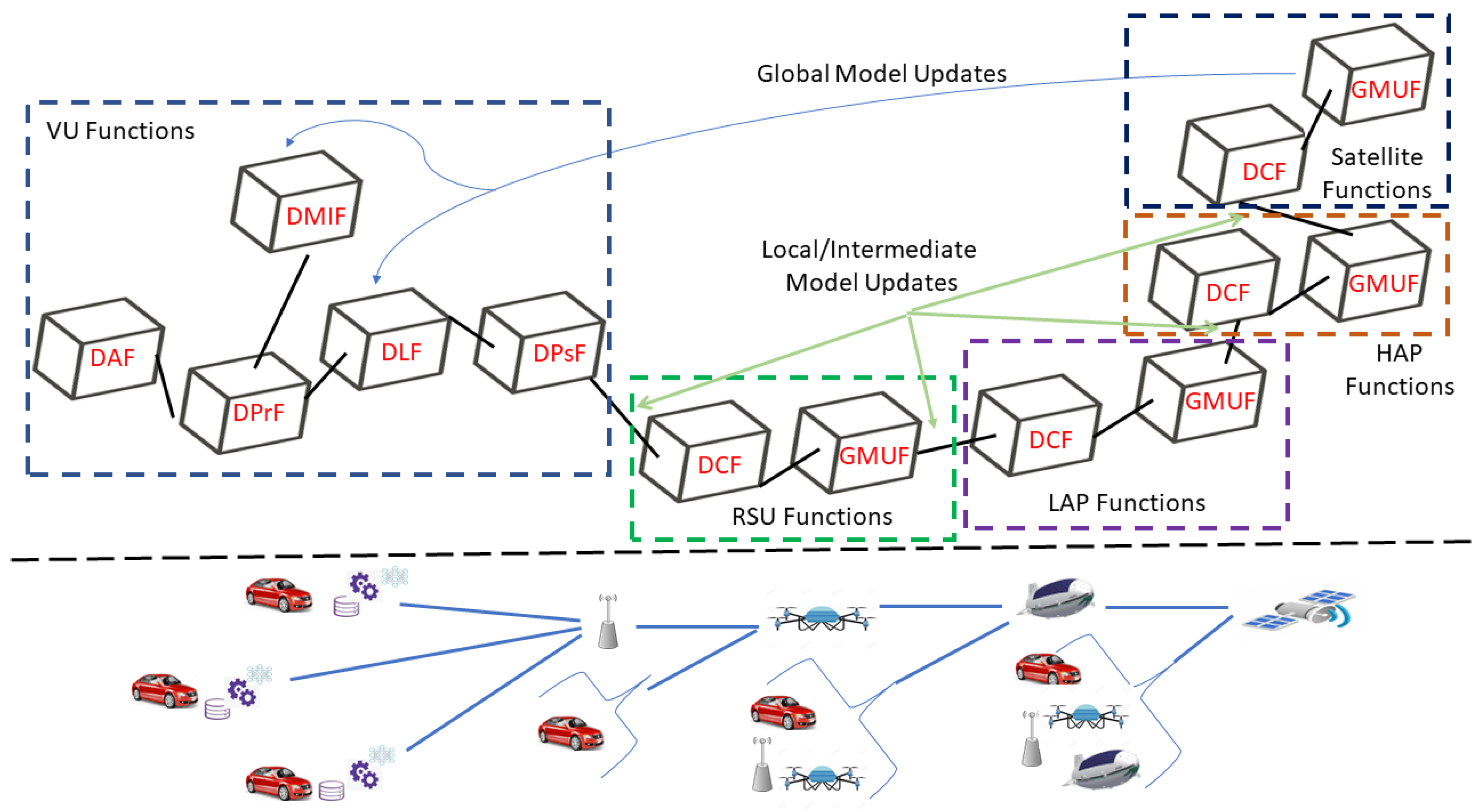
3.1. End-to-End Functional Decomposition of DL
- Data Acquisition Function (DAF): Generally, distributed training operations involve several learning devices collaboratively performing the learning process. In the case of vehicular scenarios, this can be geographically distributed sets of vehicles moving across road networks. For the case of DL, learning devices need their own datasets to perform the training process, which can be collected through a data acquisition mechanism that involves a set of sensory nodes, processing devices, and data collection devices. The process that allows the composition of the learning dataset can be defined through a typical data acquisition function. Note that such functions can only be implemented on nodes/devices with typical hardware settings. With new vehicular nodes equipped with several sensory nodes, they can collect large amounts of data samples over time through DAF that can be exploited for a successful implementation of DL.
- Data Preprocessing Function (DPrF): In general, the learning data acquired through DAF can be in different formats, e.g., texts, images, videos, etc. Based on the learning tasks, the selected learning method, and their requirements, these data need to be pre-processed in a typical form. This can be achieved through learning data preprocessing methods implemented through a Data Preprocessing Function (DPrF). This function can have methods for data cleaning, data dimensionality reduction, data normalization, etc. DPrF function can help reduce the overall size of the original datasets, and thus reduce the communication overhead for some typical DL methods where data parallelization techniques involving learning data transfer are needed. Thus, preferably, this function needs to be implemented alongside the DAF function to avoid possible communication overheads.
- Distributed Learning Function (DLF): In DL frameworks, the learning process can be performed on different nodes, e.g., end devices or edge nodes, according to the learning frameworks adopted. The end devices can do the learning process themselves for some simplified learning tasks. In some cases, collaborative learning frameworks can be adopted for complex learning models such as DNN, allowing different devices to collaboratively train the models (e.g., through different model split techniques). In another case, a data parallelism approach can be adopted, allowing struggling end devices with limited computational resources to send their data to the nearby devices/edge nodes to complete the training process in time. Therefore, a distributed learning function (DLF) is needed that adopts the selected learning strategy for the successful implementation of DL. Typical learning steps, such as learning model selection, hyperparameter settings, stochastic gradient descent (SGD), and backpropagation, can be part of a holistic DLF that can be implemented on distributed nodes.
- Data Post Processing function (DPsF): In a typical DL process, after performing the learning steps through DLF, the parameter updates must be sent to the parameter server or other learning nodes based on the adopted learning strategy. Often, data processing is needed to avoid communication overhead, limit data security risks, and add the appropriate weighting coefficients to the learning process results. This method can be implemented through a Data Post Processing Function (DPsF) that processes the learned data before its transmission to the outside world.
- Data Collection Function (DCF): In each DL cycle, parameter servers are required to collect learning updates from the devices and create a global update that can be used for the next round of communication. The data received by the servers may have additional information, encryption, noise, etc., and are required to be processed before taking into account the global model update. The Data Collection Function (DCF) includes the steps to collect data from learning devices and prepare them for the global update to be performed.
- Global Model Update Function (GMUF): The Global Model Update Function (GMUF) performs the updates of the learning model based on learning data. The DCF function results are further processed with some mechanisms, i.e., the averaging process for creating a global model. These model parameters are sent back to the devices or upper layers for further processing. GMUF function can have methods for generating, pre-processing, and transmitting global model parameters over different distributed nodes.
- Distributed Model Inference Function (DMIF): Model inference is an important step that must be considered for the successful implementation of AI applications based on DL. End users can adopt various forms of inference mechanism for the successful implementation of DL applications based on resource availability and application requirements. These methods and processes can be included in the Distributed Model Inference Function (DMIF). Based on resource availability and application performance requirements, different model inference strategies can be adopted. If a model in question is simple and requires limited computations, inference can be performed on the device itself, increasing the data security. However, in the case where the model requires a large number of parameters with a large computation cost, inference operations can be performed at edge or cloud layers. In some cases, joint strategies (e.g., device-edge, device-edge-cloud) can also be adopted with model-split operations. This creates different possible deployment options for the DMIF function.
3.2. DL-as-a-Service for IoV Applications
3.2.1. Proposed Methods
3.2.2. DLaaS Advantages
3.2.3. DLaaS Challenges
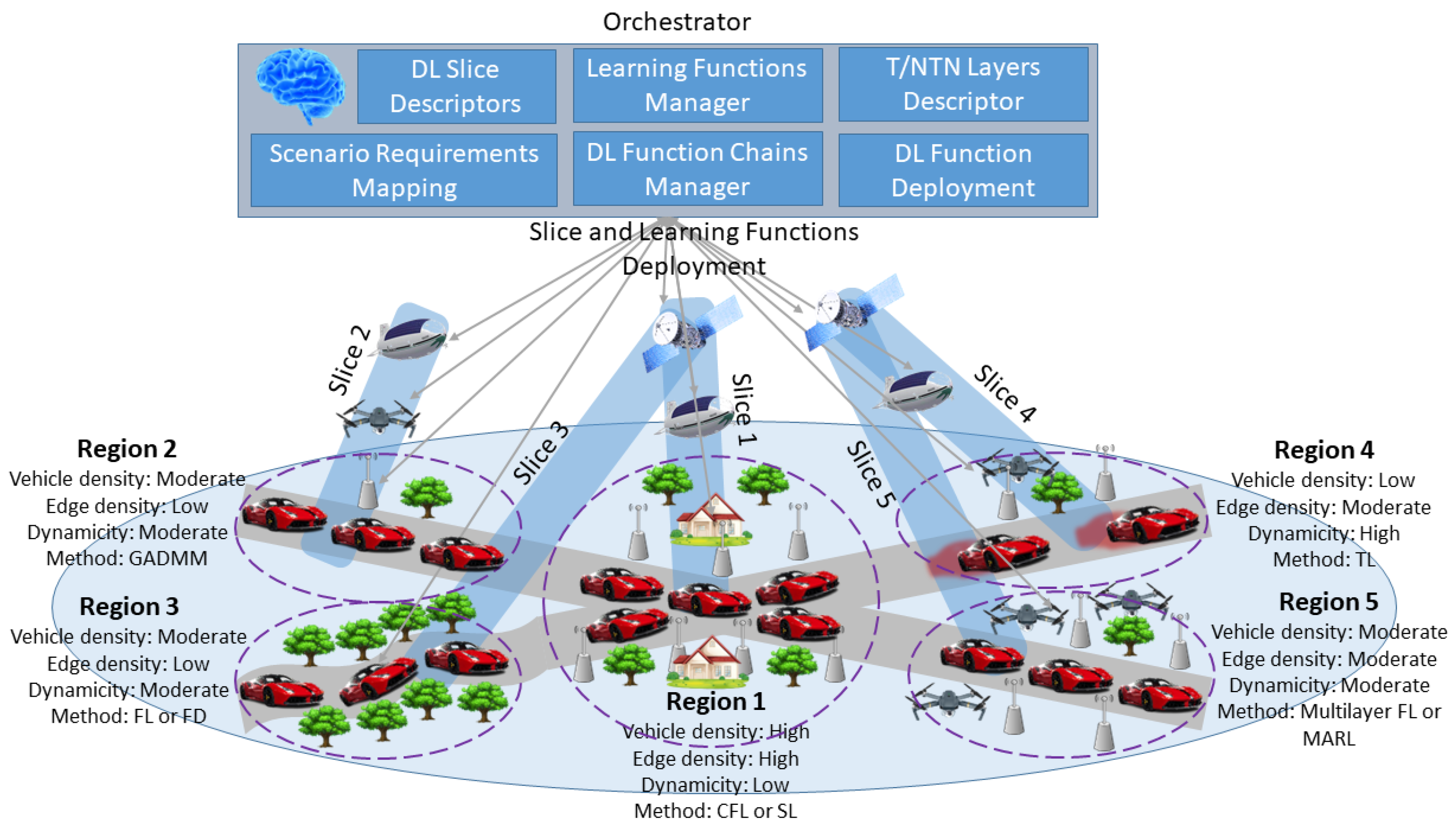
3.3. DLaaS Architecture for IoV
4. Case Study
4.1. Scenario Description
4.2. Function Deployment
4.3. Network Resources and Simulation Parameters
4.4. Key Performance Indicators
- Latency:
- -
- Definition: Latency measures the delay experienced by Vehicular Users (VUs) in obtaining responses from the DLaaS framework.
- -
- Simulation: The latency satisfaction, denoted as , is calculated as the percentage of users for whom the latency requirements are met:
- Privacy:
- -
- Definition: Privacy represents the level of data security and confidentiality maintained during DL processes.
- -
- Simulation: Privacy satisfaction, denoted as , is calculated similarly based on the percentage of users for whom privacy requirements are met.
- Mobility:
- -
- Definition: Mobility reflects the ability of VUs to maintain seamless connectivity while traversing diverse geographical regions.
- -
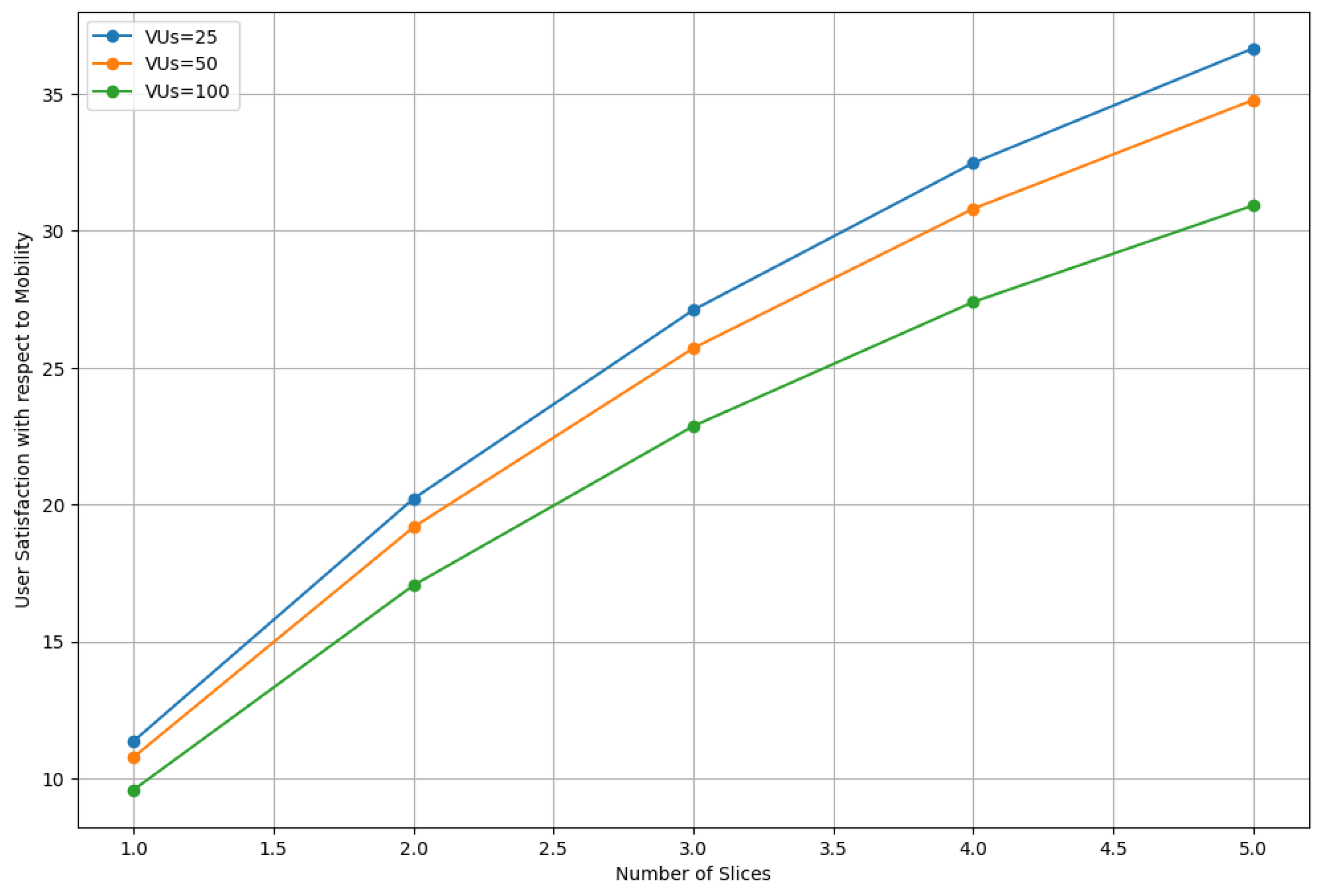
- Simulation: Mobility satisfaction, denoted as , is calculated based on the percentage of users meeting mobility requirements.
- Computing Capacity:
- -
- Definition: Computing capacity denotes the ability of the DLaaS framework to handle computational demands efficiently.
- -
- Simulation: Computing capacity satisfaction, denoted as , is calculated similarly based on the percentage of users meeting computing capacity requirements.
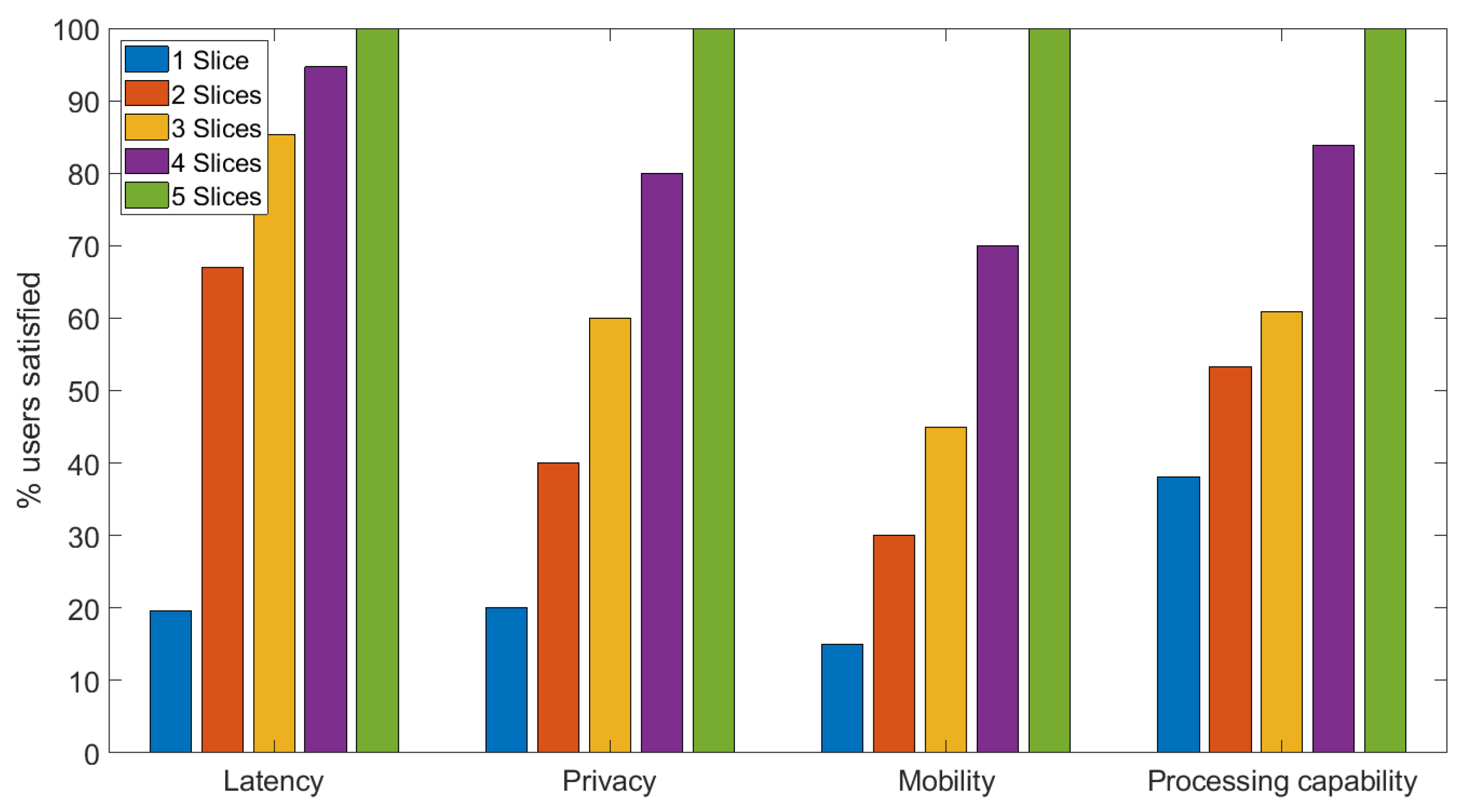
4.5. Impact of Multiple Slices on User Satisfaction
4.5.1. Mobility
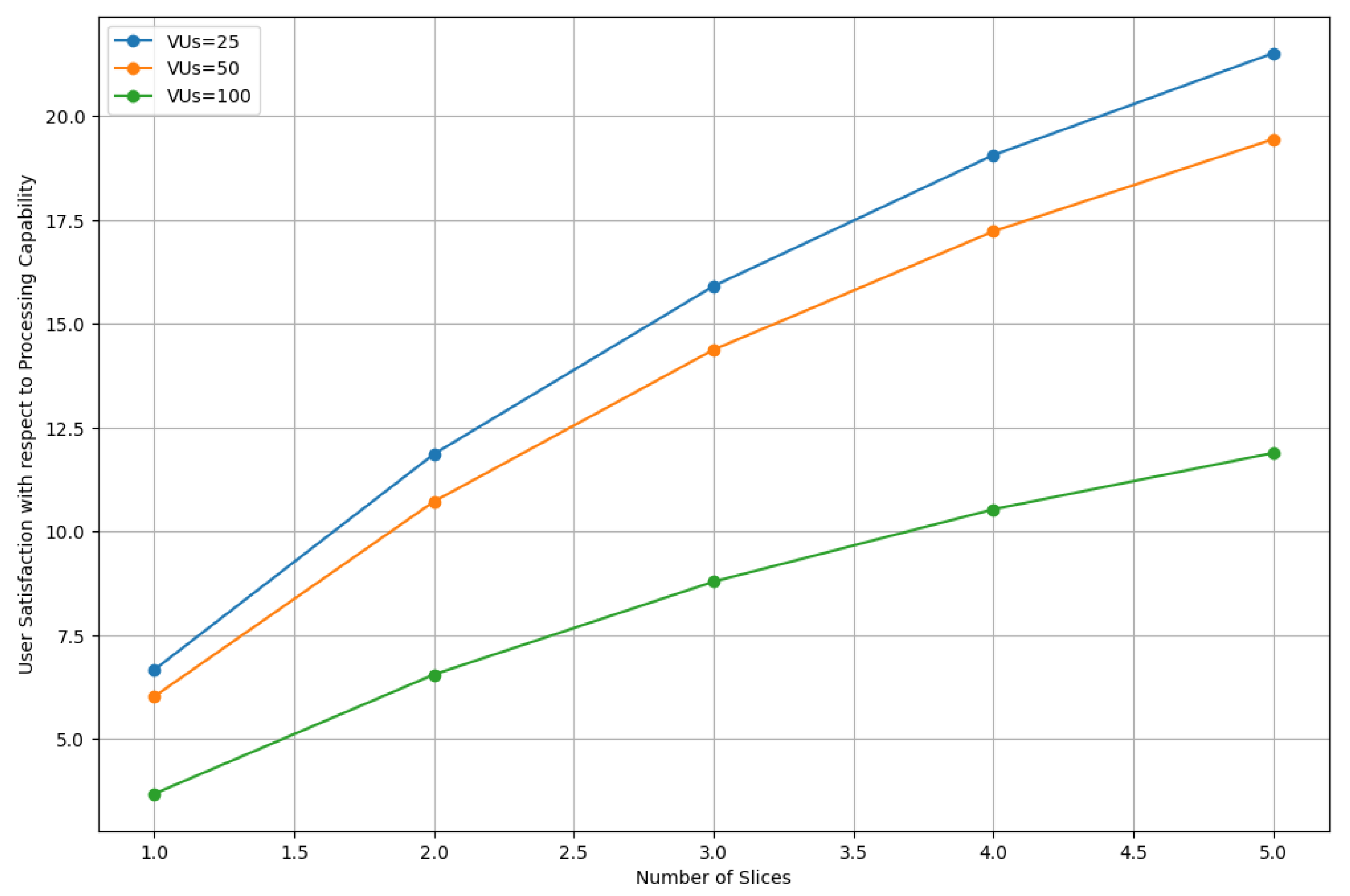
4.5.2. Processing Capacity
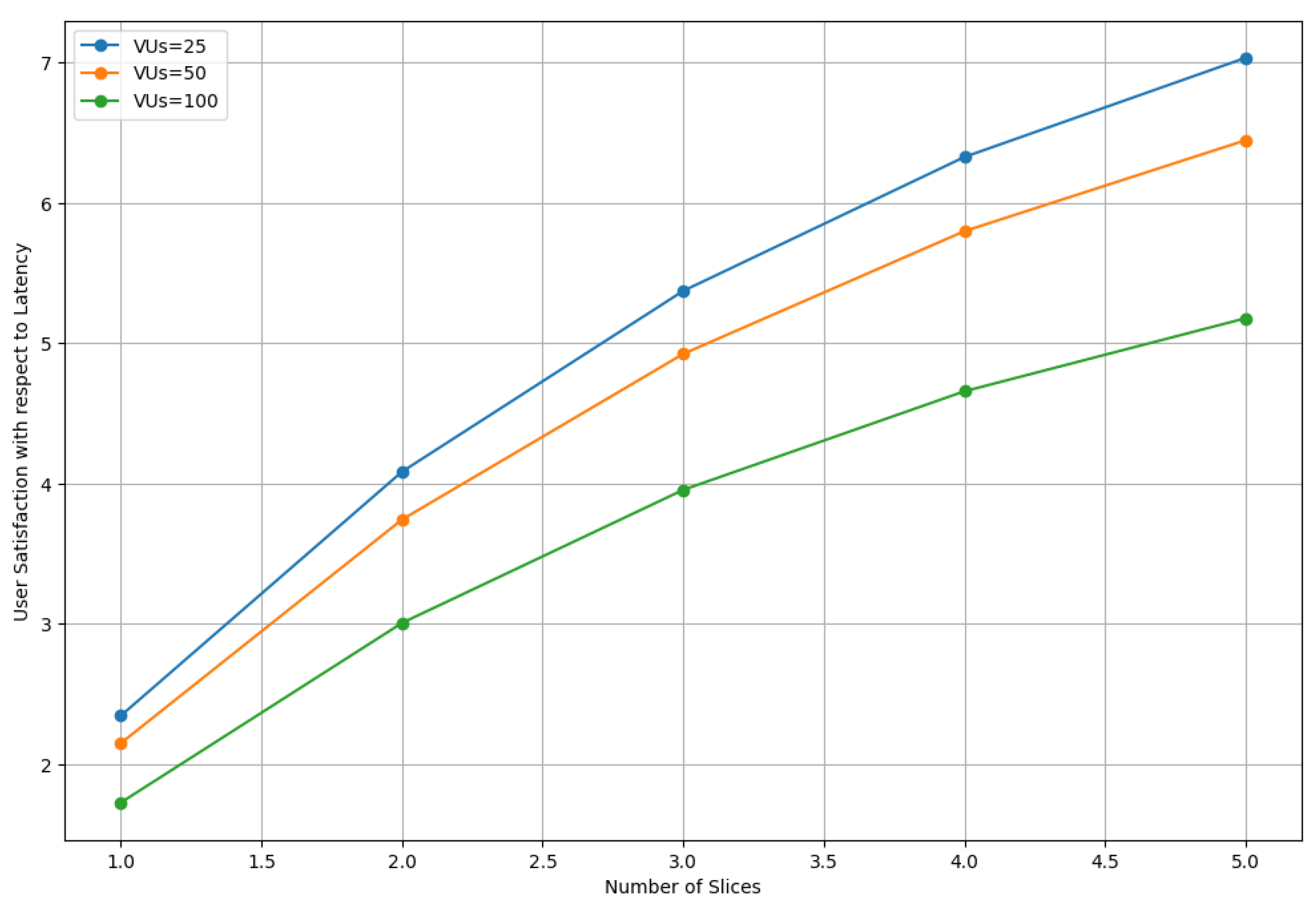
4.5.3. Average Latency
4.6. Average Response Time
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, F.; Mao, B.; Kato, N.; Gui, G. Comprehensive Survey on Machine Learning in Vehicular Network: Technology, Applications and Challenges. IEEE Commun. Surv. Tutor. 2021, 23, 2027–2057. [Google Scholar] [CrossRef]
- Posner, J.; Tseng, L.; Aloqaily, M.; Jararweh, Y. Federated Learning in Vehicular Networks: Opportunities and Solutions. IEEE Netw. 2021, 35, 152–159. [Google Scholar] [CrossRef]
- Chen, M.; Gündüz, D.; Huang, K.; Saad, W.; Bennis, M.; Feljan, A.V.; Poor, H.V. Distributed Learning in Wireless Networks: Recent Progress and Future Challenges. IEEE J. Sel. Areas Commun. 2021, 39, 3579–3605. [Google Scholar] [CrossRef]
- Duan, S.; Wang, D.; Ren, J.; Lyu, F.; Zhang, Y.; Wu, H.; Shen, X. Distributed Artificial Intelligence Empowered by End-Edge-Cloud Computing: A Survey. IEEE Commun. Surv. Tutor. 2023, 25, 591–624. [Google Scholar] [CrossRef]
- Afolabi, I.; Taleb, T.; Samdanis, K.; Ksentini, A.; Flinck, H. Network Slicing and Softwarization: A Survey on Principles, Enabling Technologies, and Solutions. IEEE Commun. Surv. Tutor. 2018, 20, 2429–2453. [Google Scholar] [CrossRef]
- Cheng, Z.; Gao, Z.; Liwang, M.; Huang, L.; Du, X.; Guizani, M. Intelligent Task Offloading and Energy Allocation in the UAV-Aided Mobile Edge-Cloud Continuum. IEEE Netw. 2021, 35, 42–49. [Google Scholar] [CrossRef]
- Shang, B.; Yi, Y.; Liu, L. Computing over Space-Air-Ground Integrated Networks: Challenges and Opportunities. IEEE Netw. 2021, 35, 302–309. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Champagne, B.; Zhu, W.P.; Al-Dhahir, N. Secrecy-Energy Efficient Hybrid Beamforming for Satellite-Terrestrial Integrated Networks. IEEE Trans. Commun. 2021, 69, 6345–6360. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Hu, Y.; Li, D.; Wang, J.; Al-Dhahir, N. Pain without Gain: Destructive Beamforming from a Malicious RIS Perspective in IoT Networks. IEEE Internet Things J. 2023; early access. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Wang, Y.; Zheng, G.; Chatzinotas, S.; Hu, Y. Refracting RIS-Aided Hybrid Satellite-Terrestrial Relay Networks: Joint Beamforming Design and Optimization. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3717–3724. [Google Scholar] [CrossRef]
- Sun, Y.; An, K.; Zhu, Y.; Zheng, G.; Wong, K.K.; Chatzinotas, S.; Ng, D.W.K.; Guan, D. Energy-Efficient Hybrid Beamforming for Multilayer RIS-Assisted Secure Integrated Terrestrial-Aerial Networks. IEEE Trans. Commun. 2022, 70, 4189–4210. [Google Scholar] [CrossRef]
- Thakur, P.; Singh, G. Cooperative Spectrum Monitoring in Homogeneous and Heterogeneous Cognitive Radio Networks. In Spectrum Sharing in Cognitive Radio Networks: Towards Highly Connected Environments; Wiley Telecom: Hoboken, NJ, USA, 2021; pp. 121–146. [Google Scholar] [CrossRef]
- Thakur, P.; Singh, G. Radio Resource Management in Internet-of-Vehicles. In Spectrum Sharing in Cognitive Radio Networks: Towards Highly Connected Environments; Wiley Telecom: Hoboken, NJ, USA, 2021; pp. 311–338. [Google Scholar] [CrossRef]
- Thakur, P.; Singh, G. Interference Management in Cognitive Radio Networks. In Spectrum Sharing in Cognitive Radio Networks: Towards Highly Connected Environments; Wiley Telecom: Hoboken, NJ, USA, 2021; pp. 255–279. [Google Scholar] [CrossRef]
- Mishra, P.; Singh, G. 6G-IoT Framework for Sustainable Smart City: Vision and Challenges. In Sustainable Smart Cities: Enabling Technologies, Energy Trends and Potential Applications; Springer International Publishing: Cham, Switzerland, 2023; pp. 97–117. [Google Scholar] [CrossRef]
- Deng, S.; Zhao, H.; Fang, W.; Yin, J.; Dustdar, S.; Zomaya, A.Y. Edge Intelligence: The Confluence of Edge Computing and Artificial Intelligence. IEEE Internet Things J. 2020, 7, 7457–7469. [Google Scholar] [CrossRef]
- Manias, D.M.; Chouman, A.; Al-Dulaimi, A.; Shami, A. Slice-Level Performance Metric Forecasting in Intelligent Transportation Systems and the Internet of Vehicles. IEEE Internet Things Mag. 2023, 6, 56–61. [Google Scholar] [CrossRef]
- Wu, Y.; Dai, H.N.; Wang, H.; Xiong, Z.; Guo, S. A Survey of Intelligent Network Slicing Management for Industrial IoT: Integrated Approaches for Smart Transportation, Smart Energy, and Smart Factory. IEEE Commun. Surv. Tutor. 2022, 24, 1175–1211. [Google Scholar] [CrossRef]
- Laroui, M.; Nour, B.; Moungla, H.; Cherif, M.A.; Afifi, H.; Guizani, M. Edge and fog computing for IoT: A survey on current research activities & future directions. Comput. Commun. 2021, 180, 210–231. [Google Scholar] [CrossRef]
- Elbamby, M.S.; Perfecto, C.; Liu, C.F.; Park, J.; Samarakoon, S.; Chen, X.; Bennis, M. Wireless Edge Computing with Latency and Reliability Guarantees. Proc. IEEE 2019, 107, 1717–1737. [Google Scholar] [CrossRef]
- Deng, Y.; Chen, X.; Zhu, G.; Fang, Y.; Chen, Z.; Deng, X. Actions at the Edge: Jointly Optimizing the Resources in Multi-Access Edge Computing. IEEE Wirel. Commun. 2022, 29, 192–198. [Google Scholar] [CrossRef]
- Zeng, D.; Ansari, N.; Montpetit, M.J.; Schooler, E.M.; Tarchi, D. Guest Editorial: In-Network Computing: Emerging Trends for the Edge-Cloud Continuum. IEEE Netw. 2021, 35, 12–13. [Google Scholar] [CrossRef]
- Mei, J.; Wang, X.; Zheng, K. Intelligent Network Slicing for V2X Services Toward 5G. IEEE Netw. 2019, 33, 196–204. [Google Scholar] [CrossRef]
- Muscinelli, E.; Shinde, S.S.; Tarchi, D. Overview of Distributed Machine Learning Techniques for 6G Networks. Algorithms 2022, 15, 210. [Google Scholar] [CrossRef]
- Verbraeken, J.; Wolting, M.; Katzy, J.; Kloppenburg, J.; Verbelen, T.; Rellermeyer, J.S. A Survey on Distributed Machine Learning. ACM Comput. Surv. 2020, 53, 30. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, X.; Zhang, K.; Maharjan, S.; Zhang, Y. Blockchain Empowered Asynchronous Federated Learning for Secure Data Sharing in Internet of Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 4298–4311. [Google Scholar] [CrossRef]
- Ridolfi, L.; Naseh, D.; Shinde, S.S.; Tarchi, D. Implementation and Evaluation of a Federated Learning Framework on Raspberry PI Platforms for IoT 6G Applications. Future Internet 2023, 15, 358. [Google Scholar] [CrossRef]
- Cui, Y.; Cao, K.; Zhou, J.; Wei, T. Optimizing Training Efficiency and Cost of Hierarchical Federated Learning in Heterogeneous Mobile-Edge Cloud Computing. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2023, 42, 1518–1531. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, W.; Pu, L.; Lin, T.; Yan, J. To Distill or Not To Distill: Towards Fast, Accurate and Communication Efficient Federated Distillation Learning. IEEE Internet Things J. 2023; early access. [Google Scholar] [CrossRef]
- Naseh, D.; Shinde, S.S.; Tarchi, D. Enabling Intelligent Vehicular Networks Through Distributed Learning in the Non-Terrestrial Networks 6G Vision. In Proceedings of the 28th European Wireless Conference (EW2023), Rome, Italy, 2–4 October 2023; pp. 129–134. [Google Scholar] [CrossRef]
- Chen, M.; Poor, H.V.; Saad, W.; Cui, S. Wireless Communications for Collaborative Federated Learning. IEEE Commun. Mag. 2020, 58, 48–54. [Google Scholar] [CrossRef]
- Shao, C.; Cheng, F.; Xiao, J.; Zhang, K. Vehicular intelligent collaborative intersection driving decision algorithm in Internet of Vehicles. Future Gener. Comput. Syst. 2023, 145, 384–395. [Google Scholar] [CrossRef]
- Song, R.; Liu, D.; Chen, D.Z.; Festag, A.; Trinitis, C.; Schulz, M.; Knoll, A. Federated Learning via Decentralized Dataset Distillation in Resource-Constrained Edge Environments. In Proceedings of the 2023 International Joint Conference on Neural Networks (IJCNN), Gold Coast, Australia, 18–23 June 2023; pp. 1–10. [Google Scholar] [CrossRef]
- Elgabli, A.; Park, J.; Bedi, A.S.; Issaid, C.B.; Bennis, M.; Aggarwal, V. Q-GADMM: Quantized Group ADMM for Communication Efficient Decentralized Machine Learning. IEEE Trans. Commun. 2021, 69, 164–181. [Google Scholar] [CrossRef]
- Han, S.; Chen, Y.; Du, L.; Lv, J. ADMM-based Energy-Efficient Resource Allocation Method for Internet of Vehicles. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 3768–3773. [Google Scholar] [CrossRef]
- Oroojlooy, A.; Hajinezhad, D. A review of cooperative multi-agent deep reinforcement learning. Appl. Intell. 2023, 53, 13677–13722. [Google Scholar] [CrossRef]
- Jiang, K.; Zhou, H.; Zeng, D.; Wu, J. Multi-Agent Reinforcement Learning for Cooperative Edge Caching in Internet of Vehicles. In Proceedings of the 2020 IEEE 17th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Delhi, India, 10–13 December 2020; pp. 455–463. [Google Scholar] [CrossRef]
- Zhou, W.; Chen, D.; Yan, J.; Li, Z.; Yin, H.; Ge, W. Multi-agent reinforcement learning for cooperative lane changing of connected and autonomous vehicles in mixed traffic. Auton. Intell. Syst. 2022, 2, 5. [Google Scholar] [CrossRef]
- Wang, T.; Hussain, A.; Zhang, L.; Zhao, C. Collaborative Edge Computing for Social Internet of Vehicles to Alleviate Traffic Congestion. IEEE Trans. Comput. Soc. Syst. 2022, 9, 184–196. [Google Scholar] [CrossRef]
- Girelli Consolaro, N.; Shinde, S.S.; Naseh, D.; Tarchi, D. Analysis and Performance Evaluation of Transfer Learning Algorithms for 6G Wireless Networks. Electronics 2023, 12, 3327. [Google Scholar] [CrossRef]
- Wang, M.; Lin, Y.; Tian, Q.; Si, G. Transfer Learning Promotes 6G Wireless Communications: Recent Advances and Future Challenges. IEEE Trans. Reliab. 2021, 70, 790–807. [Google Scholar] [CrossRef]
- Chang, Z.; Liu, S.; Xiong, X.; Cai, Z.; Tu, G. A Survey of Recent Advances in Edge-Computing-Powered Artificial Intelligence of Things. IEEE Internet Things J. 2021, 8, 13849–13875. [Google Scholar] [CrossRef]
- Liu, L.; Yao, Y.; Wang, R.; Wu, B.; Shi, W. Equinox: A Road-Side Edge Computing Experimental Platform for CAVs. In Proceedings of the 2020 International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, 27–28 February 2020; pp. 41–42. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, L.; Zhang, X.; Shi, W. HydraOne: An Indoor Experimental Research and Education Platform for CAVs. In Proceedings of the 2nd USENIX Workshop on Hot Topics in Edge Computing (HotEdge 19), Renton, WA, USA, 9 July 2019. [Google Scholar]
- Wu, T.; Wang, Y.; Shi, W.; Lu, J. HydraMini: An FPGA-based Affordable Research and Education Platform for Autonomous Driving. In Proceedings of the 2020 International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, 27–28 February 2020; pp. 45–52. [Google Scholar] [CrossRef]
- Maheshwari, S.; Zhang, W.; Seskar, I.; Zhang, Y.; Raychaudhuri, D. EdgeDrive: Supporting Advanced Driver Assistance Systems using Mobile Edge Clouds Networks. In Proceedings of the IEEE INFOCOM 2019—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 29 April–2 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Villanueva, A.; Benemerito, R.L.L.; Cabug-Os, M.J.M.; Chua, R.B.; Rebeca, C.K.D.; Miranda, M. Somnolence Detection System Utilizing Deep Neural Network. In Proceedings of the 2019 International Conference on Information and Communications Technology (ICOIACT), Yogyakarta, Indonesia, 24–25 July 2019; pp. 602–607. [Google Scholar] [CrossRef]
- Tian, D.; Zhang, C.; Duan, X.; Wang, X. An Automatic Car Accident Detection Method Based on Cooperative Vehicle Infrastructure Systems. IEEE Access 2019, 7, 127453–127463. [Google Scholar] [CrossRef]
- Fu, Y.; Li, C.; Yu, F.R.; Luan, T.H.; Zhang, Y. A Survey of Driving Safety with Sensing, Vehicular Communications, and Artificial Intelligence-Based Collision Avoidance. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6142–6163. [Google Scholar] [CrossRef]
- Tufail, A.; Namoun, A.; Abi Sen, A.A.; Kim, K.H.; Alrehaili, A.; Ali, A. Moisture Computing-Based Internet of Vehicles (IoV) Architecture for Smart Cities. Sensors 2021, 21, 3785. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Zhu, K.; Hossain, E. Green Internet of Vehicles (IoV) in the 6G Era: Toward Sustainable Vehicular Communications and Networking. IEEE Trans. Green Commun. Netw. 2022, 6, 391–423. [Google Scholar] [CrossRef]
- Zhang, J.; Letaief, K.B. Mobile Edge Intelligence and Computing for the Internet of Vehicles. Proc. IEEE 2020, 108, 246–261. [Google Scholar] [CrossRef]
- Rafique, W.; Qi, L.; Yaqoob, I.; Imran, M.; Rasool, R.U.; Dou, W. Complementing IoT Services Through Software Defined Networking and Edge Computing: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2020, 22, 1761–1804. [Google Scholar] [CrossRef]
- Duan, W.; Gu, J.; Wen, M.; Zhang, G.; Ji, Y.; Mumtaz, S. Emerging Technologies for 5G-IoV Networks: Applications, Trends and Opportunities. IEEE Netw. 2020, 34, 283–289. [Google Scholar] [CrossRef]
- Balkus, S.V.; Wang, H.; Cornet, B.D.; Mahabal, C.; Ngo, H.; Fang, H. A Survey of Collaborative Machine Learning Using 5G Vehicular Communications. IEEE Commun. Surv. Tutor. 2022, 24, 1280–1303. [Google Scholar] [CrossRef]
- Dai, P.; Song, F.; Liu, K.; Dai, Y.; Zhou, P.; Guo, S. Edge Intelligence for Adaptive Multimedia Streaming in Heterogeneous Internet of Vehicles. IEEE Trans. Mob. Comput. 2023, 22, 1464–1478. [Google Scholar] [CrossRef]
- Khan Tayyaba, S.; Khattak, H.A.; Almogren, A.; Shah, M.A.; Ud Din, I.; Alkhalifa, I.; Guizani, M. 5G Vehicular Network Resource Management for Improving Radio Access through Machine Learning. IEEE Access 2020, 8, 6792–6800. [Google Scholar] [CrossRef]
- Shinde, S.S.; Bozorgchenani, A.; Tarchi, D.; Ni, Q. On the Design of Federated Learning in Latency and Energy Constrained Computation Offloading Operations in Vehicular Edge Computing Systems. IEEE Trans. Veh. Technol. 2022, 71, 2041–2057. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Learning Method | Advantages | Challenges | Conditions | KPIs |
|---|---|---|---|---|
Centralized Learning (CL)  |
|
|
|
|
Federated Learning (FL)  |
|
|
|
|
Collaborative Federated Learning (CFL) |
|
|
|
|
Group ADMM (GADMM) |
|
|
|
|
Federated Distillation (FD)  |
| Vulnerable to the problem of non-IID data distributions |
|
|
Split Learning (SL) |
|
|
|
|
Multiagent Reinforcement Learning (MARL) |
|
|
|
|
Transfer Learning (TL) |
|
|
|
|
| Integrated T/NTN Layer | Computation Resources (FLOPS) | Communication Resources (Mbps) | Storage Resources (GB) |
|---|---|---|---|
| VU | 10,000 | 20 | 10 |
| RSU | 30,000 | 40 | 30 |
| LAP | 30,000 | 30 | 10 |
| HAP | 50,000 | 50 | 50 |
| Satellite | 70,000 | 90 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naseh, D.; Shinde, S.S.; Tarchi, D. Network Sliced Distributed Learning-as-a-Service for Internet of Vehicles Applications in 6G Non-Terrestrial Network Scenarios. J. Sens. Actuator Netw. 2024, 13, 14. https://doi.org/10.3390/jsan13010014
Naseh D, Shinde SS, Tarchi D. Network Sliced Distributed Learning-as-a-Service for Internet of Vehicles Applications in 6G Non-Terrestrial Network Scenarios. Journal of Sensor and Actuator Networks. 2024; 13(1):14. https://doi.org/10.3390/jsan13010014
Chicago/Turabian StyleNaseh, David, Swapnil Sadashiv Shinde, and Daniele Tarchi. 2024. "Network Sliced Distributed Learning-as-a-Service for Internet of Vehicles Applications in 6G Non-Terrestrial Network Scenarios" Journal of Sensor and Actuator Networks 13, no. 1: 14. https://doi.org/10.3390/jsan13010014