
Remote Binaural System (RBS) for Noise Acoustic Monitoring
 , , , ,
, , , ,  and
and
Abstract
:1. Introduction
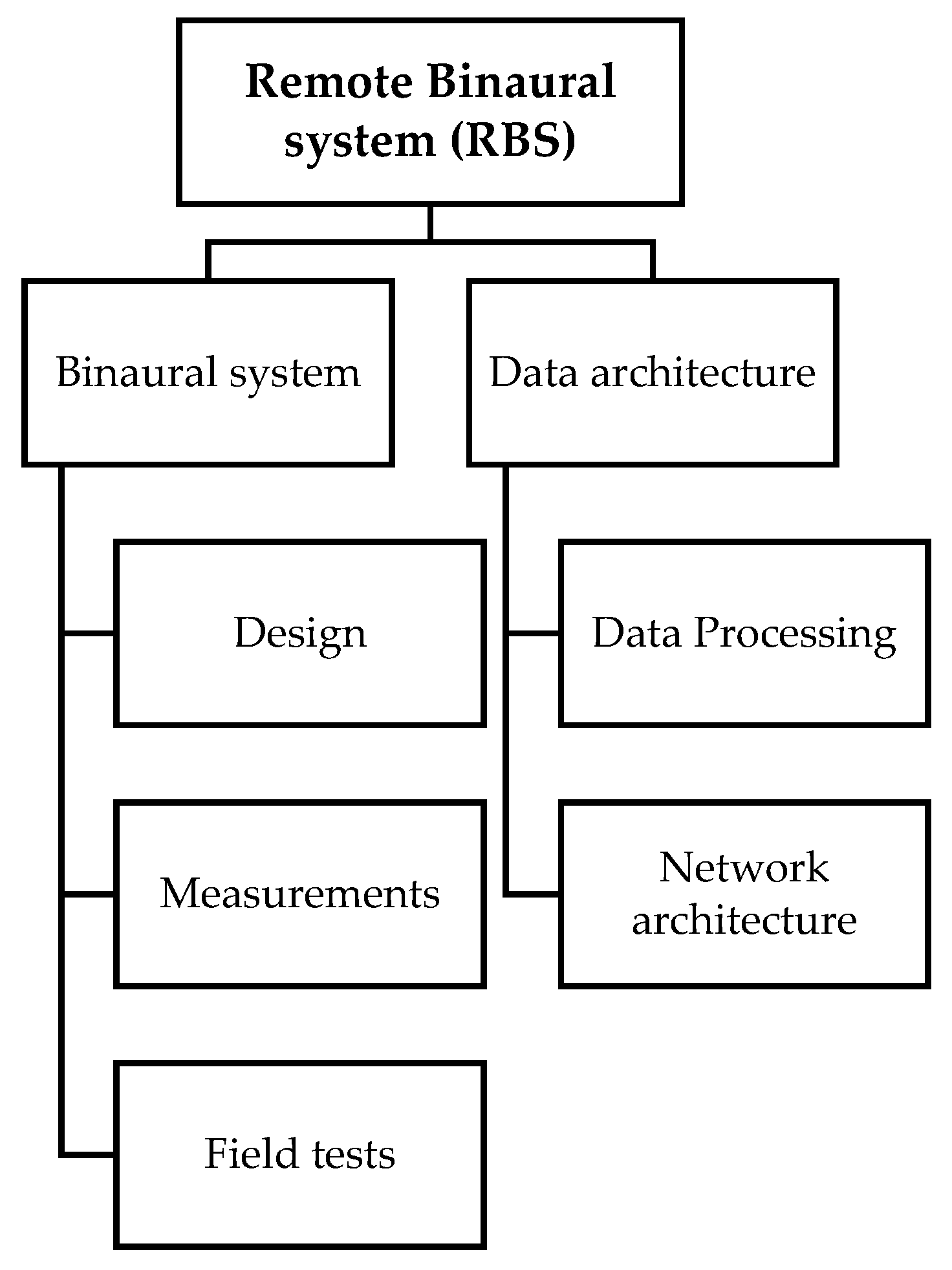
2. Materials and Methods
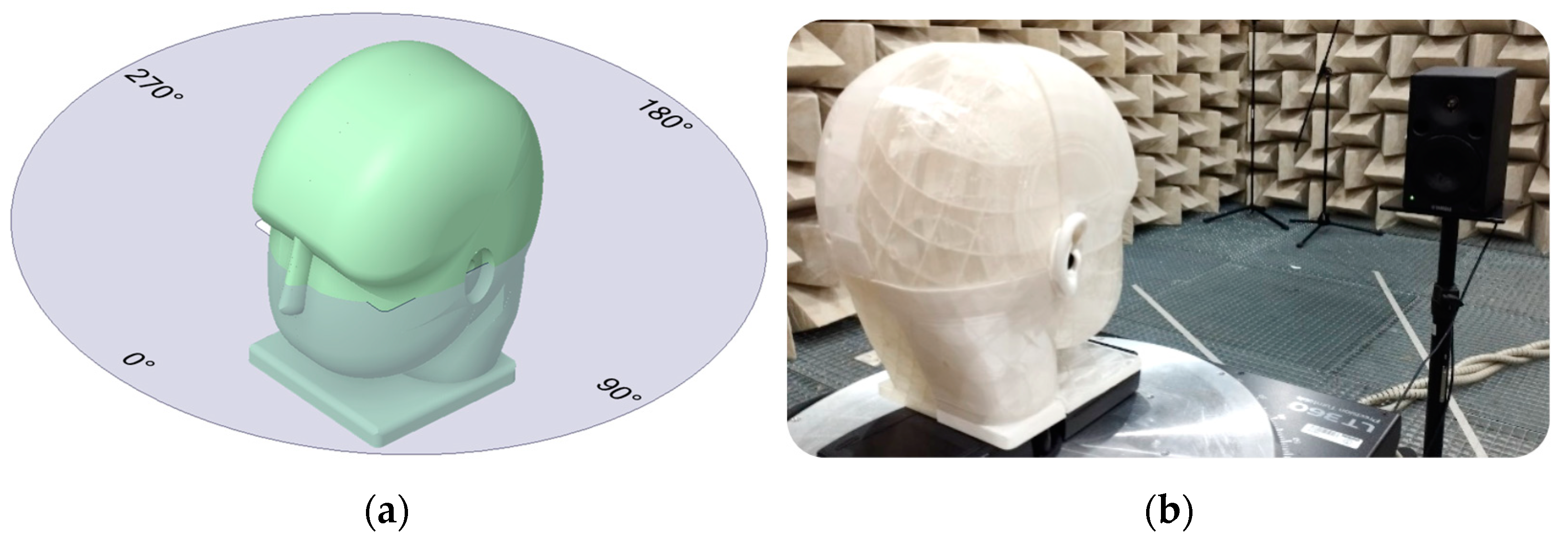
2.1. Artificial Head
2.1.1. Design
2.1.2. Anechoic Chamber Measurements
2.1.3. Field Measurements
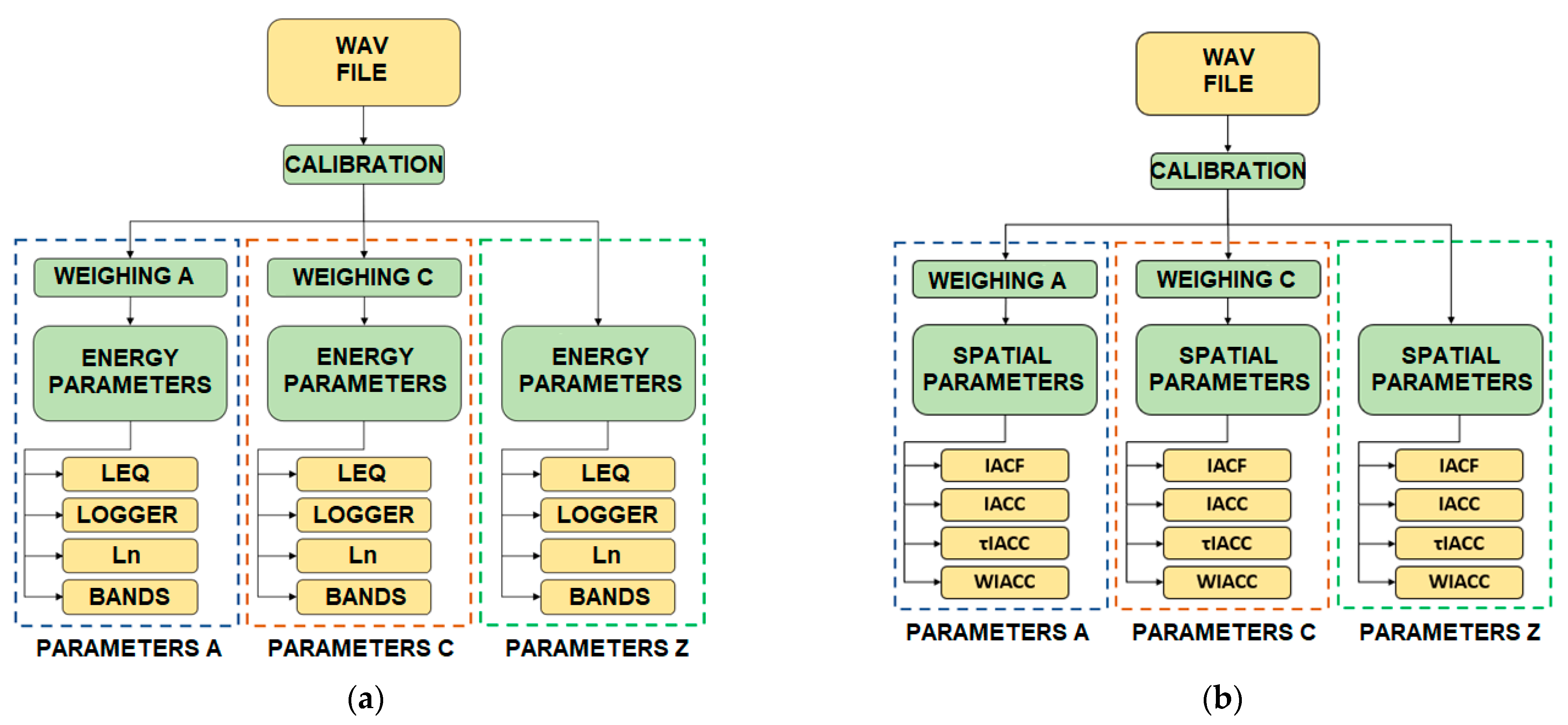
2.2. Data Processing
2.2.1. Acoustic Parameter Software
- Autocorrelation Function
- Interaural Cross-Correlation
2.2.2. Network Architecture for Cloud Storage and Processing
- One of the key benefits of using the event-driven architecture on AWS Beanstalk is the scalability it provides. We can easily increase the number of worker agents taking messages from the SQS service to handle additional loads as needed.
- If a new algorithm is developed in the future, it can be integrated into the system without major changes to the overall architecture by adding a new Beanstalk agent and including a new subscriber to the SNS service, allowing for efficient and flexible updates.
- AWS Beanstalk allows for vertical scalability, meaning that if any of the current or future algorithms used for processing require more computing resources, we can easily increase the resources at any time.
- The results from the algorithms are stored in JSON format in the “soundmonitor-NoiseLevel” and “soundmonitor-NoiseType” S3 buckets, enabling the integration between multiple AWS services, such as AWS Quicksight, for visualization purposes.
3. Results and Discussion
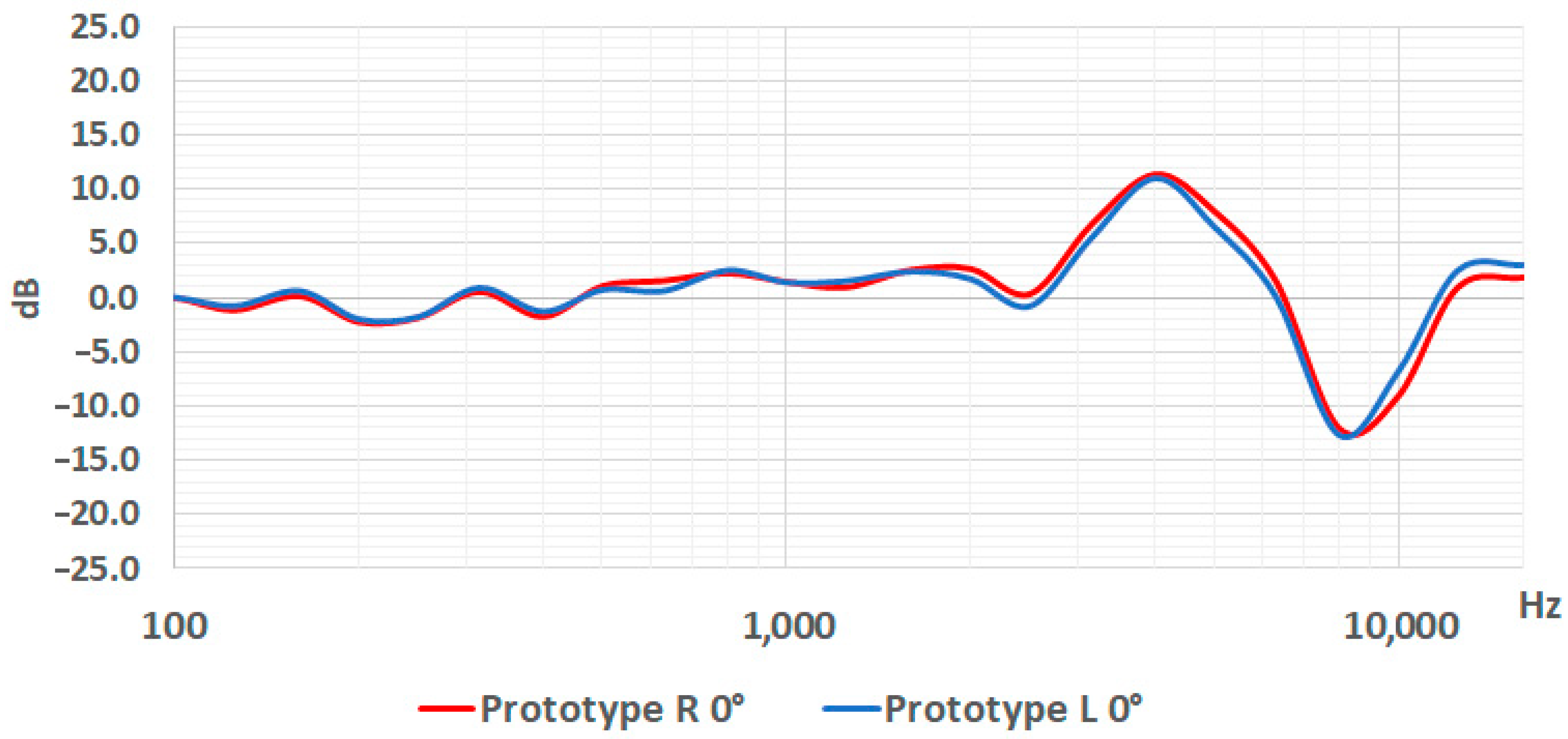
3.1. Anechoic Chamber
3.2. Field Measurements
3.2.1. Energetic Parameters
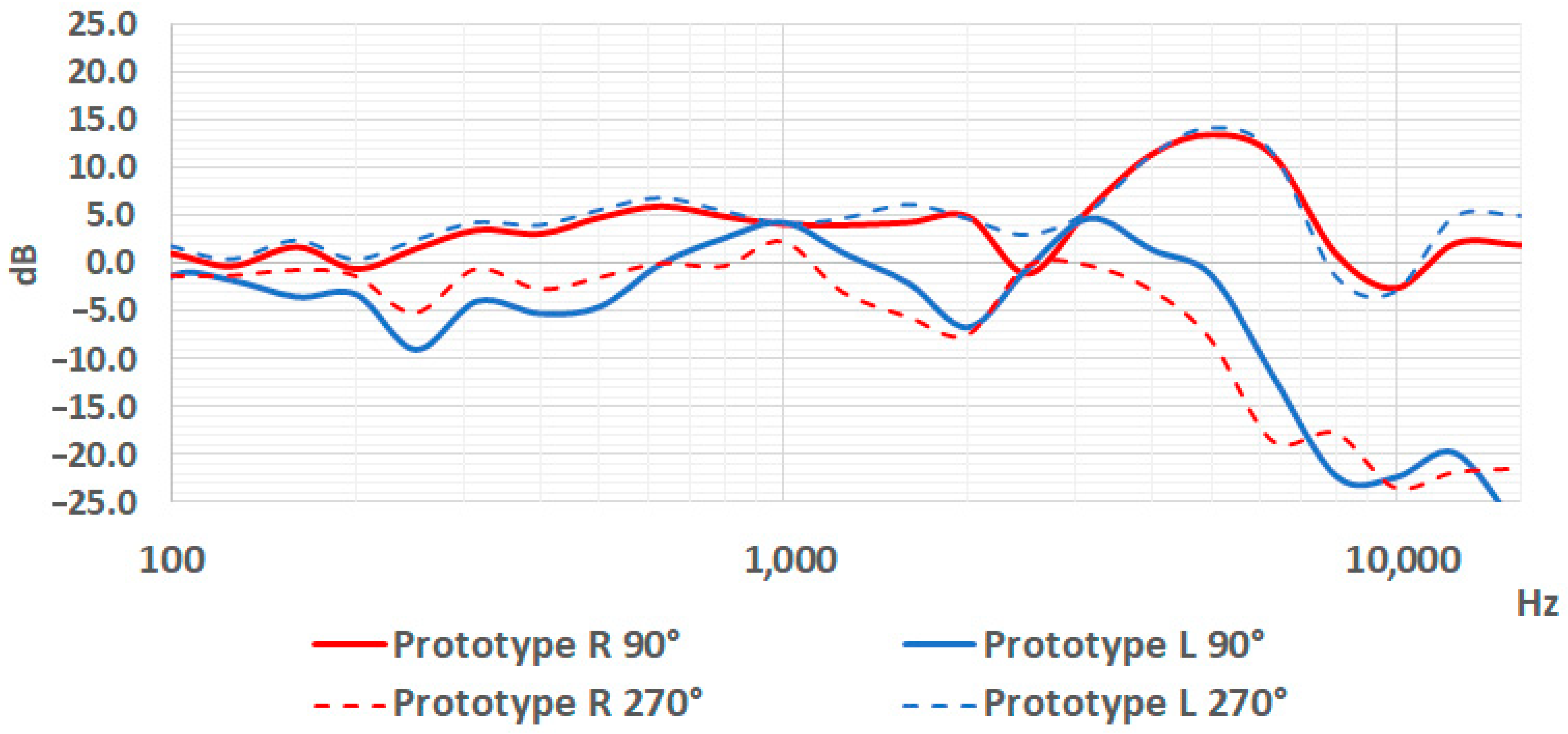
3.2.2. Spatial Parameters
4. Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Department of Economic and Social Affairs. Population 2030: Demographic Challenges and Opportunities for Sustainable Development Planning; United Nations: New York, NY, USA, 2015; Volume 58.
- Clark, C. Systematic Review of Evidence on the Effect of Environmental Noise on Quality of Life, Wellbeing and Mental Health. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Hamburg, Germany, 21–24 August 2016; Volume 253, pp. 3835–3841. [Google Scholar]
- Ouis, D. Annoyance from Road Traffic Noise: A Review. J. Environ. Psychol. 2001, 21, 101–120. [Google Scholar] [CrossRef]
- Starke, K.R.; Schubert, M.; Kaboth, P.; Gerlach, J.; Hegewald, J.; Reusche, M.; Friedemann, D.; Zülke, A.; Riedel-Heller, S.G.; Zeeb, H.; et al. Traffic Noise Annoyance in the LIFE-Adult Study in Germany: Exposure-Response Relationships and a Comparison to the WHO Curves. Environ. Res. 2023, 228, 115815. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.; Masullo, M. Combining Binaural Psychoacoustic Characteristics for Emotional Evaluations of Acoustic Environments. Appl. Acoust. 2023, 210, 109433. [Google Scholar] [CrossRef]
- Sun, K.; De Coensel, B.; Filipan, K.; Aletta, F.; Van Renterghem, T.; De Pessemier, T.; Joseph, W.; Botteldooren, D. Classification of Soundscapes of Urban Public Open Spaces. Landsc. Urban Plan. 2019, 189, 139–155. [Google Scholar] [CrossRef] [Green Version]
- Schulte-Fortkamp, B. Soundscape, Standardization, and Application. In Proceedings of the Euronoise 2018-Conference proceedings, Crete, Greece, 27–31 May 2018; pp. 2445–2450. [Google Scholar]
- Jeon, J.Y.; Hong, J.Y. Classification of Urban Park Soundscapes through Perceptions of the Acoustical Environments. Landsc. Urban Plan. 2015, 141, 100–111. [Google Scholar] [CrossRef]
- Jo, H.I.; Jeon, J.Y. Urban Soundscape Categorization Based on Individual Recognition, Perception, and Assessment of Sound Environments. Landsc. Urban Plan. 2021, 216, 104241. [Google Scholar] [CrossRef]
- Brown, A.L. Soundscape Planning as a Complement to Environmental Noise Management. In INTER-NOISE and NOISE-CON Congress and Conference Proceedings; Institute of Noise Control Engineering: Reston, VA, USA, 2014; Volume 249, pp. 5894–5903. [Google Scholar]
- Lavia, L.; Dixon, M.; Witchel, H.J.; Goldsmith, M. Applied Soundscape Practices. Soundscape Built Environ. 2016, 10, 243–301. [Google Scholar]
- Blauert, J.; Jekosch, U. Sound-Quality Evaluation—A Multi-Layered Problem. Acta Acust. United Acust. 1997, 83, 747–753. [Google Scholar]
- I.S.O. 12913-1: 2014; Acoustics—Soundscape Part 1: Definition and Conceptual Framework. ISO: Geneva, Switzerland, 2014.
- Genuit, K. A Special Calibratable Artificial-Head-Measurement-System for Subjective and Objective Classification of Noise. In Proceedings of the 1986 international conference on noise control engineering, Cambridge, MA, USA, 21–23 July 1986; pp. 1313–1318. [Google Scholar]
- Daniel, P.; Fastl, H.; Fedtke, T.; Genuit, K.; Grabsch, H.-P.; Niederdränk, T.; Schmitz, A.; Vorländer, M.; Zollner, M. Kunstkopftechnik-Eine Bestandsaufnahme. In Proceedings of the ACUSTProc. International Congress on Acoustics ICA/Acta Acustica/Nuntius Acusticus, Madrid, Spain, 2–7 September 2007; Volume 93, p. 58. [Google Scholar]
- ASA—ANSI/ASA S3.19; Method for the Measurement of Real-Ear Protection of Hearing Protectors and Physical Attenuation of Earmuffs. Acoustical Society of America: Melville, NY, USA, 1974.
- Liu, X.; Song, H.; Zhong, X. A Hybrid Algorithm for Predicting Median-Plane Head-Related Transfer Functions from Anthropometric Measurements. Appl. Sci. 2019, 9, 2323. [Google Scholar] [CrossRef] [Green Version]
- Schmitz, A. Ein Neues Digitales Kunstkopfmeßsystem. Acta Acust. United Acust. 1995, 81, 416–420. [Google Scholar]
- Minnaar, P.; Olesen, S.K.; Christensen, F.; Møller, H. Localization with Binaural Recordings from Artificial and Human Heads. J. Audio Eng. Soc. 2001, 49, 323–336. [Google Scholar]
- Noriega-Linares, J.E.; Rodriguez-Mayol, A.; Cobos, M.; Segura-Garcia, J.; Felici-Castell, S.; Navarro, J.M. A Wireless Acoustic Array System for Binaural Loudness Evaluation in Cities. IEEE Sens. J. 2017, 17, 7043–7052. [Google Scholar] [CrossRef]
- Segura-Garcia, J.; Navarro-Ruiz, J.M.; Perez-Solano, J.J.; Montoya-Belmonte, J.; Felici-Castell, S.; Cobos, M.; Torres-Aranda, A.M. Spatio-Temporal Analysis of Urban Acoustic Environments with Binaural Psycho-Acoustical Considerations for IoT-Based Applications. Sensors 2018, 18, 690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- IEC 60318; Electroacoustics—Simulators of Human Head and Ear—Part 8: Acoustic Coupler for High-Frequency Measurements of Hearing Aids and Earphones Coupled to the Ear by Means of Ear Inserts. International Electrotechnical Commission: Geneva, Switzerland, 2022.
- IEC 61672-1; Electroacoustics—Sound Level Meters—Part 1: Specifications. International Electrotechnical Commission: Geneva, Switzerland, 2013.
- O’Connor, D.; Kennedy, J. An Evaluation of 3D Printing for the Manufacture of a Binaural Recording Device. Appl. Acoust. 2021, 171, 107610. [Google Scholar] [CrossRef]
- Snaidero, T.; Jacobsen, F.; Buchholz, J. Measuring HRTFs of Brüel & Kjær Type 4128-C, GRAS KEMAR Type 45BM, and Head Acoustics HMS II. 3 Head and Torso Simulators; Technical University of Denmark, Department of Electrical Engineering: Lyngby, Denmark, 2011. [Google Scholar]
- 3Dio 3Dio. Available online: https://3diosound.com/ (accessed on 31 July 2023).
- IEC 60318-7; Electroacoustics—Simulators of Human Head and Ear—Part 7: Head and Torso Simulator for the Measurement of Sound Sources Close to the Ear. International Electrotechnical Commission: Geneva, Switzerland, 2022.
- Blauert, J. The Technology of Binaural Listening; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Fujii, K.; Soeta, Y.; Ando, Y. Acoustical Properties of Aircraft Noise Measured by Temporal and Spatial Factors. J. Sound Vib. 2001, 241, 69–78. [Google Scholar] [CrossRef]
- Ando, Y.; Cariani, P. Auditory and Visual Sensations; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Michelson, B.M. Event-Driven Architecture Overview; Patricia Seybold Group: Boston, MA, USA, 2006. [Google Scholar]
- Wang, D.; Brown, G.J. Computational Auditory Scene Analysis: Principles, Algorithms, and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 2006. [Google Scholar]
- Soeta, Y.; Ando, Y. Neurally Based Measurement and Evaluation of Environmental Noise; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurements | Differences | ||||
|---|---|---|---|---|---|
| SVAN 977 | RBS L | RBS R | RBS L SVAN | RBS R SVAN | |
| Leq A | 68.1 | 71.3 | 71.8 | 3.2 | 3.7 |
| Leq C | 79.1 | 81.6 | 82.5 | 2.5 | 3.4 |
| Leq Z | 82.0 | 83.1 | 84.1 | 1.1 | 2.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Acosta, O.; Hermida, L.; Herrera, M.; Montenegro, C.; Gaona, E.; Bejarano, M.; Gordillo, K.; Pavón, I.; Asensio, C. Remote Binaural System (RBS) for Noise Acoustic Monitoring. J. Sens. Actuator Netw. 2023, 12, 63. https://doi.org/10.3390/jsan12040063
Acosta O, Hermida L, Herrera M, Montenegro C, Gaona E, Bejarano M, Gordillo K, Pavón I, Asensio C. Remote Binaural System (RBS) for Noise Acoustic Monitoring. Journal of Sensor and Actuator Networks. 2023; 12(4):63. https://doi.org/10.3390/jsan12040063
Chicago/Turabian StyleAcosta, Oscar, Luis Hermida, Marcelo Herrera, Carlos Montenegro, Elvis Gaona, Mateo Bejarano, Kevin Gordillo, Ignacio Pavón, and Cesar Asensio. 2023. "Remote Binaural System (RBS) for Noise Acoustic Monitoring" Journal of Sensor and Actuator Networks 12, no. 4: 63. https://doi.org/10.3390/jsan12040063