Bicycle Level of Service for Route Choice—A GIS Evaluation of Four Existing Indicators with Empirical Data


Abstract
:
1. Introduction
2. Background
2.1. Sixth Edition Highway Capacity Manual BLOS (HCM6)
2.2. Bicycle Compatibility Index (BCI)
- BL = presence of a bicycle lane or paved shoulder > 3.0 ft no = 0 yes = 1
- BLW = bicycle lane width in feet (to the nearest tenth)
- CLW = curb lane width in feet (to the nearest tenth)
- CLV = curb lane vehicles per hour in the travel direction
- OLV = other lane(s) volume in travel direction
- SPD = 85th percentile vehicle speeds miles/h
- PKG = presence of a parking lane with more than 30 percent occupancy; no = 0, yes = 1
- AREA = type of roadside development; residential = 1 other type = 0
- AF = adjustment factor for truck volumes, parking turnover and right-turn volumes
2.3. Level of Traffic Stress (LTS)
2.4. Bicycle Stress Level (BSL)
3. Methods
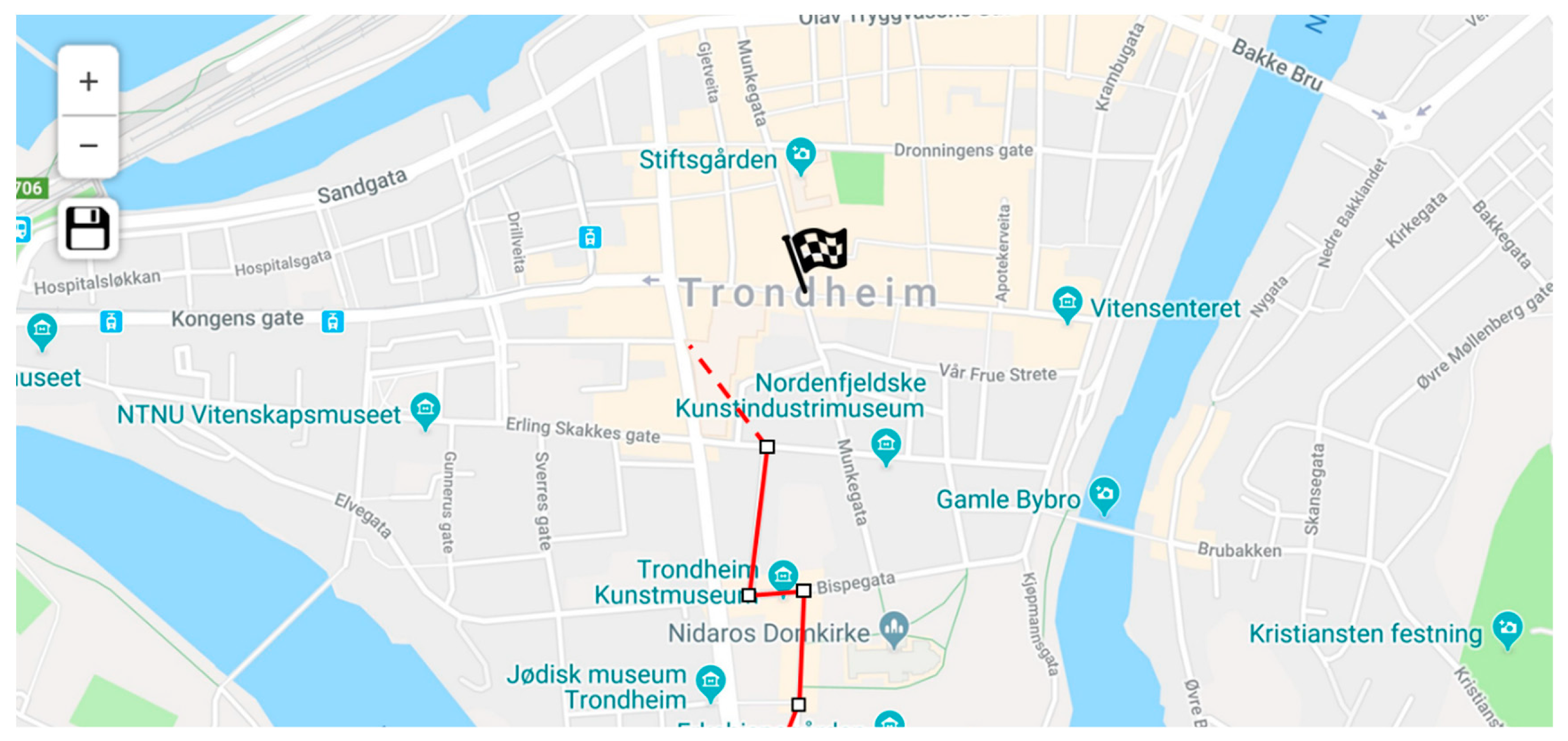
3.1. Survey and Mapping API
3.2. Network Information
3.3. Data Preparation
3.4. Network Impedance Based on BLOS
3.5. Detour Rate
3.6. Route Choice Generation and Evaluation with Empirical Data
- Collect necessary transport and land use GIS parameters in the area of interest from existing data sources (see Table 2) or field data.
- Combine the necessary parameters to produce the BLOS index value for each link in the transport network area using GIS attribute tables.
- Create a range of plausible detour rates and corresponding impedance factors (for different BLOS levels) from the shortest path (e.g., 0 to 50% in this paper). See example in Table 4 for LTS.
- Create a new parameter for each link ‘perceived link length’ by multiplying the link length with the impedance factors from step 3.
- Create a new parameter ‘perceived intersection length’ for intersections with three or more links and variability in BLOS amongst links (see lookup example in Table 5 for LTS).
- Combine the two components for each link to produce a new parameter ‘perceived length’. This is the sum of ‘perceived link length’ and the relevant ‘perceived intersection length’ lookup value for cases in which the link intersects another link with a lower (poorer standard) BLOS.
- Calculate a new parameter ‘perceived travel time’ using ‘perceived length’ and the underlying topography (in this study, performed using Network Analyst in ArcGIS). For this paper, travel time is dependent on cycling speed which is a direct function of link gradient the Norwegian Area and Transport Planning (ATP) model.The ATP model is an ArcGIS extension which performs a variety of functions and includes a simple speed model for different gradients. On slopes with a gradient of −10% or more (downhill), a maximum speed of 40 kph is used. Similarly, above 8% gradient (uphill), a constant speed of 3 kph is used. On level ground, cyclists are assumed to cycle at 16 kph. Speed is linearly decreased as the gradient increases from 0 to 8% and is linearly increased when the (downhill) gradient approaches −10% (from 0% gradient). Note that the original link gradient is assumed to apply to the ‘perceived length’.
- Now, for each OD pair and detour combination, find the optimal route which minimises the perceived travel time (these are hereafter called generated routes). Since there are 11 different detour rates iterated in this example, each OD pair will have 11 (not necessarily unique) generated routes.
- For each OD pair, find the degree of overlap between the empirical map-matched routes and the generated routes. Since there are very few empirical routes that use the entirety of the generated route, we can measure instead the number of cyclists on each link of the shortest path to give a ‘length-weighted’ number of cyclists on a generated route according to the numbers of cyclists found to use its component links. This is described using the notation in step 10.
- Say that there are n unique generated routes of interest R1,…,Rn. For each j ∈ {1,…,n} we have mj links, and the lengths of these links are denoted by L1,j, L2,j,…,. The total length of the jth route would then be . Now let Ci be the number of cyclists recorded on link i. Then the number of ‘weighted cyclists’ (denoted by Wi) on link i within route j is therefore .The percentage of cyclists on a specific generated route is then the sum of weighted cyclists along that route’s component links divided by the total number of participant-drawn routes (which we know from Section 3.3 to be 467) as given by Equation (3)
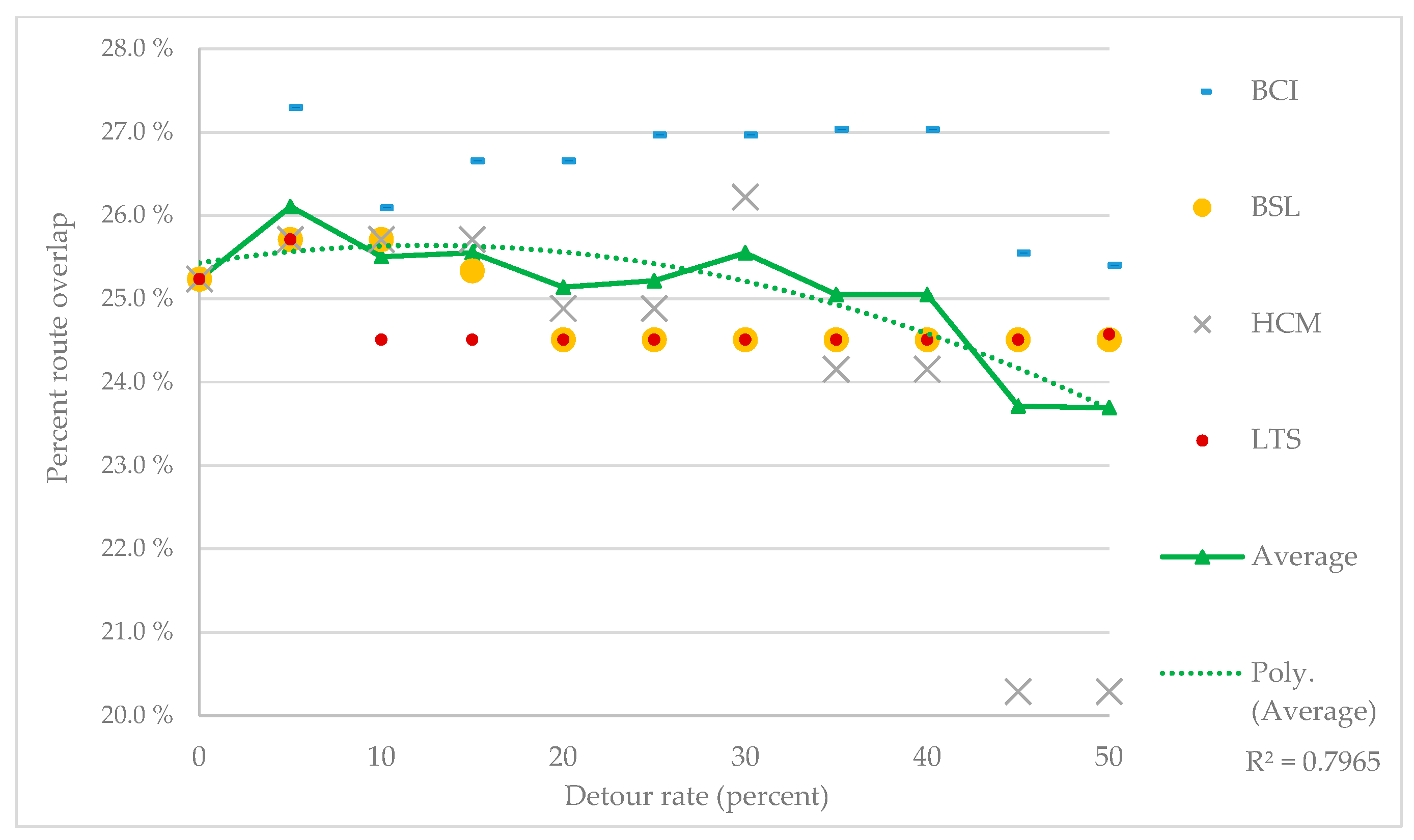
- Plot the percentage cyclists on each generated route Rj against the iterated detour rates (on the x-axis. The optimal value (highest percentage match on the y-axis) provides an empirical indicator of willingness to deviate from the shortest path to use high-quality infrastructure (in terms of bicycle suitability in relation to surrounding options).
4. Results
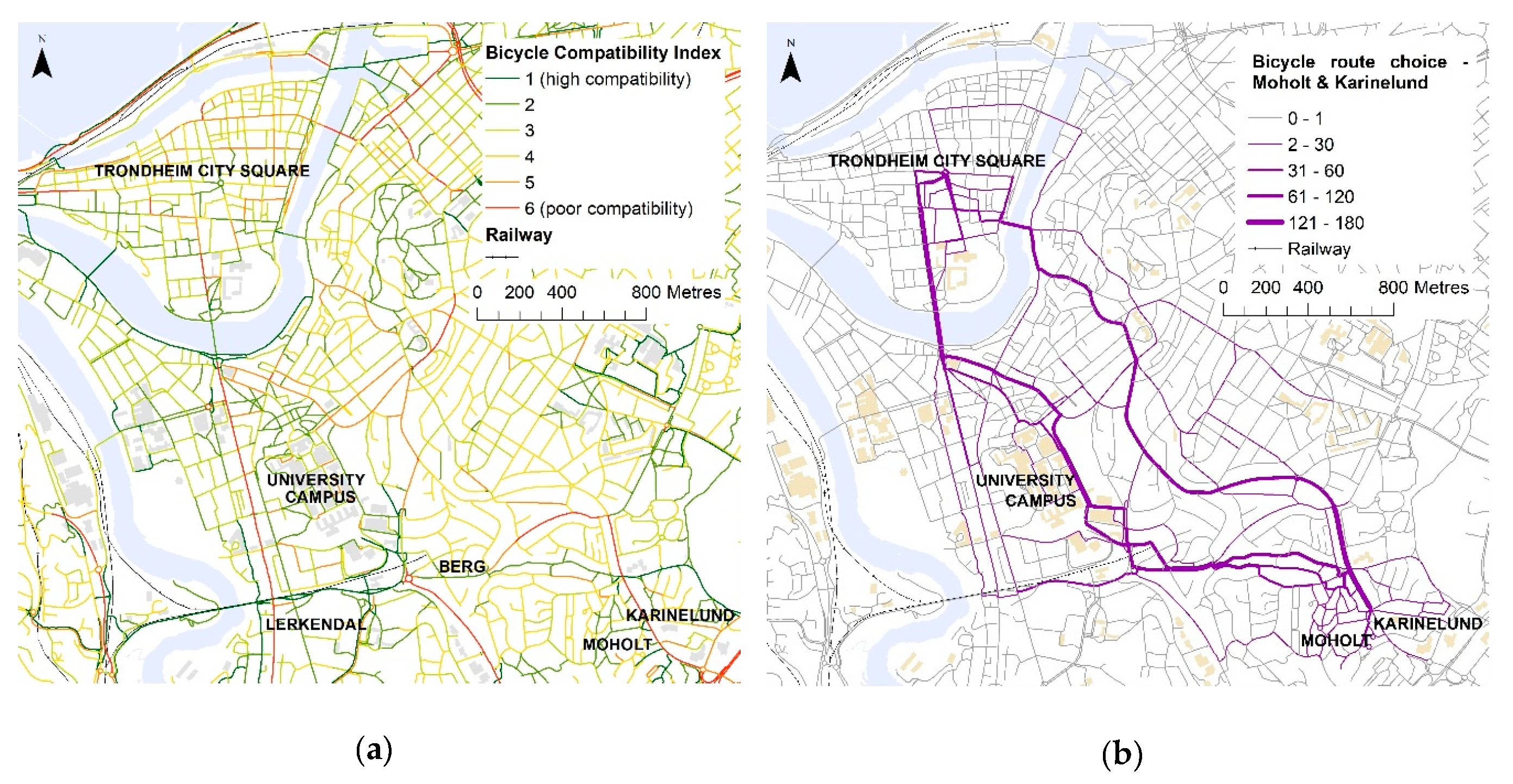
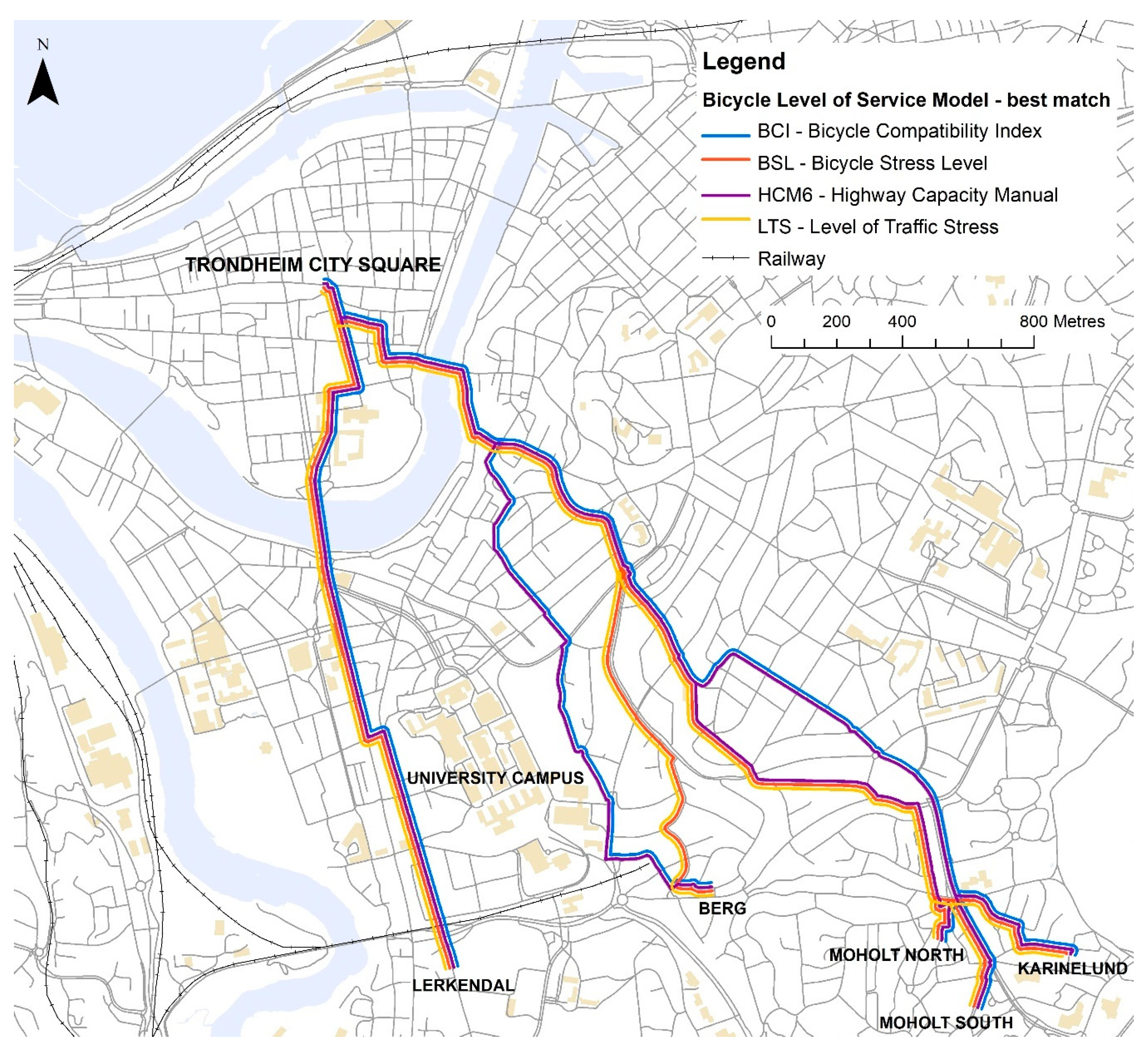
4.1. BLOS Map Creation and Empirical Route Choices
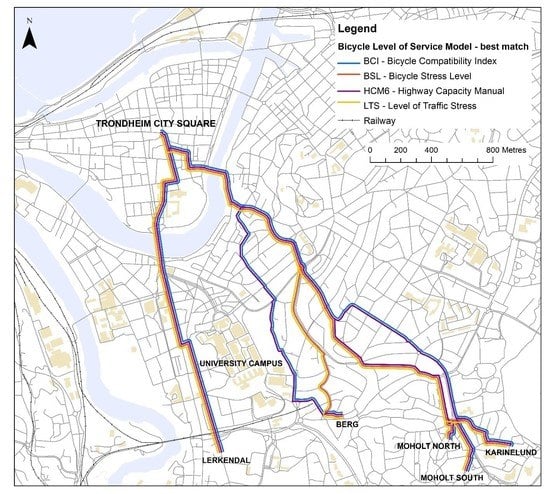
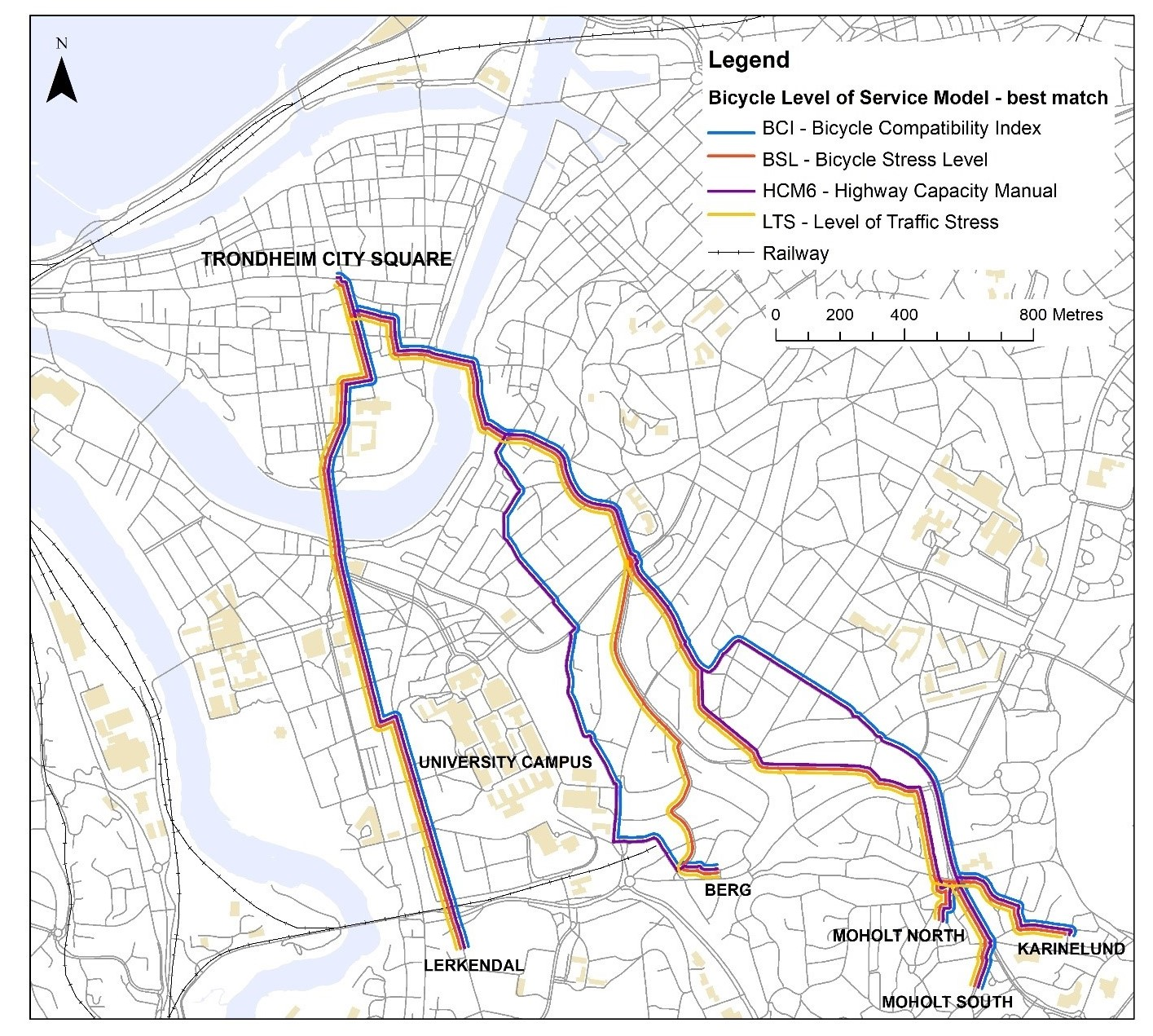
4.2. Route Generation
4.3. BLOS Model Comparison
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Macmillan, A.; Connor, J.; Witten, K.; Kearns, R.; Rees, D.; Woodward, A. The Societal Costs and Benefits of Commuter Bicycling: Simulating the Effects of Specific Policies Using System Dynamics Modeling. Environ. Heal. Perspect. 2014, 122, 335–344. [Google Scholar] [CrossRef] [PubMed]
- Harms, L.; Bertolini, L.; Brömmelstroet, M.T. Spatial and social variations in cycling patterns in a mature cycling country exploring differences and trends. J. Transp. Heal. 2014, 1, 232–242. [Google Scholar] [CrossRef]
- Ewing, R.; Cervero, R. Travel and the Built Environment. A Meta-Analysis. J. Am. Plan. Assoc. 2010, 76, 265–294. [Google Scholar] [CrossRef]
- Piatkowski, D.P.; Marshall, W.E.; Krizek, K.J. Carrots versus Sticks: Assessing Intervention Effectiveness and Implementation Challenges for Active Transport. J. Plan. Educ. Res. 2019, 39, 50–64. [Google Scholar] [CrossRef]
- Næss, P.; Andersen, J.; Nicolaisen, M.S.; Strand, A. Transport modeling in the context of the ‘predict and provide’ paradigm. Eur. J. Transp. Infrastruct. Res. 2014, 14, 102–121. [Google Scholar]
- Madsen, T. Transport cycling behavior: Associations between the built environment and transport cycling in Denmark. Ph.D. Thesis, University of Southern Denmark, Odense, Denmark, 2013. Available online: https://findresearcher.sdu.dk:8443/ws/files/88330090/PhD_thesis_tryk_Thomas_Madsen_final.pdf (accessed on 20 May 2019).
- Callister, D.; Lowry, M. Tools and Strategies for Wide-Scale Bicycle Level-of-Service Analysis. J. Urban Plan. Dev. 2013, 139, 250–257. [Google Scholar] [CrossRef]
- Dowling, R.; Reinke, D.; Flannery, A.; Ryus, P.; Vandehey, M.; Petritsch, T.; Landis, B.; Rouphail, N.; Bonneson, J. Multimodal Level of Service for Urban Streets; NCHRP Report 616; Transportation Research Board: Washington, DC, USA, 2008. [Google Scholar]
- Main Roads Western Australia Guidelines for Assessing Cycling Level of Service. Perth, Australia, 2006. Available online: https://www.mainroads.wa.gov.au/Documents/los_guidelines_cycling.RCN-D06%5E2347971.PDF (accessed on 20 May 2019).
- Landis, B.W.; Vattikuti, V.R.; Brannick, M.T. Real-Time Human Perceptions: Toward a Bicycle Level of Service. Transp. Res. Rec. J. Transp. Res. Board 1997, 1578, 119–126. [Google Scholar] [CrossRef]
- Nielsen, T.A.S.; Skov-Petersen, H. Bikeability—Urban structures supporting cycling. Effects of local, urban and regional scale urban form factors on cycling from home and workplace locations in Denmark. J. Transp. Geogr. 2018, 69, 36–44. [Google Scholar] [CrossRef]
- Winters, M.; Brauer, M.; Setton, E.M.; Teschke, K. Mapping bikeability: A spatial tool to support sustainable travel. Environ. Plan. B Plan. Des. 2013, 40, 865–883. [Google Scholar] [CrossRef]
- Krenn, P.J.; Oja, P.; Titze, S. Development of a Bikeability Index to Assess the Bicycle-Friendliness of Urban Environments. Open J. Civ. Eng. 2015, 5, 451–459. [Google Scholar] [CrossRef]
- Lowry, M.B.; Callister, D.; Gresham, M.; Moore, B. Assessment of Communitywide Bikeability with Bicycle Level of Service. Transp. Res. Rec. J. Transp. Res. Board 2012, 2314, 41–48. [Google Scholar] [CrossRef]
- Moudon, A.V.; Lee, C. Walking and Bicycling: An Evaluation of Environmental Audit Instruments. Am. J. Heal. Promot. 2003, 18, 21–37. [Google Scholar] [CrossRef]
- Asadi-Shekari, Z.; Moeinaddini, M.; Shah, M.Z. Non-motorised Level of Service: Addressing Challenges in Pedestrian and Bicycle Level of Service. Transp. Rev. 2013, 33, 166–194. [Google Scholar] [CrossRef]
- Parks, J.; Tanaka, A.; Ryus, P.; Monsere, C.M.; McNeil, N.; Goodno, M. Assessment of Three Alternative Bicycle Infrastructure Quality-of-Service Metrics. Transp. Res. Rec. J. Transp. Res. Board 2013, 2387, 56–65. [Google Scholar] [CrossRef]
- Jensen, S.U. Pedestrian and Bicycle Level of Service at Intersections, Roundabouts, and Other Crossings. In Proceedings of the 92nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2013; pp. 1–19. [Google Scholar]
- Botma, H. Method to Determine Level of Service for Bicycle Paths and Pedestrian-Bicycle Paths. Transp. Res. Rec. J. Transp. Res. Board 1995. [Google Scholar]
- Kang, K.; Lee, K. Development of a bicycle level of service model from the user’s perspective. KSCE J. Civ. Eng. 2012, 16, 1032–1039. [Google Scholar] [CrossRef]
- Petritsch, T.A.; Ozkul, S.; McLeod, P.; Landis, B.; McLeod, D. Quantifying Bicyclists’ Perceptions of Shared-Use Paths Adjacent to the Roadway. Transp. Res. Rec. J. Transp. Res. Board 2010, 2198, 124–132. [Google Scholar] [CrossRef]
- Jones, E.G.; Carlson, T.D. Development of Bicycle Compatibility Index for Rural Roads in Nebraska. Transp. Res. Rec. J. Transp. Res. Board. 2003, 1828, 124–132. [Google Scholar] [CrossRef]
- Noël, N.; Leclerc, C.; Lee-Gosselin, M. CRC index: Compatibility of Roads for Cyclists in Rural and Urban Fringe Areas. In Proceedings of the 82nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 12–16 January 2003; pp. 1–20. [Google Scholar]
- Petritsch, T.A.; Landis, B.W.; Huang, H.F.; McLeod, P.S.; Lamb, D.; Farah, W.; Guttenplan, M. Bicycle Level of Service for Arterials. Transp. Res. Rec. J. Transp. Res. Board 2007, 2031, 34–42. [Google Scholar] [CrossRef]
- Foster, N.; Monsere, C.M.; Dill, J.; Clifton, K. Level-of-Service Model for Protected Bike Lanes. Transp. Res. Rec. J. Transp. Res. Board 2015, 2520, 90–99. [Google Scholar] [CrossRef]
- Bai, L.; Liu, P.; Chan, C.-Y.; Li, Z. Estimating level of service of mid-block bicycle lanes considering mixed traffic flow. Transp. Res. Part A Policy Pract. 2017, 101, 203–217. [Google Scholar] [CrossRef]
- Beynon, R.; Golding-Williams, K.; Jones, P.; Mayo, A.; Russell, T.; Peck, C.; Thomas, C. Design Guidance: Active Travel (Wales) Act 2013. 2014. Available online: https://gov.wales/sites/default/files/publications/2017-09/active-travel-design-guidance.pdf (accessed on 20 May 2019).
- Transport for London. London Cycling Design Standards Consultation Draft—Tools and Techniques. 2014. Available online: https://consultations.tfl.gov.uk/cycling/draft-london-cycling-design-standards/user_uploads/draft-lcds---all-chapters.pdf (accessed on 20 May 2019).
- Dixon, L. Bicycle and Pedestrian Level-of-Service Performance Measures and Standards for Congestion Management Systems. Transp. Res. Rec. J. Transp. Res. Board 1996, 1538, 1–9. [Google Scholar] [CrossRef]
- Zhang, Y.; Brussel, M.; van den Bosch, F.; Grigolon, A.; Van Maarseveen, M. A GIS based Bicycle Level of Service route model. In Proceedings of the 13th International Conference on Design & Decision Support Systems in Architecture and Urban Planning, Eindhoven, The Netherlands, 27–28 June 2016. [Google Scholar]
- Mekuria, M.; Furth, P.; Nixon, H. MTI Report 11-19. Low-Stress Bicycling and Network Connectivity. Mineta Transportation Institute 2012. Available online: http://transweb.sjsu.edu/sites/default/files/1005-low-stress-bicycling-network-connectivity.pdf (accessed on 20 May 2019).
- Majumdar, B.B.; Mitra, S. Development of Level of Service Criteria for Evaluation of Bicycle Suitability. J. Urban Plan. Dev. 2018, 144, 04018012. [Google Scholar] [CrossRef]
- Epperson, B. Evaluating Suitability of Roadways for Bicycle Use: Toward a Cycling Level-of-Service Standard. Transp. Res. Rec. J. Transp. Res. Board 1994, 1438, 9–16. [Google Scholar]
- Sorton, A.; Walsh, T. Bicycle Stress Level As a Tool To Evaluate Urban and Suburban Bicycle Compatibility. Transp. Res. Rec. J. Transp. Res. Board 1994, 1438, 17–24. [Google Scholar]
- Landis, B.W. Bicycle Interaction Hazard Score: a Theoretical Model. Transp. Res. Rec. J. Transp. Res. Board 1994, 1438, 3–8. [Google Scholar]
- Turner, S.M.; Shafer, C.S.; Stewart, W.P. Bicycle suitability criteria for state roadways in Texas. Research report TX-97/3988-S; 1997. Available online: http://rosap.ntl.bts.gov/view/dot/33867/dot_33867_DS1.pdf (accessed on 20 May 2019).
- Harkey, D.L.; Reinfurt, D.W.; Knuiman, M. Development of the Bicycle Compatibility Index. Transp. Res. Rec. J. Transp. Res. Board 1998, 1636, 13–20. [Google Scholar] [CrossRef]
- Jensen, S.U. Pedestrian and Bicyclist Level of Service on Roadway Segments. Transp. Res. Rec. J. Transp. Res. Board 2007, 2031, 43–51. [Google Scholar] [CrossRef]
- Transportation Research Board Chapter 18 Urban Street Segments. In Highway Capacity Manual: A Guide for Multimodal Mobility Analysis; Transportation Research Board of the National Academies: Washington, DC, USA, 2016; ISBN 978-0-309-44148-3.
- Furth, P.G.; Putta, T.V.; Moser, P. Measuring low-stress connectivity in terms of bike-accessible jobs and potential bike-to-work trips: A case study evaluating alternative bike route alignments in northern Delaware. J. Transp. Land Use 2018, 11, 815–831. [Google Scholar] [CrossRef]
- Beura, S.K.; Manusha, V.L.; Chellapilla, H.; Bhuyan, P.K. Defining Bicycle Levels of Service Criteria Using Levenberg–Marquardt and Self-organizing Map Algorithms. Transp. Dev. Econ. 2018, 4, 11. [Google Scholar] [CrossRef]
- Ton, D.; Duives, D.; Cats, O.; Hoogendoorn, S. Evaluating a data-driven approach for choice set identification using GPS bicycle route choice data from Amsterdam. Travel Behav. Soc. 2018, 13, 105–117. [Google Scholar] [CrossRef]
- Broach, J.; Gliebe, J.; Dill, J. Calibrated Labeling Method for Generating Bicyclist Route Choice Sets Incorporating Unbiased Attribute Variation. Transp. Res. Rec. J. Transp. Res. Board 2010, 2197, 89–97. [Google Scholar] [CrossRef]
- Transportation Research Board Chapter 17 Urban Street Segments. In Highway Capacity Manual 2010; Transportation Research Board of the National Academies: Washington, DC, USA, 2010; ISBN 978-0-309-16077-3.
- Furth, P.G.; Mekuria, M.C.; Nixon, H. Network Connectivity and Low-Stress Bicycling. Transp. Res. Rec. J. Transp. Res. Board 2016, 2587, 41–49. [Google Scholar] [CrossRef]
- CROW Design Manual for Bicycle Traffic; Centre for Research and Contract Standardization in Civil and Traffic Engineering C.R.O.W: Ede, The Netherlands, 2016; ISBN 978 90 6628 494 4.
- Dill, J.; McNeil, N. Four Types of Cyclists? Transp. Res. Rec. J. Transp. Res. Board 2013, 2387, 129–138. [Google Scholar] [CrossRef]
- Geller, R. Four Types of Cyclists; Portland Office of Transportation: Portland, OR, USA, 2009. [Google Scholar]
- Envall, P. Accessibility Planning: a chimera? Ph.D. Thesis, University of Leeds, Leeds, UK, 2007. Available online: http://etheses.whiterose.ac.uk/id/eprint/11279 (accessed on 20 May 2019).
- Stigell, E. Assessment of active commuting behavior: Walking and bicycling in Greater Stockholm. Ph.D. Thesis, Örebro University, Örebro, Sweden, 2011. Available online: http://urn.kb.se/resolve?urn=urn:nbn:se:oru:diva-16372 (accessed on 20 May 2019).
- Pritchard, R. Revealed Preference Methods for Studying Bicycle Route Choice—A Systematic Review. Int. J. Environ. Res. Public Health 2018, 15, 470. [Google Scholar] [CrossRef]
- Snizek, B.; Nielsen, T.A.S.; Skov-Petersen, H. Mapping bicyclists’ experiences in Copenhagen. J. Transp. Geogr. 2013, 30, 227–233. [Google Scholar] [CrossRef]
- Cervero, R.; Denman, S.; Jin, Y. Network design, built and natural environments, and bicycle commuting: Evidence from British cities and towns. Transport Policy 2019, 74, 153–164. [Google Scholar] [CrossRef]
- Pritchard, R.; Frøyen, Y. Location, location, relocation: How the relocation of offices from suburbs to the inner city impacts commuting on foot and by bike. Eur. Transp. Res. Rev. 2019, 11, 14. [Google Scholar] [CrossRef]
- Broach, J.; Dill, J.; Gliebe, J. Where do cyclists ride? A route choice model developed with revealed preference GPS data. Transp. Res. Part A Policy Pract. 2012, 46, 1730–1740. [Google Scholar] [CrossRef]
- Park, Y.; Akar, G. Why do bicyclists take detours? A multilevel regression model using smartphone GPS data. J. Transp. Geogr. 2019, 74, 191–200. [Google Scholar] [CrossRef]
- Kang, L.; Fricker, J.D. Bicycle-Route Choice Model Incorporating Distance and Perceived Risk. J. Urban Plan. Dev. 2018, 144, 04018041. [Google Scholar] [CrossRef]
- Segadilha, A.B.P.; da Penha Sanches, S. Analysis of Bicycle Commuter Routes Using GPSs and GIS. Procedia Soc. Behav. Sci. 2014, 162, 198–207. [Google Scholar] [CrossRef]
- Rupi, F.; Schweizer, J. Evaluating cyclist patterns using GPS data from smartphones. IET Intell. Transp. Syst. 2018, 12, 279–285. [Google Scholar] [CrossRef]
- Aultman-Hall, L.; Hall, F.L.; Baetz, B.B. Analysis of Bicycle Commuter Routes Using Geographic Information Systems: Implications for Bicycle Planning. Transp. Res. Rec. J. Transp. Res. Board 1997, 1578, 102–110. [Google Scholar] [CrossRef]
- Hyodo, T.; Suzuki, N.; Takahashi, K. Modeling of Bicycle Route and Destination Choice Behavior for Bicycle Road Network Plan. Transp. Res. Rec. J. Transp. Res. Board 2000, 1705, 70–76. [Google Scholar] [CrossRef]
- Krizek, K.J.; El-Geneidy, A.; Thompson, K. A detailed analysis of how an urban trail system affects cyclists’ travel. Transportation 2007, 34, 611–624. [Google Scholar] [CrossRef]
- Hulleberg, N.; Flügel, S.; Ævarsson, G. TØI Report 1648/2018. Vekter for Sykkelinfrastruk- tur til bruk ved Rutevalg i Regionale Transportmodeler [Empirical Based Infrastructure Weights for Bicycle Route Choice]; Institute of Transport Economics: Oslo, Norway, 2018; ISBN 9788248021650. [Google Scholar]
- Prato, C.G. Route choice modeling: past, present and future research directions. J. Choice Model. 2009, 2, 65–100. [Google Scholar] [CrossRef]
- Bovy, P.H.L. On Modelling Route Choice Sets in Transportation Networks: A Synthesis. Transp. Rev. 2009, 29, 43–68. [Google Scholar] [CrossRef]
- Howard, C.; Burns, E.K.; Information, R. Cycling to Work in Phoenix: Route Choice, Travel Behavior, and Commuter Characteristics. Transp. Res. Rec. J. Transp. Res. Board 2001, 1773, 39–46. [Google Scholar] [CrossRef]
- Dijkstra, J.; De Vries, B.; Jessurun, J. Wayfinding Search Strategies and Matching Familiarity in the Built Environment through Virtual Navigation. Transp. Res. Procedia 2014, 2, 141–148. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method Name | Bicycle Safety Index Rating | Bicycle Stress Level | Florida Roadway Condition Index | Bicycle Interaction Hazard Score | Bicycle Suitability Rating | Real-Time Bicycle LOS | Bicycle Compatibility Index | Danish Bicycle LOS | 6th ed. US Highway Capacity Manual | Level of Traffic Stress | Bicycle LOS—India | Evaluation of Bicycle Suitability |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Reference | Davis, 1987 [33] | Sorton & Walsh, 1994 [34] | Epperson, 1994 [33] | Landis, 1994 [35] | Davis, 1995 (Davis, 1995 in [36]) | Landis et al., 1997 [10] | Harkey et al., 1998 [37] | Jensen, 2007 [38] | TRB, 2016 [8,39] | Mekuria et al., 2012 [31,40] | Beura et al., 2018 [41] | Majumdar& Mitra, 2018 [32] |
| Acronym | BSIR | BSL | RCI | IHS | BSR | RTBLOS | BCI | DBLOS | HCM6 | LTS | BLOS-I | EBS |
| AADT | - | - | - | - | - | - | - | - | - | - | - | - |
| Bicycle Facility Width/Presence | P | P | P | P | ||||||||
| Bicycle Separation from Traffic | P | |||||||||||
| Bus Facilities | - | - | ||||||||||
| Driveways | - | - | - | - | - | - | - | |||||
| Kerb Height/Presence | - | - | - | |||||||||
| Land Use Intensity | - | - | - | - | - | - | X | - | - | |||
| Lighting | ||||||||||||
| Line of Sight | P | P | P | |||||||||
| Median Strip | P | P | P | |||||||||
| Number/Type of Traffic Lanes | P | P | P | P | P | P | P | P | - | |||
| On-street Parking | - | - | - | - | - | - | - | - | - | - | ||
| Percentage of Heavy Vehicles | - | - | - | |||||||||
| Road Grade | - | - | - | |||||||||
| Shoulder | P | - | P | P | P | P | ||||||
| Signage-Bicycles | ||||||||||||
| Signalised Intersection | - | |||||||||||
| Speed | - | - | - | - | - | - | - | - | - | - | - | P |
| Surface Quality | P | P | P | P | P | P | P | P | ||||
| Traffic Calming Features | ||||||||||||
| Turning/Crossing Traffic | - | - | ||||||||||
| Vegetation/ Green Space | ||||||||||||
| Width of outside Lane (inc. Bike lane/shoulder) | P | P | P | P | P | P | P | P | P | P | P |
| Data Source | Input Data Set | Data Type |
|---|---|---|
| Norwegian Mapping Authority & Norwegian Public Roads Administration | Street network including paths and topography (Norwegian “elveg” database) | Geodatabase—centrelines of roads |
| Norwegian National Road Database | AADT traffic volumes, speed limit and lane width data | ArcMAP API toolbox |
| Authors, kart.finn.no aerial photography | Missing links for pedestrians and bicycle users. Supplementary information for the network (parking, bicycle lanes, kerb presence) | Geodatabase (manual editing) |
| Survey respondents | Mapped bicycle route choice (mapping API) | Geographic JavaScript Object Notation (GeoJSON) |
| LTS Level | Impedance Factor for Links (for Max Detour Rate of 15%) | Virtual Buffer Length (in Metres) | Maximum Penalty Length (in Metres) |
|---|---|---|---|
| 1 (best) | 1 | 0 | 0 |
| 2 | 1.05 | 8.33 | 0.42 |
| 3 | 1.10 | 16.67 | 1.67 |
| 4 (worst) | 1.15 | 25 | 3.75 |
| Detour Rate (Percentage Additional Length) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| LTS level | 0 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 1 (best) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 2 | 1 | 1.02 | 1.03 | 1.05 | 1.07 | 1.08 | 1.10 | 1.12 | 1.13 | 1.15 | 1.17 |
| 3 | 1 | 1.03 | 1.07 | 1.10 | 1.13 | 1.17 | 1.20 | 1.23 | 1.27 | 1.30 | 1.33 |
| 4 (worst) | 1 | 1.05 | 1.10 | 1.15 | 1.20 | 1.25 | 1.30 | 1.35 | 1.40 | 1.45 | 1.50 |
| Detour Rate (Percentage Additional Length) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| LTSlink to LTSmax | 0 | 5 | 10 | 15 * | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 1 to 2 | 0 | 0.14 | 0.28 | 0.42 * | 0.56 | 0.69 | 0.83 | 0.97 | 1.11 | 1.25 | 1.39 |
| 1 to 3 | 0 | 0.56 | 1.11 | 1.67 * | 2.22 | 2.78 | 3.33 | 3.89 | 4.44 | 5.00 | 5.56 |
| 1 to 4 | 0 | 1.25 | 2.50 | 3.75 * | 5.00 | 6.25 | 7.50 | 8.75 | 10.00 | 11.25 | 12.50 |
| 2 to 3 | 0 | 0.42 | 0.83 | 1.25 | 1.67 | 2.08 | 2.50 | 2.92 | 3.33 | 3.75 | 4.17 |
| 2 to 4 | 0 | 1.11 | 2.22 | 3.33 | 4.44 | 5.56 | 6.67 | 7.78 | 8.89 | 10.00 | 11.11 |
| 3 to 4 | 0 | 0.69 | 1.39 | 2.08 | 2.78 | 3.47 | 4.17 | 4.86 | 5.56 | 6.25 | 6.94 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pritchard, R.; Frøyen, Y.; Snizek, B. Bicycle Level of Service for Route Choice—A GIS Evaluation of Four Existing Indicators with Empirical Data. ISPRS Int. J. Geo-Inf. 2019, 8, 214. https://doi.org/10.3390/ijgi8050214
Pritchard R, Frøyen Y, Snizek B. Bicycle Level of Service for Route Choice—A GIS Evaluation of Four Existing Indicators with Empirical Data. ISPRS International Journal of Geo-Information. 2019; 8(5):214. https://doi.org/10.3390/ijgi8050214
Chicago/Turabian StylePritchard, Ray, Yngve Frøyen, and Bernhard Snizek. 2019. "Bicycle Level of Service for Route Choice—A GIS Evaluation of Four Existing Indicators with Empirical Data" ISPRS International Journal of Geo-Information 8, no. 5: 214. https://doi.org/10.3390/ijgi8050214