1. Introduction
Historically, the discoverability and accessibility of geospatial content was difficult, as data were not available online, were encoded through different proprietary formats and were often not documented through metadata [
1]. These were among the main technical arguments for the establishment of spatial data infrastructures (SDIs) during the 1990s. Nowadays, the situation is completely different. The rapid establishment of technologies as part of the emerging Internet of Things (IoT), combined with the increased importance of the private sector and citizens as users and creators of content, is generating unprecedented volumes of data. Not only are the heterogeneity and volumes of data rapidly increasing, but they are also produced in near real-time conditions. Specifically IoT devices, deployed on a huge scale or as networks of sensors, contribute to this diversity of data and their availability. This, combined, poses completely new challenges regarding the utilisation and processing of data. Geospatial data are no exception to this. In particular, addressing the (spatio)temporal dimension requires: (i) new delivery and access methods; (ii) innovative means for encoding and exchanging spatiotemporal data from constrained devices; and (iii) new standards for data interoperability.
While event-based communication flows and data analysis technologies are already available as mainstream technologies (see
Section 2.4.2 and
Section 2.5), many current SDIs do not make use of such possibilities. However, there would be several advantages which could help to further improve the applicability and operation of SDIs. Examples include:
Notification about specific events that occurred (e.g., if a threshold is exceeded) (see
Section 4.1 and
Section 4.3).
Timely delivery of updated geospatial data as soon as they are available (e.g., delivering results of weather models or new satellite images immediately when they are published) (e.g., see
Section 4.2).
Reducing the network load: Applications such as water level monitoring rely on the availability of up-to date measurements. However, many sources of observation data are still only accessible in a request/reply pattern, so that clients constantly poll the current measurements just for checking if new data is available. In case of emergency scenarios such pattern leads to high server and network loads. An alternative approach that sends new measurements to subscribers as soon as they are available, would avoid this unnecessary network traffic (e.g., see
Section 4.1 and
Section 4.2).
Triggering further processing flows as soon as updated input data is available (see
Section 4.4).
Closely related are [
2,
3], highlighting the need for a theoretical framework that would cater for a process-based approach towards data as a complement to the very well established foundations of contemporary Geoinformation Science (GI Science). This is also illustrated by some of the application examples outlined above, which would benefit from dynamic interaction between data sources and processes. As a result, the described event-driven architecture approach could enhance existing SDI concepts with an additional communication paradigm that supports the creation of dynamic, process-based data analysis workflows.
In this manuscript, we elaborate on eventing in SDIs. Our objectives are twofold: On the one hand, we identify limitations and corresponding challenges of current SDIs for an adequate incorporation of near real-time data. On the other hand we elaborate on approaches on how to tackle this kind of data. The latter is illustrated through specific case studies where event-driven architectures are outlined that can be integrated into existing SDIs to strengthen their capabilities on real-time information and eventing.
Structurally, our work is divided into five sections. Following this brief Introduction (
Section 1), we illustrate the current state of “eventing” in GI Science (
Section 2). A description of architectural patterns and the challenges that remain is provided in
Section 3. Subsequently, we discuss different new approaches for eventing which have been developed for specific application scenarios (
Section 4). Finally, we conclude by summarising our findings and discuss open issues in
Section 5.
2. Eventing in GI Science: State of the Art
In this section we: (i) provide an overview of the theoretical foundations of eventing in GI Science and share several definitions of selected frequently used terms; (ii) position eventing in the context of spatial data infrastructures; (iii) outline the most relevant standardisation initiatives; and (iv) describe relevant software products.
The relevance of the described topics is motivated by a range of application scenarios which are described in
Section 4.
Table 1 provides an overview.
2.1. Spatial Data Infrastructures and Related Software Architecture Approaches
To enable the further understanding of the ideas presented in this paper, first the concept of SDIs are introduced. SDIs comprise a range of technologies, policies and institutional arrangements to enable the distributed management and (often web-based) exchange of geospatial data. For this purpose, SDIs usually make use of commonly established information technology concepts. For example, most currently operating SDIs are based on the concept of service-oriented architectures (SOA).
SDIs have brought multiple technological, organisational and legal novelties that have improved the availability of spatial data for online reuse. The resulting benefits have been recognised, for example, in Europe, where a law obliges public sector providers of environmental data to comply with the requirements of the Infrastructure for Spatial Information in Europe (INSPIRE) Directive [
4].
In accordance with INSPIRE, data providers shall: (i) create metadata; (ii) establish network services; and (iii) harmonise their datasets in accordance with commonly agreed data specifications. The aforementioned network services are to be put in place in order to enable: (i) discovery of data through their metadata; (ii) interactive web-based viewing; (iii) download; and (iv) data transformation.
As a classic SDI, INSPIRE has been conceived as a SOA, based on the client-server model and on the request/reply message exchange pattern (MEP). Meanwhile, with the development of modern applications, such as content streaming, and advanced distributed systems, such as peer to peer networks, industry and community experts started to point out the shortcomings of the request/reply pattern, typical of SOAs and classic SDIs. As noted by an analyst at Gartner: “SOA as we know it today deals with a client-server relationship between software modules. However, not all business processes and software topologies fit this model” [
5]. In particular, web services, as established in contemporary SOA-based SDIs, rely on this request/reply pattern. Thus, while waiting for new data, a client must repeatedly request the desired information (polling). This has undesirable side effects: if a client polls frequently this can increase server load and network traffic, and if a client polls infrequently it may not receive a message when it is needed.
INSPIRE download services are particularly interesting in this regard, as they effectively provide access to the spatial (and spatiotemporal) data made available within an SDI. On a conceptual level, download services are typically defined to follow the request/reply communication model: a client makes a request and the server responds synchronously, with either the requested information or a failure. This provides relatively immediate feedback, but can be insufficient in case the client is waiting for a specific event (such as data arrival, server changes, or data updates).
Shortly after SOA, another architectural model has emerged, named event-driven architecture (EDA), which emphasises the ability to monitor and react to events. There is abundant literature on the relationship between SOA and EDA. The combination of both is sometimes referred to as event-driven SOA, or also SOA 2.0 [
6,
7]. In synthesis, the two approaches can be seen as complementary to each other, the main difference being the reactive nature of SOA request/reply pattern, as compared to the proactive nature of EDA, characterised by the publish/subscribe interaction, described in the following section. Within this context, a recent activity [
8] investigates the use of the OGC SensorThings API as an INSPIRE download service.
2.2. The Publish/Subscribe Pattern
As described before, the publish/subscribe communication pattern is a central element for enabling event-based data flows. Thus, it can be considered as an important element for building event-driven SDIs. Consequently, this section gives a short introduction to the concept.
The publish/subscribe MEP is distinguished from the request/reply MEP by the asynchronous delivery of messages between a server and a client, allowing the client (i.e., the subscriber) to specify an ongoing (persistent) expression of interest. Note that such expression of interest requires the server (i.e., the publisher) to maintain states of subscriptions and therefore the fundamental publish/subscribe interaction is stateful.
The publish/subscribe MEP can be useful to reduce the latency between event occurrence and event notification, as it is the publisher’s responsibility to publish a message when the event occurs, rather than relying on clients to anticipate the occurrence. The publish/subscribe MEP can also be used to decouple message production from message consumption by allowing messages to be passed through a third party (a message broker). This allows entities in a system to be changed (with respect to implementation, network location, etc.), as long as the agreed-upon message format and publication location remain the same.
Two primary parties characterise the publish/subscribe interaction style: a publisher, which is publishing information, and a subscriber, which expresses an interest in all or part of the published information. Publishers and subscribers are fully decoupled in time, space, and synchronisation [
9].
Two other actors involved are the actual entity to which data are to be delivered, i.e., the receiver, and the entity actually delivering the data, i.e., the sender. In many cases, the subscriber coincides with the receiver. However, the two roles may be distinguished, for example in a use case where a system manager, acting as a subscriber, sets up the information flows from publishers to a number of other system entities that act as receivers. Similarly, the publisher and sender roles are often implemented by the same entity, but may be segregated. For example, the sender role may be implemented by a chain of entities, possibly unaware of the ultimate recipient of their messages and of the overall architecture of the system into which they inject messages.
A publish/subscribe model typically includes several functional components, which are variously implemented by the existing technologies (e.g., WS-Notification, WS-Eventing, and ATOM):
Filtering semantics—selecting desired information.
Subscription semantics—duration of subscription, renewal of subscription, cancellation.
Publication semantics—what, when, where, who of the published information.
Wire/delivery protocol—reliable delivery, link failure detection, at-most-once or at-least-once delivery, firewall solution.
Security—transport encryption, authentication, policy enforcement, etc.
Capabilities advertisement—what PubSub capabilities a service offers.
2.3. Spatio-Temporal Data Streams
During the last years, the availability and granularity of geospatial data has been rapidly growing. Additionally, spatiotemporal data streams provide multiple opportunities in fields such as smart cities, environmental risk assessment, precision farming and disaster response. All of those application domains require algorithms that process massive volumes of spatiotemporal data in near real-time. Historically, spatiotemporal data come in a variety of forms and representations, depending on the domain, the observed phenomenon and the acquisition approach. Because these types of data streams are an important factor to be considered for the design of event-driven SDIs, this section provides a short overview. Three types of spatiotemporal data streams can be outlined [
10,
11], namely spatial time series, events, and trajectories.
A spatial time series consists of tuples (attribute, object, time, and location)
An event is triggered from a spatial time series under certain conditions and contains the tuples verifying these conditions
A trajectory is a spatial time series for a particular moving object. It contains the location per time and is a series of tuples.
The automated detection of events in spatiotemporal data streams is a well-established research area (see e.g., [
12] for an overview). Depending on the application, the event detection can analyse single trajectories (e.g., an aircraft), spatiotemporal measurement time series, or heterogeneous data streams. The examples below highlight the capabilities of each approach:
Spatiotemporal measurements: A spatiotemporal value can focus on a specific spatially limited observation (e.g., water gauge measurements) or span regions (e.g., traffic flow, air pollution or noise). Sudden changes of such values can indicate anomalies but might also be caused by a failure of measurement equipment. Distinguishing between these two cases is a crucial capability required for spatiotemporal measurement processing.
Individual mobility and group movement: Both fields are related in terms of acquisition methods (e.g., surveillance cameras) and make use of pattern or sequence recognition to identify certain events (e.g., detection of unusual behaviour [
13] and hazardous pedestrian densities [
14])
Heterogeneous sensor networks: In the past years, the design of sensor stations progressed more and more to integrated small-scale solutions (sensing IoT devices, smart sensors [
15]). Therefore, maintainers of established sensor networks look for ways of integrating these into their existing architecture. Applications built for these sensor networks need to deal with the heterogeneity of the different observation devices.
These types of streams differ from each other on various aspects. While spatiotemporal measurements feature well-structured data models and are available as time series, data streams within heterogeneous sensor networks often vary in their format and structure—even within one network. Therefore, dedicated technology is required to extract relevant observations from the raw data. Data streams for individual mobility and group movement distinguish themselves from the former as no single observations are extracted. Instead patterns are derived from movement and are further processed (e.g., using geofencing).
2.4. Relevant Standards
Standards are a core element for enabling interoperability within SOAs such as SDIs. Consequently, this section provides the necessary background on relevant SDI standards but also IoT standards which might help to develop event-driven SDI architectures.
Web services such as the Web Map Service or the Web Feature Service, defined by the Open Geospatial Consortium (OGC), build the foundation for the majority of existing SDIs. We therefore renounce to describe these but focus on standards which are promising candidates for event-driven architectures within SDIs. Both high-level concepts such as the emerging OGC Publish/Subscribe Interface as well as technologies on a lower level are introduced.
2.4.1. Open Geospatial Consortium
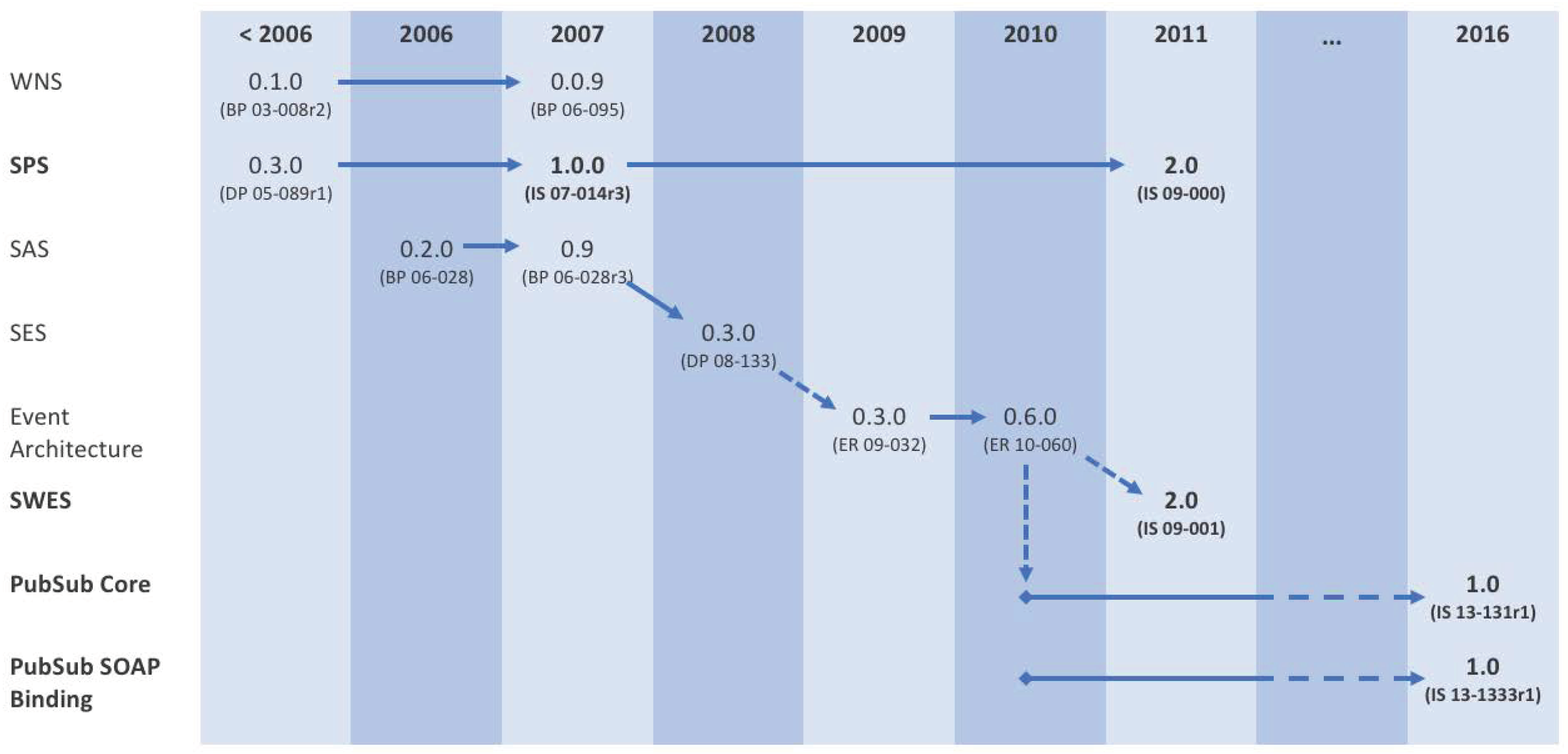
As illustrated in
Figure 1, the OGC has conducted much work, in the past, on event-driven models and architectures (see also [
16,
17]).
During 2006–2011, several lines of activities eventually consolidated into a revision of the Sensor Planning Service (SPS 2.0), an interface for querying a sensor about its capabilities and tasking it, and a version-aligned Standard Service Model (SWES 2.0) for the OGC Sensor Web Enablement initiative.
Both standards contained provisions for publish/subscribe interactions, which were increasingly seen as a generally useful enabler for the OGC standard baseline, even beyond the Sensor Web realm. In 2010, a specific PubSub Working Group was started, to define a self standing OGC standard for publish/subscribe, which is introduced in the next section.
OGC PubSub
The OGC Publish/Subscribe Interface Standard (in short, PubSub) describes a mechanism to support publish/subscribe requirements across OGC data types, such as coverages, features, and observations, and service interfaces, such as Sensor Observation Service (SOS) and Catalogue Service for the Web (CSW). The standard, officially approved in February 2016, is a long-awaited building block in the OGC suite of geospatial standards, and a fundamental enabler towards an event-driven SDI. It has been successfully applied to several application domains, including the Sensor Web and Aviation [
18].
The rationale for PubSub can be summarised as follows:
OGC service clients are interested in subscribing to information already provided by OGC services.
OGC services have developed relatively mature and specialised request/reply mechanisms for accessing and filtering the information provided (e.g., the Filter Encoding Specification (
http://www.opengeospatial.org/standards/filter) for general-purpose filtering).
Such filtering semantics can be used for implementing publish/subscribe use-cases and need not be re-invented or generalised.
PubSub consists of two parts: (i) a Core document [
19] that abstractly describes the basic mandatory functionalities and several optional extensions, independently of the underlying binding technology; and (ii) a SOAP binding document [
20] that defines the implementation of PubSub in SOAP services, based on the OASIS Web Services Notification (WS-N) set of standards [
21].
The scope of the OGC PubSub Standard Working Group also includes a RESTful binding document (currently in draft status) that will specify how to realise the PubSub functionality in REST/JSON services. Additional extensions have been proposed in the framework of the OGC Testbed-12 initiative: (i) a specific PubSub 1.0 extensions for CSW 2.0.2 and 3.0, leveraging on standard functionalities, data models, and semantics to enable sending notifications based on user-specified area of interest and/or keywords; and (ii) a basic mechanism to PubSub-enable any generic OGC web service leveraging on its existing request/reply interaction data models and semantics [
22].
Web Processing Service
The OGC Web Processing Service (WPS) standard is based on the synchronous request/reply model and implements the classical Remote Procedure Call communication paradigm. To minimise synchronisation between clients and servers and to avoid timeouts while waiting for the reply of a remote invocation, the standard allows the client to request a handle through which the actual return value can be accessed in the future, when needed [
9].
Orchestration and automated processing has been achieved with WPS-based service architectures [
23,
24]. Further work has been performed on event-driven architectures based on WPS workflows. An extension to the WPS, called the Web Event Processing Service (WEPS), has been developed to allow time series event pattern matching [
25]. This architecture is based on classic request/response requests to manage user subscriptions to specific events.
2.4.2. IoT Protocols
Events such as those defined in
Section 2.3 are often emitted by resource-restricted devices in IoT settings. In the literature, many discussion papers can be found about the optimal IoT application protocol to send and collect the related messages (e.g., [
26]). In fact, every protocol has its advantages and disadvantages. The following overview is a non-exhaustive list and should give the reader an overview of its suitability within the context of SDIs and eventing. A selection of these has been applied in the application scenarios presented in
Section 4.
HTTP
HTTP/1.1 (
https://tools.ietf.org/html/rfc2616/) is well known and simple but because of its request/response model, it cannot be used to emit events and initiate data streams. In addition, it has a large overhead and cannot implement a 1-to-n communication. Protocols which support a push-mechanism such as a publish/subscribe MEP seem more suitable for event dissemination by IoT devices. HTTP/2 (
https://tools.ietf.org/html/rfc7540) introduces a mechanism for server pushes, but the intended use case is the pre-loading of assets and resources of websites to reduce the loading time. The provision of data streams does not fit into its concept.
CoAP
The Constrained Application Protocol (CoAP) (
https://tools.ietf.org/html/rfc7252/) is based on UDP and relies on the request/response pattern as well. It is often termed as “HTTP for UDP” since it has a similar method set compared to HTTP and REST-APIs can be realised. However, it also includes an “observe” feature which can be used to accomplish a server-based push-mechanism. It is very efficient and aims for wireless sensor networks. However, since it is based on UDP, it may be problematic in IoT applications.
XMPP
The Extensible Messaging and Presence Protocol (XMPP) (
https://tools.ietf.org/html/rfc6120/) is based on XML and implements push-based communication mechanisms. It can be extended by so-called XEPs, some of them are also defined specifically for IoT purposes. Because it is famous for chat clients, it has been implemented in a variety of programming languages with different features. A major drawback is the large overhead which is created by the use of XML encodings. Therefore, it is barely used in IoT settings.
MQTT
The Message Queuing Telemetry Transport (MQTT) [
27] is a standardised messaging protocol implementing the publish-subscribe MEP over TCP/IP. It is designed to have a minimal overhead for message payloads thus allowing the application in low-bandwidth networks as well as embedded devices. These characteristics make it a good fit for IoT applications, however the usage of MQTT has grown beyond the IoT.
The core concept of MQTT is the topic. Clients can subscribe to topics in order to receive corresponding messages. Topics can represent a hierarchy which allow subscribers to subset data stream. e.g., a topic such as sensor-platform-1/NOx would publish NOx measurements of sensor-platform-1. A subscriber may register for the topic sensor-platform-1/+, which has a wildcard for the second hierarchy level, and, thus, not solely receives NOx messages but also other phenomenon measurements.
Many software projects have been established for MQTT, ranging from broker implementations to client libraries. Besides TCP/IP, many brokers support the WebSocket protocol (
https://tools.ietf.org/html/rfc6455) to enable seamless integration into (web) user interfaces.
GeoMQTT
GeoMQTT extends the MQTT protocol by spatiotemporal filtering capabilities [
28]. While the original protocol tags every message with a topic name and matches the corresponding interests, the spatiotemporal extension also adds a geometry and a time stamp or time period to each published event. Given these three dimensions, the protocol can be used by clients to publish spatiotemporal events or processes. Subscribers may use additional spatial and temporal filters to register their spatiotemporal interests with the message broker, which validates the filters against the incoming events and notifies the corresponding clients. The spatial filter consists of a geometry defined by common encoding standards and a spatial relation according to the DE-9IM model [
29]. The temporal filter uses time intervals and a temporal relation which is defined by Allen’s interval algebra for interval-interval relations [
30] or Vilain’s interval-point relations [
31].
WebSub
Formerly known as PubSubHubbub [
32], WebSub is an open protocol for publish/subscribe communication. It is well-established among web media and related content providers. One of its prominent use cases is the provision of new content from providers (e.g., blogs such as Wordpress or Medium.com) to news feed service providers (e.g., Feedly or Flipboard).
WebSub builds upon the publish/subscribe model and specifically introduces a third party, the Hub. The Hub interacts as an intermediate layer between publisher and subscribers. Compared to other publish/subscribe technologies, WebSub focusses on the information that new content or data is available without necessarily distributing the actual content. This is achieved by the concept of the “Light ping”: the publisher informs the Hub about content availability, and the Hub subsequently informs the subscribers. Besides the content location, the “Light ping” only features a small set of information (e.g., title and abstract) and subscribers may decide to fetch the full data. WebSub is a lightweight protocol with low bandwidth, but implies that the actual data are available via the HTTP protocol on the provider’s side.
2.5. Relevant IoT Event Processing Software
There are different software solutions available for enabling event processing in IoT environments. The following paragraphs introduce several open source and proprietary software packages which are applied in practice. This non-exhaustive overview illustrates the rather broad range of existing tools and frameworks which have the potential to help with the implementation of event-driven SDIs based on the standards introduced in
Section 2.4.
The increasingly deployed location-aware IoT devices result in an exponentially growing number of spatiotemporal events and streams. The desire to process these data streams in a real-time manner and to finally support decision-making processes drives the development of suitable tools and algorithms for event processing.
Event processing can be divided into Complex Event Processing (CEP) and Distributed Stream Processing (DSP). Both can be applied to spatiotemporal data streams. CEP solutions analyse concurrent events and emit derived new events based on their combination. The complex part of such solutions represents fusing and synthesising events from multiple sources, while the event processing refers to checking the joint events against query patterns. Traditionally, CEP frameworks are implemented with centralised architectures and provide no scalability. DSP focuses on the high volume and velocity of data streams. These tools are scalable and have different requirements than CEP systems. One example is the Kappa architecture described in [
33].
Esper
Esper (
http://www.espertech.com/esper/) is a multi-lingual (Java and .NET) CEP framework. It works on streams of data and allows to apply aggregate functions as well as pattern matching, also across multiple data streams. By offering an SQL-like domain specific language, the Event Processing Language (EPL), Esper provides a transparent and easy way of defining these functions and patterns. The EPL allows to apply basic statistical functions such as minimum/maximum, sums and counts or averages. Filtering data can be achieved by applying basic comparisons (e.g., greater than) on the stream data. It supports different types of data windows (time-based, count-based). While Esper is an open source project, an enterprise edition is available, which builds upon established Big Data frameworks such as Apache Kafka (see below) to support horizontal scaling and fault-tolerance mechanisms.
In the context of eventing in GI Science, Esper can be understood as a framework that is integrated under the hood of specific components, providing essential business logic which is required to support different use cases such as the analysis of time series data streams.
Apache Storm
Apache Storm (
http://storm.apache.org/) is a real-time stream processor written in Java and belongs to the group of DSP systems. Apache Storm is also used in several research activities to analyse spatiotemporal data streams. Zhang et al. [
34] utilised Apache Storm to implement a distributed spatial index for moving objects and, finally, provide real-time traffic decision support. Mattheis et al. [
35] built a scalable map matching system with Apache Storm.
Storm uses topologies as an application abstraction to model units of computation. A topology forms a directed acyclic graph with different nodes which process the data while the data stream advances in the graph. These nodes can either be input units for data tuples (spouts) or processing units (bolts). The flow of the data tuples in the graph and therefore between different physical machines is controlled by different grouping types. For instance, the field type groups according to a key in the data tuples. The communication and coordination of the distributed processing is achieved by a manager node, the Nimbus. Storm implements a backup and acknowledgement mechanism. It ensures that each data tuple is either processed once or if a failure occurs, it is reprocessed by the topology.
Besides Apache Storm, other DSP solutions are based e.g., on Apache Flink (
https://flink.apache.org/) or Apache Spark Streaming (
https://spark.apache.org/streaming/). A performance comparison between these different frameworks can be found, e.g., in Lopez et al. [
36]. For all these solutions, the data stream provisioning and delivery plays an important role, which can be accomplished by Apache Kafka.
Apache Kafka
Similar to
Storm and
Spark,
Kafka (
https://kafka.apache.org/) is a top-level software project of the Apache Software Foundation. It is designed to be a low-latency stream-processing framework in the Java ecosystem. In settings with distributed computing workers, Kafka has been established as a message broker that operates as a publish/subscribe service and can be used as multi-node load balancer. Events in Kafka are called
messages. The software abstracts message streams into
topics which operate as buffers or queues. Each topic is split into a set of partitions. Kafka is designed to work in a cluster environment. By replicating the partitions of a topic to multiple cluster nodes, Kafka provides not only a built-in failover system but also a highly effective architecture to apply distributed stream processing.
Kafka provides a set of APIs which allow developers to plug into the platform:
Consumer API: allows a component to listen to specific topics of interest
Streams API: intermediate components can apply processes and algorithms on the message stream and provide the result back to Kafka on a dedicated topic
Connectors: used to integrate components (input or output) that are not part of the platform itself (e.g., databases)
Kafka is a key pillar in Java-based Big Data and IoT architectures (e.g., [
37]). It is able to integrate with Apache Hadoop (
http://hadoop.apache.org/) and other related Apache frameworks such as Storm and Spark (see above).
ESRI GeoEvent Server
Esri introduced an event based processing framework written in Java back in 2012, which is nowadays called ArcGIS GeoEvent Server. The GeoEvent Server uses different input and output connectors to ingest data streams from a variety of sources and formats, process them in a common event format and distribute the events to different systems inside and outside of Esri’s Web GIS platform solution [
38].
From the 2018 v10.6 release on, the GeoEvent Server started to utilise Apache Kafka as an underlying messaging framework, replacing RabbitMQ that was used in former versions. This allows harvesting the benefits of Apache Kafka, as described above, to scale horizontally and run multiple GeoEvent Server instances in a multi-machine site for parallel event processing [
39].
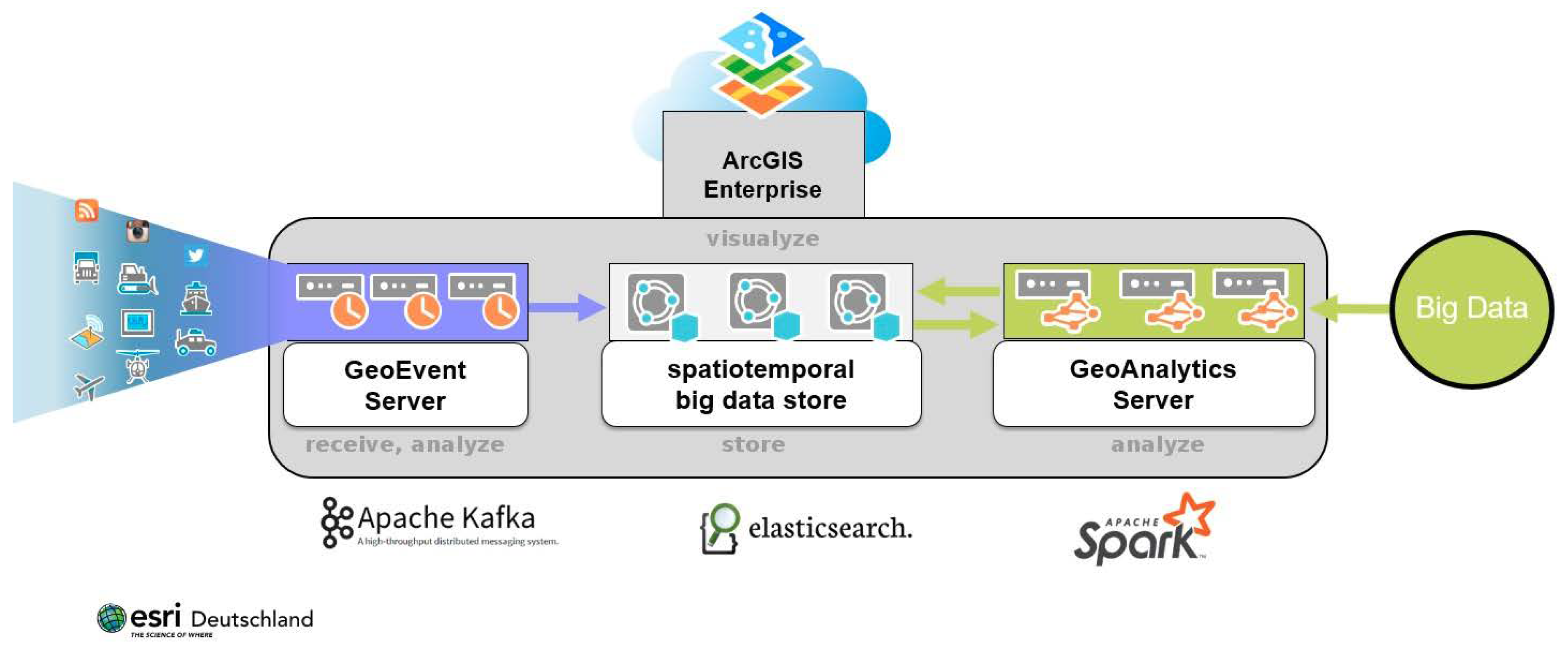
Esri is also using Apache Spark as a framework for distributed processing of data in their ArcGIS GeoAnalytics Server solution (see
Figure 2) to analyse large amounts of spatiotemporal data [
40]. It will also be used in a new, highly scalable Software as a Service solution that will provide comprehensive geo-spatial analytic options for the IoT world as part of the ArcGIS Online platform. Here a combination of Apache Kafka and Apache Spark is used for both streaming and batch analytics [
38,
41].
3. Gaps in Event-Driven SDI
The previous sections have introduced on the one hand the state of the art of spatial data infrastructure concepts and technologies and on the other hand important technological developments to enable event-driven information flows. However, there are still many open research challenges which need to be addressed before enhancing current spatial data infrastructure with event-driven functionalities.
The challenges outlined below were derived from the requirements of several projects (see
Section 4). Further analysis and discussion of these gaps took place during the workshop “Event-based Dissemination and Processing of Geospatial Information” conducted as part of the AGILE 2017 conference. Although the list below is non-exhaustive, the presented challenges form the motivation for our work and are introduced in the following subsections.
3.1. Defining and Determining Events
There are many definitions of the term “event” available, and the existing definitions differ. From a conceptual perspective, we describe the characteristics of events in
Section 2.3. In addition, and from a broader perspective, one can rely on the definition that an “event is a notable thing that happens inside or outside your business” [
6]. At the same time, this definition opens up a series of further questions regarding the technical definition of events in practical applications.
First, it is necessary to define what a “notable thing” is. For the purpose of observation data, an event would be a notable observation within an incoming observation dataset/data stream. This can for example be characterised by a certain range or pattern of observation values. A common example would be the exceedance of threshold values. Other typical events might be properties such as the rate of change (in case of scalar observations), the occurrence of specific values (especially in case of categorical or Boolean observations), the presence of mobile objects within defined areas (geofencing), or the absence of new observation values within a given period of time (e.g., as an indicator for sensor failure).
As a result of the broad range of possible event types, users need a mechanism to define the events they are specifically interested in. Although there have been different previous approaches such the OGC Event Pattern Markup Language (EML) Discussion Paper [
42] or the Event Processing Language (EPL) of the Esper framework (see
Section 2.5), a common interoperable definition language suited to the needs of geospatial observation data streams is still missing.
Another aspect in the context of event definition is the distinction between event filtering and event processing. In the following, we use the first term for the process of delivering only those observations from a data stream that fulfil certain user-defined criteria (e.g., only forwarding those measurements above a given threshold). The second term, event processing, refers to the generation of new, higher level information from an incoming observation data stream. For example, certain patterns within a data stream may indicate an alert situation. In this case, not the individual measurements themselves are delivered but the higher-level information that an alert has occurred. While event filtering is already supported by PubSub, the generation of new, higher level information is not yet covered by this specification.
3.2. Handling Large Amounts of Observation Data
Another challenge is the handling of large amounts of observation data. Depending on the application scenarios, data streams from very large sensor networks with potentially very high temporal resolution needs to be analysed. For dealing with such large amounts of data, there are different solutions available (e.g., the Big Data solutions of Esri (see
Section 2.5) or the Technical University of Dortmund (see
Section 4.3)). However, this does not yet resolve all issues that are specific to geospatial observation networks. For example, due to constraints in the data transmission capacity of wireless sensor networks, a distributed detection of events across many nodes may be needed before centralised data processing tools may become applicable.
Another challenge lies in the heterogeneous nature of input data for event detection. For example many applications require the fusion of data streams from different sources (e.g., weather data and hydrometric measurements to generate flood warnings). In this case, it may become necessary to work with large datasets that have different temporal and/or spatial resolutions so that further pre-processing steps become necessary.
In summary, these different aspects require approaches for determining the performance requirements that need to be fulfilled by a potentially distributed observation network and event processing infrastructure. Relevant parameters for this question may comprise the number of distributed observation data sources, data transmission constraints, the amount of incoming data (e.g., temporal and spatial resolution), but also the number of potential users and the event detection tasks they may submit.
3.3. How to Apply Event-driven Data Flows into Spatial Data Infrastructures
Conventional SDIs do not provide means for receiving up-to-date data without delay and without manual interaction (see
Section 2.1). Typically, such infrastructures are based on the request/reply MEP. Thus, a new approach is needed for enhancing such existing infrastructures without breaking established architectures and communication flows.
One important aspect in this regard is the event-enablement of existing data sources such as sensors, databases, and web services. While for each of these elements, event-driven extensions from mainstream IT are available (see
Section 2.5), the integration of these technologies into extended spatial data infrastructures is still an open work item. In this regard the integration of geospatial IT standards with emerging mainstream information technologies will be a special challenge, as many current spatial data infrastructure concepts were developed independently from mainstream approaches beyond the geospatial domain. A central element within spatial data infrastructures are catalogues that allow the discovery of geospatial datasets as well as web services. These catalogues, however, do not yet explicitly support the discovery of data streams or services for managing event subscriptions. To close this gap, the development of dedicated meta data profiles will be necessary.
Finally, the consideration of event-driven data flows opens up a new dimension of data analysis and processing workflows within spatial data infrastructures. Besides simple ideas such as triggering certain workflows in case of a specific event, new opportunities for chaining and orchestrating fully event-driven, real-time processes become available.
3.4. Security and Reliability
In conventional spatial data infrastructures, the data transfer can be easily verified on the client side. If a client issues a pull-request, the data flow is complete as soon as the client has received the complete response. Thus, there is no significant risk of losing messages. In event-driven infrastructures, however, the client has no a priori knowledge when to expect an incoming message. For example, if an event is detected in a data stream, a notification is sent to a subscriber. However, the subscriber only knows about the event, after the notification has arrived. If the notification is lost, the users would not know about this. Thus, the ability to guarantee the delivery of notifications about events through the whole processing workflow is essential for a multitude of use cases (e.g., emergency response, prevention).
Furthermore, security aspects (e.g., for managing subscriptions and for ensuring that only authorised users receive notifications) need to be considered when enhancing spatial data infrastructures with event-driven data flows.
3.5. Meaningful Events
In addition, the semantics of event notifications are an important aspect that needs to be considered. For example, a formal description of the meaning of a specific notification (e.g., what does “alert” or “threshold exceeded” mean) would increase interoperability between different sources of event streams. Another important aspect is the provenance of event notifications. Usually, users would not only be interested in the notification itself (e.g., an alert message) but also in the underlying input data that have triggered the notification (e.g., the observed water level and weather observations that have triggered a flood warning). Thus, mechanisms are needed for providing the relevant underlying input data that have caused the transmission of a notification.
3.6. Integrating Event-Driven Data Flows into Applications
While the underlying event processing infrastructures may reach a high level of complexity, the usability of that infrastructure for users with potentially no technological background knowledge is of high importance. Thus, we consider a need for further research on how to enable users to define the events they are interested in or to manage event processing and notification workflows. At the same time, the end-user dissemination of data and events also. needs further investigation. Often applications intended for presenting data to end users do not rely on the original data directly but instead on rendered map representations. For example, typical portrayal services such as the OGC Web Map Service (WMS) are designed for delivering rather static map views to users. Thus, further work is necessary to develop ideas how dynamic event streams can be integrated into data visualisation components of applications. In the case of a portrayal service, it means that new maps would automatically be delivered by a push-enabled WMS instance as soon as updated map content is available. For example, in the case of map viewers for tracking moving objects (e.g., ships or airplanes), the view would be immediately updated as soon as a new map with new tracking data is available.
4. Application Scenarios
As the requirements and therefore also solutions for provisioning and processing near real-time data vary across the different domains of GI Science, we describe exemplary approaches developed within several domains that cover different types of application scenarios. However, eventing is not limited to these examples, but most of the solutions can be transferred to other domains with minimal effort.
To gather an overview of current activities and solutions, the authors organised and contributed to the workshop “Event-based Dissemination and Processing of Geospatial Information” conducted as part of the AGILE 2017 conference. As a result of this workshop, relevant projects, application scenarios and developments were selected and further elaborated as examples for inclusion into this paper.
The following sections present the selected solutions for different application scenarios that have been developed in the scopes of several research projects. We therefore start with introducing the overall use cases, followed by discussing the relevance of real-time data and event processing.
Table 1 provides an overview of the different application scenarios which are introduced in the subsequent subsections. The identification of specific gaps concludes each of the individual sections.
4.1. Delivery and Monitoring of Environmental Observation Data for Events of Interest
Providing meaningful real-time information becomes a more important pillar in several areas of environmental monitoring. Ranging from air quality threshold monitoring to the detection of oil spills, the time-critical interpretation of one or more phenomena is the main task of event-driven architectures in this application domain. This section provides an overview on architectures developed in a set of research projects which all build upon the same design principle.
4.1.1. Architectural Approach
For an event-driven architecture in the environmental monitoring domain, the Sensor Web concepts play an important role. The OGC Sensor Observation Service (SOS) is one central component, providing capabilities to manage and provide time series for in-situ observations and measurements. One project building an architecture around this is AirSensEUR [
43]. Its goal was to design a low-cost open hardware IoT device (a “sensor shield”, see
Figure 3) with a Linux-based software platform for air quality monitoring. The overall objective of the platform is to simultaneously meet the legal requirements of two European Union Directives: (i) the Air Quality Directive with regards to the quality of observation data; and (ii) the INSPIRE Directive [
4] with regards to data download. The platform targets to measure the quality of ambient air (CO, O
3, NO and NO
2) at low concentration levels. This is achieved through a selection of sensors and a transparent and open data-treatment process. The latest version of the device is extended to measure Radon, CO
2 and particulate matter.
The transfer of data from the sensor shields is handled by the transactional profile of the
SOS implementation. Observations are pushed in a regular interval to the SOS server. Subsequently, a post-processing through an artificial neural network is applied to ensure a high level of measuring quality. The
Helgoland web client, as well as a smartphone app developed within the MYGEOSS project [
44] consume data from the SOS. The smartphone app provides a notification service based on: (i) exceedance of air quality thresholds as defined in the EU Air Quality Directive; and (ii) spatiotemporal vicinity of the users to a given sensor shield. These notifications are derived from the time series data through interaction with the
Sensor Web REST API.
In addition, in the ocean sciences community, several projects within the European Horizon 2020 framework address the need for event-driven data dissemination approaches for environmental observations. The NeXOS project [
45] aimed at the development of new sensing technologies in combination with an interoperable web-based data exchange infrastructure. Many sensors deployed in the NeXOS infrastructure deliver a significant amount of in-situ observation data. While the archiving of these data streams is one important scientific requirement, the detection of relevant events within these streams is another aspect. For example, a hydrophone is capable of performing acoustic underwater measurements. These measurements can subsequently be used for detecting marine mammals which are recognisable as certain specific patterns within the acoustic data. An event-driven dissemination of such detection events will be used for notifying scientists as soon as interesting, new data are available.
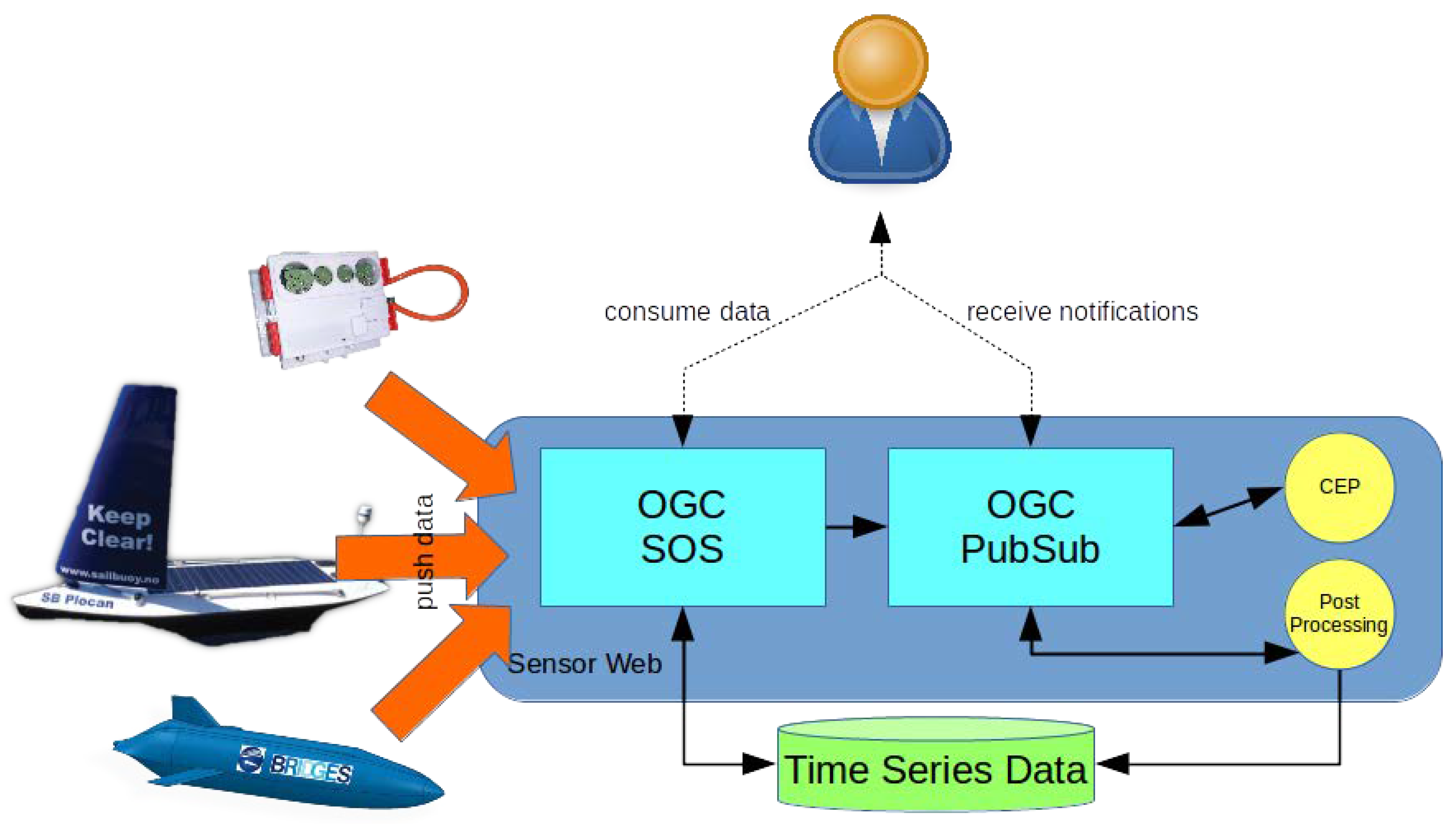
A second aspect that is relevant in the oceans research community is the event-driven dissemination of observation data collected by autonomous sensor platforms such as gliders. Often such platforms operate in very remote areas of the world so that the transmission of data can become a cumbersome task—a situation which is well-known in many applications of IoT devices. In the case of remote devices acting in the open oceans, cellular networks are not available and data have be transferred via satellite links. Thus, it is desirable that scientists are provided with an approach to request the automatic and immediate delivery of data about certain user-defined events (e.g., observation of properties beyond a given threshold or specific (critical) operating status data of the platform) while the large volume of all measured data is recovered later on when the platform has reached the shore again. The BRIDGES project [
46] aims (among other goals) at a system architecture to address such use cases (see
Figure 4).
In comparison to the above, the NoiseCap (
http://essi-lab.eu/noisecap) citizen science experiment developed a customised architectural approach. Based on the outcomes of the Energic-OD project (
https://www.energic-od.eu/), NoiseCap focusses on determining the reliability of commercial cell phones in estimating indoor noise pollution. The system builds on the free and open-source Noise-Planet (
http://noise-planet.org/) scientific toolset for environmental noise assessment, which includes the NoiseCapture Android application, developed within Energic-OD and allowing users to measure and share their noise environment. Each noise measurement is annotated with its location and can be displayed in interactive noise maps, within the application and on the Noise-Planet portal. NoiseCap focuses on air traffic noise, which is quite well-characterised and identifiable in indoor settings. Besides, this choice improves the reproducibility of the results. Hence, the experiment targets the specific group of citizens living nearby the airport of Florence, Italy.
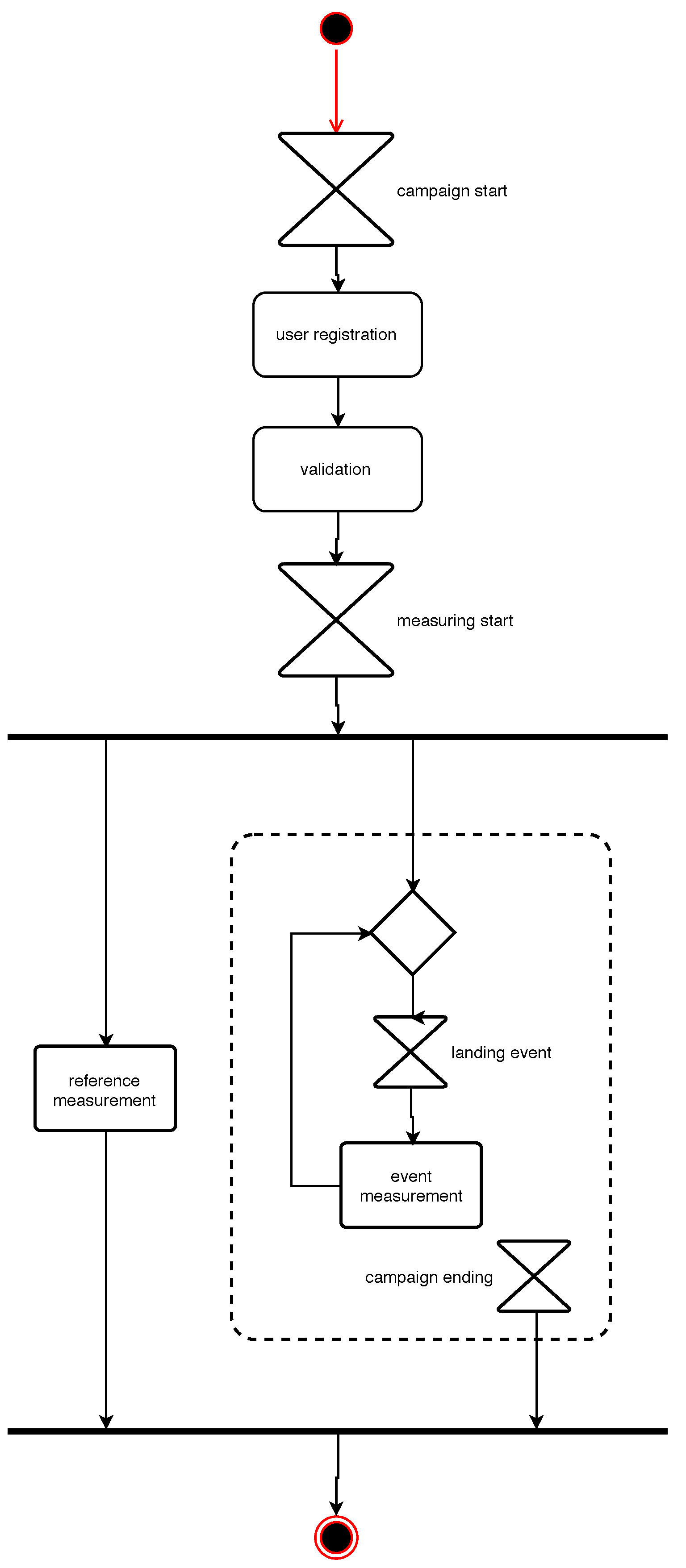
User participation in NoiseCap is on a completely voluntary basis. In particular, participating citizens are free to choose whether to measure a given landing event. Since the measurement protocol requires some preparation (e.g., turning off the television and such), the researchers overseeing the experiment (for an illustration of the activities see
Figure 5) have quickly realised the importance of notifying each user with a personalised message, at least a few minutes before the passage of an aircraft over her/his measurement spot (specified by the user during registration). Such a “notification service” has been implemented leveraging ADS-B Mode S data. An ad-hoc procedure analyses the Mode S records to identify aircrafts approaching the airport of Florence. The trajectories are then tracked subsequently. When a trajectory matches a specified landing pattern, the service notifies the subscribers with a personalised message providing an estimated time of the overflight.
4.1.2. Lessons Learned
The AirSensEUR project implements an eventing layer in a non-standardised manner while the NeXOS and BRIDGES projects propose an approach based on OGC PubSub [
18]. All three initiatives have identified gaps which need to be solved before a stable deployment is possible. This comprises, on the one hand, the need for more lightweight interfaces (i.e., REST/JSON) instead of XML—due to the remote locations and transmission limitations—and, on the other hand, a common approach that allows users to define the events they are interested in (i.e., event filters). Furthermore, a need for user-friendly applications to manage event subscriptions and an interoperable approach for defining event filters were identified as future requirements.
The implementation of the NoiseCap experiment has highlighted a substantial lack of free and open standards and solutions for processing spatial time series, such as ADS-B Mode S data, to identify events and apply event pattern matching. Therefore, transferring the developed system to a different geographic area would require substantial adjustments to the underlying analysis of aircraft trajectories. A standardised approach to filter raw ADS-B data based on an area of interest (e.g., based on GeoMQTT or PubSub) could help to develop similar applications in a sustainable manner. In addition, the lack of support for client-side standards led to the use of proprietary solutions (e.g., Telegram-based push messages) for notifying the volunteers.
4.2. Risk Identification and Notification for Dams and Dikes
Real-time information and the identification of specific events play a central role in the field of risk monitoring and early warning systems. In addition to phenomena measurements, simulation is a key asset in the system architectures. The timely provision of inputs for such simulations therefore is an important goal and can be achieved by utilising event streams. On the other hand, the results of a simulation model can also be materialised as a stream of events on its own. In the following, we provide architectural insights into the context of two independent use cases.
Sea dikes and estuarine dikes embody the main coastal defence structure in Germany and protect the low-lying areas against flooding. Dike failures in these areas may affect millions of people and economic values, which are worth protecting by monitoring the dikes and alerting in time. However, today’s early warning systems for dike failures are based exclusively on water level forecasts and do not consider other parameters such as wind, waves, currents, heavy rainfalls or the condition of the dike structure itself. In the case of simultaneously-occurring adverse events, dikes may fail before the design load is reached. A real-time warning system for dike failures has been established in the context of the EarlyDike project (see [
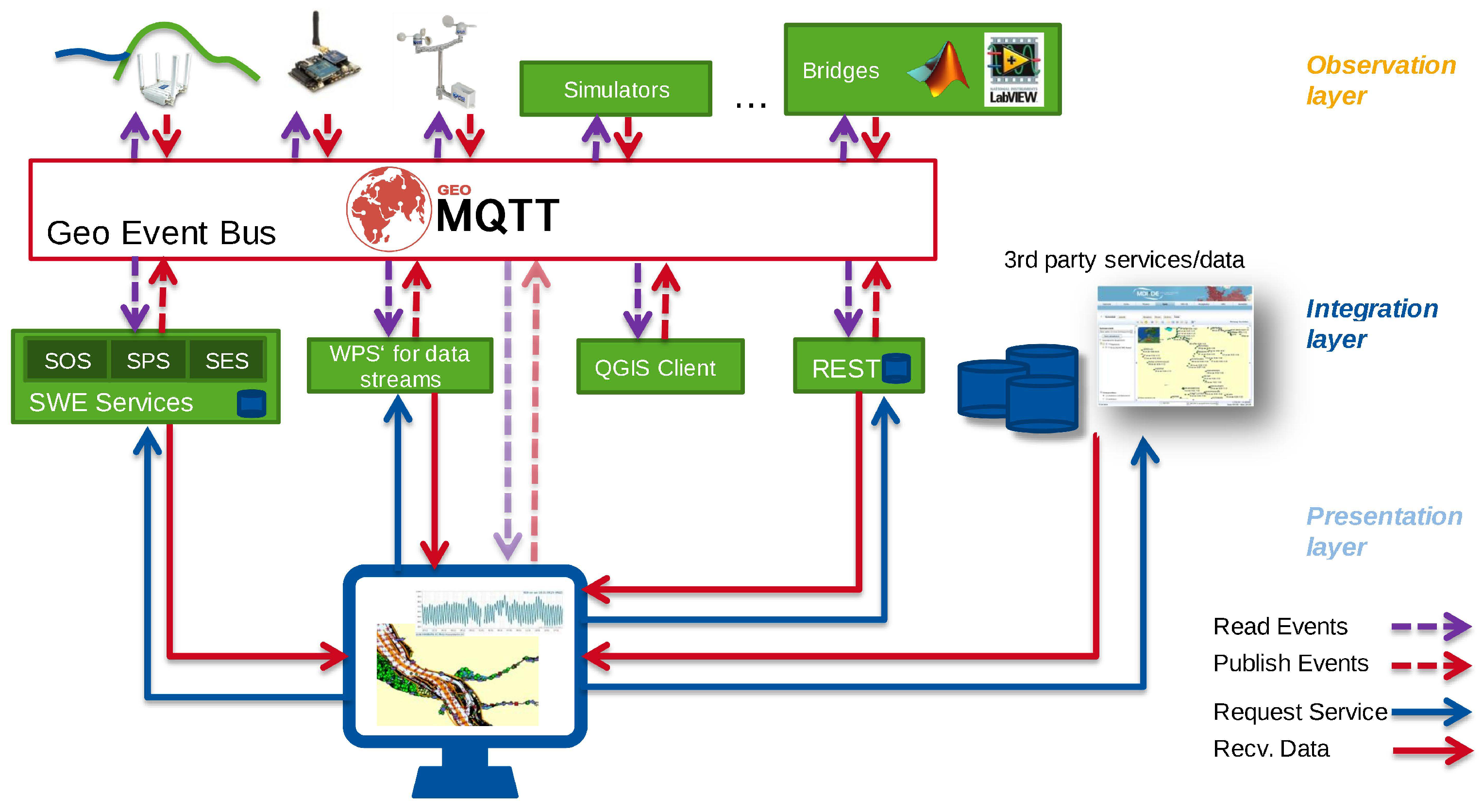
47]) which combines the detection of such different events. The system stands on three pillars: simulation of the environmental impacts by forecasting storm surges and wave loads, monitoring the condition of the dike itself by deploying new sensor technologies to measure the moisture penetration and the deformation and, finally, simulating the extent of a flood in case of a dike failure.
In analogy to sea dikes, river dams are critical infrastructure and require continuous monitoring with various observations. Although safety monitoring systems are available at these structures, there remains a residual risk of failure. Potential damages associated with dams usually stem from the failure of the structure due to overtopping, seepage water flow, and deformation. A critical dam failure may claim lives and cause massive material damage. To further minimise the residual risk, measures from different sources must be combined and analysed to extract maximum information. In the research project TaMIS, an already existing set of core SDI components has been complemented with additional spatial time series and analysis components to form a dam information system [
48]. One of the core requirements and complementing modules of such a system is an eventing module that detects low level events, e.g., threshold violations or sensor failure and communicates detected events to a responsible person.
4.2.1. Architectural Approach
The system architectures developed for sea dikes, river dams and urban infrastructures all share a common technological baseline. The backends are based on a sensor and spatial data infrastructure (SSDI), which follow the concept of the Sensor Web and, therefore, utilise OGC standards to make the time series data of the simulations and the sensors accessible [
49]. In the EarlyDike project, the sensor platforms and the simulations publish their measured or generated events with lightweight IoT protocols since they are adapted to resource-constrained environments. Especially the GeoMQTT protocol (see
Section 2.4.2) is used to establish a geo-event bus to interconnect sensors, simulators and the SSDI (see
Figure 6). To connect the SWE service layer the geo-event bus adopts concepts of the Sensor Bus by Bröring et al. [
50]. The geo-event bus ensures the deliverance and provisioning of real-time spatiotemporal events and data in time-sensitive architectures such as early warning systems.
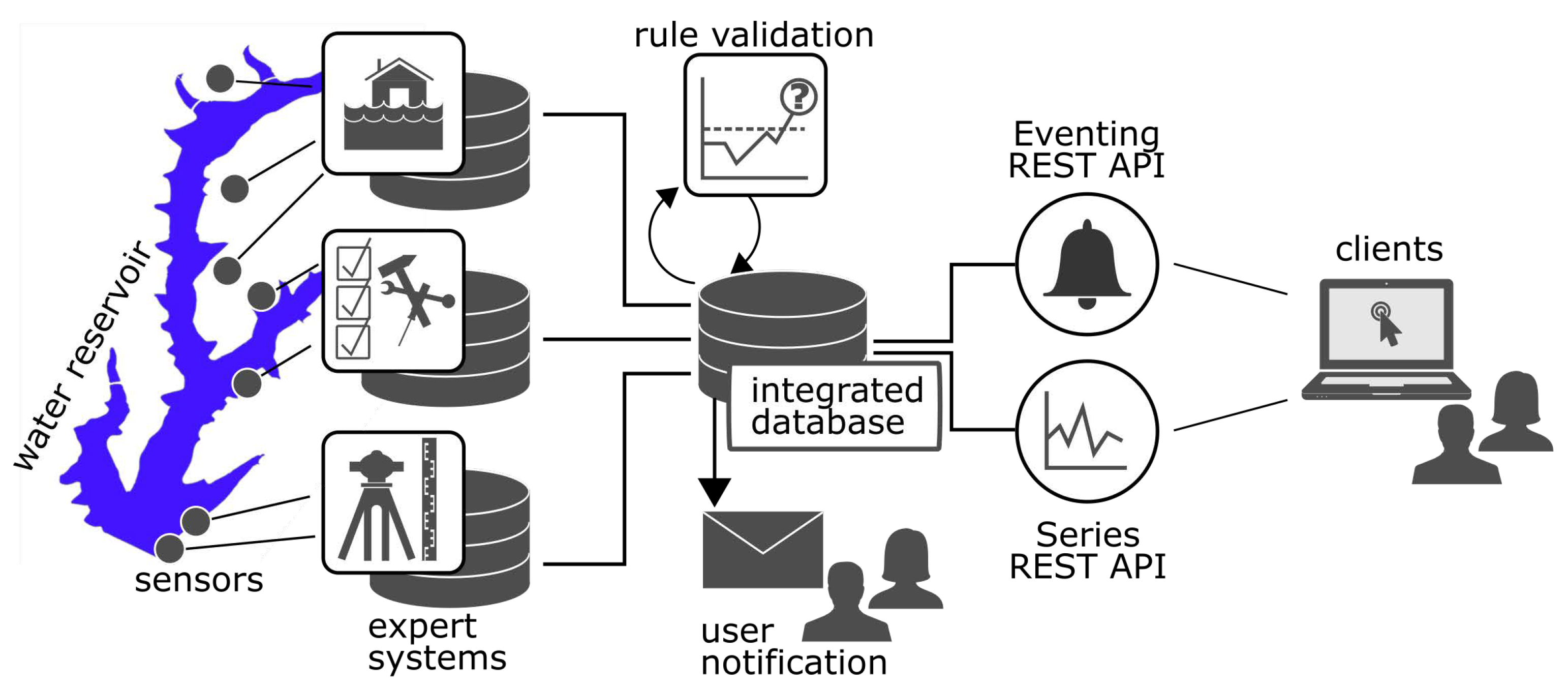
The dam monitoring system developed in the TaMIS project enhances the Sensor Web standards with a lightweight data access layer. The Sensor Event API adopts elements of the OGC PubSub standard [
19]. It serves a set of predefined rules, detected series events and allows a user to subscribe for a rule of a particular time series. The Sensor Web REST API (
https://github.com/52North/series-rest-api) is based on the OGC Sensor Observation Service Standard [
52] and introduces the time series object as a new element into the Sensor Web Enablement framework. The time series object is crucial to get explicit references among Sensor Web REST API and Sensor Event API.
The eventing module validates incoming observations against a set of threshold rules through database triggers when adding them to a harmonised spatial time series database schema. Stored events are sent via email to subscribed users in regular intervals. To make events accessible, a web service has been developed that adopts concepts from the OGC PubSub Standard and provides a JSON/REST API.
Figure 7 sketches the system’s architecture.
In the context of river dam monitoring, where processes are of slow characteristic, early access to reliable severe weather warnings is helpful to start dischargement in a water reservoir. Besides real-time event pattern matching the developed dam monitoring system accesses severe weather warnings from a Web Feature Service instance of the Deutscher Wetterdienst (German Meteorological Office). Predefined filters (location and topic) extract those weather warnings that are of interest for the monitored structures.
4.2.2. Lessons Learned
During the EarlyDike project, missing solutions for emitting spatiotemporal events by low-cost IoT devices and for filtering these events spatially and temporally were identified. This is essential for the project’s aims since dikes which protect the hinterland are widespread along the coastline. Because of this gap, the MQTT protocol was extended to spatiotemporal filtering capabilities (see
Section 2.4.2). However, neither a standard for spatiotemporal data streams nor a domain-specific language for event-driven pattern matching (e.g., as described in
Section 3.1) exists. Additionally, the integration of spatiotemporal data streams in traditional GIS Software is still lacking. Coupling standardised spatiotemporal data streams in GIS software has high potential to improve spatial analysis and allows for real-time operations.
One gap within the TaMIS eventing application is the implicit linkage among eventing rules and observation streams (time series). The eventing rules in TaMIS observe threshold overshoots and undershoots of time series. A robust linkage within the web service layer among an eventing rule and a time series is crucial for the eventing logic to work robustly. However, this linkage is currently solved merely implicitly at the web service layer and has to be configured explicitly in a client application. In the future, this explicitness needs to be transferred to the web service layer.
4.3. Early Detection of Hazardous Events in Urban Environments
The proliferation of heterogeneous urban sensors and volunteered geographic data (e.g., from crowd-sourcing) provides novel data-driven methods for emergency response and early detection of hazardous events. Challenges are the combination of these massive real-time data streams from urban sensors and the common reasoning on these heterogeneous data formats. As an example, a traffic loop detector provides a different spatiotemporal granularity than a video camera or a Twitter post, but all data sources may contain useful insights on one particular congestion or flooding event in a smart city.
The European FP7 project INSIGHT [
53] focussed on the intelligent synthesis and real-time response using heterogeneous data streams. The goal was to gain situation-awareness and perform crisis response based on heterogeneous sensor data streams. Thus, several event detection tasks were addressed by the consortium and a special architecture for spatiotemporal event detection has been proposed.
4.3.1. Architectural Approach
The proposed architecture introduced by the INSIGHT project (
http://www.insight-ict.eu) [
54] has been inspired by the TechniBall system [
55] and follows the Lambda architecture design principles for Big Data systems [
56]. A sketch of the architecture and the interconnection among the components is presented in
Figure 8, a comparison to other event processing frameworks can be found in [
11]. Every data stream is analysed individually for anomalies. In this detection process, different functions (e.g., clustering, prediction, thresholds, etc.) on the data streams can be applied. The resulting anomalies are joined at a round table. A final Complex Event Processing component allows the formulation of complex regular expressions on the function values derived from heterogeneous data streams. The predictions comprise future predictions of sensor values [
57], but also regression at unobserved locations [
58].
In the succeeding VaVeL project (
http://vavel-project.eu), the architecture of the INSIGHT project is reused and the application focuses on urban sensor data streams which are combined to gain situation-awareness. One of the project goals is to provide a multi-modal trip planner for citizens that incorporates predictions and extracted events to avoid delays. Thus, for example, tram delays are predicted [
60], and these predictions are incorporated in the OpenTripPlanner framework (
http://www.opentripplanner.org) to provide route suggestions that avoid delays.
4.3.2. Lessons Learned
Utilising real-time values and predictions for situation-awareness faces some problems, which are listed in the following.
Utilisation: Using these real-time predictions in a routing framework causes performance issues, we thus improved the applicability of existing transfer pattern algorithms towards dynamic costs [
61].
Proactive control: If any person would follow our route recommendations, we would cause novel unexpected traffic congestions at unexpected places. Indeed, utilising a prediction for a control decision modifies the distribution of the observed data and makes the prediction model invalid. A common approach towards this problem is bandit feedback learning. In [
62], the reinforcement learning algorithms is applied to the problem of traffic control. As a result street network performance was improved.
Life-long systems: A real-time system has to cope with a changing environment. In route planning, e.g., one may not rely on the availability of a certain pathway. Thus, we tackle this problem by a distributed online mapping method [
63] to identify obstacles and free areas in real-time.
4.4. Triggering Processing Based on the Publication of Observation Data
Often, geospatial applications rely on the execution of spatiotemporal models in order to determine or predict the distribution of specific properties. One example for such an application is the calculation of pollutants within the public sewage system in case of heavy rainfall events, as it is performed by the COLABIS project (
https://colabis.de). Another example is the WaCoDiS project (
https://wacodis.fbg-hsbo.de), which aims at the identification of element input in water courses and dams based on the combination of in-situ and remote sensing data.
Although both of these projects deal with different thematic questions, they share a common requirement: The execution of models and analysis algorithms in order to detect certain properties, as soon as updated input data are available. In the case of the COLABIS project, this concerns the availability of radar-based rainfall data: based on the updated radar data, the latest rainfall data can be used for updated flood model runs that predict the distribution of pollutants in the sewage system. In the case of the WaCoDiS project, the corresponding data analysis algorithms shall be executed as soon as new remote sensing data are available that fulfil certain quality requirements (e.g., no cloud coverage, etc.).
Thus, both projects would benefit from an automated trigger as soon as new suitable data are available so that new processing workflows can be initiated.
4.4.1. Architectural Approach
Both of the above mentioned projects are still works in progress. Within the COLABIS project, currently a time-based trigger is used. As the time interval in which radar updates are available is approximately known, this information can be used for triggering the workflow execution in regular intervals. However, for further optimisation in case of irregular availability of data, the COLABIS workflow would benefit from an event-based approach as it is currently developed in the WaCoDiS project.
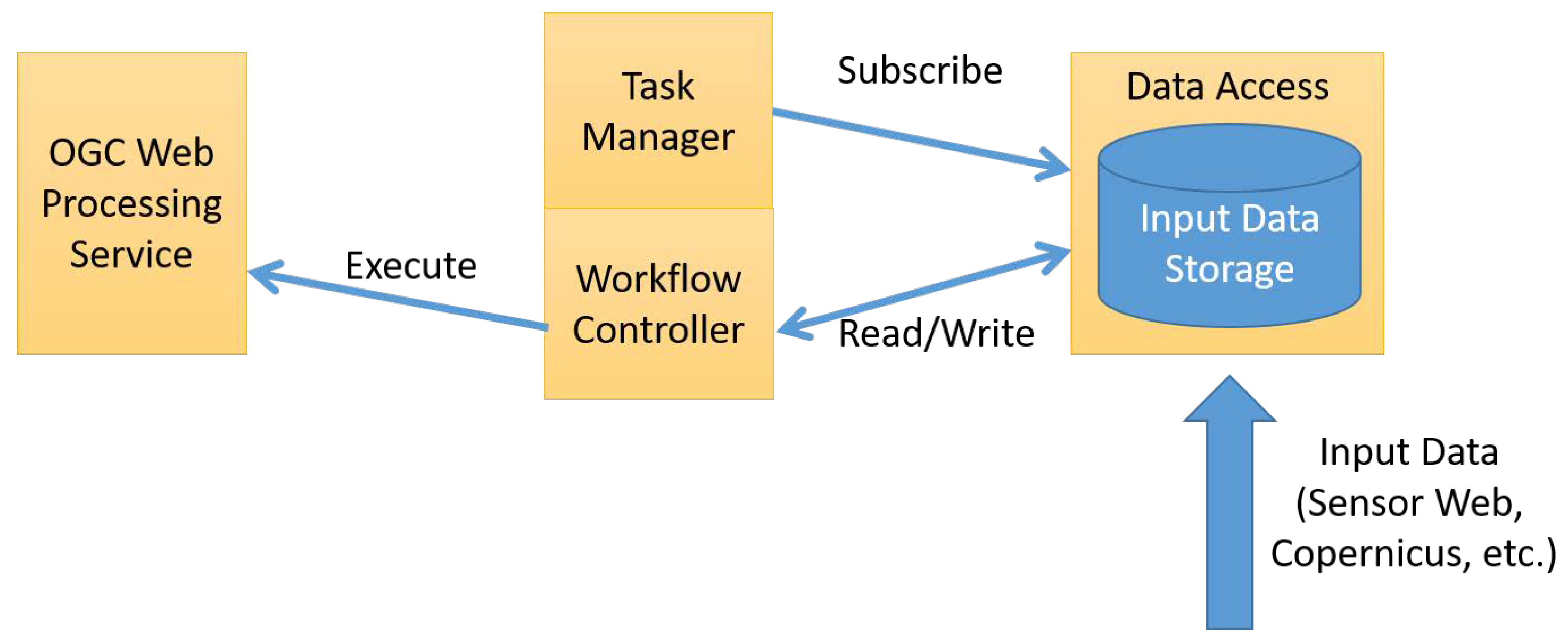
Within the WaCoDiS project, the workflow partially outlined in
Figure 9 is followed. In this case, it is necessary to start a process chain as soon as new remote sensing images are available. For this purpose, all incoming data such as Sensor Web observations or metadata about Copernicus satellite images are stored in a central repository. A task manager holds several subscriptions on this repository, so that it is notified as soon as new data are available, which matches the conditions defined for the subscriptions. As soon as all necessary data for a workflow run are available, a workflow controller reacts on the information about new available data and triggers the execution of the corresponding data analysis processes on OGC Web Processing Service instances.
This publish/subscribe architecture enables automatic process/model execution as soon as the conditions for a new run are fulfilled. As a result, this approach ensures the timely delivery of new information as soon as updated input data are available. Currently, different approaches for enabling the publish/subscribe patterns within the WaCoDiS infrastructure are investigated. Besides the OGC PubSub standard [
22], mainstream IT technologies are also evaluated.
4.4.2. Lessons Learned
Currently, the presented workflow is still in development so that evaluation results are not yet available. However, in the near future, the presented workflow will be further refined and it is expected that follow-up publications will present a detailed analysis of this concept. Especially the WaCoDiS developments will make a contribution to enabling event-driven data flows in spatial data infrastructures, as outlined in
Section 3.3.
5. Discussion and Conclusions
The presented application scenarios and related projects (
Section 4) cover current research activities of the authors in specific domains. The illustrated architectural approaches could be translated to other domains where real-time spatiotemporal data also play an important role. Currently, new research activities are focussing on fields such as logistics, precision farming or Earth Observation that can build upon the outlined solutions. At the same time, the landscape that we outlined in
Section 2 illustrates the high diversity of approaches in the field of eventing in geo-information science. Recent research activities have also highlighted the challenge of event processing capabilities in the area of geospatial IoT architectures (see [
64]). This diversity and the related challenges in combination with the availability of sophisticated software solutions for stream processing evolve into a challenging research area. This is especially relevant in the context of IoT technologies, networks, and devices which promise to contribute an additional source of real-time data to spatial data infrastructures.
In
Section 3, we illustrated conceptual gaps which have been identified prior to the work carried out for the application scenarios. Some of the gaps have been (partially) addressed by the developed architectures (compare in
Table 1). Following the analysis of these architectures, we identified several related and also additional gaps. The commonly occurring issues that need to be tackled in the coming years to take full advantage of the uptake of eventing in GI Science are outlined below.
Inconsistencies between classic data access methods and event-driven approaches: The implementation of asynchronous client-server interaction is considered highly relevant to most geospatial application scenarios. Nonetheless, the analysis of existing SDIs shows that the majority of spatiotemporal data are provided either in a static way or via standardised web services. However, these web services rely on the request/reply pattern. In addition, the current OGC standard baseline is still mainly based on synchronous web service capabilities, which have insofar primarily addressed the request/reply model. As stated in
Section 2.1, while waiting for new data or events, a client polls the desired information. Consequently, this increases server load and network traffic and can also lead to the missing out on information or the introduction of significant delays for the client. These issues are accentuated when event occurrences are unpredictable, or when the delay between event occurrence and client notification must be small. The establishment of the publish/subscribe pattern could eradicate these shortcomings. It could be argued that a growing number of applications may benefit from an interoperable and uniform way of implementing event-driven architectures. Possibly, the transition to an event-driven SOA could see a parallel transition to an event-driven SDI, backed by some or all of the presented standards and solutions.
Heterogeneous approaches for defining event patterns: While the OGC PubSub standard aims at providing a common approach how to enable push-based communication patterns within SDIs, it does not address how the events that data consumers are interested in shall be described. Even though there were previous efforts to address this topic (e.g., the OGC Event Pattern Markup Language Discussion Paper [
65]), the way of defining event patterns is still mostly depending on the used technologies. However, to ensure full interoperability, the harmonisation of approaches for defining event patterns is also necessary. This would also comprise extensions of the OGC PubSub standard. An interesting field of work would be the addition of event stream processing capabilities [
65]. Stream processing goes beyond the capability of basic data filtering. It generates higher level information from raw data stream (e.g., event patterns such as “temperature < 20 followed by temperature >= 20”). This would allow the integration of concepts such as Complex Event Processing into the standard and could be realised as a dedicated event processing extension of the OGC PubSub standard.
Standardisation and corresponding support in established GIS software. At the moment, the integration of event-based communication flows in established GIS software is still a gap. Even though there are dedicated components such as Esri’s GeoEvent Server, the integration into typical desktop GIS is still missing, as it would require new concepts how to handle such information flows within the existing graphical user interfaces. At the same time, new lightweight, standardised solutions (e.g., based on REST and JSON) would be needed to allow the development of sophisticated client solutions. However, the availability of such lightweight interoperability standards is still a gap which needs to be resolved (potentially through faster, lightweight standardisation approaches). In this context, the definition of additional interface bindings and profiles for OGC PubSub delivery methods is an important task. To allow smooth and interoperable integration of OGC compliant Publish/Subscribe services, such profiles are crucial. The integration of modern and well-established technologies such as AMQP, MQTT and JMS with specific profiles is therefore a central goal.
Bidirectional integration of IoT devices in event-driven SDI: Until now, SDIs mainly deal with data but not with the devices delivering these data. However, the direct integration of IoT devices (e.g., resource-constrained platforms, sensors, actuators, and moving objects) would create new opportunities. On the one hand, this would open up a new dimension in SDIs by having IoT devices as direct sensors delivering live input about their environment. On the other hand, the bi-directional integration of IoT devices would also make it possible to define and execute specific sensing tasks or even interact with the environment.
Lack of semantic interoperability of geospatial events: At the moment, the semantics of events occurring an event-enabled SDI are not yet harmonised from a semantic point of view. In the future, it would be important to have common semantics for events (e.g., new IoT device registered in an SDI and threshold exceedance of detected values) to achieve full interoperability. At least for a common foundation of typical events, a dedicated vocabulary or ontology would be desirable.
In summary, it can be concluded that the integration of IoT devices and the enablement of event-based communication patterns would be a valuable enhancement of SDIs. While first relevant results are already available, there is still a broad range of challenges which need to be addressed before achieving the goal of event-driven spatial data infrastructures.

 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}