



Assessing the Transformative Potential: An Examination of the Urban Mobility Impact Based on an Open-Source Microscopic Traffic Simulator for Autonomous Vehicles

Abstract
:1. Introduction
2. Materials and Methods
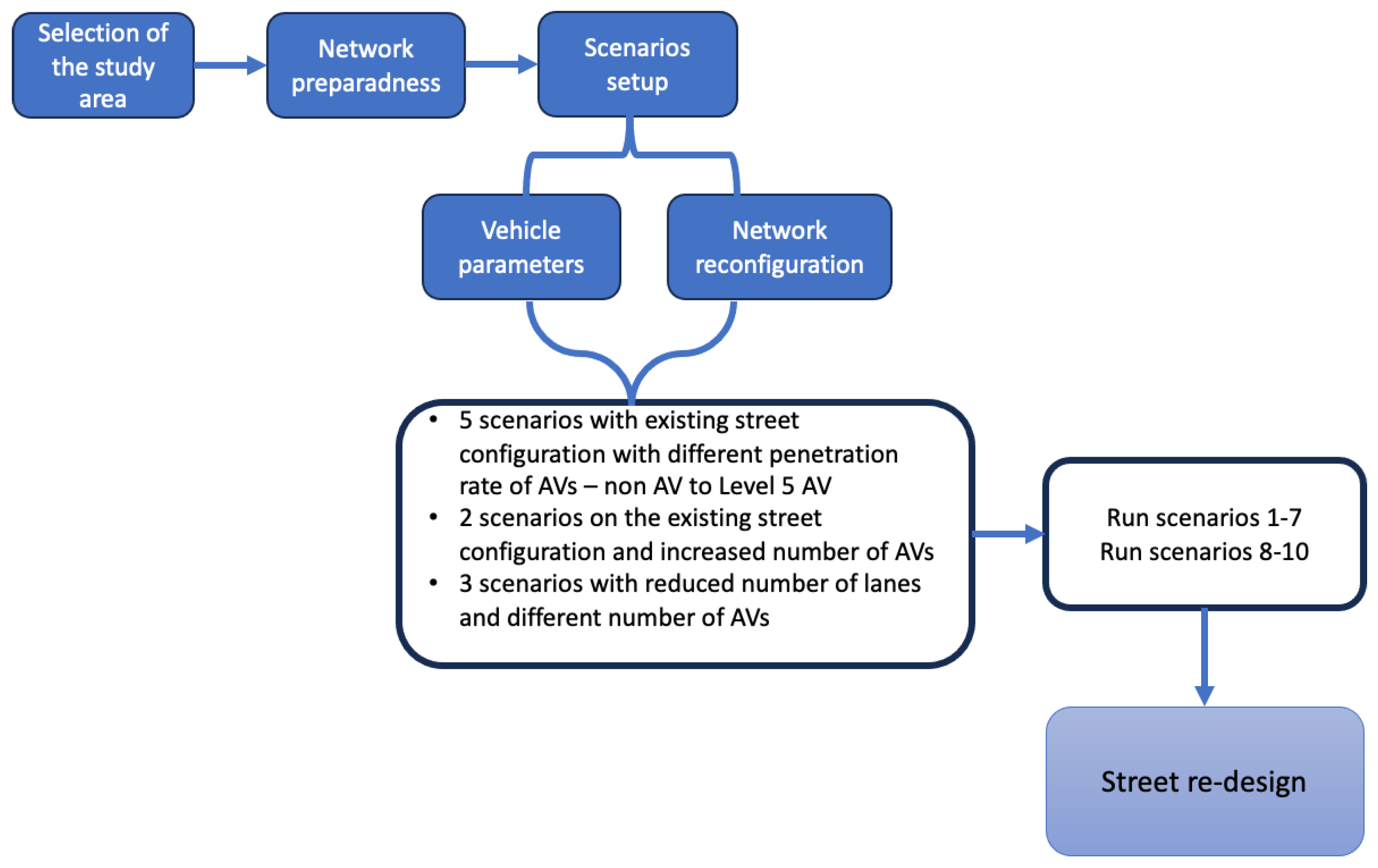
2.1. Methodological Approach
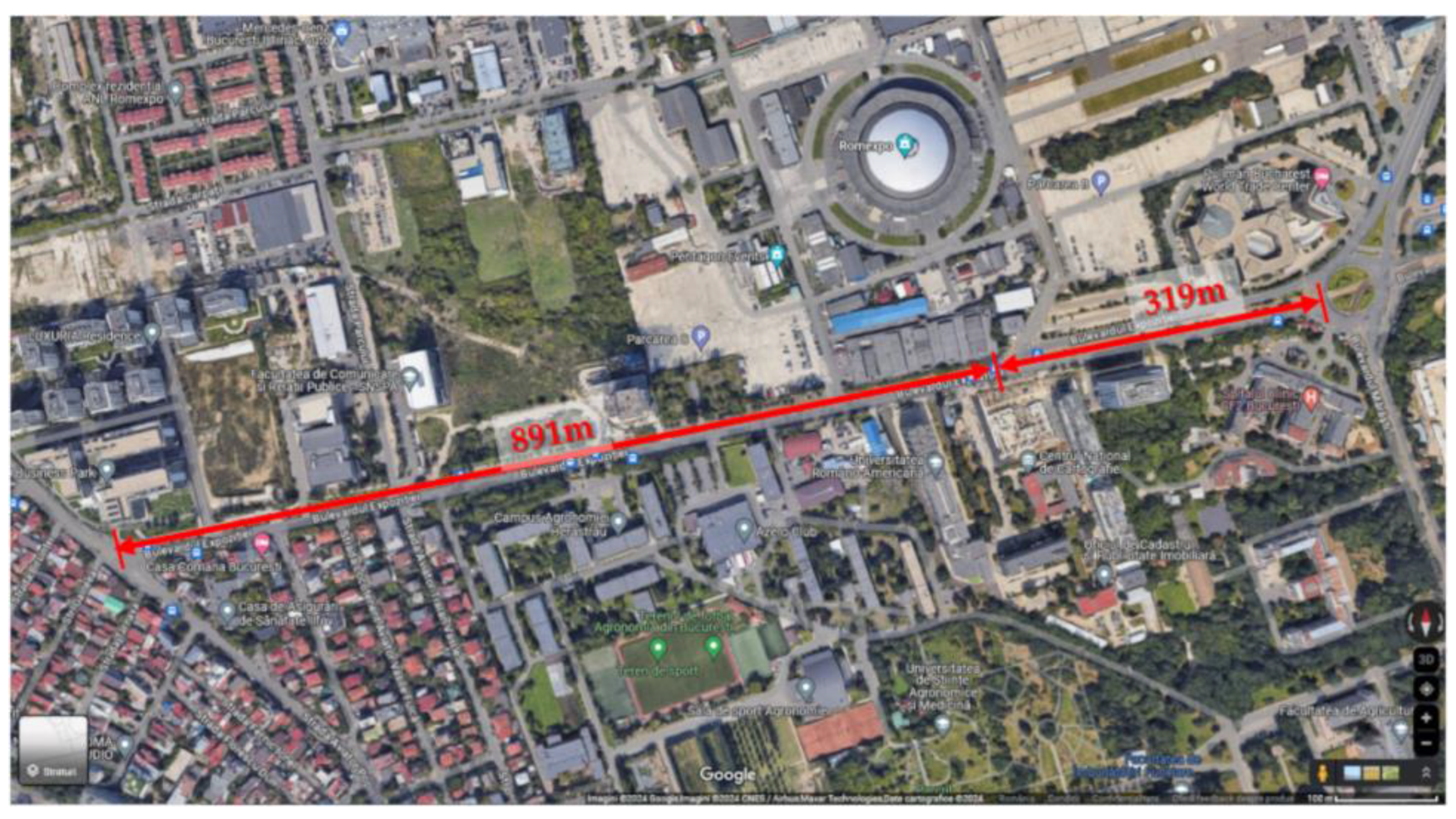
2.1.1. Study Area
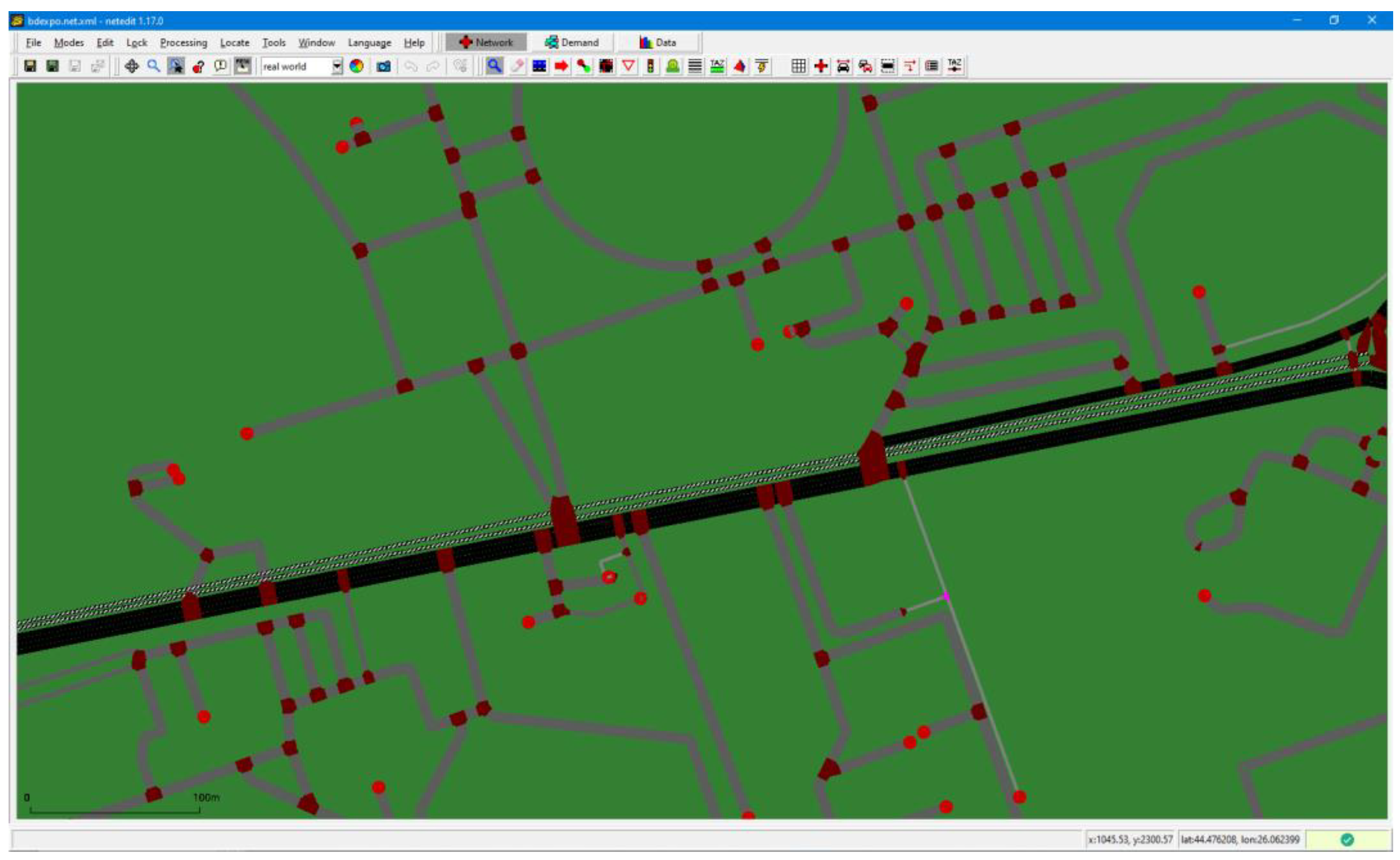
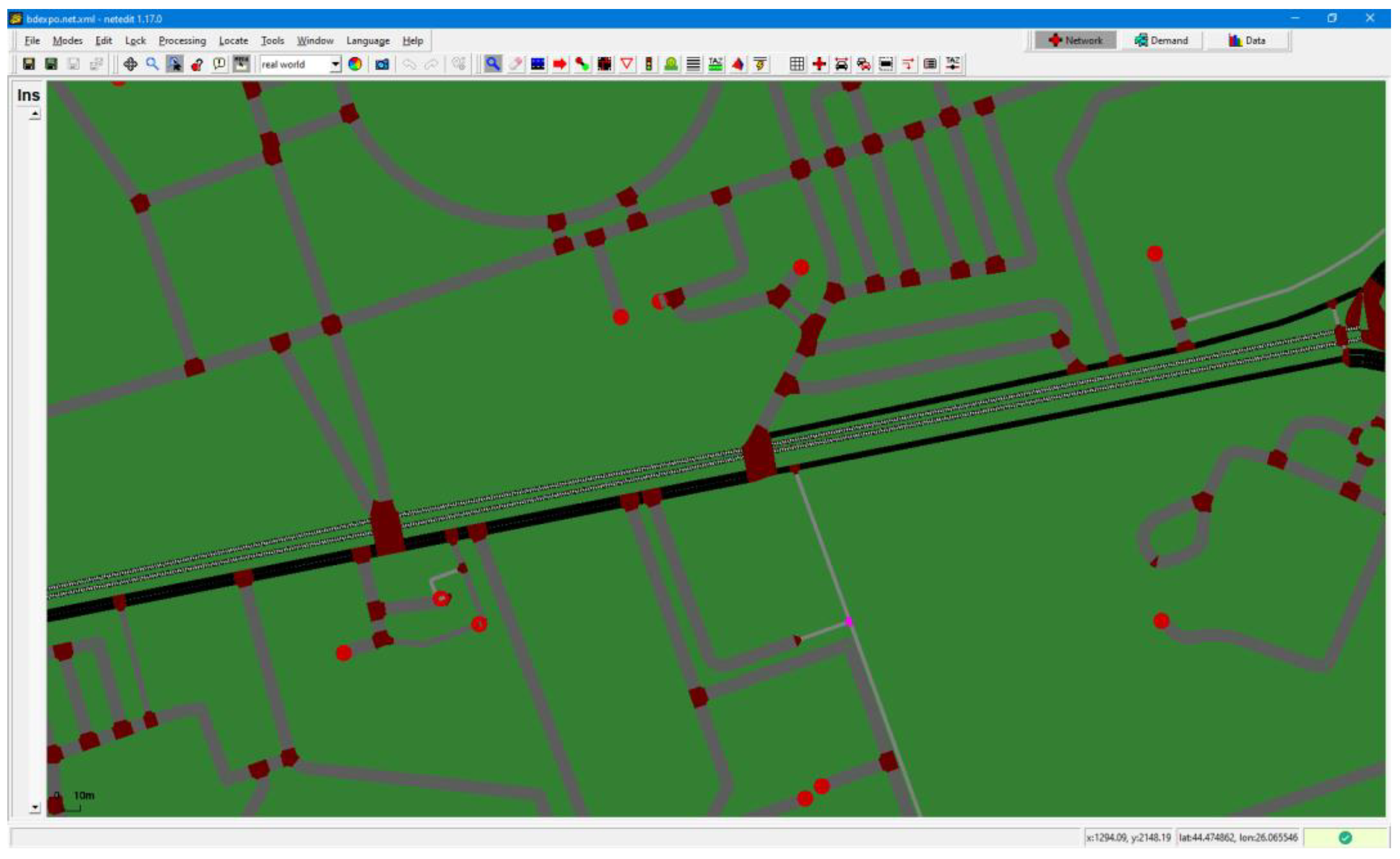
2.1.2. Network Preparedness
2.1.3. Scenarios’ Set-Up
2.1.4. Emission Modeling in SUMO
- ci = constant parameters specific to the vehicle type;
- v = speed;
- a = acceleration.
3. Results of the Simulation Using Different AV Market Penetration Scenarios and Discussion
3.1. Results of the Simulation Using Different AV Market Penetration Scenarios
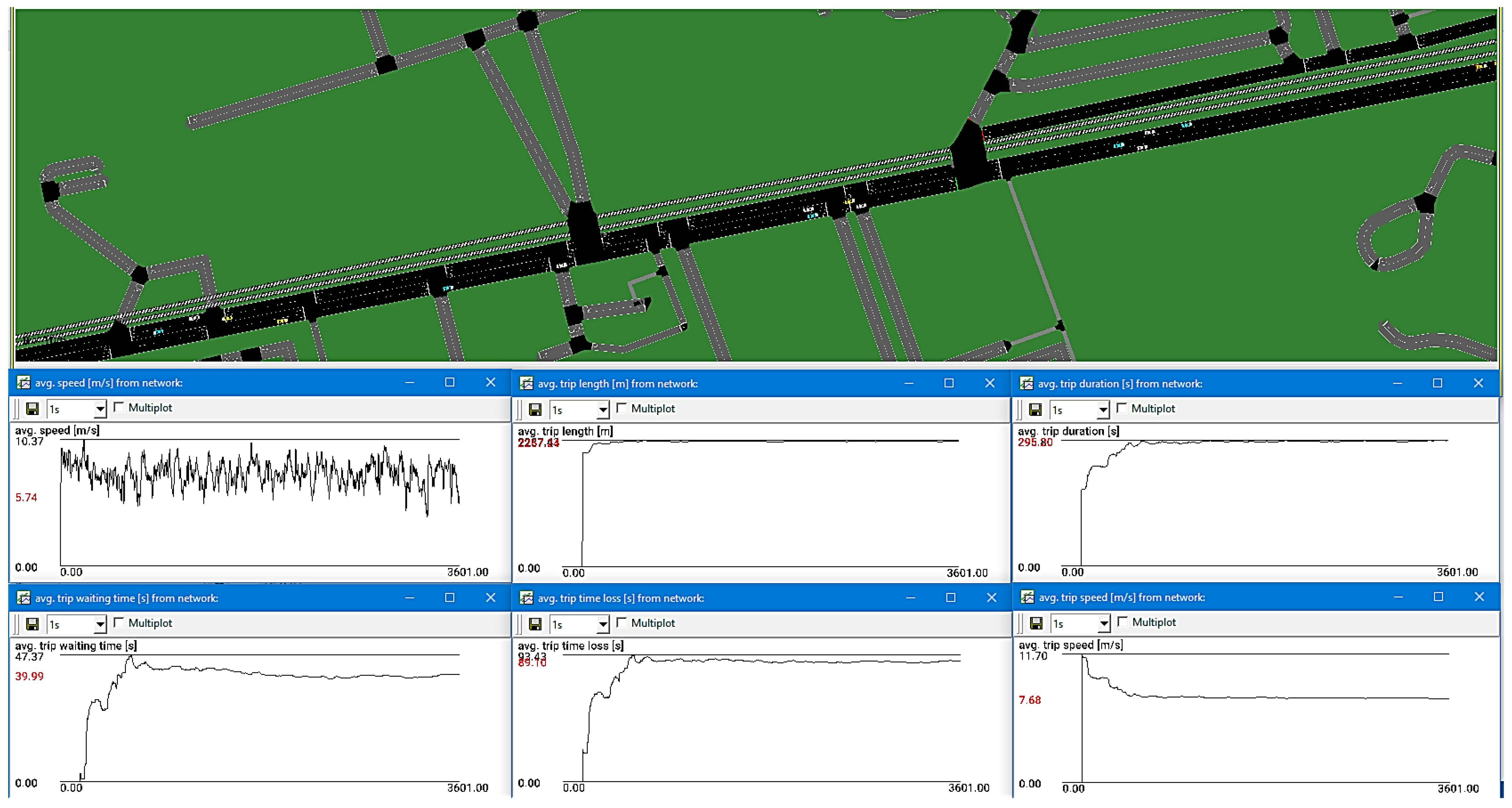
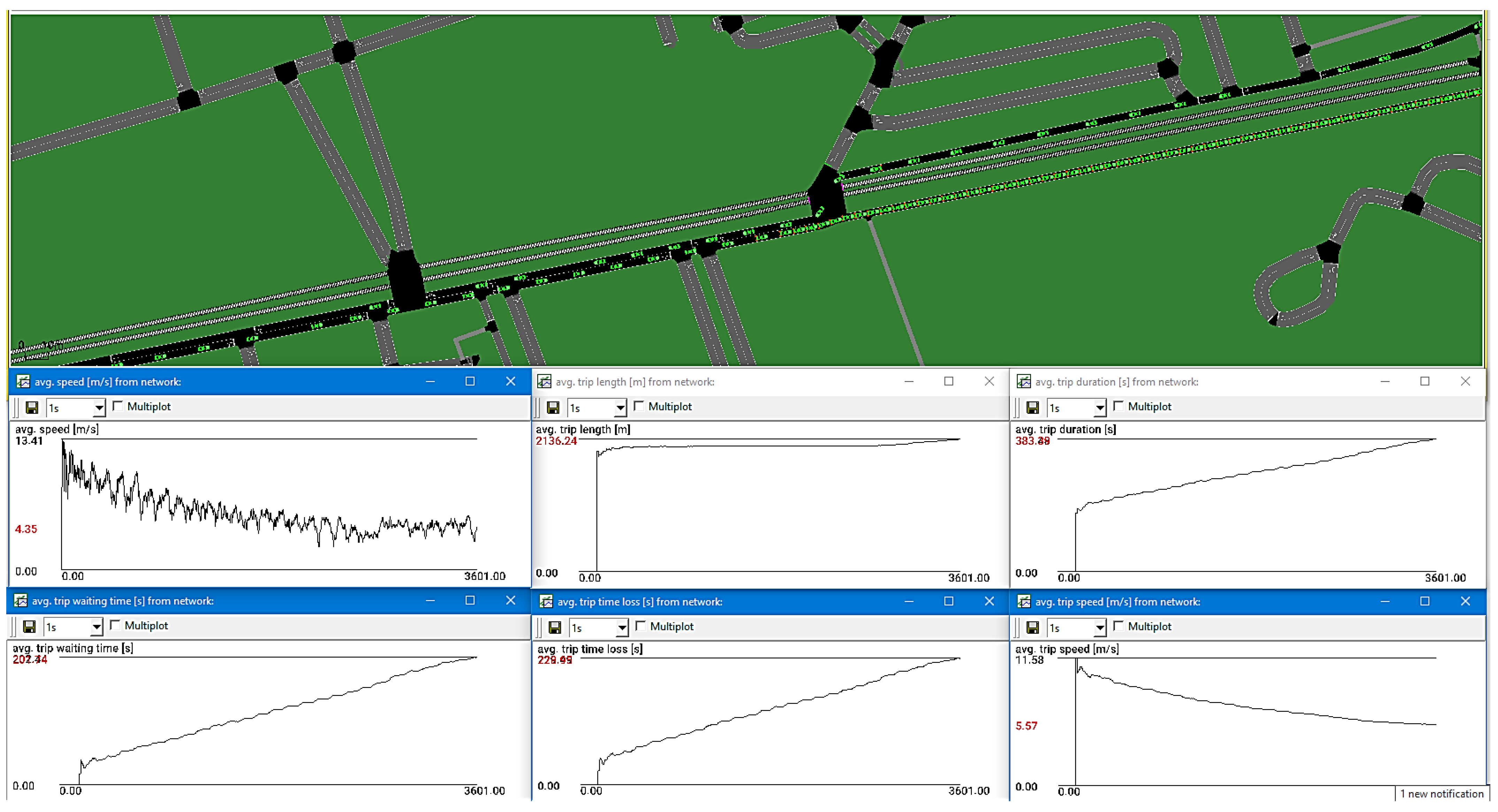
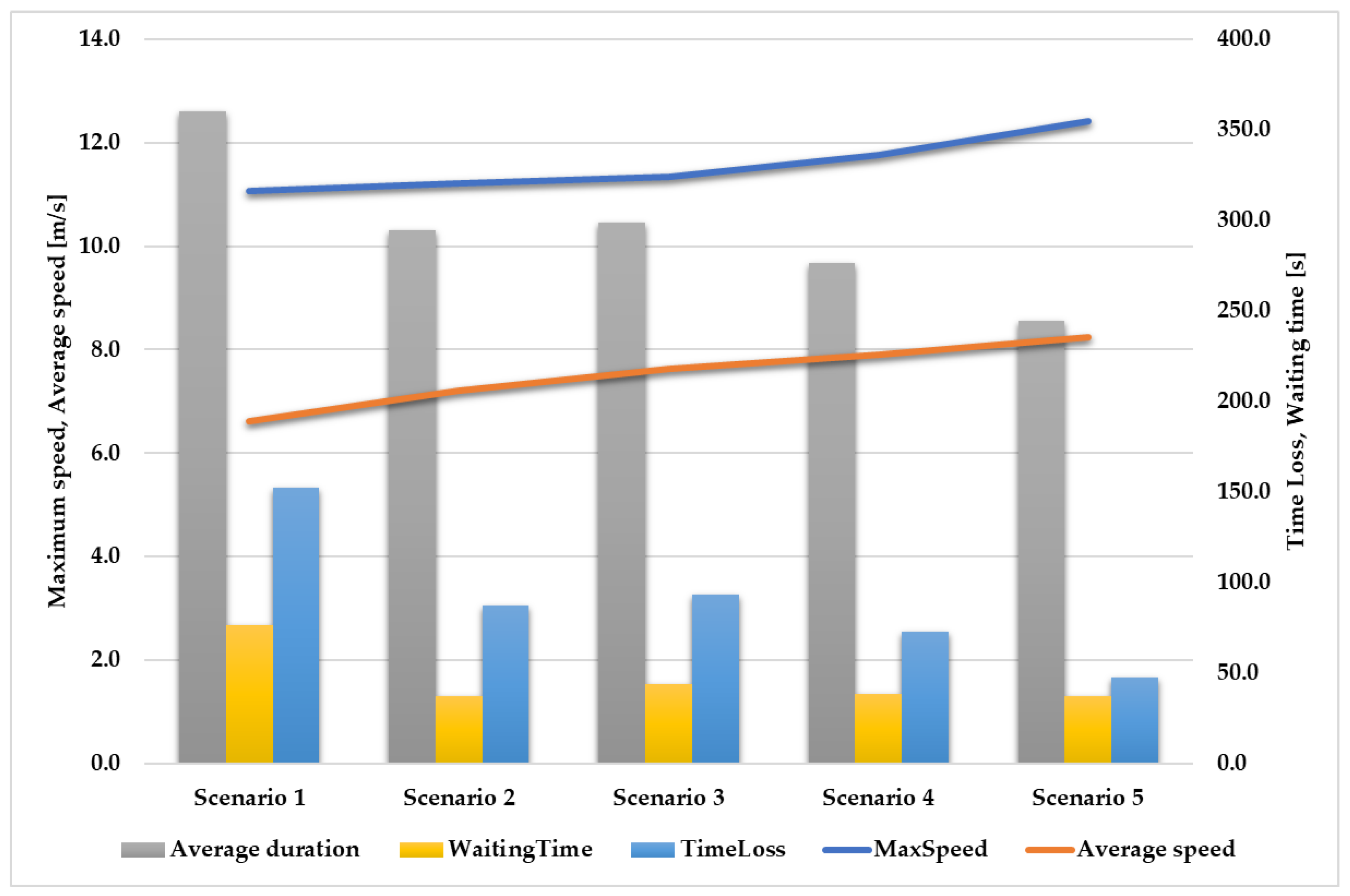
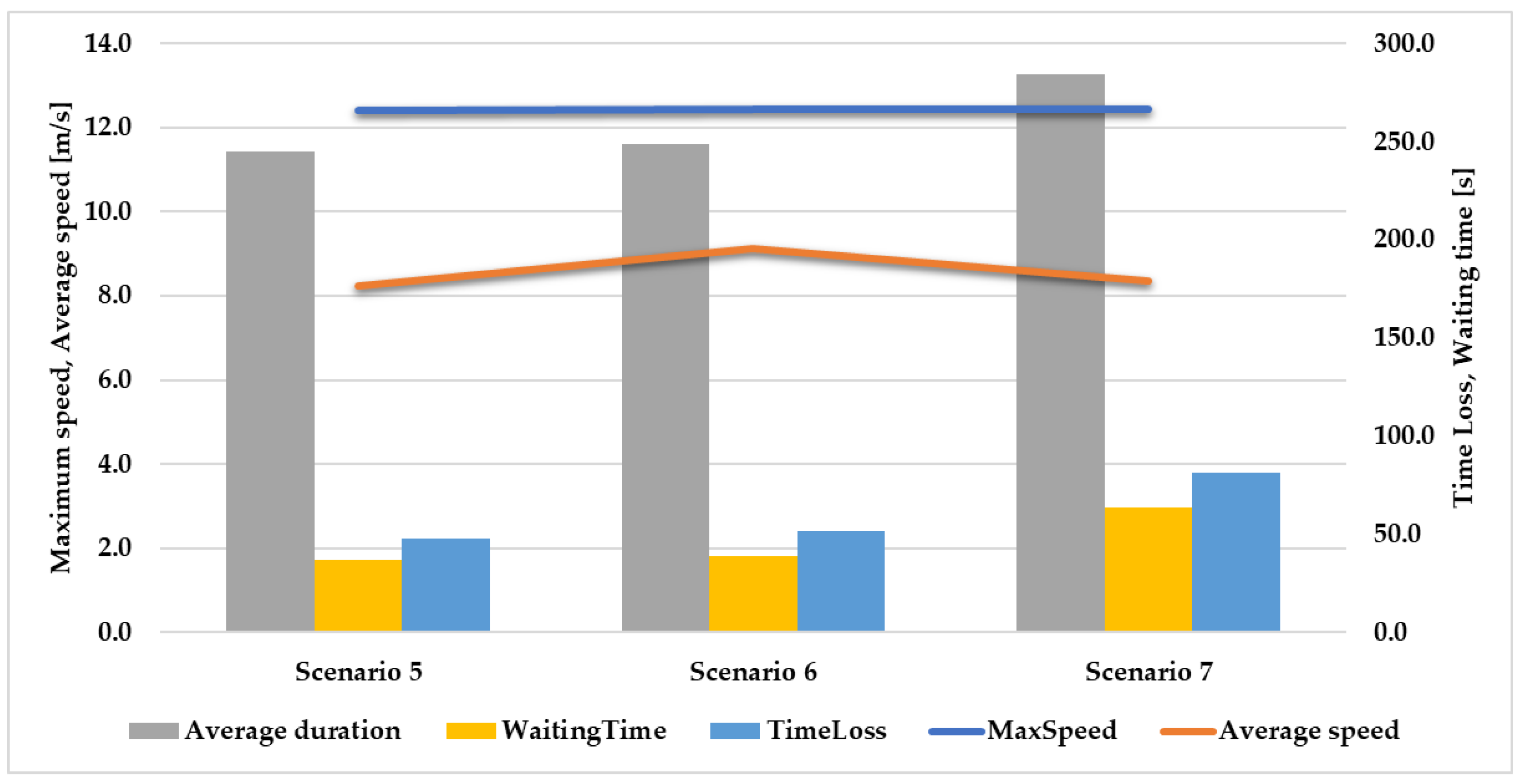
3.1.1. Traffic-Related Parameters
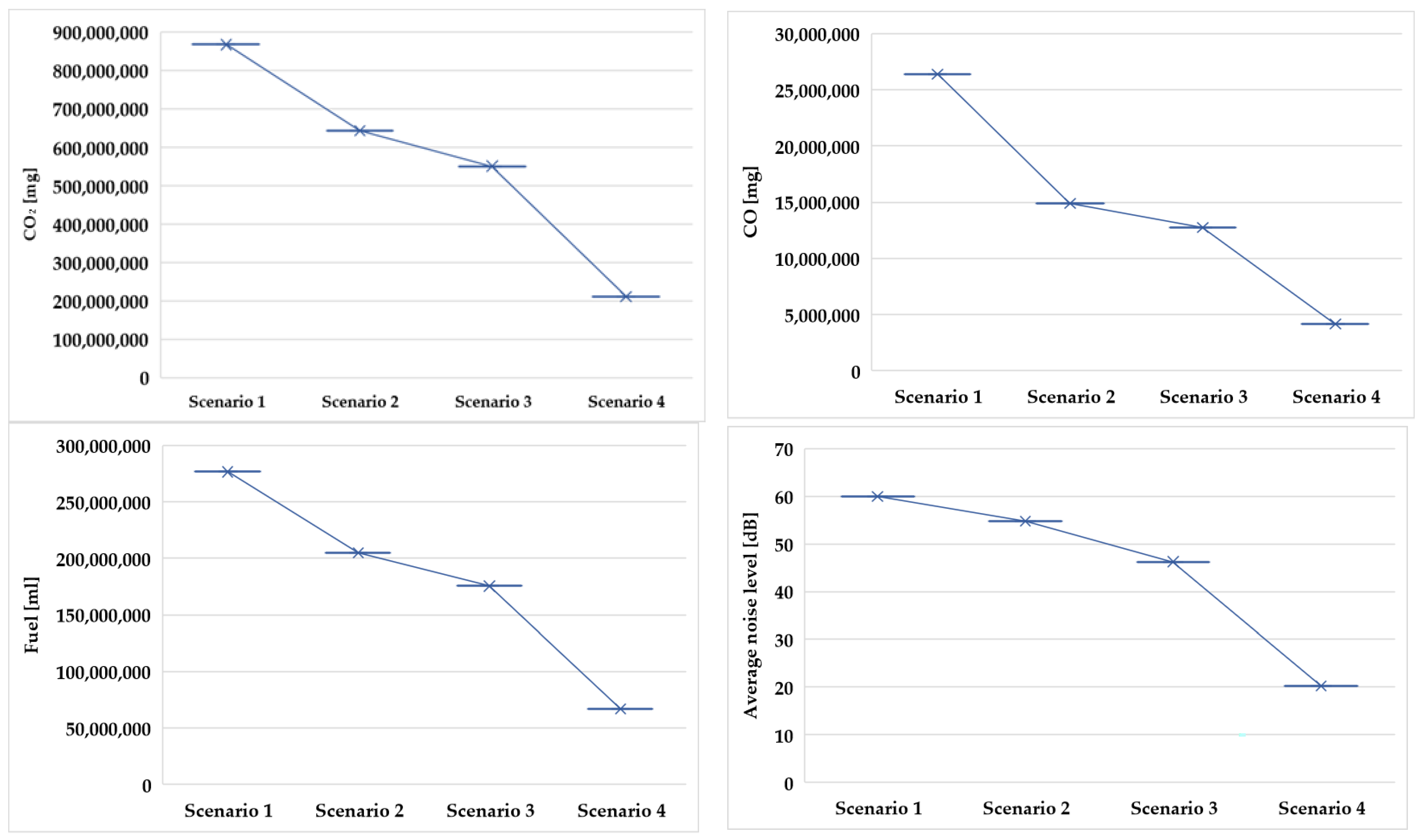
3.1.2. Emissions, Fuel Consumption, and Noise
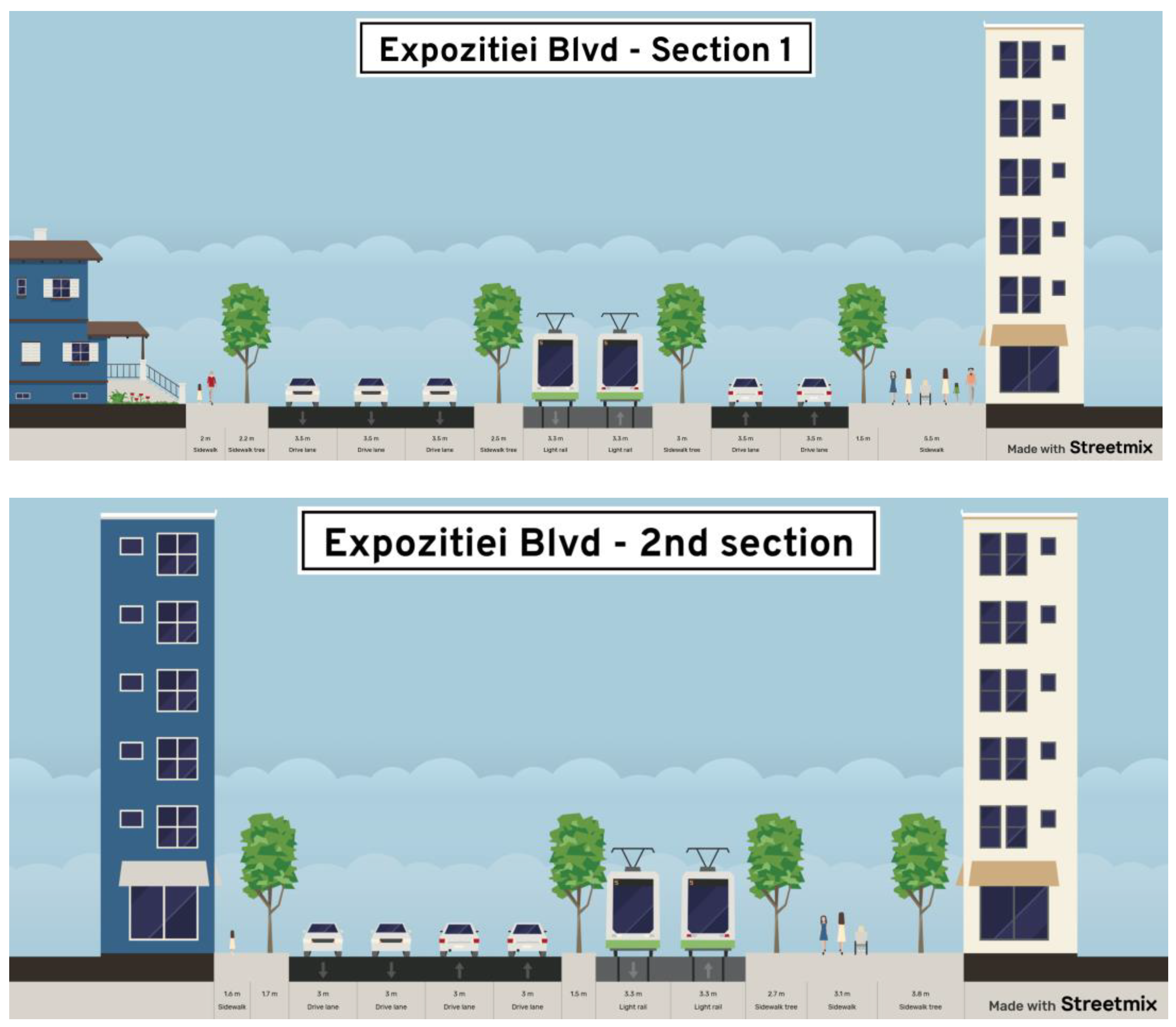
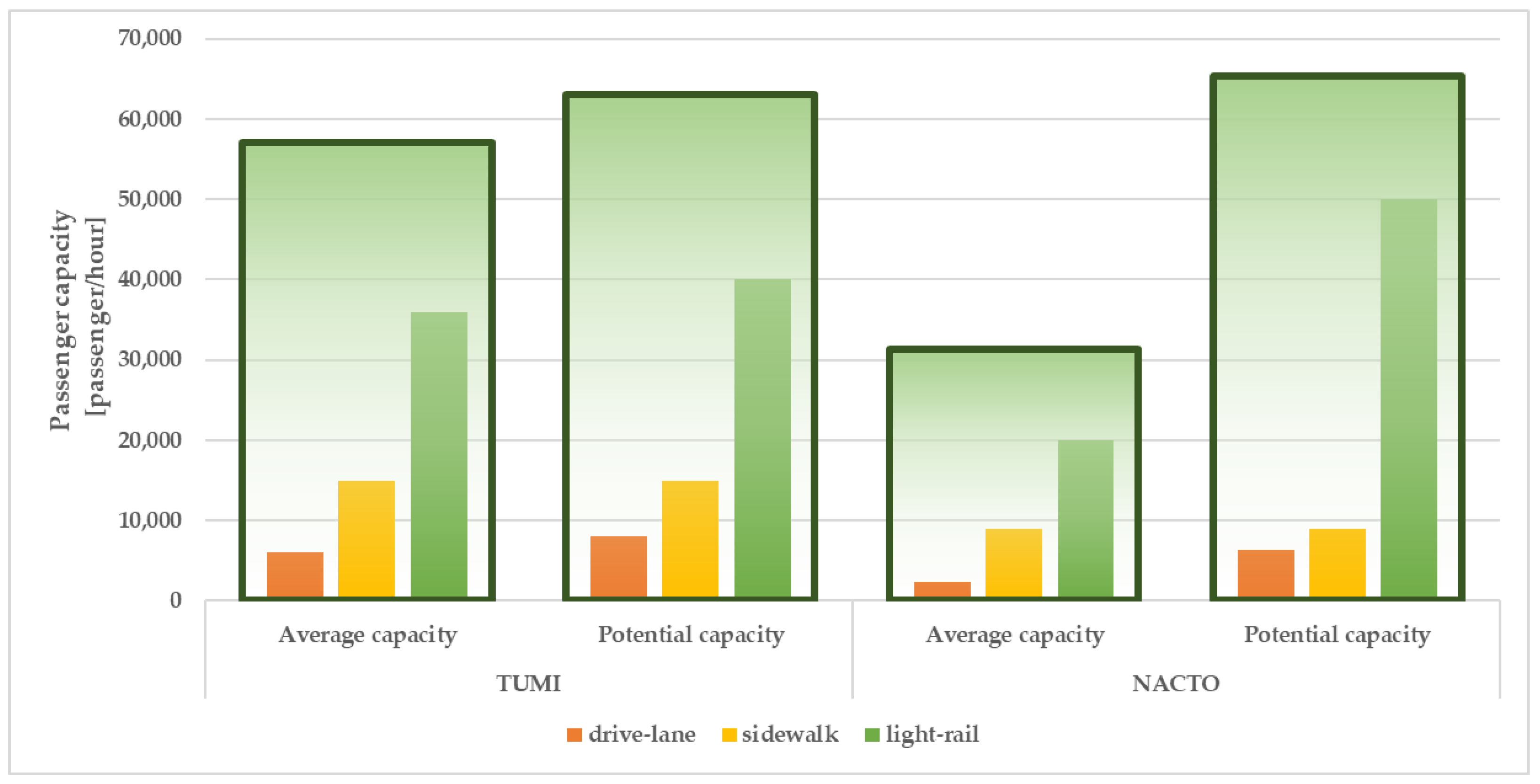
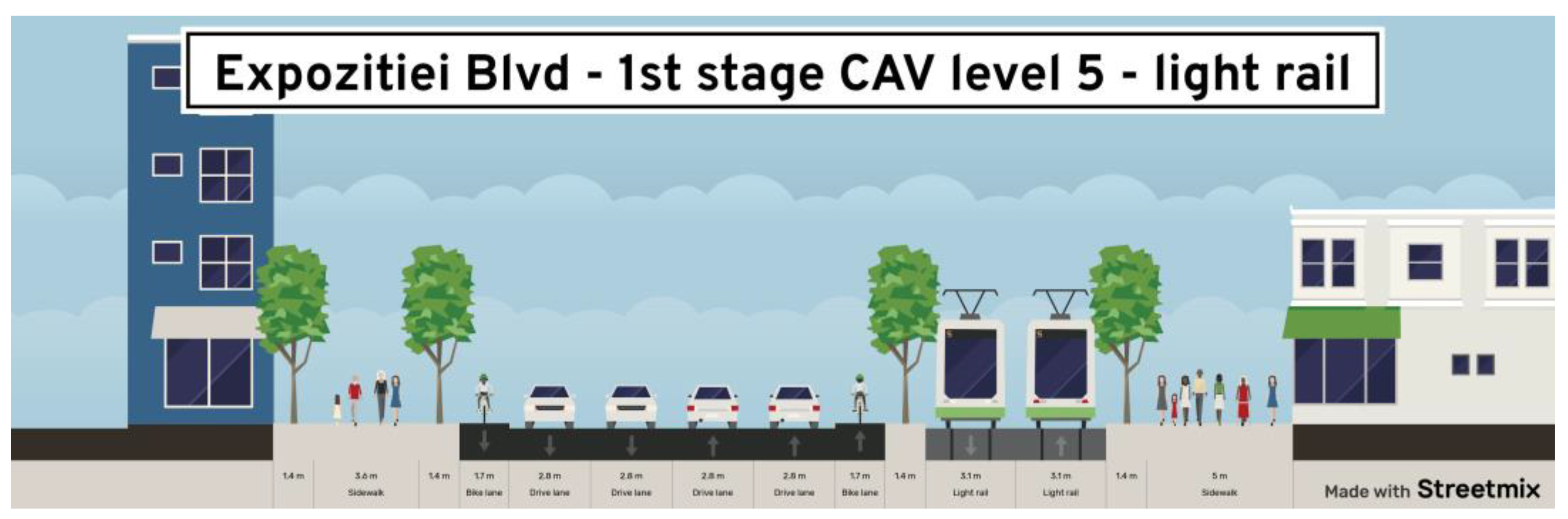
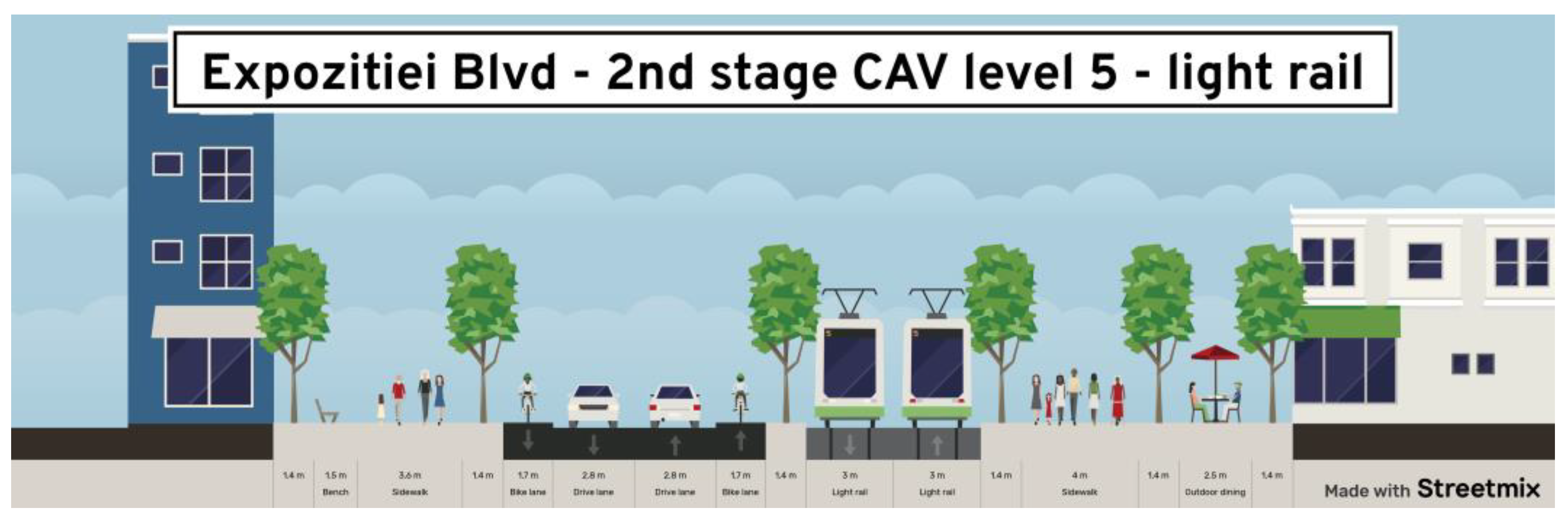
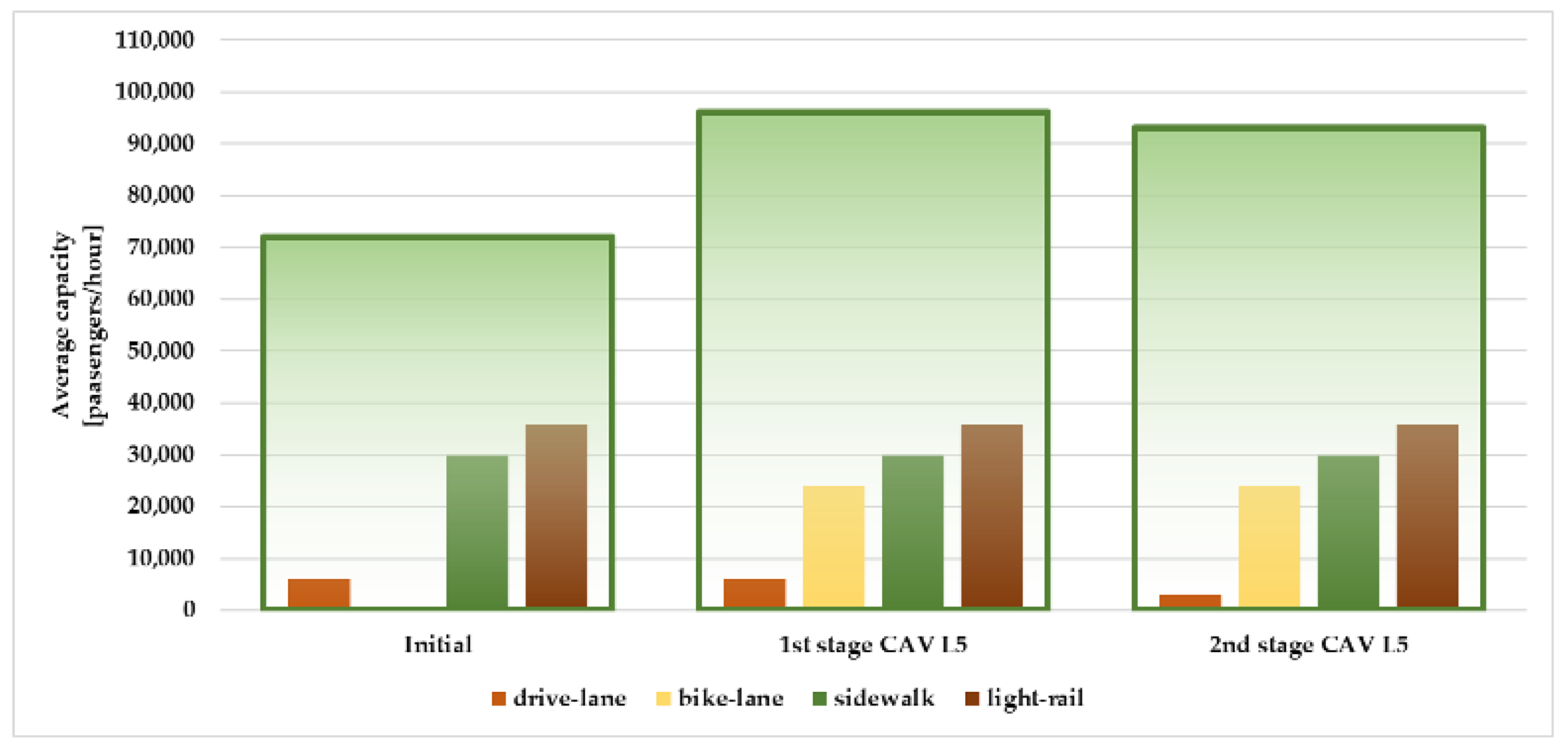
3.2. Street Redesign
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- J3016C: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles—SAE International. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 21 October 2023).
- ADAS&ME. Vision. ADAS&ME. Available online: https://www.adasandme.com/about-adasme/vision/ (accessed on 23 October 2023).
- IRT SystemX. 3SA. Available online: https://www.irt-systemx.fr/projets/3sa/ (accessed on 23 October 2023).
- Show-Project.EU. Available online: https://show-project.eu/ (accessed on 23 October 2023).
- Digibus Austria. Digibus® Austria. Available online: https://www.digibus.at/en/ (accessed on 23 October 2023).
- Capri Mobility. Available online: http://caprimobility.com (accessed on 23 September 2023).
- CoEXist. Working towards a Shared Road Network. Available online: https://www.h2020-coexist.eu/ (accessed on 29 October 2023).
- Assuring the Safety of Connected and Autonomous Vehicles. Connected Places Catapult. Available online: https://cp.catapult.org.uk/report/assuring-the-safety-of-connected-and-autonomous-vehicles/ (accessed on 23 October 2023).
- Oelgemöller, S. Startseite. Art-Forum. Available online: https://www.art-forum.eu/ (accessed on 23 October 2023).
- LivingLAPT. EIT Urban Mobility. Available online: https://www.eiturbanmobility.eu/projects/livinglapt/ (accessed on 23 October 2023).
- Ride2Autonomy EU Project Learning Connection—SUMMALab. Available online: https://summalab.nl/r2a/ (accessed on 23 October 2023).
- PAV, Interreg VB North Sea Region Programme. Available online: https://northsearegion.eu/pav/ (accessed on 23 October 2023).
- TRL|STREETWISE—Creating an Automated Personal Mobility Solution for London Commuters. Available online: https://trl.co.uk/projects/streetwise---creating-an-automated-personal-mobility-solution-for-london-commuters (accessed on 23 October 2023).
- Maven-Its.EU. Available online: http://www.maven-its.eu/ (accessed on 23 October 2023).
- Hi-Drive Deployment of Higher Automation. Available online: https://www.hi-drive.eu/ (accessed on 23 October 2023).
- CARAMEL—Artificial Intelligence Based Cybersecurity for Connected and Automated Vehicles. Available online: https://www.h2020caramel.eu/ (accessed on 23 October 2023).
- 5G-DRIVE—5G HarmoniseD Research and TrIals for serVice Evolution between EU and China. Available online: https://5g-drive.eu/ (accessed on 23 October 2023).
- Autopilot. Available online: https://autopilot-project.eu/ (accessed on 23 October 2023).
- Automated Driving Applications and Technologies for Intelligent Vehicles—AdaptIVe FP7 Project-Automated Driving Applications and Technologies for Intelligent Vehicles. Available online: https://www.adaptive-ip.eu/ (accessed on 23 October 2023).
- 5GCroCo. Available online: https://5gcroco.eu/ (accessed on 23 October 2023).
- Hadrian Project|Holistic Approach for Driver Role Integration and Automation Allocation for European Mobility Needs. Available online: https://hadrianproject.eu/ (accessed on 23 October 2023).
- AWARD H2020—Scaling Autonomous Logistics. Available online: https://award-h2020.eu/ (accessed on 20 October 2023).
- 5G-MOBIX. Available online: https://www.5g-mobix.com/resources/presentations/5g-mobix-5g-for-cooperative-connected-automated-mobility-on-x-border-corridors (accessed on 23 October 2023).
- ENSEMBLE|Platooning Together. Available online: https://platooningensemble.eu/ (accessed on 23 October 2023).
- ERTRAC Working Group “Connectivity and Automated Driving”. Connected Automated Driving Roadmap; European Road Transport Research Advisory Council: Brussels, Belgium, 2019; p. 56. Available online: https://www.ertrac.org/wp-content/uploads/2022/07/ERTRAC-CAD-Roadmap-2019.pdf (accessed on 16 August 2023).
- Litman, T. Autonomous Vehicle Implementation Predictions Implications for Transport Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2022; p. 48. [Google Scholar]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- What’s Next for Autonomous Vehicles?|McKinsey. Available online: https://www.mckinsey.com/features/mckinsey-center-for-future-mobility/our-insights/whats-next-for-autonomous-vehicles (accessed on 25 October 2023).
- Lutin, J. Not If, but When: Autonomous Driving and the Future of Transit. J. Public Transp. 2018, 21, 92–103. [Google Scholar] [CrossRef]
- Juliussen, E.; Carlson, J. Autonomous Cars: Not if But When; IHS Automotiv: Northville, MI, USA, 2014; p. 4. [Google Scholar]
- Farah, H.; Erkens, S.M.J.G.; Alkim, T.; van Arem, B. Infrastructure for Automated and Connected Driving: State of the Art and Future Research Directions. In Road Vehicle Automation 4; Lecture Notes in Mobility; Meyer, G., Beiker, S., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 187–197. [Google Scholar]
- Manivasakan, H.; Kalra, R.; O’Hern, S.; Fang, Y.; Xi, Y.; Zheng, N. Infrastructure requirement for autonomous vehicle integration for future urban and suburban roads—Current practice and a case study of Melbourne, Australia. Transp. Res. Part A Policy Pract. 2021, 152, 36–53. [Google Scholar] [CrossRef]
- Cucor, B.; Petrov, T.; Kamencay, P.; Pourhashem, G.; Dado, M. Physical and Digital Infrastructure Readiness Index for Connected and Automated Vehicles. Sensors 2022, 22, 7315. [Google Scholar] [CrossRef]
- Hirose, J. Digital Infrastructure Service Role and Functional Model for Urban ITS Service Applications. 11 August 2022. Available online: https://wwww.easychair.org/publications/preprint/cCnv (accessed on 5 October 2023).
- Kimmel, S.; Duran, A.; Robertson, J.; Vanderveen, M.; Wending, B. Physical and Digital Infrastructure for Connected and Automated Vehicles (CAV)—Code Framework; Canadian Standards Association: Toronto, ON, Canada, 2021; p. 52. Available online: https://www.csagroup.org/wp-content/uploads/CSA-Group-Research-Physical-and-Digital-Infrastructure-for-Connected-and-Automated-Vehicles-CAV.pdf (accessed on 21 June 2023).
- Crute, J.; Riggs, W.; Chapin, T.S.; Stevens, L. Planning for Autonomous Mobility; PAS Report; American Planning Association: Chicago, IL, USA, 2018; p. 84. [Google Scholar]
- Tengilimoglu, O.; Carsten, O.; Wadud, Z. Implications of Automated Vehicles for Physical Road Environment: A Comprehensive Review. Transp. Res. Part E Logist. Transp. Rev. 2023, 169, 102989. [Google Scholar] [CrossRef]
- Khan, A.R.; Jamlos, M.F.; Osman, N.; Ishak, M.I.; Dzaharudin, F.; Yeow, Y.K.; Khairi, K.A. DSRC Technology in Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) IoT System for Intelligent Transportation System (ITS): A Review. In Recent Trends in Mechatronics Towards Industry 40; Lecture Notes in Electrical Engineering; Nasir, A.F.A., Ibrahim, A.N., Ishak, I., Mat Yahya, N., Zakaria, M.A., Abdul Majeed, A.P.P., Eds.; Springer: Singapore, 2022; pp. 97–106. [Google Scholar]
- Harte, S. Reflective Measurement Systems RetroTek. 2016 Future-Proofing Road Markings. Available online: https://www.reflective-systems.com/future-proofing-road-markings/ (accessed on 28 September 2023).
- Duvall, T.; Hannon, E.; Katseff, J.; Safran, B.; Wallace, T. A new look at autonomous-vehicle infrastructure|McKinsey. In What Infrastructure Improvements Will Promote the Growth of Autono-Mous Vehicles While Simultaneously Encouraging Shared Ridership? McKinsey & Company: Chicago, IL, USA, 2019; p. 6. Available online: https://www.mckinsey.com/industries/travel-logistics-and-infrastructure/our-insights/a-new-look-at-autonomous-vehicle-infrastructure (accessed on 28 October 2023).
- Gerike, R.; Dean, M.; Koszowski, C.; Schröter, B.; Wittwer, R.; Weber, J.; Jones, P. MORE Deliverable D1. 2 Urban Corridor Road Design: Guides, Objectives and Performance Indicators. 2019. Available online: https://www.roadspace.eu/wp-content/uploads/2019/11/MORE_D1_2_FINAL.pdf (accessed on 23 May 2023).
- Dennis, E.P.; Spulber, A.; Sathe Brugerman, V.; Kuntzsch, R.; Neuner, R. Planning for Connected and Automated Vehicles. Technology Research. 2017. Available online: https://www.cargroup.org/publication/planning-for-connected-and-automated-vehicles/ (accessed on 28 October 2023).
- Tientrakool, P.; Ho, Y.C.; Maxemchuk, N.F. Highway Capacity Benefits from Using Vehicle-to-Vehicle Communication and Sensors for Collision Avoidance. In Proceedings of the 2011 IEEE Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 5–8 September 2011; pp. 1–5. [Google Scholar]
- Kisner, C.; Fillin-Yeh, K.; Bharadwaj, S.; Schmidt, C.; Abdulsamad, M.; Engel, A. Blueprint for Autonomous Urbanism Second Edition. NACTO. 2019. Available online: https://nacto.org/publication/bau2/transit/ (accessed on 23 September 2023).
- Miller, S.A.; Heard, B.R. The Environmental Impact of Autonomous Vehicles Depends on Adoption Patterns. Environ. Sci. Technol. 2016, 50, 6119–6121. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M. The travel and environmental implications of shared autonomous vehicles, using agent-based model scenarios. Transp. Res. Part C Emerg. Technol. 2014, 40, 1–13. [Google Scholar] [CrossRef]
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; Skabardonis, A.; Zafiropoulou, V. Connected & autonomous vehicles—Environmental impacts—A review. Sci. Total Environ. 2020, 71, 135237. [Google Scholar] [CrossRef]
- Nunes, P.; Figueiredo, R.; Brito, M.C. The use of parking lots to solar-charge electric vehicles. Renew. Sustain. Energy Rev. 2016, 66, 679–693. Available online: https://www.sciencedirect.com/science/article/pii/S1364032116304294 (accessed on 9 August 2023). [CrossRef]
- González-González, E.; Nogués, S.; Stead, D. Parking Futures: Preparing European Cities for the Advent of Automated Vehicles. Land Use Policy 2020, 91, 104010. [Google Scholar] [CrossRef]
- Neufville, R.; Abdalla, H.; Abbas, A. Potential of Connected Fully Autonomous Vehicles in Reducing Congestion and Associated Carbon Emissions. Sustainability 2022, 14, 6910. [Google Scholar] [CrossRef]
- Metz, D. Developing Policy for Urban Autonomous Vehicles: Impact on Congestion. Urban Sci. 2018, 2, 33. [Google Scholar] [CrossRef]
- Makridis, M.; Mattas, K.; Mogno, C.; Ciuffo, B.; Fontaras, G. The impact of automation and connectivity on traffic flow and CO2 emissions. A detailed microsimulation study. Atmos. Environ. 2020, 226, 117399. [Google Scholar] [CrossRef]
- Rafael, S.; Correia, L.P.; Lopes, D.; Bandeira, J.; Coelho, M.C.; Andrade, M.; Borrego, C.; Miranda, A.I. Autonomous vehicles opportunities for cities air quality. Sci. Total Environ. 2020, 712, 136546. [Google Scholar] [CrossRef]
- Andrei, L.; Negulescu, M.H.; Luca, O. Premises for the Future Deployment of Automated and Connected Transport in Romania Considering Citizens’ Perceptions and Attitudes towards Automated Vehicles. Energies 2022, 15, 1698. [Google Scholar] [CrossRef]
- Andrei, L.; Luca, O.; Gaman, F. Insights from user preferences on automated vehicles: Influence of socio-demographic factors on value of time in Romania case. Sustainability 2022, 14, 10828. [Google Scholar] [CrossRef]
- Luca, O.; Andrei, L.; Iacoboaea, C.; Gaman, F. Unveiling the Hidden Effects of Automated Vehicles on “Do No Significant Harm” Components. Sustainability 2023, 15, 11265. [Google Scholar] [CrossRef]
- Ministerul Transporturilor. Master Planul General de Transport. 2018. Available online: http://www.mt.gov.ro/web14/strategia-in-transporturi/master-plan-general-transport (accessed on 15 February 2022).
- Ministerul Transporturilor. Strategia Pentru Transport Durabil pe Perioada 2007–2013 şi 2020, 2030. 2008. Available online: http://www.mt.gov.ro/web14/documente/strategie/strategii_sectoriale/strategie_dezvoltare_durabila_noua_ultima_forma.pdf (accessed on 27 June 2023).
- Ministerul Transporturilor si Infrastructurii. Strategia de Transport Intermodal in Romania. 2011. Available online: http://mt.gov.ro/web14/documente/strategie/strategii_sectoriale/strategie_de_transport_intermodal_text.pdf (accessed on 21 June 2023).
- Ministerul Transporturilor, Infrastructurii si Comunicatiilor. Strategia de Dezvoltare a Infrastructurii Feroviare. 2020. Available online: http://www.cfr.ro/index.php/ct-menu-item-3/ct-menu-item-55/strategia-de-dezvoltare-a-infrastructurii-feroviare (accessed on 27 January 2023).
- Ministerul Transporturilor si Infrastructurii. Strategia Națională STI—2020–2030. Ministerul Transporturilor si Infrastructurii. 2022. Available online: https://www.mt.ro/web14/documente/domenii/Sisteme-de-transport-inteligente/Acte-normative/2.pdf (accessed on 1 October 2023).
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar]
- Lu, Q.; Tettamanti, T.; Hörcher, D.; Varga, I. The impact of autonomous vehicles on urban traffic network capacity: An experimental analysis by microscopic traffic simulation. TaylorFrancis Transp. Lett. 2020, 12, 540–549. [Google Scholar] [CrossRef]
- Schweizer, J.; Poliziani, C.; Rupi, F.; Morgano, D.; Magi, M. Building a Large-Scale Micro-Simulation Transport Scenario Using Big Data. ISPRS Int. J. Geo-Inf. 2021, 10, 165. [Google Scholar] [CrossRef]
- Huang, Y.; Kockelman, K.M.; Garikapati, V.; Zhu, L.; Young, S. Use of Shared Automated Vehicles for First-Mile Last-Mile Service: Micro-Simulation of Rail-Transit Connections in Austin, Texas. Transp. Res. Rec. 2021, 2675, 135–149. [Google Scholar] [CrossRef]
- SUMO Documentation. Available online: https://sumo.dlr.de/docs/index.html (accessed on 9 June 2023).
- STREETMIX. Available online: https://about.streetmix.net/ (accessed on 17 April 2023).
- Planul de Mobilitate Urbana Durabila 2016–2030 Regiunea Bucuresti-Ilfov. Rom Engineering Ltd. și AVENSA Consulting SRL. 2016. Available online: https://tpbi.ro/wp-content/uploads/2021/02/proiect_pmud.pdf (accessed on 21 June 2023).
- PMB. Available online: http://urbanism.pmb.ro/#zoom=6.0085942958849365&lat=331268.23202&lon=584857.09417&layers=BFFFFFFFFFFFFTFTTFTTTT (accessed on 9 April 2023).
- Google Maps. Google Maps. Available online: https://www.google.com/maps/@44.4676681,26.067474,942a,35y,336.96h,40.62t/data=!3m1!1e3 (accessed on 17 April 2023).
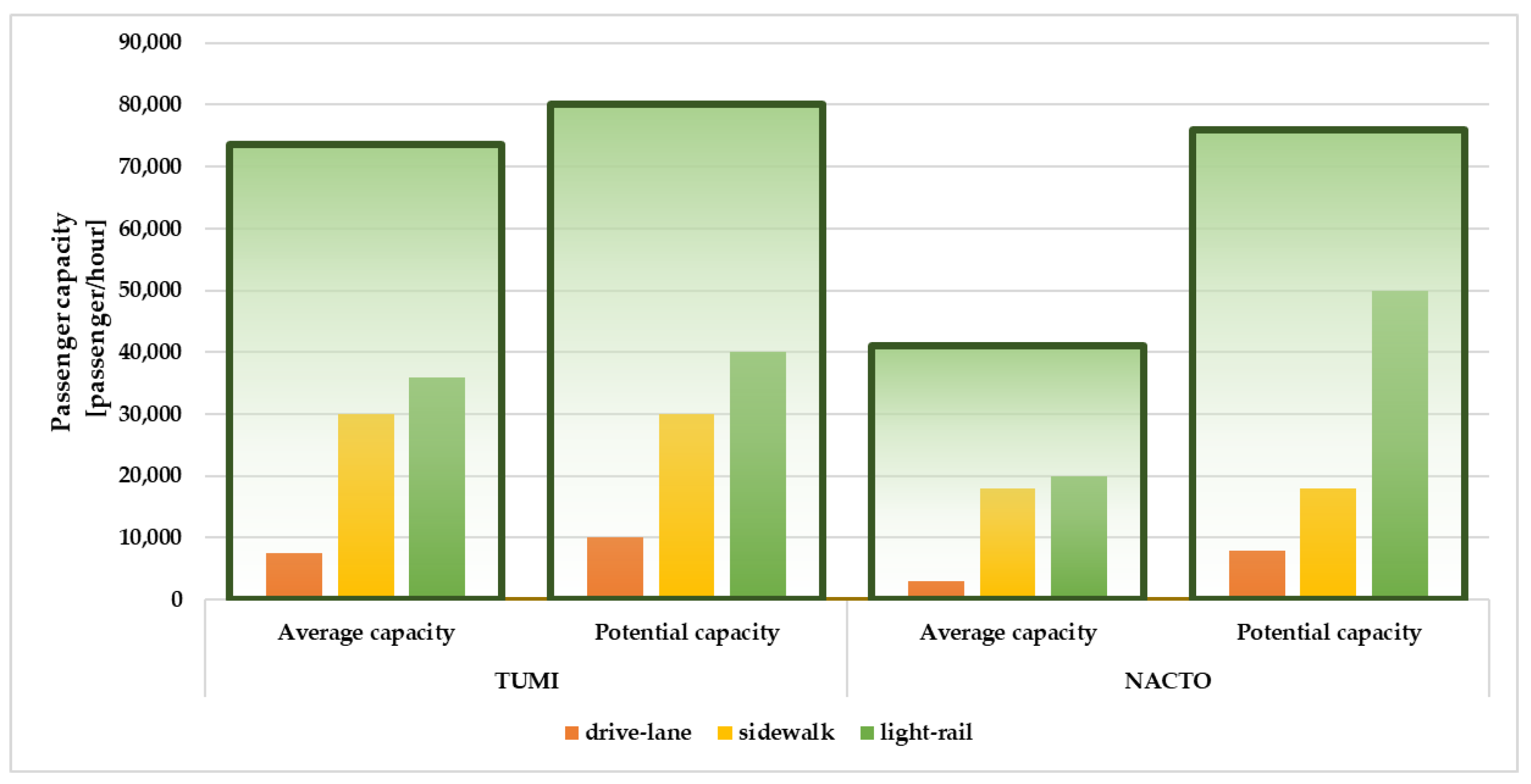
- TUMI. Passenger Capacity of Different Transport Modes. Available online: https://transformative-mobility.org/multimedia/passenger-capacity-of-different-transport-modes/ (accessed on 17 April 2023).
- National Association of City Transportation Officials. Designing to Move People. 2016. Available online: https://nacto.org/publication/transit-street-design-guide/introduction/why/designing-move-people/ (accessed on 5 March 2023).
- Gudwin, R.R. Urban Traffic Simulation with SUMO—A Roadmap for the Beginners. DCA-FEEC-UNICAMP. July 2016. Available online: https://faculty.dca.fee.unicamp.br/gudwin/ericsson/SUMOSimulation (accessed on 10 June 2023).
- Clemente, M.L. Building a real-world traffic micro-simulation scenario from scratch with SUMO. SUMO Conf. Proc. 2022, 3, 215–230. [Google Scholar] [CrossRef]
- OpenStreetMap. OpenStreetMap. 2021. Available online: https://www.openstreetmap.org/ (accessed on 29 June 2023).
- Lyons, S.; Babbar, S. Market Forecast for Connected and Autonomous Vehicle. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/642813/15780_TSC_Market_Forecast_for_CAV_Report_FINAL.pdf (accessed on 10 June 2023).
- Biramo, Z.B.; Mekonnen, A.A. Modeling the potential impacts of automated vehicles on pollutant emissions under different scenarios of a test track. Environ. Syst. Res. 2022, 11, 28. [Google Scholar] [CrossRef] [PubMed]
- Erdmann, J. SUMO’s Lane-Changing Model. In Modeling Mobility with Open Data; Lecture Notes in Mobility; Behrisch, M., Weber, M., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 105–123. Available online: http://link.springer.com/10.1007/978-3-319-15024-6_7 (accessed on 24 April 2023).
- Foster, R. Integrating Autonomous Vehicles into Complete Streets. Medium. 2017. Available online: https://medium.com/@robert.m.fostr/integrating-autonomous-vehicles-into-complete-streets-e7f930c150b5 (accessed on 28 October 2023).
- Riggs, W.; Ruhl, M.; Rodier, C.; Baumgardner, W. Designing Streets for Autonomous Vehicles. In Road Vehicle Automation 6; Lecture Notes in Mobility; Meyer, G., Beiker, S., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 111–122. [Google Scholar]
- Riggs, W.; Appleyard, B.; Johnson, M. A design framework for livable streets in the era of autonomous vehicles. Urban Plan. Transp. Res. 2020, 8, 125–137. [Google Scholar] [CrossRef]
- Soteropoulos, A.; Berger, M.; Mitteregger, M. Compatibility of Automated Vehicles in Street Spaces: Considerations for a Sustainable Implementation. Sustainability 2021, 13, 2732. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Veh/h | Level 0 | Level 1 | Level 2 | Level 3 | Level 4 | Level 5 |
|---|---|---|---|---|---|---|---|
| 1 | 500 | 75% | 20% | 5% | 0 | 0 | 0 |
| 2 | 500 | 50% | 25% | 15% | 5% | 5% | 0 |
| 3 | 500 | 25% | 25% | 25% | 15% | 5% | 5 |
| 4 | 500 | 0 | 10% | 20% | 20% | 25% | 25% |
| 5 | 500 | 100% | |||||
| 6 | 750 | 100% | |||||
| 7 | 1000 | 100% | |||||
| Reduced number of lanes | |||||||
| 8 | 500 | 100% | |||||
| 9 | 750 | 100% | |||||
| 10 | 1000 | 100% | |||||
| 1st Stage | 2nd Stage | ||||
|---|---|---|---|---|---|
| Initial (m) | (m) | (%) | (m) | (%) | |
| Driving lane | 16 | 11.2 | −30% | 5.6 | −65% |
| Bike lane | 0 | 3.4 | 100% | 3.4 | 100% |
| Sidewalk | 7.4 | 8.6 | 16.2% | 11.6 | 56.8% |
| Public transport | 6.6 | 6.2 | −6.1% | 6 | −9.1% |
| Green space | 5 | 5.6 | 12% | 8.4 | 68% |
| Total width | 35 | 35 | 0 | 35 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrei, L.; Luca, O. Assessing the Transformative Potential: An Examination of the Urban Mobility Impact Based on an Open-Source Microscopic Traffic Simulator for Autonomous Vehicles. ISPRS Int. J. Geo-Inf. 2024, 13, 16. https://doi.org/10.3390/ijgi13010016
Andrei L, Luca O. Assessing the Transformative Potential: An Examination of the Urban Mobility Impact Based on an Open-Source Microscopic Traffic Simulator for Autonomous Vehicles. ISPRS International Journal of Geo-Information. 2024; 13(1):16. https://doi.org/10.3390/ijgi13010016
Chicago/Turabian StyleAndrei, Liliana, and Oana Luca. 2024. "Assessing the Transformative Potential: An Examination of the Urban Mobility Impact Based on an Open-Source Microscopic Traffic Simulator for Autonomous Vehicles" ISPRS International Journal of Geo-Information 13, no. 1: 16. https://doi.org/10.3390/ijgi13010016