


Procedural Point Cloud Modelling in Scan-to-BIM and Scan-vs-BIM Applications: A Review

Abstract
:1. Introduction
1.1. Applications
1.1.1. Progress Monitoring
1.1.2. Quality Assessment
1.2. Integrating BIM and Point Clouds
1.2.1. BIM File Formats
1.2.2. Integration and Interoperability
Loading BIM Models and Point Clouds on a Common Environment
Alignment
Comparison
Conversion
Visualization and Analysis
Compatibility
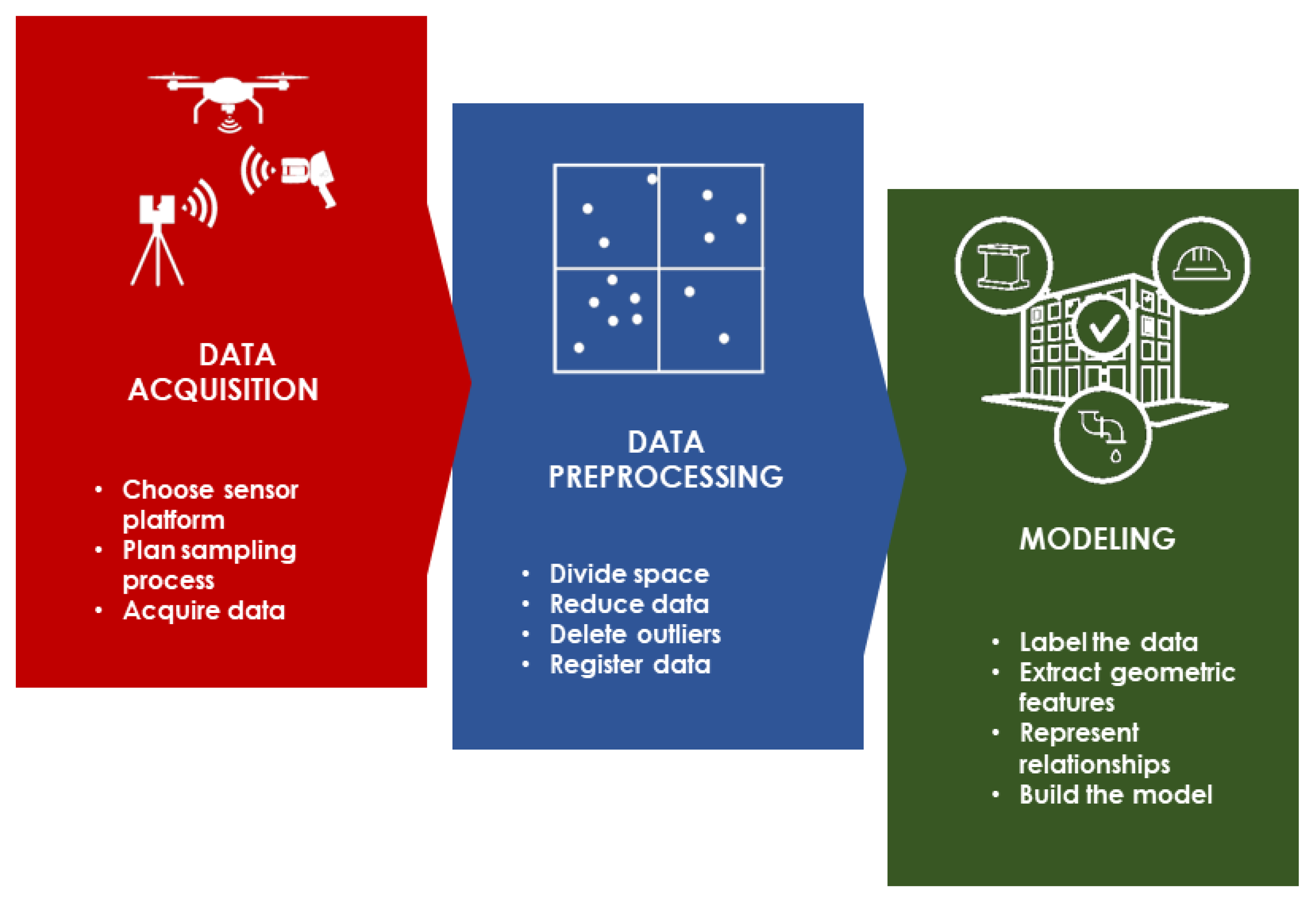
1.3. Methodology
2. Procedural Review
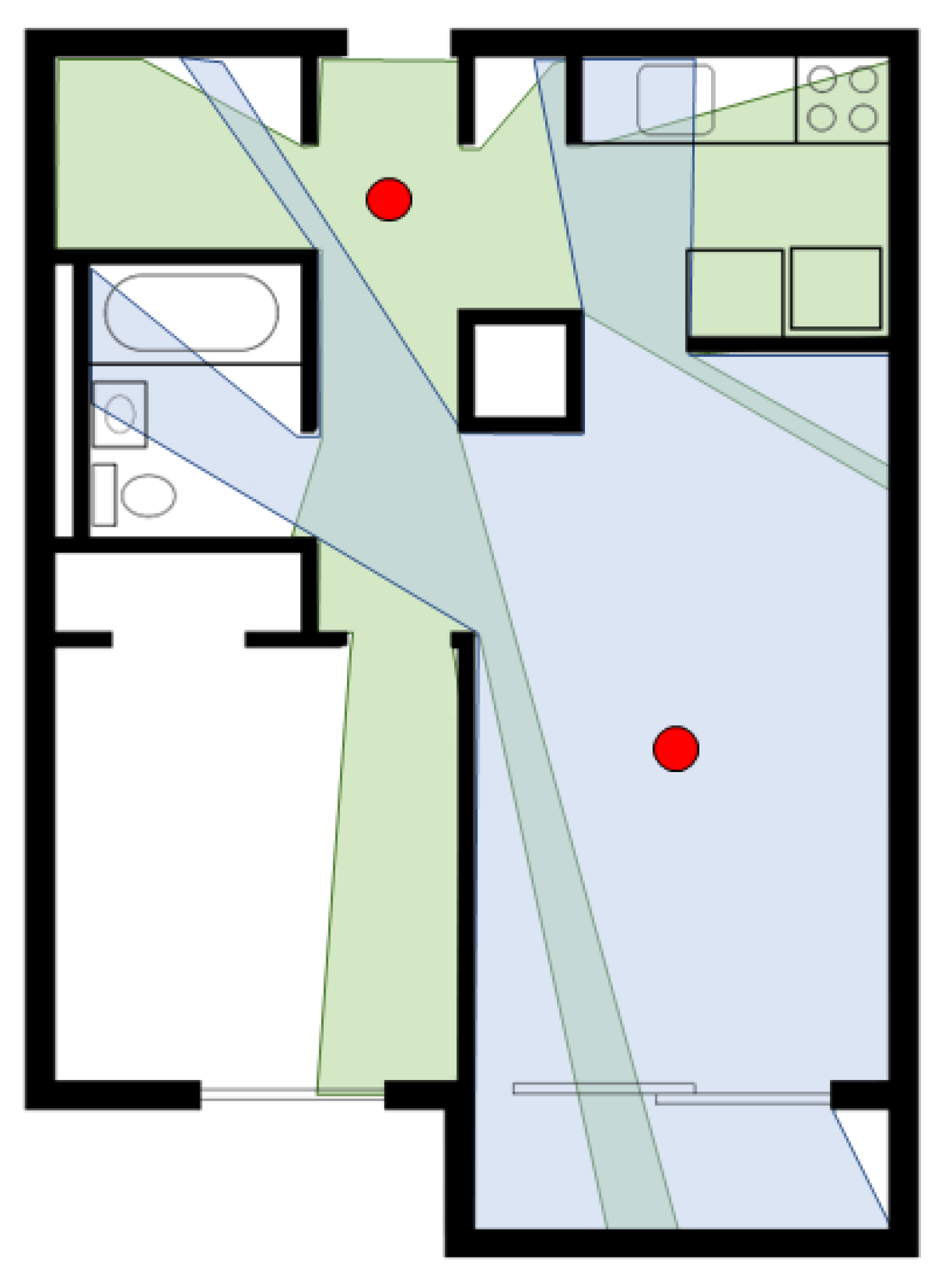
2.1. Scan Planning
- There are occlusions on a construction yard due to ongoing activities, machinery, workers, and construction materials;
- Some buildings may have complex surfaces displaying curves and irregular shapes;
- Completed components may hide other building components (e.g., ceiling pipes);
- Certain building components may not be scheduled to be built at the time that the scan was performed;
- Laser scanners have limitations such as range and accuracy and may not be capable of capturing all details, resulting in missing or erroneous data.
- Representing and determining the visibility of a target structure’s surface from distinct viewpoints, similarly to what is demonstrated in Figure 4;
- Selecting viewpoints which optimize sensor coverage with a minimum number of views.
2.2. Data Collection
2.2.1. Point Cloud Data
2.2.2. Sensors
Laser Scanners
- Phase-based scanners: they measure the change of phase of the emitted light to calculate distance;
- Time-of-flight (TOF) scanners: they measure the time the light takes to travel from the scanner to the reflective surface and back, and since the speed of light is known, the distance can be easily determined.
Laser Scanner versus Photogrammetry
2.2.3. Laser Scanning Platforms
Limitations
- They require line-of-sight to the target surface to be sampled, meaning they cannot collect information about occluded surfaces;
- Limited maximum range, beyond which point density is reduced and the measurements are subject to greater error;
- The vertical laser beam angle aperture is limited, so the area outside will not be sampled;
- Data acquisition can be relatively slow considering a rotating laser scanner; higher velocity typically involves inferior angle resolution;
- May be affected by noise due to light scattering on reflective surfaces, which cause reflections and distortions leading to decreased accuracy and the appearance of artefacts;
- 3D laser scanners are quite expensive to acquire when compared to other imaging sensors.
2.2.4. Dealing with Measurement Errors
2.3. Data Pre-Processing
2.3.1. Data Reduction
- Voxelization: divides the point cloud into small cubes (known as voxels), each containing a subset of the points. Density reduction is achieved by keeping only one point per voxel. This point can be chosen according to different principles, such as the centroid of the voxel or the proximity to the centre of the voxel.
- Minimum distance between points: removes points that are below a given minimum distance to each other. This value can be chosen based on the desired point density and level of detail. It can also be used with voxelization to further reduce density.
2.3.2. Point Cloud Registration
2.4. Geometry Extraction and Modeling
- Planar primitive detection: the structure is modelled by arranging planar polygons identified on the point cloud;
- Volumetric primitive fitting: the structure is modelled using simple volumetric primitives, imposing some sort of architectural regularization;
- Mesh-based reconstruction: a mesh is modelled from the point cloud providing limited semantic classification of the scene components.
2.4.1. 3D Reconstruction of Outdoor Environments
Façade Modeling
Roof Modeling
Building Volume Reconstruction
2.4.2. 3D Reconstruction of Indoor Environments
2.4.3. Relationship Representation
- Aggregation relationships: one element is a part of another;
- Topological relationships: one element is inside or outside another, or next to it;
- Directional relationships: one element is above or below another.
3. Future Research Directions and Initiatives
3.1. Multi-Platform Sensor Fusion
3.2. Enhanced Scan Planning
3.3. Incorporating Machine Learning Techniques
3.4. Integrated BIM Ecosystem
3.5. Benchmarking
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AEC | Architecture, Engineering and Construction |
| ALS | Aerial Laser Scanner |
| BIM | Building Information Modelling |
| BSP | Binary Space Partitioning |
| CAD | Computer Aided Design |
| CV | Computer Vision |
| GNSS | Global Navigation Satellite System |
| ICP | Iterative Closest Point |
| INS | Inertial Navigation System |
| LIDAR | Light Detection and Ranging |
| MLS | Mobile Laser Scanner |
| MW | Manhattan World |
| NBV | Next Best View |
| RANSAC | Random Sample Consensus |
| TLS | Terrestrial Laser Scanner |
| TOF | Time of Flight |
References
- Han, K.; Degol, J.; Golparvar-Fard, M. Geometry- and Appearance-Based Reasoning of Construction Progress Monitoring. J. Constr. Eng. Manag. 2018, 144, 04017110. [Google Scholar] [CrossRef] [Green Version]
- Ekanayake, B.; Wong, J.K.W.; Fini, A.A.F.; Smith, P. Computer vision-based interior construction progress monitoring: A literature review and future research directions. Autom. Constr. 2021, 127, 103705. [Google Scholar] [CrossRef]
- Maalek, R.; Lichti, D.D.; Ruwanpura, J.Y. Automatic Recognition of Common Structural Elements from Point Clouds for Automated Progress Monitoring and Dimensional Quality Control in Reinforced Concrete Construction. Remote Sens. 2019, 11, 1102. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Arditi, D. Advanced Progress Control of Infrastructure Construction Projects Using Terrestrial Laser Scanning Technology. Infrastructures 2020, 5, 83. [Google Scholar] [CrossRef]
- Kim, S.; Kim, S.; Lee, D.E. Sustainable Application of Hybrid Point Cloud and BIM Method for Tracking Construction Progress. Sustainability 2020, 12, 4106. [Google Scholar] [CrossRef]
- Meyer, T.; Brunn, A.; Stilla, U. Change detection for indoor construction progress monitoring based on BIM, point clouds and uncertainties. Autom. Constr. 2022, 141, 104442. [Google Scholar] [CrossRef]
- Pučko, Z.; Šuman, N.; Rebolj, D. Automated continuous construction progress monitoring using multiple workplace real time 3D scans. Adv. Eng. Inform. 2018, 38, 27–40. [Google Scholar] [CrossRef]
- Puri, N.; Turkan, Y. Bridge construction progress monitoring using lidar and 4D design models. Autom. Constr. 2020, 109, 102961. [Google Scholar] [CrossRef]
- Alizadehsalehi, S.; Yitmen, I. A Concept for Automated Construction Progress Monitoring: Technologies Adoption for Benchmarking Project Performance Control. Arab. J. Sci. Eng. 2019, 44, 4993–5008. [Google Scholar] [CrossRef]
- Elqasaby, A.R.; Alqahtani, F.K.; Alheyf, M. State of the Art of BIM Integration with Sensing Technologies in Construction Progress Monitoring. Sensors 2022, 22, 3497. [Google Scholar] [CrossRef]
- Bassier, M.; Vincke, S.; de Winter, H.; Vergauwen, M. Drift Invariant Metric Quality Control of Construction Sites Using BIM and Point Cloud Data. ISPRS Int. J. Geo-Inf. 2020, 9, 545. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Q.; Wu, J.; Zhao, Y. Dimensional accuracy and structural performance assessment of spatial structure components using 3D laser scanning. Autom. Constr. 2018, 96, 324–336. [Google Scholar] [CrossRef]
- Nguyen, C.H.P.; Choi, Y. Comparison of point cloud data and 3D CAD data for on-site dimensional inspection of industrial plant piping systems. Autom. Constr. 2018, 91, 44–52. [Google Scholar] [CrossRef]
- BuildingSMART International. Industry Foundation Classes (IFC)—An Introduction. Available online: https://technical.buildingsmart.org/standards/ifc/ (accessed on 3 January 2023).
- Aryan, A.; Bosché, F.; Tang, P. Planning for terrestrial laser scanning in construction: A review. Autom. Constr. 2021, 125, 103551. [Google Scholar] [CrossRef]
- Frías, E.; Díaz-Vilariño, L.; Balado, J.; Lorenzo, H. From BIM to Scan Planning and Optimization for Construction Control. Remote Sens. 2019, 11, 1963. [Google Scholar] [CrossRef] [Green Version]
- Frías, E.; Previtali, M.; Díaz-Vilariño, L.; Scaioni, M.; Lorenzo, H. Optimal scan planning for surveying large sites with static and mobile mapping systems. ISPRS J. Photogramm. Remote Sens. 2022, 192, 13–32. [Google Scholar] [CrossRef]
- Revuelta, E.C.; Chávez, M.J.; Vera, J.A.B.; Rodríguez, Y.F.; Sánchez, M.C. Optimization of laser scanner positioning networks for architectural surveys through the design of genetic algorithms. Measurement 2021, 174, 108898. [Google Scholar] [CrossRef]
- Dehbi, Y.; Leonhardt, J.; Oehrlein, J.; Haunert, J.H. Optimal scan planning with enforced network connectivity for the acquisition of three-dimensional indoor models. ISPRS J. Photogramm. Remote Sens. 2021, 180, 103–116. [Google Scholar] [CrossRef]
- Qiu, Q.; Wang, M.; Tang, X.; Wang, Q. Scan planning for existing buildings without BIM based on user-defined data quality requirements and genetic algorithm. Autom. Constr. 2021, 130, 103841. [Google Scholar] [CrossRef]
- DuraArk Online Repository. Available online: http://data.duraark.eu/ (accessed on 5 March 2023).
- Wu, C.; Yuan, Y.; Tang, Y.; Tian, B. Application of Terrestrial Laser Scanning (TLS) in the Architecture, Engineering and Construction (AEC) Industry. Sensors 2021, 22, 265. [Google Scholar] [CrossRef]
- Ingman, M.; Virtanen, J.P.; Vaaja, M.T.; Hyyppä, H. A Comparison of Low-Cost Sensor Systems in Automatic Cloud-Based Indoor 3D Modeling. Remote Sens. 2020, 12, 2624. [Google Scholar] [CrossRef]
- Rashdi, R.; Martínez-Sánchez, J.; Arias, P.; Qiu, Z. Scanning Technologies to Building Information Modelling: A Review. Infrastructures 2022, 7, 49. [Google Scholar] [CrossRef]
- Bertolini, L.; D’Amico, F.; Napolitano, A.; Ciampoli, L.B.; Gagliardi, V.; Manalo, J.R.D. A BIM-Based Approach for Pavement Monitoring Integrating Data from Non-Destructive Testing Methods (NDTs). Infrastructures 2023, 8, 81. [Google Scholar] [CrossRef]
- Muralikrishnan, B. Performance evaluation of terrestrial laser scanners—A review. Meas. Sci. Technol. 2021, 32, 072001. [Google Scholar] [CrossRef]
- Huang, H.; Zhang, C.; Asce, A.M.; Hammad, A. Effective Scanning Range Estimation for Using TLS in Construction Projects. J. Constr. Eng. Manag. 2021, 147, 04021106. [Google Scholar] [CrossRef]
- Xu, Y.; Tong, X.; Stilla, U. Voxel-based representation of 3D point clouds: Methods, applications, and its potential use in the construction industry. Autom. Constr. 2021, 126, 103675. [Google Scholar] [CrossRef]
- Wu, Z.; Zeng, Y.; Li, D.S.; Liu, J.; Feng, L. High-volume point cloud data simplification based on decomposed graph filtering. Autom. Constr. 2021, 129, 103815. [Google Scholar] [CrossRef]
- Wu, T.; Liu, J.; Li, M.; Chen, R.; Hyyppa, J. Automated large scale indoor reconstruction using vehicle survey data. In Proceedings of the 5th IEEE Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Services, UPINLBS 2018, Wuhan, China, 22–23 March 2018. [Google Scholar] [CrossRef]
- Nikoohemat, S.; Peter, M.; Elberink, S.O.; Vosselman, G. Semantic Interpretation of Mobile Laser Scanner Point Clouds in Indoor Scenes Using Trajectories. Remote Sens. 2018, 10, 1754. [Google Scholar] [CrossRef] [Green Version]
- Previtali, M.; Díaz-Vilariño, L.; Scaioni, M. Towards automatic reconstruction of indoor scenes from incomplete point clouds: Door and window detection and regularization. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-4, 507–514. [Google Scholar] [CrossRef] [Green Version]
- Previtali, M.; Díaz-Vilariño, L.; Scaioni, M. Indoor Building Reconstruction from Occluded Point Clouds Using Graph-Cut and Ray-Tracing. Appl. Sci. 2018, 8, 1529. [Google Scholar] [CrossRef] [Green Version]
- Shi, W.; Ahmed, W.; Li, N.; Fan, W.; Xiang, H.; Wang, M. Semantic Geometric Modelling of Unstructured Indoor Point Cloud. ISPRS Int. J. Geo-Inf. 2018, 8, 9. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Kira, Z.; Cho, Y.K. Deep Learning Approach to Point Cloud Scene Understanding for Automated Scan to 3D Reconstruction. J. Comput. Civ. Eng. 2019, 33, 04019027. [Google Scholar] [CrossRef]
- Tran, H.; Khoshelham, K. Procedural Reconstruction of 3D Indoor Models from Lidar Data Using Reversible Jump Markov Chain Monte Carlo. Remote Sens. 2020, 12, 838. [Google Scholar] [CrossRef] [Green Version]
- Cheng, D.; Zhang, J.; Zhao, D.; Chen, J.; Citation, D.T.; Automatic, D.; Wang, M.; Yu, H.; Zhu, Y. Automatic Extraction of Indoor Structural Information from Point Clouds. Remote Sens. 2021, 13, 4930. [Google Scholar] [CrossRef]
- Sheik, N.A.; Deruyter, G.; Veelaert, P. Plane-Based Robust Registration of a Building Scan with Its BIM. Remote Sens. 2022, 14, 1979. [Google Scholar] [CrossRef]
- Yang, F.; Li, Y.; Che, M.; Wang, S.; Wang, Y.; Zhang, J.; Cao, X.; Zhang, C. The Polygonal 3D Layout Reconstruction of an Indoor Environment via Voxel-Based Room Segmentation and Space Partition. ISPRS Int. J. Geo-Inf. 2022, 11, 530. [Google Scholar] [CrossRef]
- Nikoohemat, S.; Diakité, A.A.; Zlatanova, S.; Vosselman, G. Indoor 3D reconstruction from point clouds for optimal routing in complex buildings to support disaster management. Autom. Constr. 2020, 113, 103109. [Google Scholar] [CrossRef]
- Cheng, L.; Chen, S.; Liu, X.; Xu, H.; Wu, Y.; Li, M.; Chen, Y. Registration of Laser Scanning Point Clouds: A Review. Sensors 2018, 18, 1641. [Google Scholar] [CrossRef] [Green Version]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. Sens. Fusion IV Control Paradig. Data Struct. 1992, 1611, 586–606. [Google Scholar] [CrossRef] [Green Version]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the International Conference on 3-D Digital Imaging and Modeling, 3DIM, Quebec City, QC, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Zhang, J.; Wu, Q.; Fan, L.; Yuan, C. A Coarse-to-Fine Algorithm for Matching and Registration in 3D Cross-Source Point Clouds. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 2965–2977. [Google Scholar] [CrossRef] [Green Version]
- Wen, X.; Xie, H.; Liu, H.; Yan, L. Accurate Reconstruction of the LoD3 Building Model by Integrating Multi-Source Point Clouds and Oblique Remote Sensing Imagery. ISPRS Int. J. Geo-Inf. 2019, 8, 135. [Google Scholar] [CrossRef] [Green Version]
- Bueno, M.; Bosché, F.; González-Jorge, H.; Martínez-Sánchez, J.; Arias, P. 4-Plane congruent sets for automatic registration of as-is 3D point clouds with 3D BIM models. Autom. Constr. 2018, 89, 120–134. [Google Scholar] [CrossRef]
- Cui, Y.; Li, Q.; Yang, B.; Xiao, W.; Chen, C.; Dong, Z.; Cui, Y.; Li, Q.; Yang, B.; Chen, C.; et al. Automatic 3-D Reconstruction of Indoor Environment With Mobile Laser Scanning Point Clouds Index Terms-Three-dimensional (3-D) reconstruction, indoor modeling, mobile laser scanning, point clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3117. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Shen, X.; Yu, Y.; Guan, H.; Li, J.; Zhang, G.; Li, D. Building Extraction from Airborne Multi-Spectral LiDAR Point Clouds Based on Graph Geometric Moments Convolutional Neural Networks. Remote Sens. 2020, 12, 3186. [Google Scholar] [CrossRef]
- Bassier, M.; Vergauwen, M.; Poux, F. Point Cloud vs. Mesh Features for Building Interior Classification. Remote Sens. 2020, 12, 2224. [Google Scholar] [CrossRef]
- Wang, C.; Hou, S.; Wen, C.; Gong, Z.; Li, Q.; Sun, X.; Li, J. Semantic line framework-based indoor building modeling using backpacked laser scanning point cloud. ISPRS J. Photogramm. Remote Sens. 2018, 143, 150–166. [Google Scholar] [CrossRef]
- Zolanvari, S.M.; Laefer, D.F.; Natanzi, A.S. Three-dimensional building façade segmentation and opening area detection from point clouds. ISPRS J. Photogramm. Remote Sens. 2018, 143, 134–149. [Google Scholar] [CrossRef]
- Ochmann, S.; Vock, R.; Klein, R. Automatic reconstruction of fully volumetric 3D building models from oriented point clouds. ISPRS J. Photogramm. Remote Sens. 2019, 151, 251–262. [Google Scholar] [CrossRef] [Green Version]
- Dey, E.K.; Awrangjeb, M.; Stantic, B. Outlier detection and robust plane fitting for building roof extraction from LiDAR data. Int. J. Remote Sens. 2020, 41, 6325–6354. [Google Scholar] [CrossRef]
- Wang, S.; Cai, G.; Cheng, M.; Junior, J.M.; Huang, S.; Wang, Z.; Su, S.; Li, J. Robust 3D reconstruction of building surfaces from point clouds based on structural and closed constraints. ISPRS J. Photogramm. Remote Sens. 2020, 170, 29–44. [Google Scholar] [CrossRef]
- Chen, M.; Liu, X.; Zhang, X.; Wang, M.; Zhao, L.; Oude, S.; Khoshelham, K.; Wang, C. Building Extraction from Terrestrial Laser Scanning Data with Density of Projected Points on Polar Grid and Adaptive Threshold. Remote Sens. 2021, 13, 4392. [Google Scholar] [CrossRef]
- Fan, H.; Wang, Y.; Gong, J. Layout graph model for semantic façade reconstruction using laser point clouds. Geo-Spat. Inf. Sci. 2021, 24, 403–421. [Google Scholar] [CrossRef]
- Fang, H.; Lafarge, F.; Pan, C.; Huang, H. Floorplan generation from 3D point clouds: A space partitioning approach. ISPRS J. Photogramm. Remote Sens. 2021, 175, 44–55. [Google Scholar] [CrossRef]
- Han, J.; Rong, M.; Jiang, H.; Liu, H.; Shen, S. Vectorized indoor surface reconstruction from 3D point cloud with multistep 2D optimization. ISPRS J. Photogramm. Remote Sens. 2021, 177, 57–74. [Google Scholar] [CrossRef]
- Zeng, H.; Wu, J.; Furukawa, Y. Neural Procedural Reconstruction for Residential Buildings. In Computer Vision—ECCV 2018; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2018; Volume 11207, pp. 759–775. [Google Scholar] [CrossRef]
- Tran, H.; Khoshelham, K.; Kealy, A.; Díaz-Vilariño, L. Shape Grammar Approach to 3D Modeling of Indoor Environments Using Point Clouds. J. Comput. Civ. Eng. 2019, 33, 04018055. [Google Scholar] [CrossRef]
- Namouchi, S.; Vallet, B.; Farah, I.R.; Ismail, H. Piecewise Horizontal 3D Roof Reconstruction from Aerial Lidar; IEEE: Piscataway, NJ, USA, 2019; pp. 8992–8995. [Google Scholar]
- Abbas, R.; Westling, F.A.; Skinner, C.; Hanus-Smith, M.; Harris, A.; Kirchner, N. BuiltView: Integrating LiDAR and BIM for Real-Time Quality Control of Construction Projects; IAARC Publications: Waterloo, ON, Canada, 2020; Volume 2020, pp. 233–239. [Google Scholar]
- Bassier, M.; Vergauwen, M. Topology Reconstruction of BIM Wall Objects from Point Cloud Data. Remote Sens. 2020, 12, 1800. [Google Scholar] [CrossRef]
- Zheng, Y.; Peter, M.; Zhong, R.; Elberink, S.O.; Zhou, Q. Space Subdivision in Indoor Mobile Laser Scanning Point Clouds Based on Scanline Analysis. Sensors 2018, 18, 1838. [Google Scholar] [CrossRef] [Green Version]
- Kang, Z.; Yang, J.; Yang, Z.; Cheng, S. A Review of Techniques for 3D Reconstruction of Indoor Environments. ISPRS Int. J. Geo-Inf. 2020, 9, 330. [Google Scholar] [CrossRef]
- Pintore, G.; Mura, C.; Ganovelli, F.; Fuentes-Perez, L.; Pajarola, R.; Gobbetti, E. State-of-the-art in Automatic 3D Reconstruction of Structured Indoor Environments. Comput. Graph. Forum 2020, 39, 667–699. [Google Scholar] [CrossRef]
- Czerniawski, T.; Ma, J.W.; Leite, F. Automated building change detection with amodal completion of point clouds. Autom. Constr. 2021, 124, 103568. [Google Scholar] [CrossRef]
- Albano, R. Investigation on Roof Segmentation for 3D Building Reconstruction from Aerial LIDAR Point Clouds. Appl. Sci. 2019, 9, 4674. [Google Scholar] [CrossRef] [Green Version]
- Maltezos, E.; Doulamis, A.; Doulamis, N.; Ioannidis, C. Building Extraction From LiDAR Data Applying Deep Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2019, 16, 155–159. [Google Scholar] [CrossRef]
- Xia, S.; Chen, D.; Wang, R.; Member, S.; Li, J.; Zhang, X.; Chen, D. Geometric Primitives in LiDAR Point Clouds: A Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 685–707. [Google Scholar] [CrossRef]
- Hu, P.; Miao, Y.; Hou, M. Reconstruction of Complex Roof Semantic Structures from 3D Point Clouds Using Local Convexity and Consistency. Remote Sens. 2021, 13, 1946. [Google Scholar] [CrossRef]
- Klimkowska, A.; Cavazzi, S.; Leach, R.; Grebby, S. Detailed Three-Dimensional Building Façade Reconstruction: A Review on Applications, Data and Technologies. Remote Sens. 2022, 14, 2579. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Gilani, S.A.N.; Siddiqui, F.U. An Effective Data-Driven Method for 3-D Building Roof Reconstruction and Robust Change Detection. Remote Sens. 2018, 10, 1512. [Google Scholar] [CrossRef] [Green Version]
- Coughlan, J.M.; Yuille, A.L. Manhattan World: Compass direction from a single image by Bayesian inference. In Proceedings of the IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 941–947. [Google Scholar] [CrossRef]
- Song, J.; Xia, S.; Wang, J.; Chen, D. Curved Buildings Reconstruction from Airborne LiDAR Data by Matching and Deforming Geometric Primitives. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1660–1674. [Google Scholar] [CrossRef]
- Wang, R.; Peethambaran, J.; Chen, D. LiDAR Point Clouds to 3-D Urban Models: A Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 606–627. [Google Scholar] [CrossRef]
- Khoshelham, K.; Tran, H.; Acharya, D.; Vilariño, L.D.; Kang, Z.; Dalyot, S. Results of the ISPRS benchmark on indoor modelling. ISPRS Open J. Photogramm. Remote Sens. 2021, 2, 100008. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Journal | No. of Papers | CiteScore | SJR |
|---|---|---|---|
| Remote Sensing | 14 | 7.9 | 1.136 |
| Automation in Construction | 12 | 16.7 | 2.443 |
| ISPRS Journal of Photogrammetry and Remote Sensing | 9 | 19.2 | 3.308 |
| ISPRS International Journal of Geo-Information | 5 | 6.2 | 0.738 |
| IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing | 3 | 7.8 | 1.264 |
| Sensors | 4 | 6.8 | 0.764 |
| Infrastructures | 3 | 4.3 | 0.527 |
| Journal of Construction Engineering and Management | 2 | 8.0 | 1.152 |
| Advanced Engineering Informatics | 2 | 11.8 | 1.709 |
| Applied Sciences | 2 | 4.5 | 0.492 |
| Journal of Computing in Civil Engineering | 2 | 12.1 | 1.349 |
| IEEE Transactions on Pattern Analysis and Machine Intelligence | 1 | 30.4 | 4.447 |
| IEEE Transactions on Circuits and Systems for Video Technology | 1 | 11.2 | 1.491 |
| IEEE Geoscience and Remote Sensing Letters | 1 | 6.4 | 1.284 |
| IEEE Transactions on Geoscience and Remote Sensing | 1 | 10.9 | 2.404 |
| Sustainability | 1 | 5.8 | 0.664 |
| Geo-spatial Information Science | 1 | 7.5 | 0.971 |
| International Journal of Remote Sensing | 1 | 7.0 | 0.732 |
| Computer Graphics Forum | 1 | 5.3 | 0.950 |
| Arabian Journal for Science and Engineering | 1 | 5.2 | 0.480 |
| The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences | 1 | 1.8 | 0.274 |
| Measurement | 1 | 9.0 | 1.106 |
| Measurement Science and Technology | 1 | 3.9 | 0.478 |
| Parameter | Photogrammetry | Laser Scanning |
|---|---|---|
| Instrument cost | Cheap | Expensive |
| Accuracy | High (needs advanced processing algorithms) | High |
| Acquisition time | Short | Long |
| 3D information | Needs to me estimated | Direct measurement |
| Data volume | Depends on the resolution of the images | Depends on point density |
| Sensitivity to environmental conditions | Requires sufficient lighting | Works during night or day |
| Parameters | TLS | MLS | ALS |
|---|---|---|---|
| Point density | Dense (>100 pt/m2) | Dense (>100 pt/m2) | Up to 50 pt/m2 |
| Scanning range | Point shape | Stripe shape | Surface shape |
| Accuracy | High accuracy (mm level) | High accuracy (cm level) | High accuracy (<15 cm) |
| Scanning perspective | Side view | Side view | Top view |
| Sensors | Laser scanner | GNSS, IMU, laser scanner | GNSS, IMU, laser scanner |
| Advantages | Provides the highest level of detail | Provides faster data, reduces acquisition time | Suitable for large area |
| Disadvantages | Not suitable for large infrastructure | Absolute accuracy is low because the satellite signals are blocked by buildings | Expensive for small project sites |
| Applications | Small area 3D reconstruction | HD mapping, urban monitoring, road mapping | Terrain mapping, vegetation monitoring, power line detection, bathymetric applications in shallow water |
| Method | References |
|---|---|
| Mesh-based simplification | [30] |
| Point-based simplification—voxelization | [6,11,13,31,32,33,34,35,36,37,38,39] |
| Point-based simplification—minimum distance | [7,35,40] |
| Method | References |
|---|---|
| Coarse registration—point features | [3,5,7,8,13,23,45] |
| Coarse registration—line features | [37] |
| Coarse registration—surface features | [37,38,46] |
| Coarse registration—PCA | [12,47] |
| Fine registration—ICP | [7,8,11,12,13,23,45,48] |
| Method | References |
|---|---|
| Planar primitive detection | [3,31,32,36,37,38,39,40,45,47,50,51,52,53,54,55,56,57,58] |
| Volumetric primitive fitting | [59,60] |
| Mesh-based reconstruction | [5,11,30,37,57,58,61,62,63] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abreu, N.; Pinto, A.; Matos, A.; Pires, M. Procedural Point Cloud Modelling in Scan-to-BIM and Scan-vs-BIM Applications: A Review. ISPRS Int. J. Geo-Inf. 2023, 12, 260. https://doi.org/10.3390/ijgi12070260
Abreu N, Pinto A, Matos A, Pires M. Procedural Point Cloud Modelling in Scan-to-BIM and Scan-vs-BIM Applications: A Review. ISPRS International Journal of Geo-Information. 2023; 12(7):260. https://doi.org/10.3390/ijgi12070260
Chicago/Turabian StyleAbreu, Nuno, Andry Pinto, Aníbal Matos, and Miguel Pires. 2023. "Procedural Point Cloud Modelling in Scan-to-BIM and Scan-vs-BIM Applications: A Review" ISPRS International Journal of Geo-Information 12, no. 7: 260. https://doi.org/10.3390/ijgi12070260