

Energy-Efficient 3D Path Planning for Complex Field Scenes Using the Digital Model with Landcover and Terrain
Abstract
:1. Introduction
2. Data and Methods
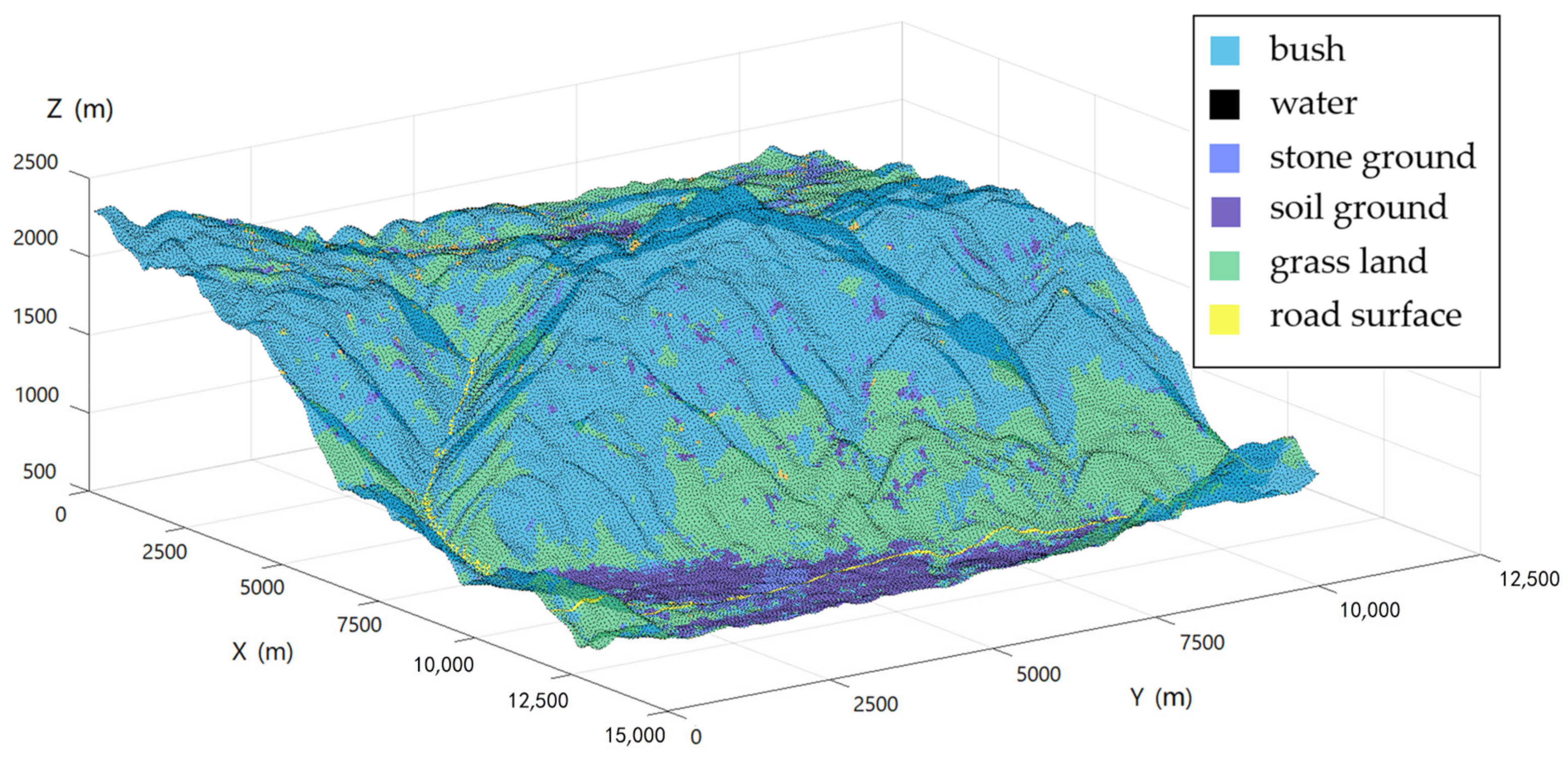
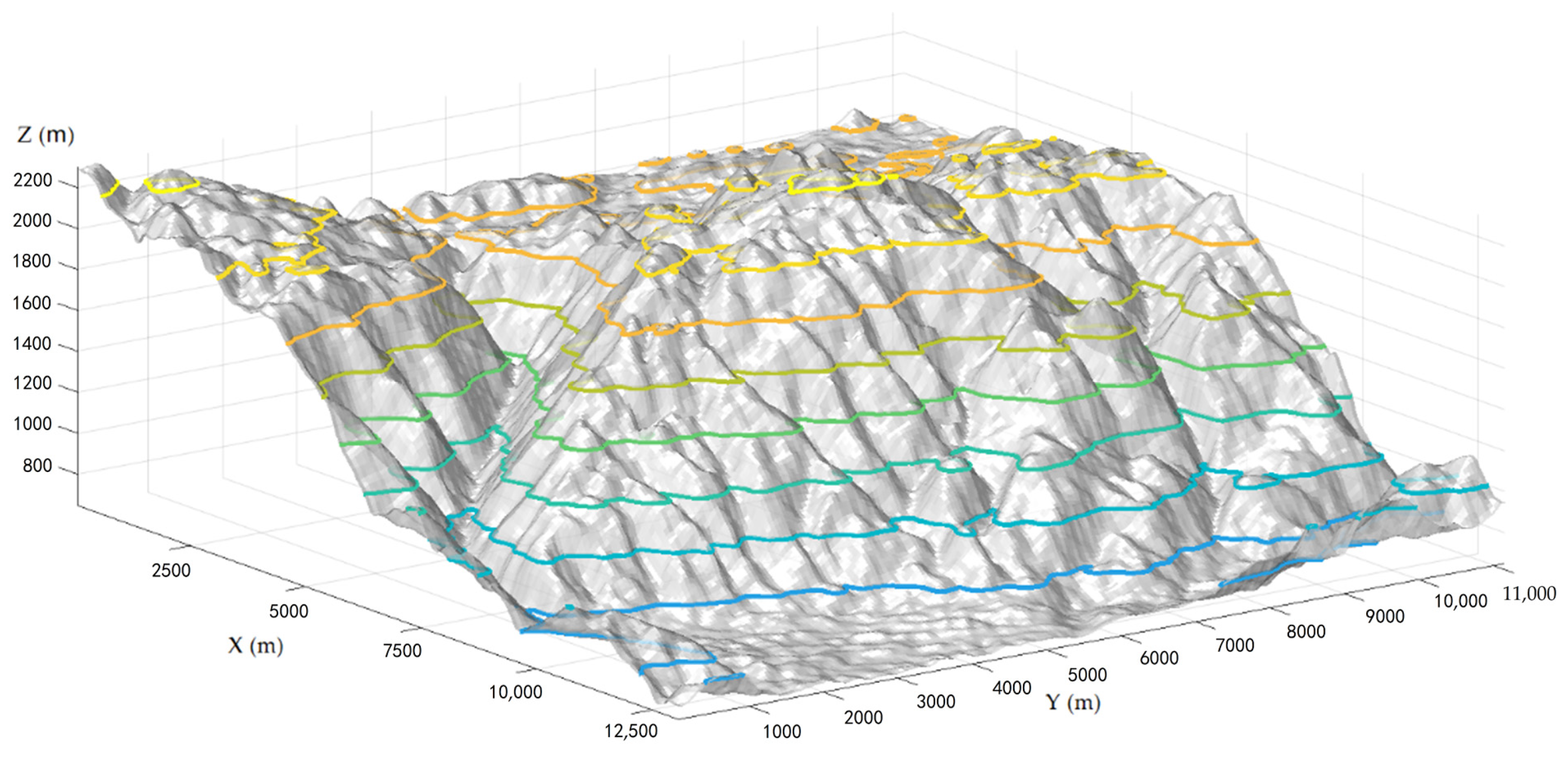
2.1. Study Area and Research Data
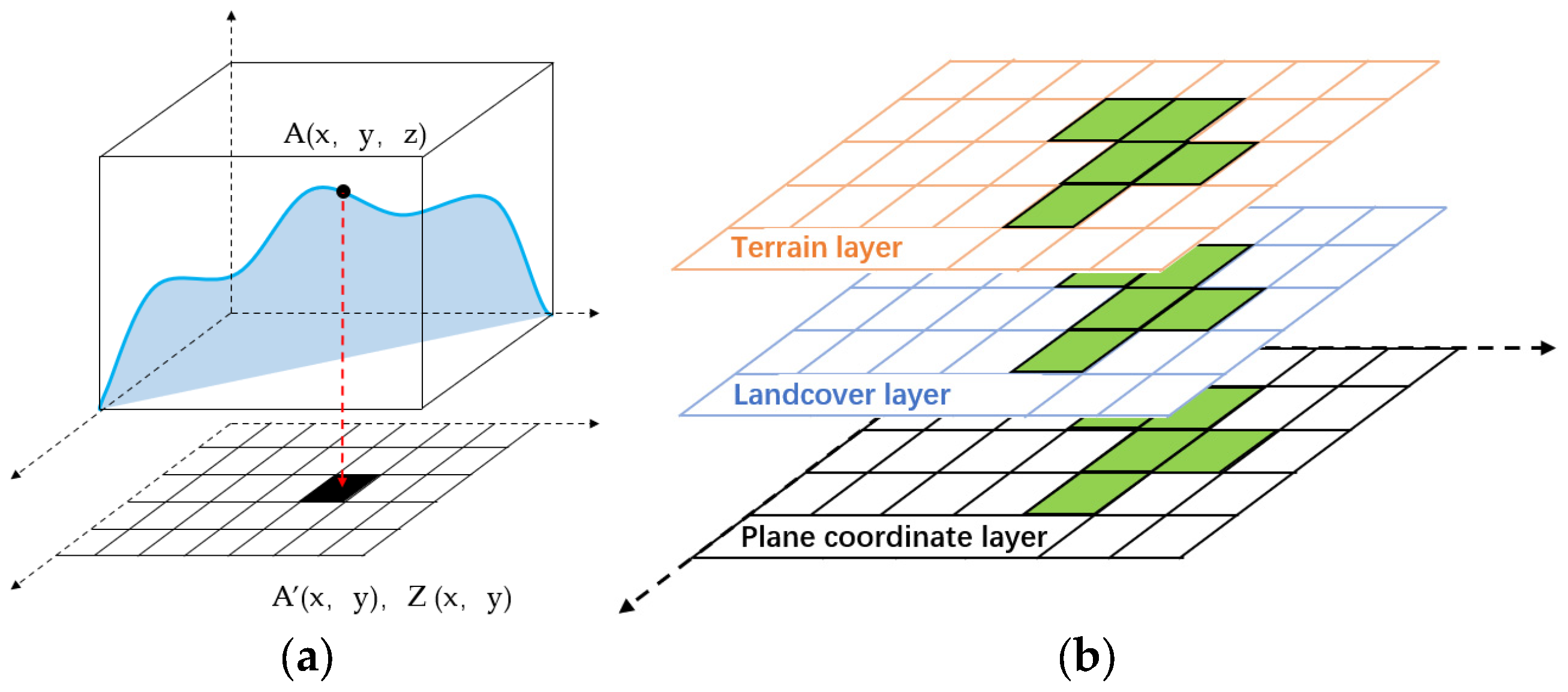
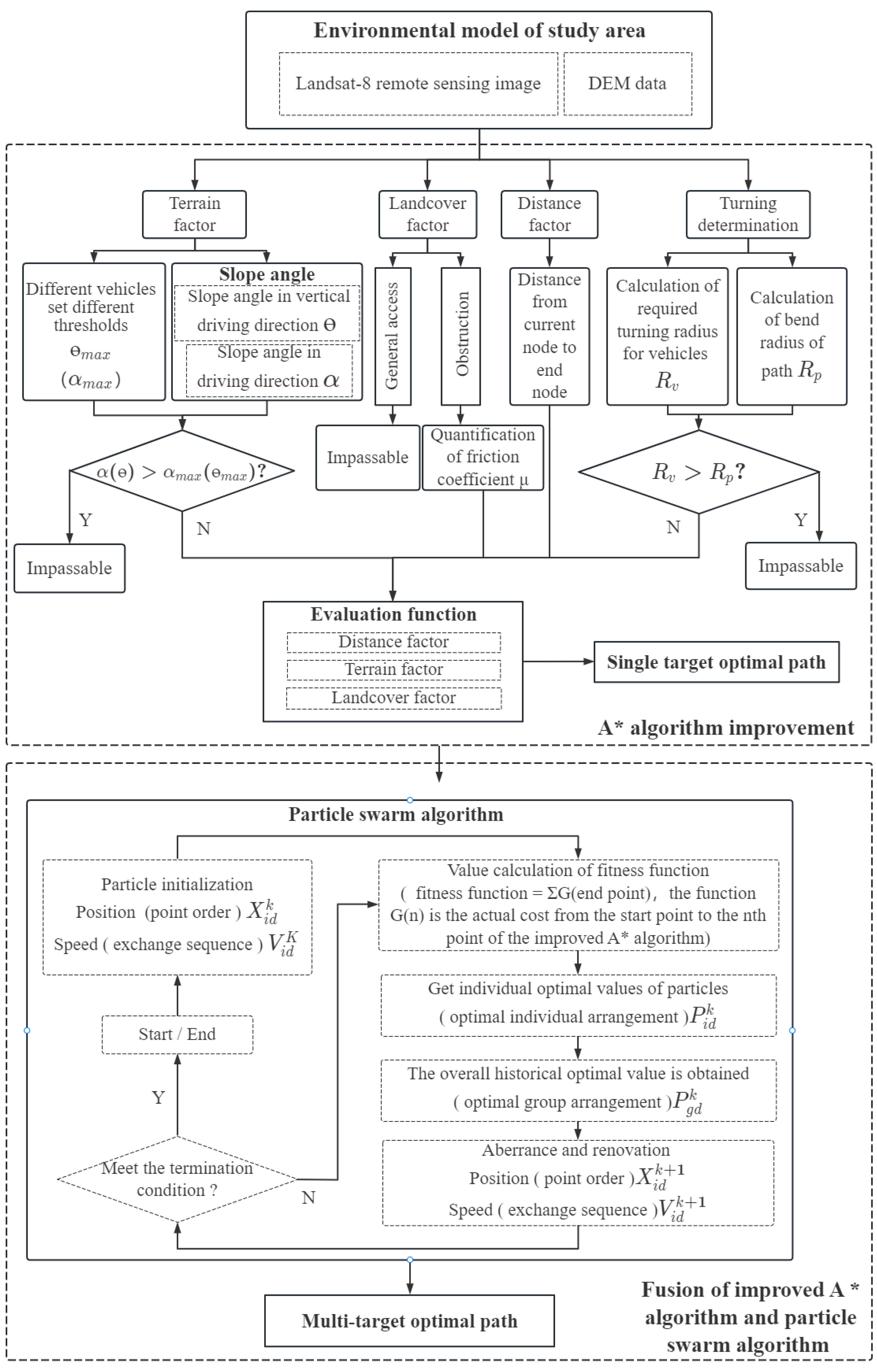
2.2. Technical Route
2.3. A* Algorithm Improvement
2.3.1. Traditional A* Algorithm
2.3.2. Improvement of the Evaluation Function
2.3.3. Determination of Impassable Points
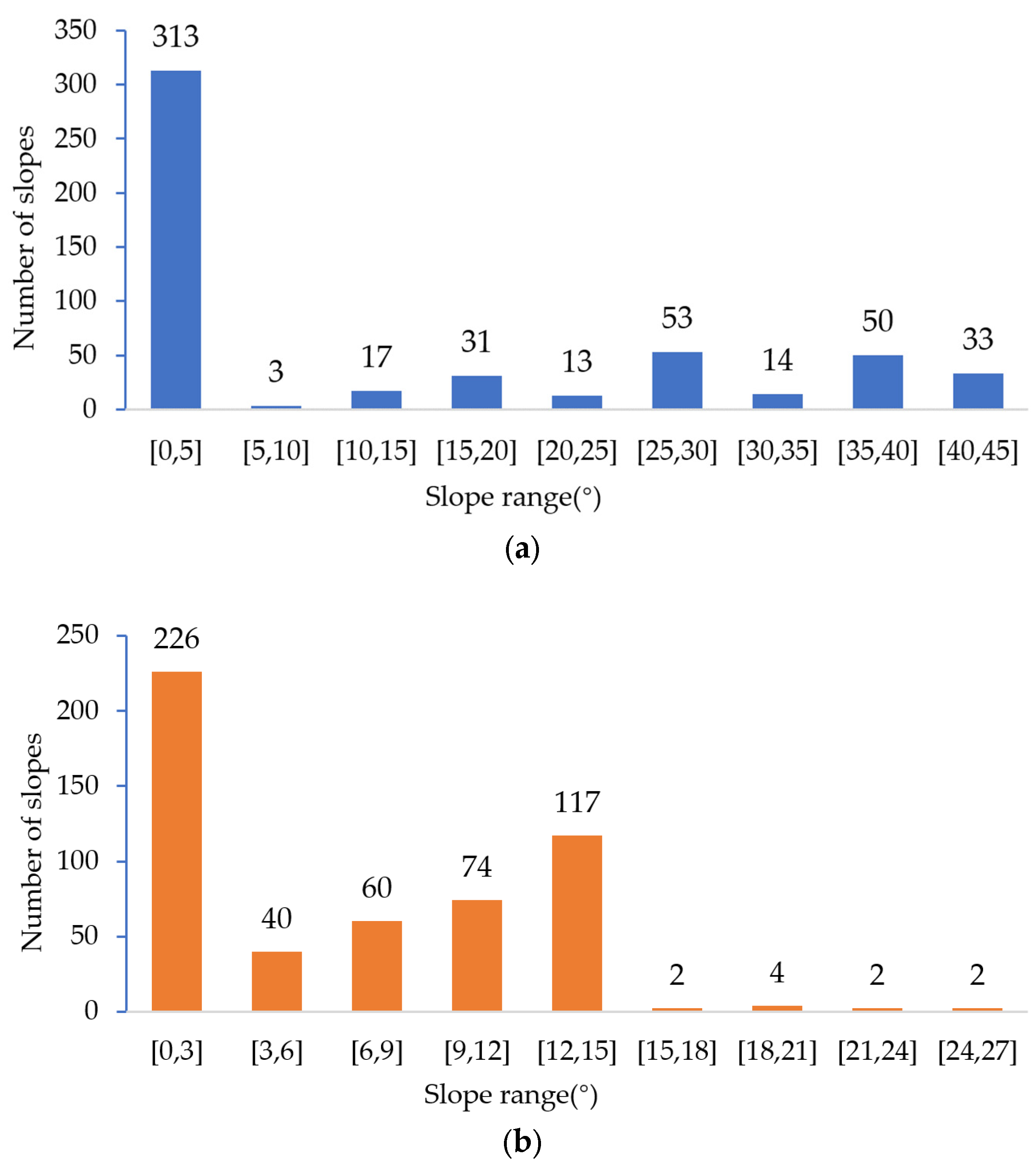
Slope Threshold
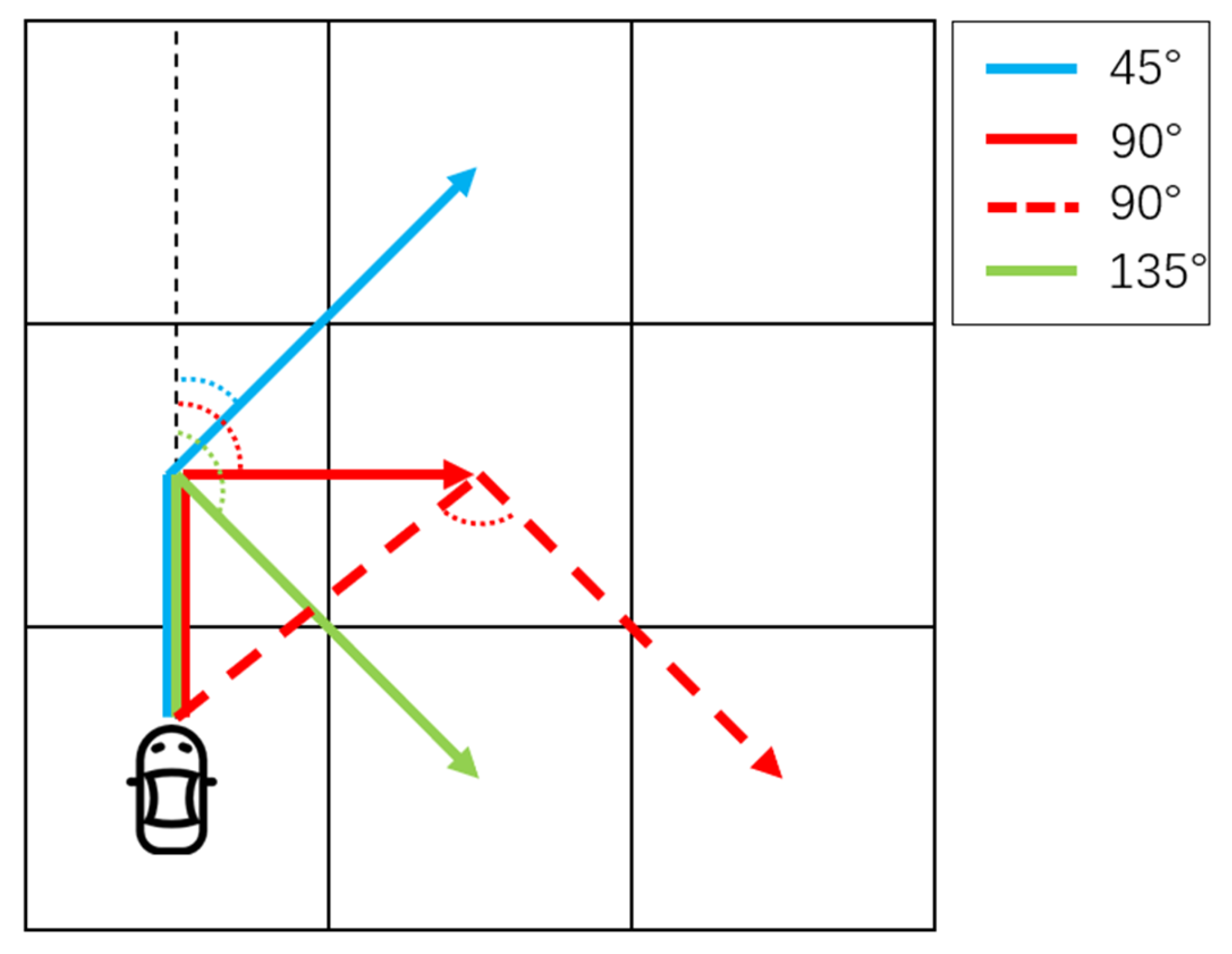
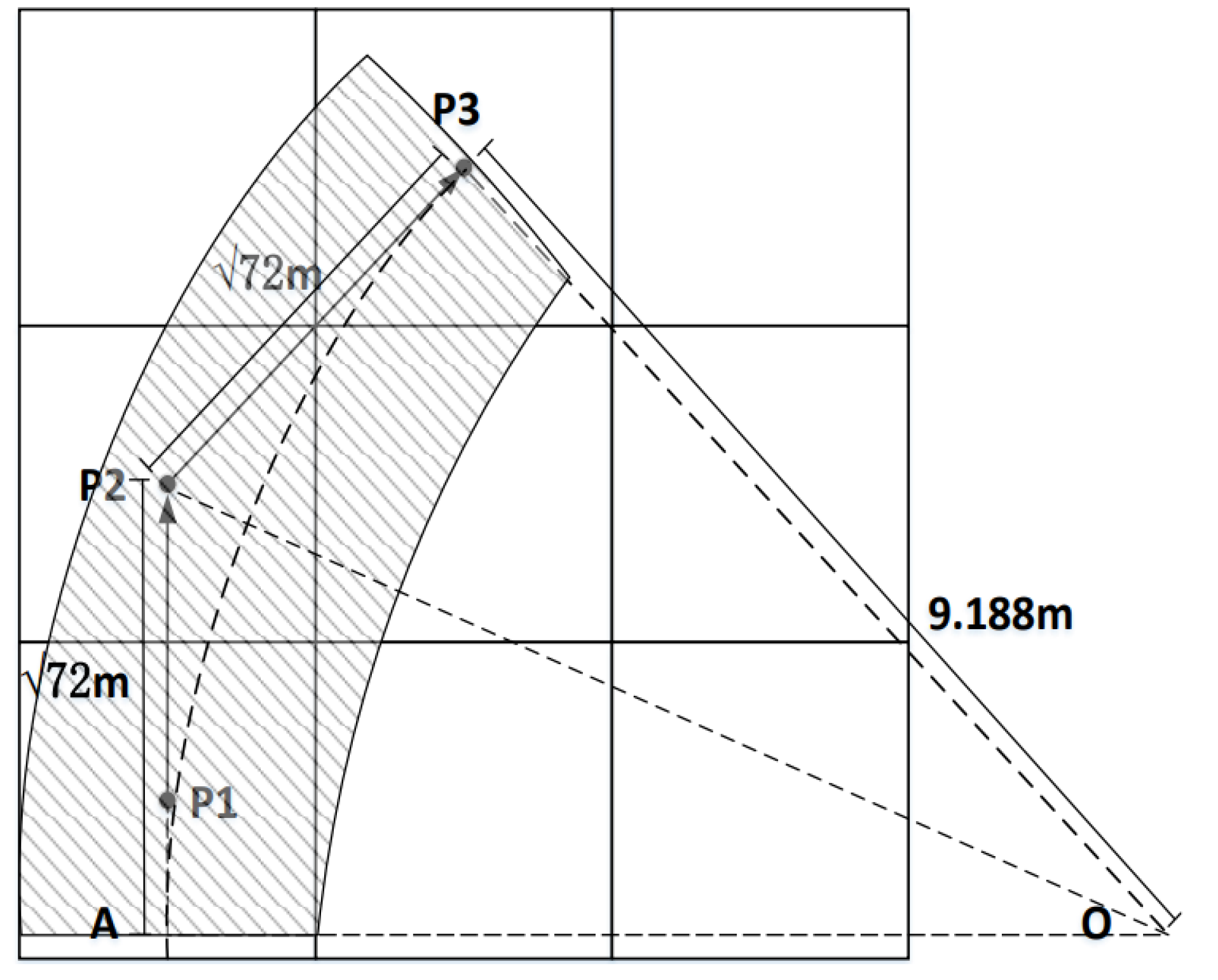
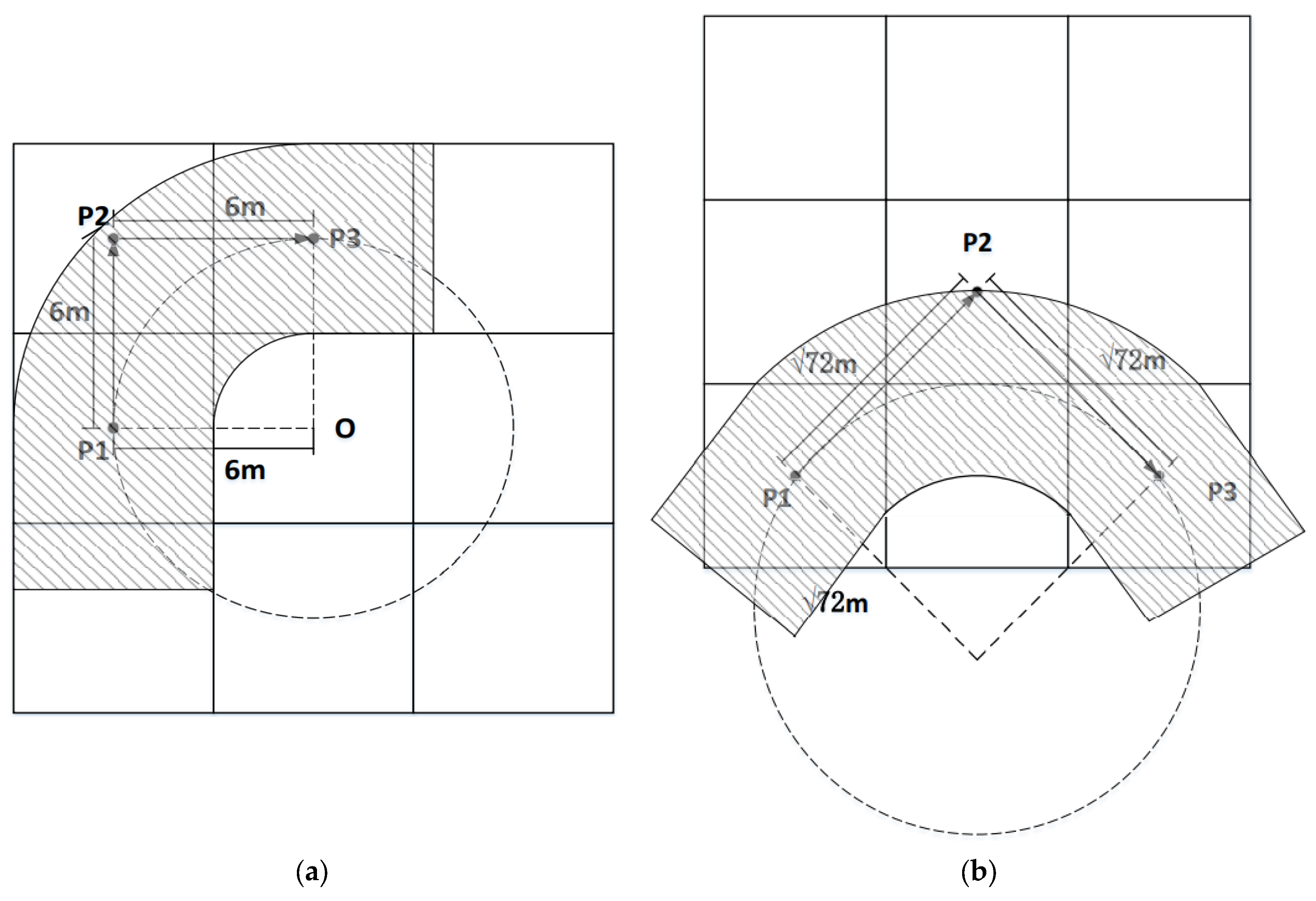
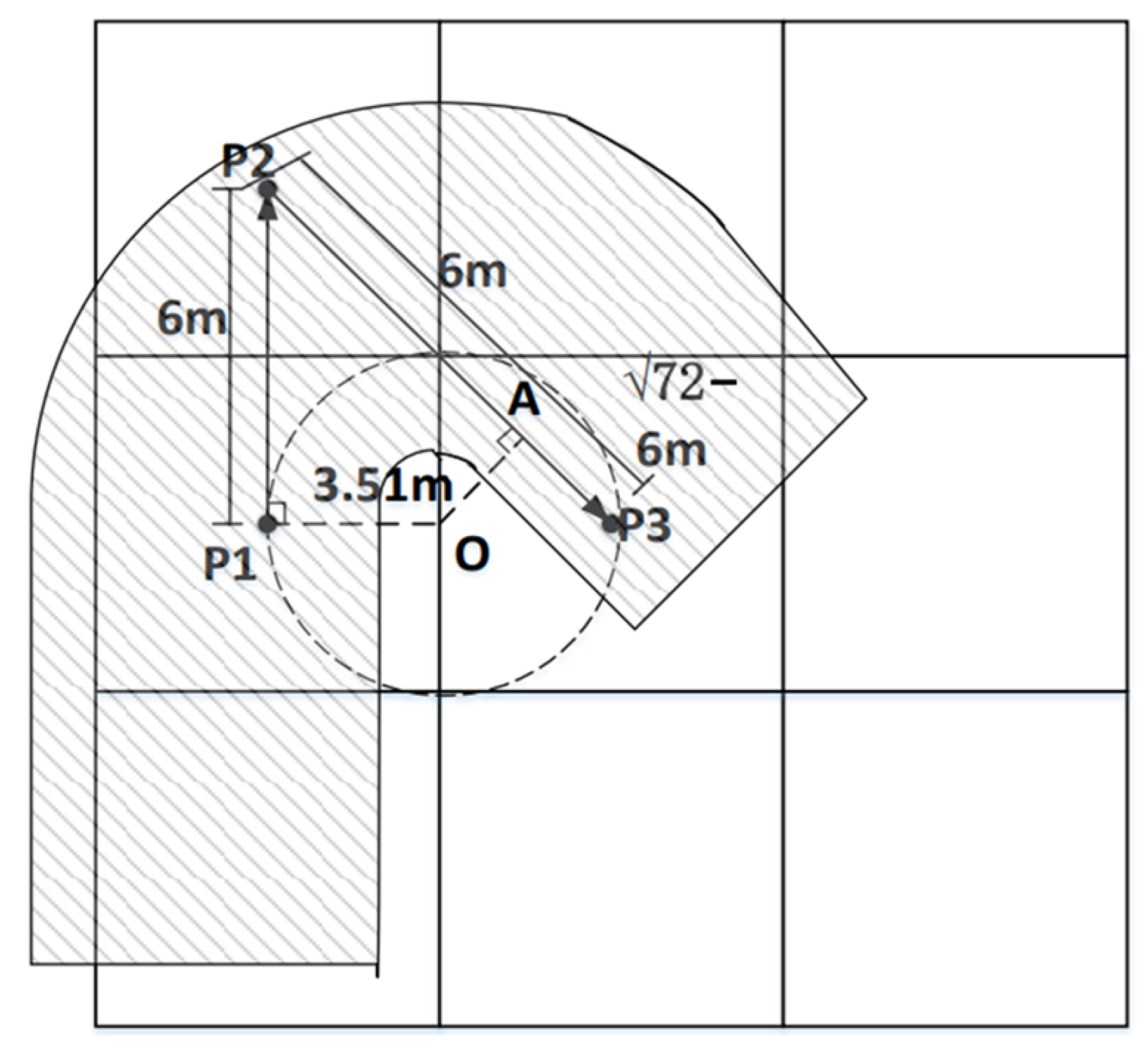
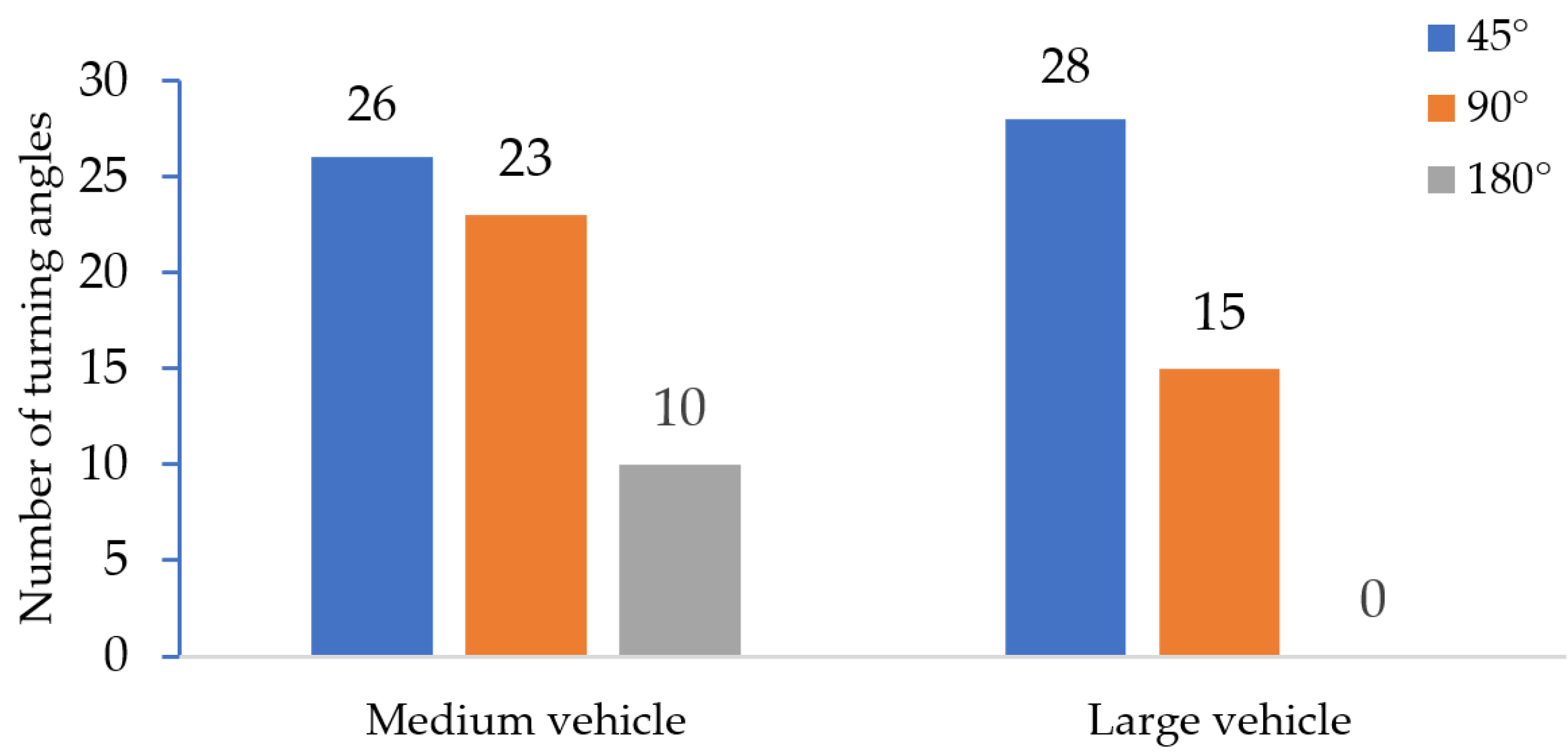
Determination of Turning Angles
- (1)
- A 45° angle
- (2)
- A 90° angle
- (3)
- A 135° angle

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Type | Middle Vehicle | Large Vehicle | ||||
|---|---|---|---|---|---|---|
| Vehicle name | BAIC Warrior | Range Rover | Rover Evoque | Antiriot fire water tank truck | Fire sprinkler | Foam fire truck |
| Minimum turning radius of the vehicle (m) | 5.280 | 5.280 | 4.760 | 6.026 | 5.663 | 6.952 |
| Inner radius of the vehicle ring (m) | 2.793 | 2.443 | 2.146 | 2.415 | 2.121 | 3.415 |
| Outer radius of the vehicle ring (m) | 4.881 | 5.138 | 4.604 | 6.300 | 6.101 | 6.908 |
2.4. Fusion of the Improved A * Algorithm and Particle Swarm Algorithm
2.4.1. Implementation of Particle Swarm Algorithm
- Step 1: Initialize the particle swarm, including random position and speed.
- Step 2: Evaluate the fitness of each particle based on the fitness function.
- Step 3: Determine the individual optimal values of particles, compare the fitness value of each particle with its best position , and then update its best position .
- Step 4: Determine the group optimal value of the particle swarm, compare the current best position of all particles, and then update the best position of the group.
- Step 5: Update the particle speed and position according to formulae (14) and (15).
- Step 6: Return to Step 2 if the end condition is not met.
2.4.2. The Fused Algorithm to Solve TSP
| Algorithm 1 The pseudocode of fused algorithm |
| Particle swarm algorithm and A* algorithm fusion Input: Set of target points Output: Optimal access sequence Begin:
|
3. Results and Analysis
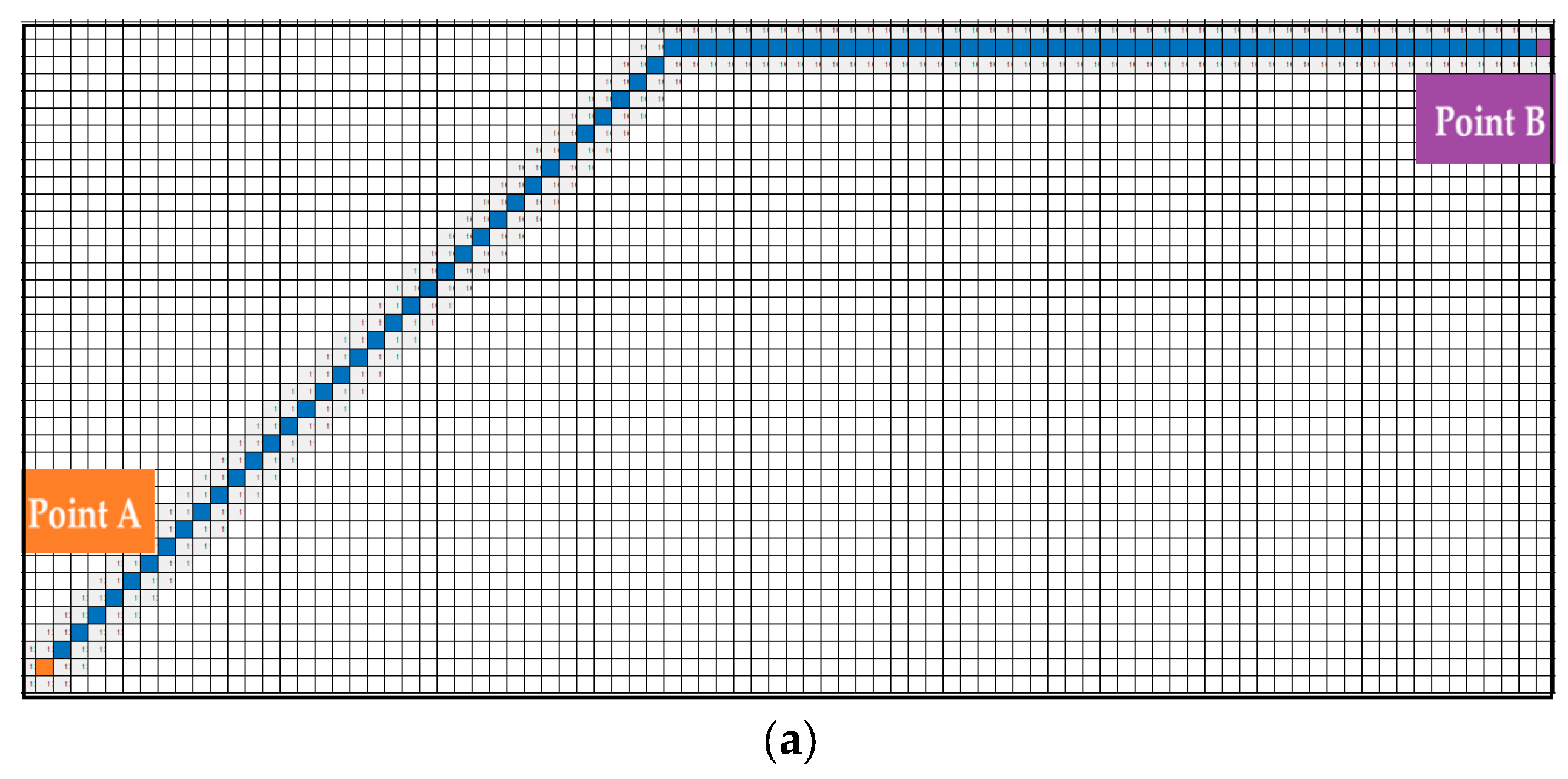
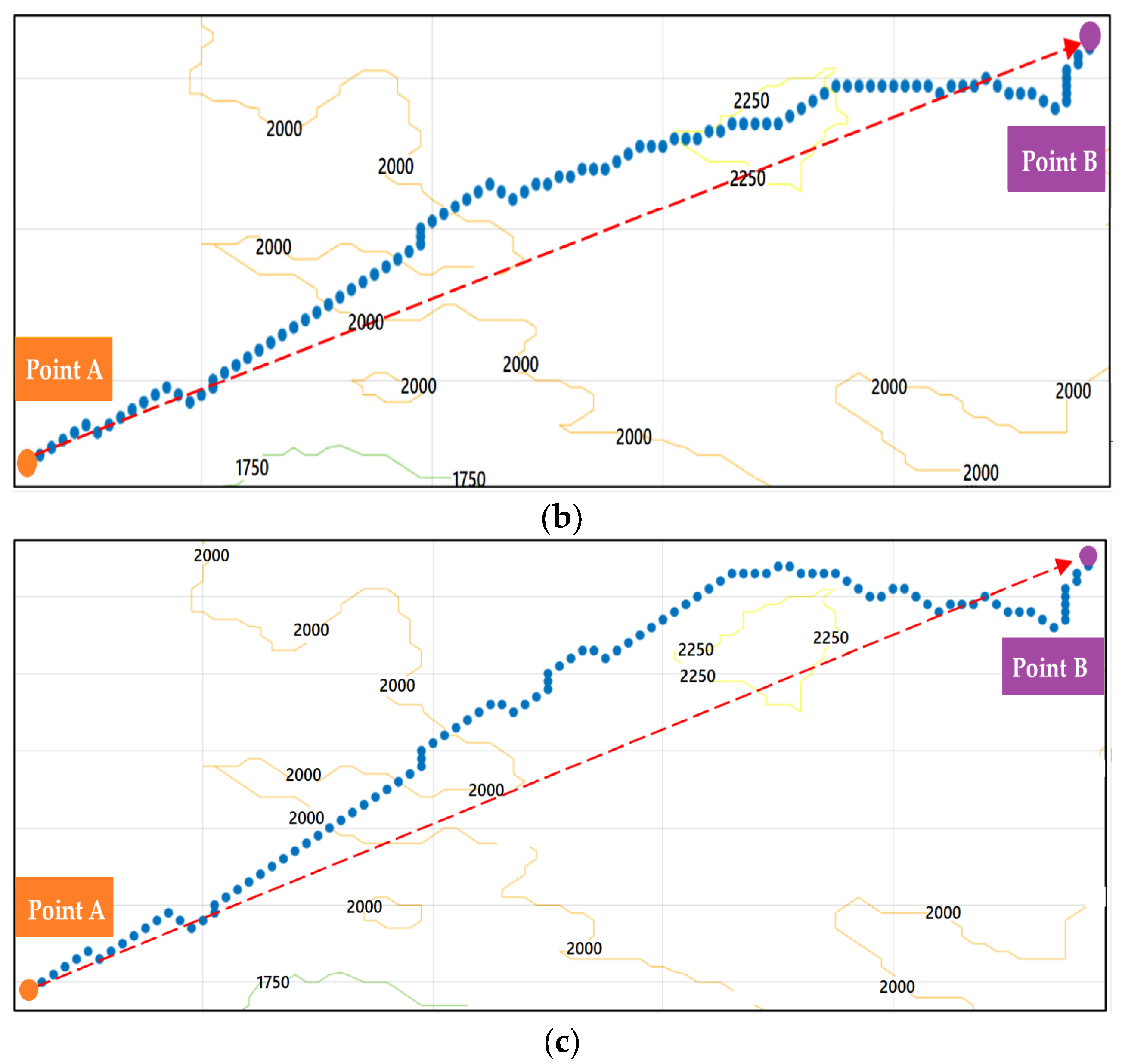
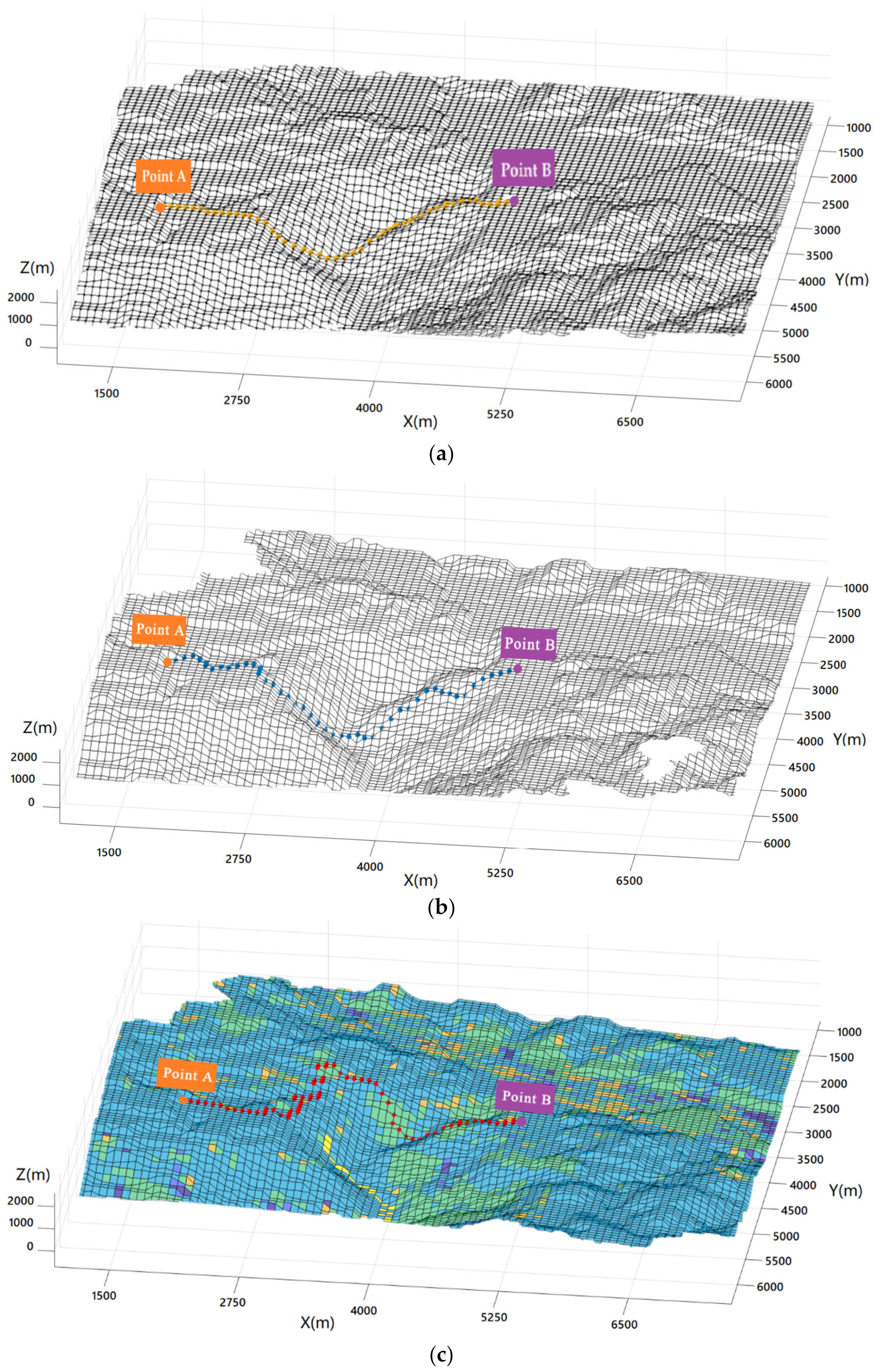
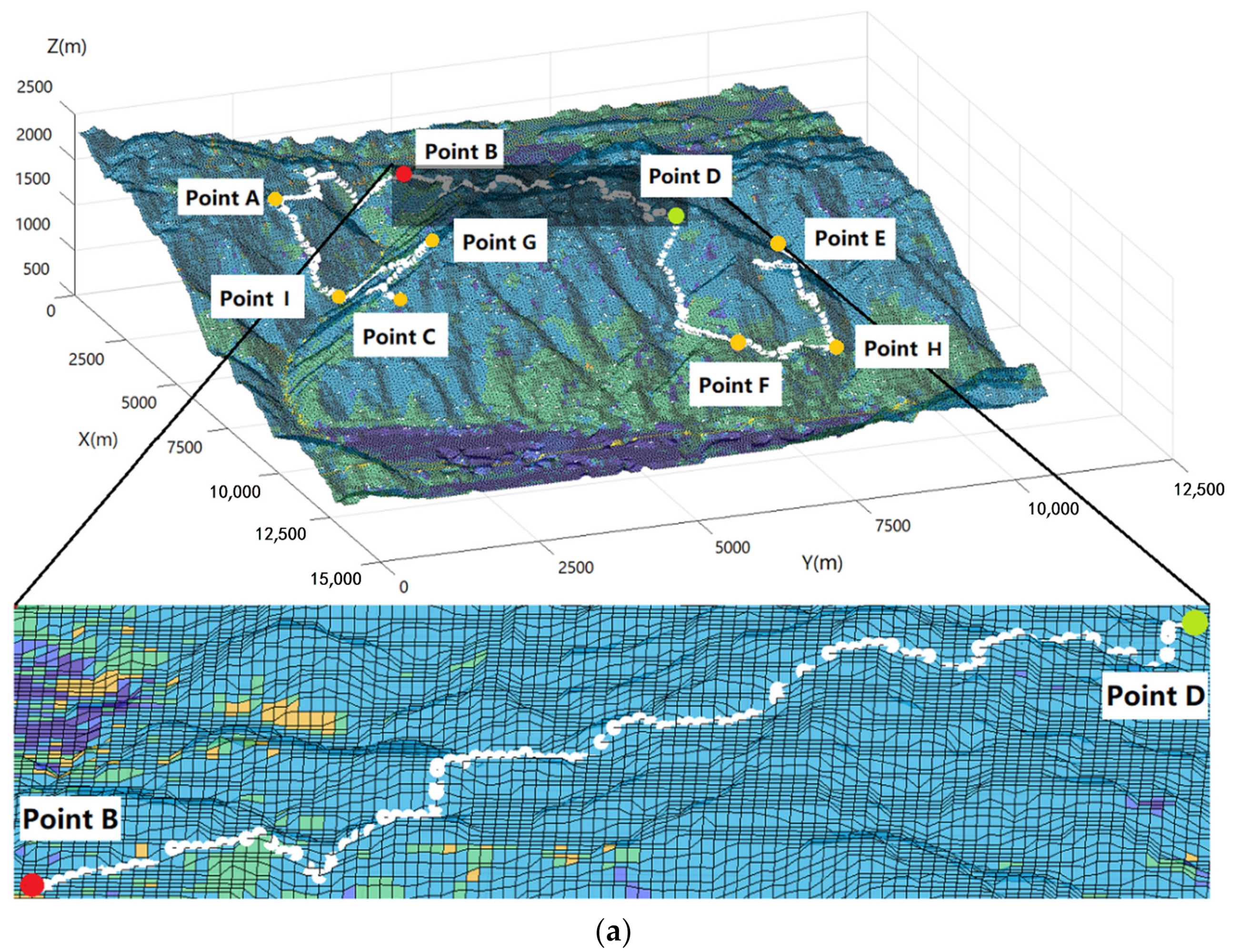
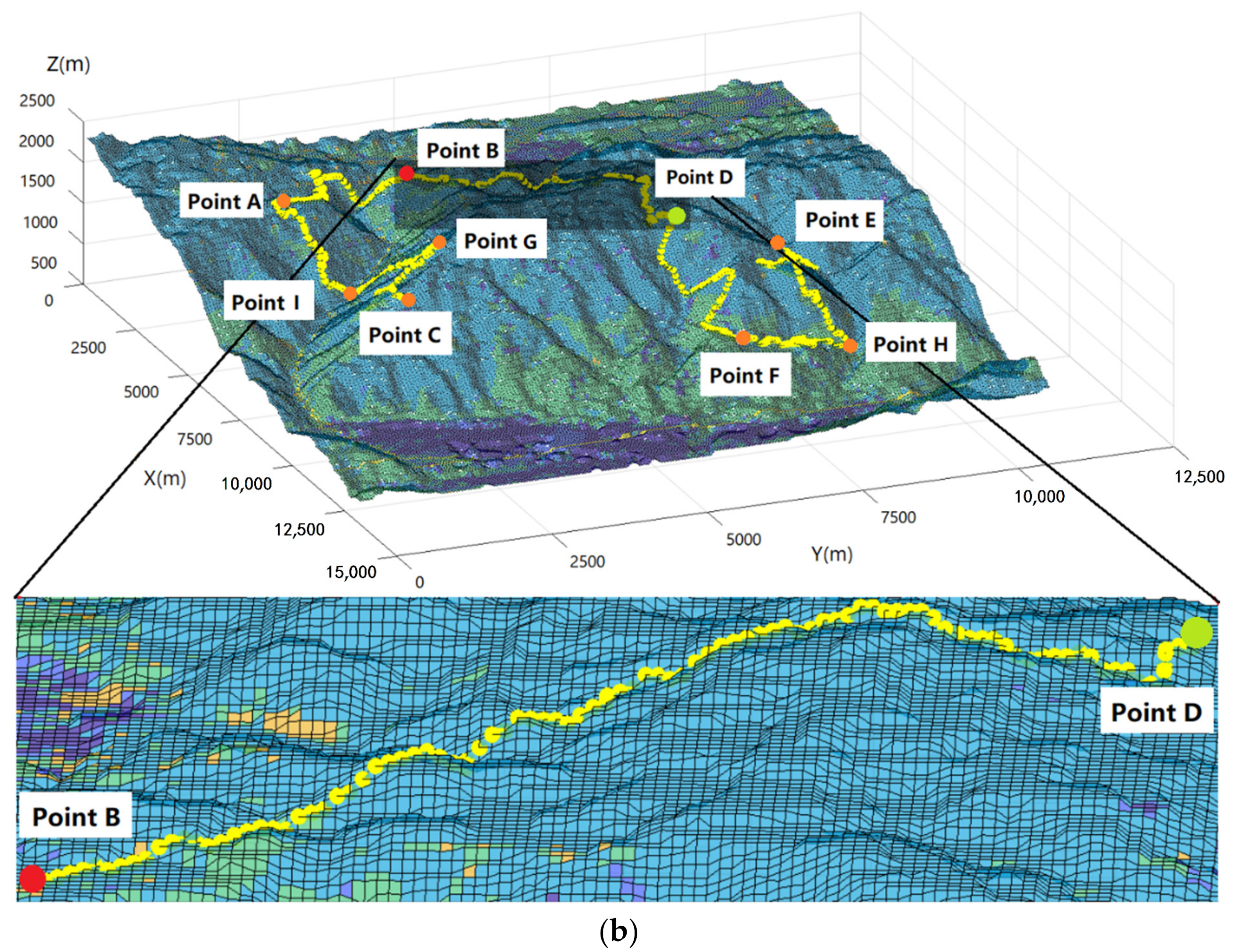
3.1. The Effect of Terrain on the A* Algorithm
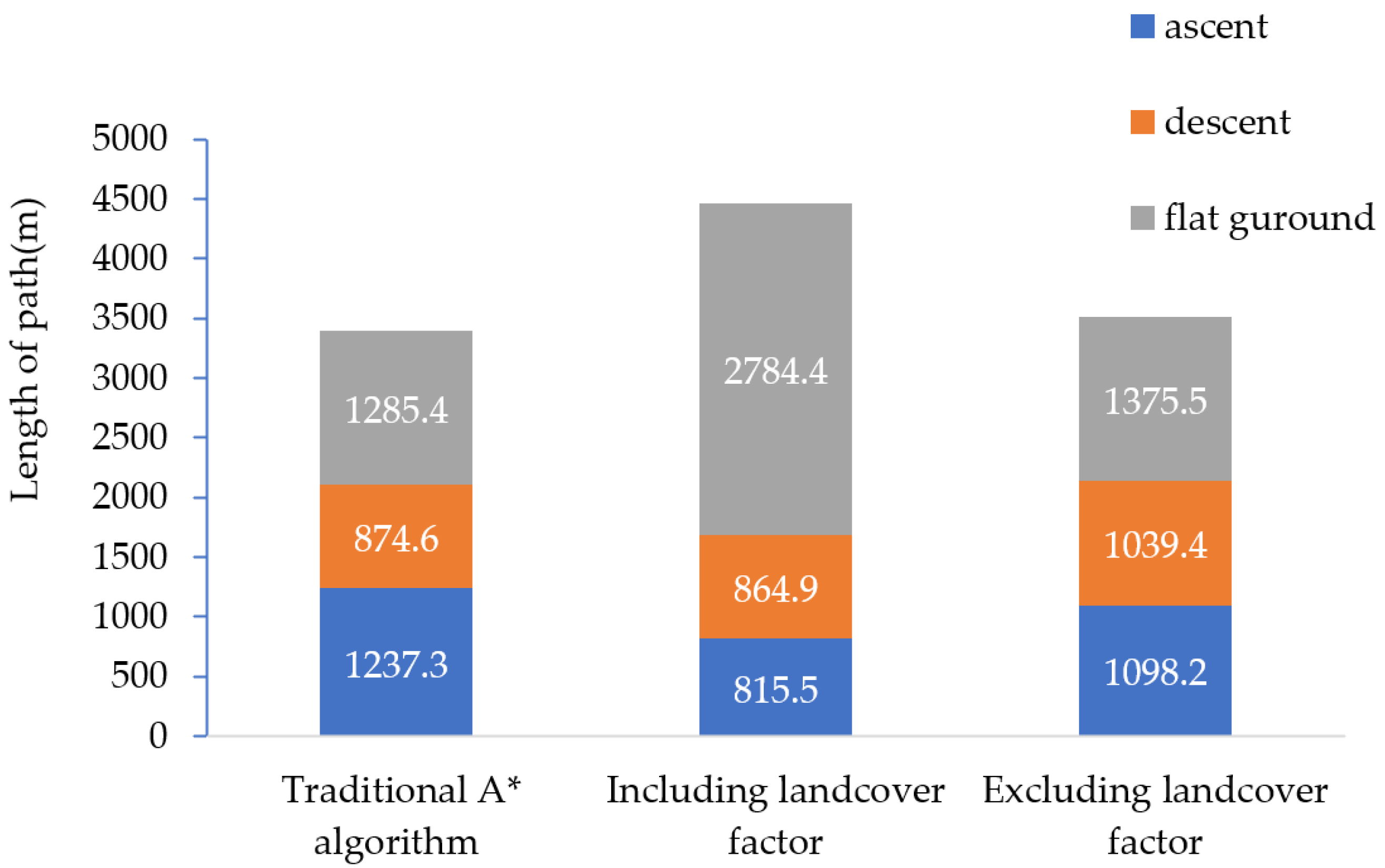
3.2. The Effect of Landcover on the A* Algorithm

| Path Planning Result Parameter | Experiment (a) Traditional A* Algorithm | Experiment (b) Excluding Landcover | Experiment (c) Including Landcover |
|---|---|---|---|
| Path length (m) | 3397.3 | 3513.1 | 4464.8 |
| Soil ground (m) | 811.4 | 843.1 | 2030.6 |
| Bush (m) | 2292.7 | 2424.3 | 2134.7 |
| Ascent (m) | 1237.3 | 1098.2 | 815.3 |
| Descent (m) | 874.6 | 1039.4 | 864.9 |
| Flat ground (m) | 1285.4. | 1375.5 | 2784.4 |
| Energy consumption (J) | 4.25 × 107 | 4.21 × 107 | 3.15 × 107 |
| Path | Method | Path Length (m) | Energy Consumption (J) | Energy-Saving Efficiency |
|---|---|---|---|---|
| A→B | A* algorithm | 3397.3 | 4.25 × 107 | / |
| Ours | 4464.8 | 3.15 × 107 | 25.9% | |
| D→F | A* algorithm | 4438.2 | 2.07 × 107 | / |
| Ours | 5010.7 | 1.85 × 107 | 10.6% | |
| F→H | A* algorithm | 1335.6 | 1.68 × 107 | / |
| Ours | 1598.7 | 1.61 × 107 | 4.7% |


3.3. The Effect of Changing the Fitness Function on the Particle Swarm Algorithm
3.3.1. Application of the Fused Particle Swarm Algorithm to the TSP
3.3.2. The Effect of Changing the Fitness Function
3.4. Computational Complexity Analysis of the Algorithm
4. Conclusions
- (1)
- The terrain factor and landcover factor were added to the evaluation function of the A* algorithm for complex field scenes. The improved A* algorithm can comprehensively analyze the friction coefficient of landcover, the slope value, and the energy consumption in complex field scenes, and it can thus give optimal path planning results. The path planning results have the characteristics of a small friction coefficient, a gentle slope, and energy efficiency. Therefore, the improved A* algorithm in this paper has better adaptability to complex field scenes.
- (2)
- To ensure path trafficability, stricter restrictions were set on the impassable points in the improved A* algorithm. By studying the turning conditions and the slope of the path, the path planning results can avoid bends and steep slopes that the vehicle cannot pass. Therefore, the improved algorithm ensures that the planned paths for various types of vehicles are passable.
- (3)
- A fusion of the improved A* algorithm and the particle swarm algorithm was proposed for multi-target 3D path planning in complex field scenes. The fused algorithm effectively realized multi-target path planning, and the optimal access order could meet the requirement of the lowest total path consumption. The result of the fusion algorithm in the multi-target path planning experiment is the route with the lowest energy consumption from the starting point to the end point. The algorithm in this paper produces more energy-efficient vehicle path planning.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Y.B.; Luo, Y.B.; Mei, Y.S.; Yu, J.Q.; Su, X.L. UAV path planning using artificial potential field updated by optimal control theory. Int. J. Syst. Sci. 2016, 47, 1407–1420. [Google Scholar] [CrossRef]
- Fan, X.J.; Guo, Y.J.; Liu, H.; Wei, B.W.; Lyu, W.H. Improved Artificial Potential Field Method Applied for AUV Path Planning. Math. Probl. Eng. 2020, 2020, 6523158. [Google Scholar] [CrossRef]
- Kothari, M.; Postlethwaite, I. A Probabilistically Robust Path Planning Algorithm for UAVs Using Rapidly-Exploring Random Trees. J. Intell. Robot. Syst. 2013, 71, 231–253. [Google Scholar] [CrossRef]
- Qureshi, A.H.; Ayaz, Y. Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments. Robot. Auton. Syst. 2015, 68, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Hurtado, I.; Martínez-Del-Amor, M.; Zhang, G.; Neri, F.; Pérez-Jiménez, M. A membrane parallel rapidly-exploring random tree algorithm for robotic motion planning. Integr. Comput. Aided Eng. 2020, 27, 121–138. [Google Scholar] [CrossRef]
- Duchon, F.; Babinec, A.; Kajan, M.; Beno, P.; Florek, M.; Fico, T.; Jurisica, L. Path planning with modified A star algorithm for a mobile robot. Model. Mech. Mechatron. Syst. 2014, 96, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.B.; Wang, L.; Qin, J.; Wu, Z.Z.; Duan, L.H. Path Planning of Automated Guided Vehicles Based on Improved A-Star. In Proceedings of the CT IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015. [Google Scholar]
- Zuo, L.; Guo, Q.; Xu, X.; Fu, H. A hierarchical path planning approach based on A* and least-squares policy iteration for mobile robots. Neurocomputing 2015, 170, 257–266. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef]
- Tuncer, A.; Yildirim, M. Dynamic path planning of mobile robots with improved genetic algorithm. Comput. Electr. Eng. 2012, 38, 1564–1572. [Google Scholar] [CrossRef]
- Bakdi, A.; Hentout, A.; Boutami, H.; Maoudj, A.; Hachour, O.; Bouzouia, B. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Robot. Auton. Syst. 2017, 89, 95–109. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B-Cybern. 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization—Artificial ants as a computational intelligence technique. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Shi, X.H.; Liang, Y.C.; Lee, H.P.; Lu, C.; Wang, Q.X. Particle swarm optimization-based algorithms for TSP and generalized TSP. Inf. Process. Lett. 2007, 103, 169–176. [Google Scholar] [CrossRef]
- Xu, G.P.; Cui, Q.L.; Shi, X.H. Particle swarm optimization based on dimensional learning strategy. Swarm Evol. Comput. 2019, 45, 33–51. [Google Scholar] [CrossRef]
- Zhang, X.; Lin, Q. Three-learning strategy particle swarm algorithm for global optimization problems. Inf. Sci. 2022, 593, 289–313. [Google Scholar] [CrossRef]
- Yu, J.L.; Su, Y.C.; Liao, Y.F. The Path Planning of Mobile Robot by Neural Networks and Hierarchical Reinforcement Learning. Front. Neurorobotics 2020, 14, 63. [Google Scholar] [CrossRef]
- Zhang, P.C.; Xiong, C.; Li, W.K.; Du, X.X.; Zhao, C. Path planning for mobile robot based on modified rapidly exploring random tree method and neural network. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418784221. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.M.; Huang, B.D.; Franti, P. A review of motion planning algorithms for intelligent robots. J. Intell. Manuf. 2022, 33, 387–424. [Google Scholar] [CrossRef]
- Lin, S.W.; Liu, A.; Wang, J.G.; Kong, X.Y. A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines 2022, 10, 773. [Google Scholar] [CrossRef]
- Gong, Y.J.; Li, J.J.; Zhou, Y.C.; Li, Y.; Chung, H.S.H. Genetic Learning Particle Swarm Optimization. IEEE Trans. Cybern. 2016, 46, 2277–2290. [Google Scholar] [CrossRef] [Green Version]
- Derrac, J.; Garcia, S.; Molina, D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]
- Bonyadi, M.R.; Michalewicz, Z. Particle Swarm Optimization for Single Objective Continuous Space Problems: A Review. Evol. Comput. 2017, 25, 1–54. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H.L. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. Int. J. Escience 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Coello, C.A.C.; Pulido, G.T.; Lechuga, M.S. Handling multiple objectives with particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 256–279. [Google Scholar] [CrossRef]
- Ji, W.D.; Wang, J.H.; Zhang, J. An Improved Real Hybrid Genetic Algorithm. Teh. Vjesn. Tech. Gaz. 2014, 21, 979–986. [Google Scholar]
- Zhan, Z.H.; Zhang, J.; Li, Y.; Chung, H.S.H. Adaptive Particle Swarm Optimization. IEEE Trans. Syst. Man Cybernetics. Part B Cybern. 2009, 39, 1362–1381. [Google Scholar] [CrossRef] [Green Version]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef] [Green Version]
- Qureshi, A.H.; Mumtaz, S.; Ayaz, Y.; Hasan, O.; Muhammad, M.S.; Mahmood, M.T. Triangular Geometrized Sampling Heuristics for Fast Optimal Motion Planning. Int. J. Adv. Robot. Syst. 2015, 12, 10. [Google Scholar] [CrossRef]
- Wu, Z.P.; Meng, Z.J.; Zhao, W.L.; Wu, Z. Fast-RRT: A RRT-Based Optimal Path Finding Method. Appl. Sci. 2021, 11, 11777. [Google Scholar] [CrossRef]
- Tang, G.; Tang, C.Q.; Claramunt, C.; Hu, X.; Zhou, P.P. Geometric A-Star Algorithm: An Improved A-Star Algorithm for AGV Path Planning in a Port Environment. IEEE Access 2021, 9, 59196–59210. [Google Scholar] [CrossRef]
- Shang, E.K.; Bin, D.; Nie, Y.M.; Qi, Z.; Liang, X.; Zhao, D.W. An improved A-Star based path planning algorithm for autonomous land vehicles. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420962263. [Google Scholar]
- Zhang, J.; Wu, J.; Shen, X.; Li, Y.S. Autonomous land vehicle path planning algorithm based on improved heuristic function of A-Star. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211042730. [Google Scholar] [CrossRef]
- Deng, W.; Xu, J.J.; Zhao, H.M. An Improved Ant Colony Optimization Algorithm Based on Hybrid Strategies for Scheduling Problem. IEEE Access 2019, 7, 20281–20292. [Google Scholar] [CrossRef]
- Elloumi, W.; El Abed, H.; Abraham, A.; Alimi, A.M. A comparative study of the improvement of performance using a PSO modified by ACO applied to TSP. Appl. Soft Comput. 2014, 25, 234–241. [Google Scholar] [CrossRef]
- Ab Wahab, M.N.; Nefti-Meziani, S.; Atyabi, A. A Comprehensive Review of Swarm Optimization Algorithms. PLoS ONE 2015, 10, e0122827. [Google Scholar] [CrossRef] [Green Version]
- Emad, E.; Tarek, H.; Donald, G. Comparison among five evolutionary-based optimization algorithms. Adv. Eng. Inform. 2005, 19, 43–53. [Google Scholar]
- Ji, X.; Xie, S. Coupling Mechanism of URTT Composite System in Yunnan Province Based on Structural Equation Model. Econ. Geogr. 2019, 39, 46–57. [Google Scholar]
- Xu, L.; Shao, D.; Wu, X.; Niu, T. Study on deformation and strain characteristics of Yunnan area based on least square configuration. Sci. Surv. Mapp. 2021, 46, 16–23, 74. [Google Scholar]
- Hu, Y.; Deng, L.; Kuang, X.; Wang, P.; He, S.; Xiong, L. Land Use Classification of High Resolution Remote Sensing Image Based on Texture Feature. Geogr. Geogr. Inf. Sci. 2011, 27, 5. [Google Scholar]
- Xia, Q.; Tang, Q.; Zhang, L. Quasi three dimensional robot path planning of the improved ant colony algorithm. Mod. Manuf. Eng. 2018, 4, 59–63, 143. [Google Scholar]
- Xu, P.; Ding, L.; Gao, H.; Zhou, R.; LI, N.; Deng, Z. Environmental Characterization and Path Planning for Legged Robots Considering Foot-terrain Interaction. J. Mech. Eng. 2020, 56, 21–33. [Google Scholar]
- Song, R.; Liu, Y.; Bucknall, R. Smoothed A* algorithm for practical unmanned surface vehicle path planning. Appl. Ocean. Res. 2019, 83, 9–20. [Google Scholar] [CrossRef]
- Bing, F.; Lin, C.; Zhou, Y.; Dong, Z.; Pan, H. An improved A* algorithm for the industrial robot path planning with high success rate and short length. Robot. Auton. Syst. 2018, 106, 26–37. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 2007, 4, 100–107. [Google Scholar] [CrossRef]
- Beijing University of Civil Engineering and Architecture. Garage Building Design Code JGJ100-2015; China Architecture and Building Press: Beijing, China, 2015. [Google Scholar]
- Ahn, C.; Peng, H.; Tseng, H.E. Robust estimation of road friction coefficient using lateral and longitudinal vehicle dynamics. Veh. Syst. Dyn. 2012, 50, 961–985. [Google Scholar] [CrossRef]
- Hou, H.L.; Song, M.L.; Pedrycz, W. A comparative study of improved GA and PSO in solving multiple traveling salesmen problem. Appl. Soft Comput. 2018, 64, 564–580. [Google Scholar]
- Mahi, M.; Baykan, O.K.; Kodaz, H. A new hybrid method based on Particle Swarm Optimization, Ant Colony Optimization and 3-Opt algorithms for Traveling Salesman Problem. Appl. Soft Comput. 2015, 30, 484–490. [Google Scholar] [CrossRef]













| Landcover | Friction Coefficient (µ) | Passable/Impassable |
|---|---|---|
| Road surface | 0.1 | Passable |
| Soil ground | 0.4 | Passable |
| Grass land | 0.5 | Passable |
| Stone ground | 0.8 | Passable |
| Bush | 0.9 | Passable |
| Water | / | Impassable |
| Subject | Type | Passable Range | Impassable Range |
|---|---|---|---|
| Medium vehicle | Ascent | (0°, 45°) | (45°, 90°) |
| Descent | (0°, 50°) | (50°, 90°) | |
| Large vehicle | Ascent | (0°, 25°) | (25°, 90°) |
| Descent | (0°, 30°) | (30°, 90°) |
| Algorithm | Time Frequency T(n) | Time Complexity O(n) |
|---|---|---|
| Improved A* algorithm | 47 × n | O(n) |
| PSO algorithm | 26 × N × M + 23 × M | O(N × M) |
| The fused algorithm | 47 × n + 26 × N × M + 23 × M | O(n + N × M) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, B.; Liu, Q.; Jiang, Z.; Che, D.; Qiu, K.; Shang, X. Energy-Efficient 3D Path Planning for Complex Field Scenes Using the Digital Model with Landcover and Terrain. ISPRS Int. J. Geo-Inf. 2023, 12, 82. https://doi.org/10.3390/ijgi12020082
Ma B, Liu Q, Jiang Z, Che D, Qiu K, Shang X. Energy-Efficient 3D Path Planning for Complex Field Scenes Using the Digital Model with Landcover and Terrain. ISPRS International Journal of Geo-Information. 2023; 12(2):82. https://doi.org/10.3390/ijgi12020082
Chicago/Turabian StyleMa, Baodong, Quan Liu, Ziwei Jiang, Defu Che, Kehan Qiu, and Xiangxiang Shang. 2023. "Energy-Efficient 3D Path Planning for Complex Field Scenes Using the Digital Model with Landcover and Terrain" ISPRS International Journal of Geo-Information 12, no. 2: 82. https://doi.org/10.3390/ijgi12020082